Document
advertisement

RobotC Programming
Making your robot move…
Eric and Christina Grajales
Mentor Exploding Bacon / DITU
FTC Teams 1902 / 5454
FTC Programming
Agenda
•
•
•
•
•
•
•
•
•
•
•
•
•
What is RobotC
Diagram your Robot
RobotC Setup and Configuration
How to display text
Your first program
Reading the joystick
Moving your robot
Servos
Timing
Sensors
Encoders
Useful Links
Questions
FTC Programming
What is RobotC
Industry Standard ‘C’
Programming Language
+
Programming Development
Environment
+
Complete and Total Solution for
User Program Development
Interactive Run-Time Debugger
+
High Performance Firmware
Language extensions for robotics
Built-in variables for robotics
devices
+
Training and Curriculum Support
RobotC has 100s of already built
functions to make programming your
robot easier
FTC Programming
Diagram your Robot
• How many Tetrix Motor Controllers are you using?
• How many Tetrix Servo Controllers are you using?
• How many NXT motors?
• What Sensors are you using?
FTC Programming
Diagram your Robot (cont)
• Good time to build an electrical wiring diagram.
• All this information is great for your engineering
notebook
FTC Programming
Diagram your Robot (cont)
• Draw your configuration on paper
• Name each motor, servo, sensor. Use names that
describe each part and what it does:
frontRightMotor
frontLeftMotor,
pincherServoLeft, etc
FTC Programming
Lets Build a Test Platform
•
•
•
•
•
•
•
•
•
•
•
•
1 Hitechnic Motor Controller
1 Hitechnic Servo Controller
2 Tetrix12 V Motors
1 Tetrix Servo
1 Lego Motor
1 Lego Light Sensor
1 Lego NXT with batteries
1 Tetrix Battery and Switch
At least 1 Joystick Controller
Laptop
USB, Bluetooth, Samantha connection
Cables and connectors
FTC Programming
Test Platform Wiring Diagram
FTC Programming
RobotC Setup and Configuration
• 1st time setup
• Install and RobotC
• Turn on NXT and connect NXT to computer via USB cable
• Download latest firmware (V2.25 - NXT0819.rfw)
• Note: If you upgrade from an older version of ROBOTC, make sure you
upgrade your firmware as well.
• Link via USB, name the NXT your team number
• Disconnect USB Cable
• Set RobotC platform type (NXT + Tetrix)
FTC Programming
RobotC Setup
The first time you fire up the ROBOTC IDE, there are a few quick things you will want to
do before you begin programming a FTC robot.
1. Set menu level from basic to “Expert”.
a. Window, Menu Level, Expert
2. Set platform type to “LEGO Mindstorms NXT + TETRIX”.
a. Robot, Platform Type, LEGO Mindstorms NXT + TETRIX
FTC Programming
Firmware
Download latest firmware to NXT brick.
* Note that this only needs to be done the first time you setup a new NXT brick with ROBOTC and when you upgrade
your version of ROBOTC.
** Also note that the battery level must be high enough on the NXT before it will allow you to download new firmware.
a. Make sure NXT is connected via USB and turned on.
b. Open Link Setup dialog
i. Robot, NXT Brick, Link Setup
c. Select NXT in top left corner and press “F/W Download” button.
d. Select .rfw file in default firmware directory in popup and press “Open”.
i. For ROBOTC v2.03, the firmware file should be: “NXT798.rfw”.
e. After a few moments, the Link Setup dialog box will display some verbose
information in the Message Log and your NXT should beep several times and
restart. When complete, you should see a series of messages similar to below
in the Message Log:
FTC Programming
Exercise
RobotC Setup and Configuration
• Robot C Setup
• Link via USB, Bluetooth, or Samantha to NXT
• Open the Sample program
“C:\Program Files\Robotics Academy\ROBOTC for MINDSTORMS\Sample Programs\NXT\LCD
Examples\NXT Draw Spiral.c”
• “Compile and Download” sample program to your NXT.
• Run the sample program.
FTC Programming
Tetrix Ranger
FTC Programming
Get to Configuration
Window
FTC Programming
Textrix Controller Setup
FTC Programming
Motor Setup
FTC Programming
Sensor Setup
FTC Programming
RobotC Pragma Setup
#pragma config(Hubs, S1, HTMotor, HTServo, none, none)
#pragma config(Sensor, S1, touch,
sensorI2CMuxController)
#pragma config(Sensor, S2, compass,
sensorVirtualCompass)
#pragma config(Sensor, S3, light,
sensorLightActive)
#pragma config(Sensor, S4, sonar,
sensorSONAR)
#pragma config(Motor, mtr_S1_C1_1, leftMotor, tmotorNormal, openLoop, encoder)
#pragma config(Motor, mtr_S1_C1_2, rightMotor, tmotorNormal, openLoop, reversed, encoder)
#pragma config(Servo, srvo_S1_C2_1, servo1,
tServoStandard)
#pragma config(Servo, srvo_S1_C2_2, servo2,
tServoNone)
#pragma config(Servo, srvo_S1_C2_3, servo3,
tServoNone)
#pragma config(Servo, srvo_S1_C2_4, servo4,
tServoNone)
#pragma config(Servo, srvo_S1_C2_5, servo5,
tServoNone)
#pragma config(Servo, srvo_S1_C2_6, servo6,
tServoNone)
//*!!Code automatically generated by 'ROBOTC' configuration wizard
!!*//
FTC Programming
Exercise
• Setup the Ranger Configuration in RobotC
FTC Programming
Task Main
•
•
•
Task main is used to tell the NXT where the beginning of your programs is.
The beginning and end of “task main” is denoted with curly braces “{ }”
When the program execution reaches the end of the main task, all robot
activity stops.
#include "JoystickDriver.c" // Tells ROBOTC to include the driver file for the joystick.
task main()
// All programs must have this task
{
while(true)
{
motor[rightMotor] = joystick.joy1_y1;
motor[leftMotor] = joystick.joy1_y2;
}
}
FTC Programming
Variables
•
Variables are the robot’s way of storing values for later use. They function as
containers or storage for values. Values such as sensor reading can be placed in a
variable and retrieved at a later time for convenient use. A variable is simply a place to
store a value.
Useful types:
• Integer, or “int” values are numbers with no fractional or decimal component.
• Floating point (“float”) numbers are so called because the decimal point “floats” around
in the value, allowing decimal places to be used.
• Strings (“string”): Text in ROBOTC is always a “string”. In ROBOTC, the word “Hello”
is really a collection of letters – ‘H’, ‘e’, ‘l’, ‘l’, ‘o’ – “strung” together to form a
single value.
• Boolean (“bool”) values represent “truth” or “logic” values, in the form of “true” or
“false”.
Use variable names that make sense.
What is more readable?
a = b / c;
Or
speed = distance / time;
FTC Programming
Conditional Statements
• If statements are pretty self explanatory. If a, then b.
• The syntax (grammar of programming) of an if statement is
If(4 < 100) {
Do stuff;
}
• If else statements run if the if statement was false. These are useful
for when there are multiple cases of an instance.
else if (4 == 100) {
Do stuff;
}
• Else statements follow the if before it. If the if statement was false
then the else statement will run.
else {
Do stuff;
}
FTC Programming
Boolean Logic
•
•
•
•
•
•
•
==
<
>
<=
>=
&&
||
equals
less than
greater than
less than or equal to
greater than or equal to
and
or
• NO (0 < a < 100)!!!! Use &&!
((0 < a) && (a < 100))
FTC Programming
Loops
• For loops run a certain number of times
(in this case, 10).
• Be careful of infinite loops (i--)
For (int i = 0; i < 10; i++;)
{
code that will repeat;
}
FTC Programming
Loops (cont.)
• While statements are used when you don’t know how many times
the code will run.
While (true)
{
do stuffffffffs;
}
• Do While statements always run at least once, and then follow the
while loop.
Do
{
more stuffffffssss;
}
While(true)
FTC Programming
Comments
Two ways to comment code:
•
•
Comments: // A single line
Comments: /* Section of code */
•
Comment your code, next year when you read the code you’ll know what you
did and why.
// Move motor C forward with 100% power
task main()
{
int motorspeed;
/* Motor C forward with 100% power
Do this for 3 seconds */
motorspeed = 100;
motor[motorC] = motorspeed;
wait1Msec(3000);
}
FTC Programming
How to display text
Display text functions:
• eraseDisplay() - Erases the complete NXT LCD display
• nxtDisplayClearTextLine(nLineNumber)
• nxtDisplayCenteredTextLine(nLineNumber, sString)
• nxtDisplayCenteredTextLine(nLineNumber, sFormatString, parm1, parm2)
• nxtDisplayString(nLineNumber, sFormatString, parm1, parm2, parm3)
• nxtDisplayTextLine(nLineNumber, sFormatString, parm1, parm2, parm3)
• nxtDisplayTextLine(nLineNumber, sString)
Where nLineNumber is the NXT LCD line number and sFormatString
specifier
Output
Example Code Example Output
%d
Signed decimal integer
"%d"
4246
%f
Decimal floating point
"%f"
3.14159
%s
String of characters
"%s"
ROBOTC
FTC Programming
sFormatString Example
• Read raw and normal light sensor data on the NXT
• If you want to print “Raw: 333 Normal: 96”
sFormatString will look like
“Raw: %d Normal: %d”
• Param1 and Param2 are variables, in this case the raw and
normalized light sensor data. Generally, these are constructed
in the beginning of the code with names like rawLightData and
normalLightData.
• nxtDisplayTextLine(2, “Raw: %d Normal: %d”,
rawLightData, normalLightData);
FTC Programming
How to display text (cont)
When using FTC Template the NXT LCD displays Field Management System (FMS)
information used by the Field Technical Advisor during competitions.
•
•
•
•
•
•
•
•
Line 0 NXT status line (do not touch) – Battery Status, Bluetooth enabled, etc
Line 1 FCS Mode (Waiting, Auto, Teleop)
Line 2 BLANK
Line 3 External Battery Voltage (Textrix 12 Volt battery)
Line 4 NXT Battery Voltage
Line 5 FMS Msgs count
Line 6 "Teleop FileName:"
Line 7 NXT Teleop file name
Items in bold are refreshed every 200ms. DO NOT OVERWRITE THESE LINES!
FTC Programming
How to display text (cont)
Sample Program
task main()
{
int int_test = 1234;
float float_test = 3.14159;
eraseDisplay(); // Clear out the NXT LCD Screen
nxtDisplayCenteredTextLine(2, “Hello”);
nxtDisplayTextLine(3, “Data %d %f”, int_test, float_test);
wait1Msec(5000); // Wait 5 seconds
}
•“Compile and Download” sample program to your NXT.
•Run the sample program.
FTC Programming
Exercise
• Using the example on the previous slide,
compile and run the code on the virtual world
robot.
FTC Programming
Joystick Controller
•
•
•
•
Logitech PS2 type controller
2 Joysticks
10 Buttons
Access Joystick via built in functions:
joystick.joy1_x1
joystick.joy1_y1
joystick.joy1_x2
joystick.joy1_y2
return integer ranges between -127 and 127
joy1Btn(button) // (button 1 thru 10)
returns the a value of 1 (true) if pressed and a value of 0 (false)
if not pressed.
•
•
Similar functions for Joystick2.
Must “#include "JoystickDriver.c "“ in your
program
FTC Programming
Joystick Controller (cont)
Sample 1
#include "JoystickDriver.c" // Tells ROBOTC to include the driver file for the joystick.
task main()
{
while(true)
{
if (joy1Btn(1))
// If Joy1-Button1 is pressed:
{
motor[motorA] = 100;
// Turn Motor A On at full power
}
else
// If Joy1-Button1 is NOT pressed:
{
motor[motorA] = 0;
// Turn Motor A Off
}
}
}
Sample 2
#include "JoystickDriver.c" // Tells ROBOTC to include the driver file for the joystick.
task main()
{
while(true)
{
motor[motorC] = joystick.joy1_y1;
motor[motorB] = joystick.joy1_y2;
}
}
FTC Programming
Tank Drive
Forward
Right
FTCBackward
Programming
Move Simple Bot
Tank Mode - uses both left and right joysticks to drive the
robot.
void tank(int y1, int y2)
{
motor[motorC] = y1;
motor[motorB] = y2;
}
Arcade Mode – only one joystick as controller
// uses x1 and y1 from joystick1
void arcade(int x, int y)
{
int powY;
int powRightMotor;
int powLeftMotor;
task main()
{
while (true) {
tank(joystick.joy1_y1, joystick.joy1_y2);
}
}
powY = y;
if (x < 0) // if x negative, turning left; otherwise, turning right
{
powLeftMotor = (powY * (128 + (2 * x))/128); // left motor reduced for right turn
powRightMotor = powY;
// right motor not changed
}
else
{
powRightMotor = (powY * (128 - (2 * x))/128); // right motor reduced for left turn
powLeftMotor = powY;
// left motor not changed
}
motor[motorC] = powLeftMotor;
motor[motorB] = powRightMotor;
}
task main()
{
while (true) {
arcade(joystick.joy1_x1, joystick.joy1_y1);
}
}
FTC Programming
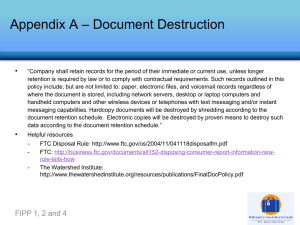
Improving Drive Code
While the Tetrix motors accept an output power range of 100 to +100, the analog sticks on the joystick return values between -128 to +127.
This means if the analog stick is in the range under -100 or over +100, the value passed to the motor is simple transformed to -100 or +100.
This is less than ideal because it reduces the usable range of the analog stick by about 20%.
There is another issue related to dead zones within the physical joysticks themselves. Due to inaccuracies and tolerances within the
manufacturing process, the analog sticks on most FTC joysticks will rarely return to a perfect zero when released. This has a tendency to
cause a robot to slowing spin in a circle when no one is touching the analog sticks. A simple code solution is to account for a dead zone at
low values for the analog sticks which can then be treated as zero.
The basic formula:
motorValue = (joystickValue / Max joystickValue) * max motorOutput
int scaleForMotor(int joyvalue)
{
const int DEADZONE = 5;
const int MAX_MOTOR_VAL = 100;
const float MAX_JOY_VAL = 127.0;
A logarithmic scale to get fine grain control at lower speeds and quickly
scale the power up at the end of the range.
motorValue = (joystickValue^2 / Max joystickValue^2) * max motorOutput
int scaleForMotor(int joyvalue)
{
const int DEADZONE = 5;
const int MAX_MOTOR_VAL = 100;
const float MAX_JOY_VAL = 127.0;
if (abs(joyValue) < DEADZONE) { // Check if joystick value is
return 0;
// less than deadzone
}
// Scale joystick value
float ratio = joyValue / MAX_JOY_VAL;
int scaledVal = ratio * MAX_MOTOR_VAL;
if (abs(joyValue) < DEADZONE) { // Check if joystick value is
return 0;
// less than deadzone
}
// Scale joystick value
int direction = joyValue / abs(joyValue);
float ratio = (joyValue * joyValue) / (MAX_JOY_VAL * MAX_JOY_VAL);
int scaledVal = ratio * MAX_MOTOR_VAL * direction;
// return scaled value
return scaledVal;
}
// return scaled value
return scaledVal;
}
FTC Programming
Motor Control
100
90
Motor Output
80
70
60
Simple
Logarithmic
50
40
30
20
10
0
1
13
25
37
49
61
73
85
Joystick Value
FTC Programming
97 109 121
Move your Robot Sample
#include "JoystickDriver.c"
// Tells ROBOTC to include the driver file for the joystick.
void tank(int y1, int y2)
{
motor[LeftMotor] = y1;
motor[RightMotor] = y2;
}
int scaleForMotor(int joyvalue)
{
const int DEADZONE = 5;
const int MAX_MOTOR_VAL = 100;
const float MAX_JOY_VAL = 127.0;
if (abs(joyValue) < DEADZONE) { // Check if joystick value is
return 0;
// less than deadzone
}
// Scale joystick value
float ratio = joyValue / MAX_JOY_VAL;
int scaledVal = ratio * MAX_MOTOR_VAL;
// return scaled value
return scaledVal;
}
task main()
{
while (true) {
tank(scaleForMotor(joystick.joy1_y1), scaleForMotor(joystick.joy1_y2));
}
}
FTC Programming
Exercise
• Move your Robot
• Write code to move the 12V tetrix motors with your
joystick.
• Compile and download it to your NXT
• Run the code and move your joystick to see the motors
turn.
FTC Programming
What is a Servo?
• There are two types of servos:
Standard Servos and
Continuous Rotation Servos
(almost like a super low
powered motor).
• An example of when to use a
standard servo would be the
balance bridges from the FTC
2010 game. Many teams had a
metal arm that would lower the
bridge so that the robot could
cross it. (Think moving in arcs)
FTC Programming
Servos
•
servoValue[servo#] - Standard Servo Only
This read-only function is used to read the current position of the servos on a sensor port Servo
controller. Values can range from 0 to 255. Center Point value 127. The value returned in this
variable is the last position that the firmware has told the servo to move to. This may not be the
actual position because the servo may not have finished the movement or the mechanical design
may block the servo from fully reaching this position. To set the position of a servo, use the
"servoTarget" or "servo" functions.
•
servo[servo#] = position or servoTarget[servo#] = position;
This function is used to set the position of the servos on a sensor port Servo controller. Values
can range from 0 to 255. The firmware will automatically move the servo to this position over the
next few update intervals. (Be sure to give the servo some amount of time to reach the new
position before going on in your code.)
•
servoChangeRate[servo#] = changeRate;
Specifies the rate at which an individual servo value is changed. A value of zero inidcates servo
will move at maximum speed. The change rate is a useful variable for "smoothing" the movement
of the servos and preventing jerky motion from software calculated rapid and wide changes in the
servo value. The default value is a change rate of 10 positions on every servo update which
occurs. (updates occur every 20 milliseconds)
FTC Programming
Servos Sample
#include "JoystickDriver.c"
task main()
{
while(true)
{
if (joy1Btn(1))
// If Joy1-Button 1 is pressed:
{
servoTarget[1] = 255; // Turn servo clockwise
}
else if (joy1Btn(3))
// If Joy1-Button 3 is pressed:
{
servoTarget [1] = 0; // Turn servo counter clockwise
}
else
{
servoTarget [1] = 127; // Center servo
}
}
}
FTC Programming
Exercise
• Move your Servo
• Write code to move the servo using a joystick button
joystick.
• Compile and download it to your NXT
• Run the code and press the joystick to see the servo
turn.
FTC Programming
Timing
Functions to pause the program for a desired amount time:
wait1Msec(nMSec);
wait10Msec(nTenMSec);
•
Program execution will wait for the specified number of clock units. Units can be in either 1millisecond or 10-millisecond counts. The maximum interval that can be specified is either 32.767
seconds or 327.67 seconds depending on which function is used.
There are four timers (T1, T2, T3 and T4) the user can program. These four timers can be individually
be reset to zero within a program. Theses timers are useful for measuring elapsed time of events.
ClearTimer(theTimer);
•
Timers start counting as soon as the NXT is powered on. A user's program should reset a timer
before using it, so use this function to reset the value of the specified timer to zero.
time1[theTimer], time10[theTimer], time100[theTimer]
•
These three arrays hold the current value of the respective timers. Each of the timer values can be
retrieved in units of 1, 10 and 100 milliseconds depending on which array is used. For example,
time1[T1] retrieves the value of timer T1 in units of 1-msec and time10[T1] retrieves the value
using a 10-msec tick.
FTC Programming
Timing Sample
#include "JoystickDriver.c"
task main()
{
ClearTimer(T1);
// Resets Timer T1 to 0
while(time1[T1] < 5000) // Loop for 5 seconds
{
// do something in loop
wait1Msec(500); // Wait ½ second
}
}
FTC Programming
Types of Sensors
• Light Sensor
• Detects amount of light (grayscale); two modes: with flashlight
and without
• Touch Sensor
• Detects if the sensor hit something
• Ultrasonic/Sonar Sensor
• Detects how far an object is from the sensor
• Gyro
• Detects angle based off initialized 0
• Compass
• Detects True North
FTC Programming
Sensors
SensorType[] –
• The SensorType array is used to specify what type of sensor is connected
to a certain port. Most users should not have to use this functionality and
should use the Motors and Sensor Setup instead.
Example: SensorType[sonarSensor] = sensorSonar;
SensorRaw[]
• This array value will return the "raw" (un-normalized) value of a sensor.
Usually this is the raw A-D converted value, which is an analog value
between 0 to 1023.
SensorValue[]
• This array value returns the value of the sensor in a normalized fashion.
Rather than returning a raw value of 0 to 1023, ROBOTC will interpret the
data from the "SensorType" and return a more accurate representation of
the sensor's data. An example of this is the Light Sensor, which will return a
percentage value from 0 to 100.
FTC Programming
Sensor Sample
#include "JoystickDriver.c"
task main()
{
wait1Msec(50);
//the program waits 50 millisecond to initialize the light sensor
// 0 black, 100 white
while(SensorValue[lightSensor] > 80) //keep looping while the light sensor's value is greater than 80.
{
motor[leftMotor] = 75;
//leftMotor is run at a 75 power level
motor[rightMotor] = 75;
//rightMotor is run at a 75 power level
}
motor[leftMotor] = 0;
motor[rightMotor] = 0;
//leftMotor is stopped
//rightMotor is stopped
}
FTC Programming
Exercise
•
•
•
•
Using the previous Light Sensor sample
Compile and run inside Virtual World
Use the “Learning RobotC Tables”
In VW, select the Utilities Tab, Light Sensor Table,
Position F to run the example.
FTC Programming
Tetrix Motor Encoders
Enables your robot to move a fixed distance, rotate to a specific position,
or move at a constant speed.
The technique to measure the movement of your robot is called odometry,
it requires an encoder that translates the turns of the wheel into the
corresponding traveled distance.
The Tetrix Encoder measures rotation 1440 ticks per revolution – if robot
is geared you will need to compute gear reduction factor and wheel
size to computer distance travelled per encoder tick.
FTC Programming
Tetrix Motor Encoders
• Assuming direct drive and 4 inch wheel, 1 rotation of the
motor will move the robot 12.6 inches (Circumference of
wheel is = 2 * pi * radius)
• If we want to travel 20 inches, then we need to compute
the number of ticks the encoder must measure =
(1440 ticks/revolution)/(12.6 inches/revolution) * 20
inches is about 2285 ticks.
FTC Programming
Motor Encoders Functions
nMotorEncoderTarget[] - The nMotorEncoderTarget is used
to set a target distance that a motor should move before
system puts motor back in idle or stopped state. A target
value of 0 (zero) means run forever.
nMotorRunState[] - Array containing the internal state of a
NXT motor. Useful in checking when a motor movement
"command" has finished. There are three different states
- runStateRunning, runStateHoldPosition, runStateIdle.
nMotorEncoder[] – Array containing the current encoder
value
FTC Programming
Encoder Sample
#include "JoystickDriver.c"
task main()
{
int rotations = 1440.0 * 20.0 / 12.6;
nMotorEncoder[motorB] = 0;
// Reset the Motor Encoder of Motor B.
nMotorEncoderTarget[motorB] = rotations; // Set the target to 5 rotations.
motor[motorB] = 75;
motor[motorC] = 75;
// Motor B is run at a power level of 75.
// Motor C is run at a power level of 75.
while(nMotorRunState[motorB] != runStateIdle) // While Motor B is still running
{
wait1Msec(50);
}
// or
while (nMotorEncoder[motorB] < rotations) // wait for motor to reach a specific # of ticks
{
wait1Msec(50);
}
motor[motorB] = 0;
motor[motorC] = 0;
// Motor B is stopped at a power level of 0.
}
FTC Programming
How to turn accurately
• To do a 1 wheel turn, where one side of the robot drivetrain
is stopped, and the other side turns.
• Arc Distance = 2 * pi * radius (width of robot) * angle / 360
• Then use encoders and their ticks-to-inch ratio from earlier
to calculate the offset of the right encoder from the left one.
Example: An 18 in wide robot would
travel how much in a 90 degree turn?
Answer:
28.27 inches
3240 ticks
before
after
FTC Programming
Simplify your Code with
Functions
• A function is a self-contained collection of instructions that, when
called, accepts a specified number of arguments, performs some
task, and returns a value back to the calling program
•
Example :
moveForward(int num_inches)
{
int rotations_ticks;
float wheel_diameter;
wheel_diameter = 4.0;
// 1440.0 is the number of ticks per wheel rotation, if wheels are geared verify this value
// (num_inches / wheel perimeter), calculates the number of wheel rotations
rotation_ticks = 1440.0 * num_inches / (wheel_diameter * 3.14159);
nMotorEncoder[motorB] = 0;
wait1Msec(10);
// Reset the Motor Encoder of Motor B.
// always wait some time after setting nMotorEncocder
motor[motorB] = 75;
// Motor B is run at a power level of 75.
motor[motorC] = 75;
// Motor C is run at a power level of 75.
while (nMotorEncoder[motorB] < rotations_ticks) // wait for motor to reach a specific # of ticks
{
wait1Msec(50);
}
motor[motorB] = 0; // Motor B and C are stopped at a power level of 0.
motor[motorC] = 0;
}
task main()
{
moveForward(30); // call function
}
FTC Programming
Functions
• Good set of functions to write for your robot:
•
•
•
•
•
moveForward (int num_inches)
turnRight(int num_degrees)
turnLeft(int num_degrees)
MoveBackwards(int num_inches)
scaleForMotor(int joyValue)
FTC Programming
Exercise
• Putting it all together
FTC Programming
Useful References and Links
ROBOTC.net
The main website for ROBOTC is one of the best resources for getting help or interacting with other
members of the ROBOTC community. You can email their technical support if you have a
technical issue with the software/IDE itself or if you want to report a bug. But often more useful are
the forums. There is a sub-forum dedicated to FTC and most posts there are responded to the
same day. I personally make an effort to visit the forum daily during the build season as do a
number of other mentors. It may be the best place to get help and feedback from a largest
number of smart folks familiar with ROBOTC.
Main website: http://www.robotc.net/
Forums: http://www.robotc.net/forums/
Blog: http://www.robotc.net/blog
Robotics Academy Curriculum
Robotics Academy, the non-profit affiliated with Carnegie Melon University who created ROBOTC,
offer a number of training resources. Note that some of these are not free.
Main Website: http://www.robotc.net/education/curriculum/nxt/
Preview Website :
http://www.education.rec.ri.cmu.edu/previews/robot_c_products/teaching_rc_tetrix_preview/index.html
Classes: http://www.robotc.net/education/training/nxt/
Webinars: http://www.robotc.net/education/webinars/
Older videos & tutorials: http://www.education.rec.ri.cmu.edu/content/events/ftc/robotc/index.htm
Tetrix for FTC
http://www.tetrixrobotics.com/ftc/
FTC Programming
Useful References and Links
Xander’s 3rdParty Drivers
Xander Soldaat is a regular contributor to the NXT community who maintains a set of excellent third
party drivers for NXT compatible sensors. These drivers offer enhanced functionality for using just
about any sensor with ROBOTC and I highly recommend them; particularly so if you are using the
IR Seeker or Sensor Multiplexer.
3rdParty Drivers: http://rdpartyrobotcdr.sourceforge.net/
Blog: http://mightor.wordpress.com/
Chief Delphi
For years, the forums on Chief Delphi have been the most active and engaging source for unofficial
FIRST related information. It is an extremely dynamic online community of FIRST students,
mentors, and volunteers. As such, it is another great resource for help with not only ROBOTC, but
FTC and FIRST in general.
Main website: http://www.chiefdelphi.com/forums/index.php
FTC sub-forum: http://www.chiefdelphi.com/forums/forumdisplay.php?f=146
Course Notes – Albert Schueller, Whitman College
One of the best ROBOTC tutorials can be found in the class notes from Albert Schuellers’s course on
programming with robots at Whitman College. This is a good read through which covers many of
the basics/fundamentals that this guide does not.
PDF of tutorial: http://carrot.whitman.edu/Robots/notes.pdf
FTC Programming
Acknowledgments
1.
2.
3.
4.
FTC-Iowa 3-day Coaches Workshop, June 13th to 15th, 2010 –
University of Iowa, Supplemental Guide for ROBOTC
Programming
Programming with Robots, Albert W. Schueller, Whitman
College, October 12, 2011
Xander’s 3rdParty Drivers
Robotics Academy Curriculum
FTC Programming
Questions
FTC Programming