Slide 1 - Analog Devices
advertisement

Agenda
Basic
inertial MEMS sensor functions
New products, opening markets through performance
Five steps of MEMS sensor integration
Typical applications
Identifying the right opportunities
Understand key specifications for these opportunities
Getting started information.
Basic Inertial MEMS
Sensor Functions
Analog Devices High Performance Inertial MEMS
Accelerometer contribution to angle estimates
use the earth’s gravitational force and
trigonometric functions to measure incline angles
Number of axes is driven by range & system needs
Accelerometers
Triple-axis
aZ
aX
09593-013
aY
Single-axis
x a sin a x
Dual-axis
ay
x a tan
a
x
aP
atan 2
2
2
K
a
a
R
G
GP
aR
atan2
2
2
K
a
a
P
G
GP
aG
atan2
2
2
K
a
a
P
R
GP
Analog Devices High Performance Inertial MEMS
Gyroscope contribution to angle estimates
Gyroscopes
measure the rate of
rotation, which serves as a
feedback sensing signal in
platform stabilization systems.
AXIS OF ROTATION
m K a
functions, such as
Attitude, Heading & Reference
Systems (AHRS) integrate
gyroscope outputs to measure
angular displacement.
t2
t dt
m
t1
PIN 10
PIN 1
PIN 5
PIN 6
NOTES
1. ARROW INDICATES THE DIRECTION OF ROTATION
THAT PRODUCES A POSITIVE RESPONSE IN
THE GYRO_OUT REGISTER.
08246-022
Navigation
Analog Devices High Performance Inertial MEMS
Magnetometer contribution to angle estimates
Magnetometers
measure magnetic field intensity.
Navigation functions, such as Attitude, Heading &
Reference Systems (AHRS) use triple-axis magnetic field
measurements to determine orientation and heading
angles.
0.5 Gauss
θ
my
a tan
m
x
m
a tan z
2
2
mx my
Five Steps of MEMS Sensor
Integration
Analog Devices High Performance Inertial MEMS
Typical MEMS Integration Process
Temperature
Supply
MEMS
Element
Buffer
Analog
Filter
A/D
Converter
Motion
System
Specific
Correction
Correction
Formulas
+
x
Controller
Digital
Filter
Functional
Processing
Interface
Configuration
Five Steps to MEMS integration:
1. Sensor selection that supports end-system performance goals
2. Interface circuit that preserves key performance metrics
3. Packaging that provides mechanical stability and protection from changing stress patterns
4. Calibration approach and system that optimizes key accuracy metrics
5. Application-specific algorithm development
New IMU/Gyroscopes
Selection Guide – Functional/Integration Summary
3-Axis
MEMS
Gyro
+
x
gx, gy, gz
Filtering
ΔΘx, ΔΘy, ΔΘz
Correction
Formulas
(Temp, Vdd)
Alignment
ax, ay, az
3-Axis
MEMS
Accel
+
x
Filtering
ΔVx, ΔVy, ΔVz
Correction
Formulas
(Temp, Vdd)
Tactical Grade 6 DoF
ADIS16334, ADIS16445
ADIS16485
Dynamic Orientation Sensing
Magnetometers
(3x)
Barometer
•
•
Compact 10 DoF
•
ADIS16448
ADIS16448
Extended Kalman Filter
Quaternion, Euler, Rotation
Matrix
Adaptive, and Programmable
ADIS16488
ADIS16480
Precision Roll/Pitch/Yaw Outputs Under Dynamic Conditions
High Performance MEMs, Plus Industry Best Sensor Processing, Plus Adaptive Kalman Filtering
Conceptual Kalman Filter
St-1
Ct-1
Predicted
State
St’
Ct’
St
Ct
FILTER
Physical
Model
Local Navigation Frame
(Reference for ADIS16480 Outputs)
IMU
MAGN
GPS
Measurements
Initial
State
Body Frame
(IMU orientation within
user platform)
Yb
Zn
ob
Yn
Xb
Position/Track
S: State of System
C: Covariance
on
Zb
Other
Xn
Implemented in 16480
Not Implemented
ADIS16480 Outputs
ADIS16480 Adaptive Extended Kalman Filter
Automatic Covariance Computation
Programmable Sensor Disturbance/Rejection
Thresholds
Configurable Event-Driven Controls
Standard IMU Outputs
Attitude and Heading Outputs
Quaternion Vector and Euler Angles
Rotational Matrix
Reference Orientation is field
programmable
IMU Selection Guide
Simplified Performance/Package Summary
Extended
Kalman Filter
GYROSCOPES
Range
(°/sec)
ACCELEROMETERS
Noise
In-run Bias
Density
Stability
Linear-g
gxg
(°/hour/√Hz
)
(°/hour) (°/hour/g) (°/hour/g²)
MAGNETOMETER BAROMETER
PACKAGE
(Roll/Pitch/Yaw
Outputs)
Noise In-run bias
Density stability
Range
Range
Size
(g)
(µg/√Hz)
(µg)
(Gauss)
(Bar)
(mm)
n/a
Range
ADIS16334
±300
0.044
26
180
1.8
±5
221
200
N/A
N/A
24.2x32.7x10.6
n/a
** ADIS16445
* ADIS16448
* ADIS16485
ADIS16488
TBD
0.01
14
54
0.36
±5
221
50
N/A
N/A
24.2x37.7x10.6
n/a
±1000
0.01
14
54
0.36
±18
500
150
±1.9
±1.2
24.2x37.7x10.6
n/a
±450
0.00667
6
32.4
0.36
±5
62
32
N/A
N/A
44x47x14
n/a
±450
0.00667
6
32.4
0.36
±18
67
100
±2.5
±1.2
44x47x14
n/a
±450
0.00667
6
32.4
0.36
±10
67
100
±2.5
±1.2
44x47x14
YES
* ADIS16480
* :New
**:Upcoming
ADIS16334
ADIS16445/8
Common Performance Benefits
• Bias tempco = 0.0025-0.0005°/sec/°C
• Sensitivity tempco = 35-50ppm/°C
• Bandwidth = 330Hz
• Linearity = 0.01%
ADIS16480/5/8
Common “Ease of use” Benefits
• Simple hook-up: power, ground, SPI
• Fully-calibrated, off-the-shelf accuracy
• Migration supported through compatible pin
assignments & packaging
Finding the right applications
Focus on performance-driven applications
Cost-driven
1-10°
accuracy
Static/simple motion
Low
bandwidth & samples
rates are acceptable
Constrained
motion
Performance-driven
0.05-2°
accuracy
Dynamic conditions
Value
in wide BW & high
sample rates
Complex
motion
Rotational
Cross-axis,
linear-g, gxg
specs are often not specified
Package
sensitivity
Narrow temperature range
0°C
to +70°C
Short
life cycles
and linear/3-axis
Cross-axis, linear-g, gxg
specs are important
Robust
packaging
Wider temperature range
-40°C
Life
to +105°C
cycles ~15-20 years
Where to Look for Opportunities
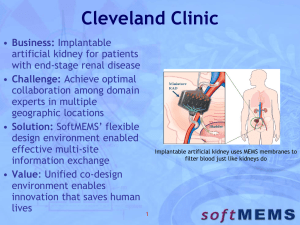
Customer Problem:
1) Highly Complex Motion, requiring:
More precision than available from the ‘raw’ sensor
Need Significantly more Sensor Conditioning/Calibration/Tuning
Merging of Multiple Sensor Types, and understanding of interactions
Sophisticated back-end Sensor Processing (Kalman Filtering) to resolve
actual motion
2) Implementation Obstacles of:
motion/sensor-dynamics learning curve
multi-year design effort
non-standard test equipment
high program risk
Requires Motion
Dynamics Expertise
‘Raw’
Sensor
‘Refined’
Sensors
ADIS16448 and ADIS16485
Address this Gap
Requires Deep
Appl Knowledge
Actual
Position/Motion
Information
ADIS16480
Addresses this Gap
Application Space/Positioning for ADI High Performance
IMUs, and Orientation Sensors
Application Examples
Complex platform stabilization
and control
- Antennas
- Surveillance cameras
- Precision optics
- Robotics
- Medical instrumentation
- Mil/Aero communications /
optics / flight controls
Guidance, navigation, and
tracking
- Unmanned Vehicles
(UAV, etc)
- Personnel/instrument tracking
- Surgical navigation
- Factory automation
- Robotics
Instrumentation
- Avionics
- Attitude Heading and Reference
Systems
- Pointing/Tracking Devices
- General Motion Control
Features / Benefits
Access to up to 10 precision sensors from one interface
Sensor fusion discerns complex motion data (not
discernable by any one sensor alone)
330 Hz bandwidth (6x wider than competition) supports
multi-axis/sensor phase matching
Programmable internal filtering options
Digital self test
Embedded sensor condition monitoring/alarms
Smallest Industry Footprint, and Interface Compatibility
across family
Tactical grade bias stability (6 o/hr) enables GPS-aided
dead reckoning
Gyro continuous bias estimator
Magnetometer hard and soft iron calibration support
Barometer supports local or remote sensing
Supports direct interface with other system sensors
(GPS, optics). Also has an external clock sync option.
Adaptive Extended Kalman Filtering
0.1o (pitch/roll), 0.3o (yaw) accuracy; static
Configurable Event-Driven Controls
Programmable/Tunable to Application and Environment
Example Successful iSensor Implementations
Advances in Sensor Fusion, Integrated Sensor Processing, and Precision
Calibration, enabling widespread adoption in Industrial, Medical, and Military
Key specifications
Noise, Noise Density, Bandwidth
Noise
Density
ADIS16480/5/8
Noise reduction
from 0.022 to
0.0066°/sec/√Hz
Wider
bandwidth in
the inertial control
loop gain provides a
trade-off:
Speed
of response
Total noise
Additional
advantages
of wide-bandwidth:
Time-domain
noise Noise density
Noise bandwidth
noise 0 . 0066 1 . 57 * 50
noise 0 . 0066 1 . 57 * 50 0 . 058 / sec rms
matching
with multiple
sensors/axes
Improved control of
critical phase margin at
unity-gain bandwidth in
the control loop.
In-run bias stability
Cross-axis Sensitivity
Example #1 – Car-mounted antenna, camera, laser, etc.
Driving over a rough road can cause angular vibration (±10°/sec) in the y-axis (pitch).
High cross-axis sensitivity (GCAS) will cause angular jitter on the x-axis (roll).
ØROLL = 𝐆𝐂𝐀𝐒 x θPITCH = 0.09% x ±10°/sec = ±0.009 °/sec = roll axis jitter (ADIS164xx)
ØROLL = 𝐆𝐂𝐀𝐒 x θPITCH = 1% x ±10°/sec = ±0.2 °/sec = roll axis jitter (MEMSense)
Linear-g
Example #1 – Car-mounted antenna, camera, laser, etc.
Driving over a rough road can cause up/down vibration (±2g-rms) in the z-axis
High Linear-g sensitivity (GL) will cause angular jitter on all three gyroscopes.
ØROLL = 𝐆𝐋 x 𝐴𝑍= 0.009 x ±2g-rms = 0.018 °/sec = gyroscope noise (ADIS164xx)
ØROLL = 𝐆𝐂𝐀𝐒 x θPITCH = 0.1 x ±2g-rms = 0.2 °/sec gyroscope noise (MEMSense)
Application Example
Application Example:
Microwave antenna stabilization
Microwave communications can be on
aircraft, boats, ground-based vehicles,
and even in ground-anchored towers.
Key application-specific relationships to
start with:
Maximum data rates require optimal
received signal strength
Received signal strength depends on
optimal antenna alignment
Vibration, wind gusts, rough roads, rapid
maneuvers are all examples of things that
can impact antenna alignment.
Systems can use either electronic or
mechanical beam steering approaches
Two separate feedback loops:
Inertial (IMU)
Receive signal strength
Application Example:
Microwave antenna stabilization
Once the receiver and transmitter alignment are optimized, the two loops work
together to observe and correct for physical threats to optimal alignment.
Key physical parameter is angular jitter, which can reduce the overall power
received and force lower data rates in the transmission.
Since the IMU generates inertial feedback, noise in their output signals will
translate, directly into angular jitter on the stabilized platform.
IMU/Gyroscope parameters that directly impact jitter and will need consideration,
even if a competing device does not specify them:
Noise
Linear-g
Cross-axis sensitivity
Jitter
noise vibration cross axis
2
2
noise Noise density
2
Noise bandwidth
vibration Vibration linear g
cross axis Off axis rotation a sin( orthogonal
alignment
error )
Stabilization Systems
the bottom line…platform jitter
Putting it all together, we can see
how ADI IMUs stack up, when
combining all three behaviors in an
example application.
EXAMPLE CONDITIONS
Bandwidth @ -3dB (Hz)
Vibration (g-rms)
Off-axis rotation (°/sec)
BOTTOM LINE
Real applications require consideration of
linear and rotational motion in all 2-axes
ADI IMUs offer the best performance
and most complete disclosure of
performance expectation on the market.
50
4
30
Jitter
noise vibration cross axis
2
ADI
PERFORMANCE
Noise density (°g/sec/√Hz)
Linear-g (°/sec/g)
Cross-axis (%)
PROJECTED JITTER (°/sec)
ADIS16448
0.0135
0.015
0.09%
ADIS16485
0.0066
0.009
0.09%
Epson
S4E5A0A0
0.0053
0.05
0.17%
0.14
0.07
0.21
2
2
Competition
MemSense
H3-IMU
0.041
1.0%
SSS
DMU-02
0.011
0.1
3.0%
0.47
0.98
Epson does not offer a specification for the linear-g sensitivity. The 0.05 °/sec/g number is offered as a "whatif" example, to illustrate the impact. The other competitors are inferior, even without this consideration
The World Leader in High Performance Signal Processing Solutions
High Performance Focus:
Low Power
Prepared by Nitzan Gadish
For DFAE Training, June 2012
Barcelona, Spain
Agenda
The
four focus strategies of ADI MEMS group
Today: Focus on Low Power
ADXL362
Competitive Comparison
Where and How to Win: What We Do Differently
High Performance: Where all specs support
the highlight metric
“High-performance”
means that all critical performance
criteria are complementary, understood and communicated
clearly.
Current focus on 4 areas of high performance:
Stability
Vibration/Impact
Ultra Low Power
ADI MEMS & Sensor Technologies Focus
High Temp
Stability Focus: low noise, low tempco,
long life
ADXRS646
ADXRS203
Stability
family
Vibration/Impact
Ultra Low Power
High Temp
Vibration / Impact Focus
Vibration
Stability
Monitors for Predictive & Preventative Maintenance
Concussion
and other High Impact forces
ADXL377: 3-Axis High-g Analog-output MEMS Accelerometer
http://www.analog.com/adxl377/
Samples: X-Grade available. Release September 2012
Breakout boards available now
Stability
Vibration/Impact
Ultra Low Power
High Temp
High Temperature Focus
Stability
Guaranteed
Operation High Temperature MEMS Sensors for
Geological and Energy Exploration
ADXL206:
Precision, ±5g, Dual-Axis, High Temperature Analogoutput MEMS Accelerometer – http://www.analog.com/adxl206/
Production Status
Stability
Vibration/Impact
Ultra Low Power
High Temp
Introducing the New, MicroPower ADXL362
3 axes, digital output (SPI), ±2/4/8g measurement range
Industry’s
Lowest Power MEMS Accelerometer
< 2 µA at 100 Hz in Measurement Mode (VS = 2.5V)
300 nA in Wake-Up Mode
Enables
Intelligent, Continuously Operational Motion-activated Switch
Awake Status Pin Autonomously Triggers System Functions, Bypassing
Processor
Enhanced
Activity/Inactivity Detection
Multiple Sample Threshold Minimizes False Positive Motion Triggering
Inactivity Timer Up to 90 Minutes
Stability
Vibration/Impact
Ultra-Low Power
High Temp
Target: Apps that REALLY need low power.
Large quantities to replace
Battery Life of Years or
Expensive Truck roll to change
Remote or
Dangerous Locations
Ultra Low
Power
ADXL362
Financially impractical
to change batteries
Sealed Environment
Current Consumption
[µA]
How does it compare?
80
BMA250
70
LIS3DH Normal
Mode
60
50
40
30
20
10
0
0
100
200
300
Output Data Rate [Hz]
400
How does it compare?
Mode
or
ODR
Current Consumption [µA]
ADXL362
LIS3DH: Low
Power
LIS3DH: Normal
Mode
0.01
0.3
6 Hz
0.5
2
1 Hz
0.5
2
1 Hz
50 Hz
1.8
6
11
100 Hz
2.0
10
20
200 Hz
2.6
18
38
400 Hz
3.7
36
73
Standby
Wake Up
But wait… There’s more!
ADXL362
Common
Accelerometers
Important for…
6 Hz Wake-Up Mode
1 Hz sampling may
miss motions
Sensitive, low-power wake-up
10 nA Standby current
500 nA Standby current Applications where the xl is
mostly sleeping
AWAKE Status pin and
Autonomous Interrupt
Processing
Interrupt status only
and must be serviced
by host
Implementation of low-power
motion switch
Enhanced Activity
Detection: Multi-Sample
and Referenced
Single-sample, AC
Activity Detection can
miss desired motions
and falsely trigger
Robust yet sensitive: detects
even very subtle motion, only
when it should
Deeper FIFO: Up to 170
sample sets
32 sample sets FIFO
Further power savings OR
recording context around an
event
No Aliasing
Potential aliasing
Environments where vibration
is present
Feature: ALWAYS ON, ALL THE TIME
Micropower operation
means the accelerometer
can be the only thing
that’s on, and it can be on
all the time.
Also, the ADXL362 does not
power cycle its sensor
front end.
This is perfect for apps that
are motion-enabled and
XL362 is a motion switch
Continuous Operation +
Anti-Aliasing Filters =
Excellent Signal Integrity.
(Many accelerometers do this to
save power.)
Feature: 1 3 µA WAKEUP MODE
Some applications can
trade off continuous
sampling for even lower
power consumption.
The ADXL362 WAKEUP
MODE takes a single
acceleration sample ~6
times per second.
This sample is compared to
the ACTIVITY threshold to
determine whether the
device has moved.
Note that in this mode, the
output signal IS
susceptible to aliasing.
That’s ok in some
applications, like when
you’re just deciding
whether to wake
something up.
Feature: ULTRA-LOW STANDBY CURRENT
ADXL362 consumes
<2 µA when it’s on.
Its STANDBY current is
0.01 µA only.
That’s 10 nA.
By comparison, the
standby current of the
LIS3DH is 0.5 µA.
(It would be difficult to
build an accelerometer
that consumes 2 µA, if it
consumes 0.5 µA when
its circuits are shut off!)
Feature: PATENT-PENDING AWAKE
STATUS OUTPUT
AWAKE
bit indicates whether
the accelerometer is in motion
or at rest.
Map it to an INT pin for a status
output that is high when in
motion, low when at rest! (or
opposite)
Now, use it to switch power…
The ADXL362 as an Autonomous Motion
Switch
Current Flows
Full Operational
Current Flows
PRESENCE OF MOTION
System Power is CONNECTED
System Consumes Normal Current
Accelerometer Consumes <2µA
The ADXL362 as an Autonomous Motion
Switch
Current Flows
No Current
Zero
ABSENCE OF MOTION
System Power is DISCONNECTED
System Consumes 0 Power
Accelerometer Consumes <2µA
Feature: ENHANCED ACTIVITY DETECTION
Advantages
Multiple-sample detection instead of single threshold detect
- XL345, LIS3DH, MMA845x all have single threshold detect
- motion scrutiny, elimination of false positives for keeping
other components off
Referenced vs. AC
Inactivity extra-long timer
Feature: DEEP FIFO
ADXL362
LIS3DH
FIFO is 512 samples deep,
configured as one of:
170 sample sets of
{x, y, z} data,
OR
128 sample sets of
{x, y, z, temp} data
FIFO stores 32 sample sets
of {x, y, z} data.
Feature: DEEP FIFO
Common Uses
1.
Save power or unburden processor
Store 170 sample sets, then burst read them all (using only one
Read instruction!)
Accumulating data in the FIFO allows the microcontroller to stay
in Standby for a large portion of the time.
Or, if the micro is processing other things, the FIFO helps free it up.
Processor
Reading Data
Processor
Off / Free
Feature: DEEP FIFO
Advantages
Record context around a trigger event
2.
Without a FIFO, capturing samples prior to an event would
require continuous sampling and processing of acceleration
signals by the micro, significantly increasing battery life.
ADXL362 can record up to 15 seconds (170 sample sets at 12.5 Hz)
LIS3DH : <20% of that.
Example: Earthquake monitoring is an application that
greatly benefits from trigger mode.
Example: Some pacemaker applications considered our
deep FIFO to be very beneficial.
Feature: Ease of Programming
ADXL362
LIS3DH
Designed for easy
programming
• Registers in order of
startup sequence
• ACT and INACT available
simultaneously
• Entire FIFO contents can
be read with one
instruction
We tried this…
• Required finding the
application note
• Only one detection
function at a time (ACT or
INACT)
• Reading from FIFO
requires 1 instruction per
sample
Background: firmware examples implementing the same function on the two devices.
Support: www.analog.com/memseval
Support: 3 Evaluation Options
Standard
Breakout Board
Small,
simple
Best for integrating into existing system
Low-Power
Evaluation System
Motherboard
and Satellite Board
View Real-Time data, current consumption
Development
Operates
Board: Highlights Low Power
on a coin cell
Renesas Ultra-Low Power Microcontroller
EInk display (“electronic paper technology”)
Implements a few examples. Reprogrammable
Program, disconnect, record data, transfer data, analysis
Support:
ez.analog.com/community/MEMS
Design Integration: Circuits from the Lab
CN-0274: Autonomous Motion Switch
Circuits
from the Lab article implements the Motion Switch on
an SDP-compatible platform.
Design Integration: Getting Started
ADXL362
product webpage at http://www.analog.com/adxl362
will provide:
Schematic
and Layout Files for all Evaluation Boards
Renesas tools
Configuration Tool
C header (starting point)
Linux drivers
Arduino library
PMOD
What else would be helpful?
Well… What are you waiting for??
Part
numbers for orders:
ADXL362XCCZ
Currently X-grade. Final release late summer
EVAL-ADXL362Z : Breakout Board, available now
EVAL-ADXL362Z-DB : Development Board, expected July
EVAL-ADXL362Z-MLP : Evaluation System, available now
The World Leader in High Performance Signal Processing Solutions
Analog Devices MEMS Microphone
Technology & Overview
MEMS Microphone Topics
ADI
MEMS Microphone Market Analysis & Target
markets
Application Examples
Describe advantages of MEMS over ECMs
Specific Advantages of ADI MEMS Mics over
competitors
Why is SNR critical for today’s applications?
MEMS Microphone portfolio
Design Support Tools
Total Available Microphone Market - TAM
(Millions Units)
“Performance”
Source: iSuppli, ADI estimates
Target Industrial & Instrumentation Markets
Security
Building Mgmt
IP Security Cameras
Glass Break Detection
Alarm Access Panels
Public Safety / Military
Fire & Safety Radios
Sports Performance Monitoring
Military / Pilot Helmet
Machine Health
Fault Detection or
Flow Monitoring
Enhanced Motion Sensor
Light Switch
Concussion Analysis
Ruggedized
Industrial Computing
Athlete Health Monitoring
White Goods
Washers / Cookers
“Pro-sumer” Consumer Electronics
Enhancing the User Experience
ADI
MEMS Microphones are a good fit for high-end audio
capture applications
ADI
is bridging the gap between commodity MEMS (i.e., in cell
phones / tablets) and other markets with higher acoustic
performance
Conference
Phones, Studio Mics, DSLR cameras, etc.
Differentiated
from their low-end counterparts
Applications:
IP Security Cameras
What
is the application?
Audio capture for security cameras
Why
ADI MEMS Mics?
High SNR
Enables cameras to pick up sounds from long distances
Reliability
Signal Chain integration
2
Microphones are available with analog, PDM, or I S outputs
Best-fit
parts – depends on camera chipset’s audio interface
ADMP504
Analog output
65 dB SNR
ADMP521
PDM output
65 dB SNR
Applications :
Teleconference Systems
What
is the application?
Wireless microphones for conference rooms
Why
ADI MEMS Mics?
High SNR
Enables cameras to pick up sounds from
long distances
Signal Chain integration
I2S output allows microphone to be directly connected to digital transmitter
No ADC or codec needed!
Best-fit
part
ADMP441
2
I S output
61 dB SNR
Applications :
Agricultural Seeding Monitor
What
is the application?
Monitoring seed tubes to detect blockages
Why
ADI MEMS Mics?
Small size
Multiple microphones can be mounted close to seeding tubes
Advantages of acoustic sensing
More reliable than optical sensors
Fewer wires to connect to control panel
Reliability
Low vibration sensitivity
Stable response across temperature
Best-fit
parts
ADMP401,
ADMP404
Analog output
62 dB SNR
MEMS VS. ECM
Microphone Technology Trends Towards MEMS
ECM
JFET
MEMS
MEMS
Analog Output
Digital Output
Performance is unaffected by Pb free solder reflow temperature
Replaces high cost manual sorting & assembly w/ automated assembly
Higher SNR and superior matching
Higher mechanical shock resistance
Wider operating temperature range
Consumes less current
Superior performance part-to-part, over temperature, and with vibration
Why use MEMS Microphones?
1. Performance Density
70dB
MEMS
Microphones
MEMS Mics shifts the SNRto-volume slope up
dramatically!
SN
R
Electret
Microphones
55dB
10m
m3
100
200
300
400
500
600
700
Microphone Physical Volume (cubic millimeters)
Electret
mics performance degrades dramatically in smaller
packages
MEMS raises the bar to a new level of performance in the
same volume as the smallest electrets!
Why use MEMS Microphones?
2. Less Sensitivity variation vs. temperature
ECM vs. ADMP441
Deviation from the
original sensitivity
Why use MEMS Microphones?
3. Handles Vibration better than ECMs
MEMS
Lower
MEMS
diaphragm mass (thinner) for MEMS Mic results in
lower vibration sensitivity
ADI MEMS microphones have at least 12 dB lower vibration
sensitivity than ECMs
Why use MEMS Microphones?
9
9
6
6
3
3
0
0
-3
dB
dB
4. Uniform Part to Part Frequency Response
-6
-6
ECM 1
(Ø6 x 3.4 mm)
-9
-12
-3
ECM 2
(Ø3 x 1.5 mm)
-9
-12
-15
100
1,000
Frequency, Hz
-15
10,000
100
1,000
Frequency, Hz
10,000
9
6
The ADI MEMS Mics respond
nearly identically!
5
3
dB
dB
0
-3
-5
-6
ADMP421
(3 x 4 x 1 mm)
ECM 3
(Ø9.7 x 5 mm)
-9
-12
-15
-15
100
1,000
Frequency, Hz
10,000
100
1,000
Frequency, Hz
10,000
ADI MEMS MIC
ADVANTAGES
Why use ADI MEMS Microphones?
Full System Solution – ADI ASIC and ADI MEMS
MEMS Element
Common Substrate
Surface Mount Packages
Analog or Digital ASIC
Top Port versus Bottom Port: Performance Impact
Bottom Port Provides Superior SNR & Frequency Response
All top-port microphones (MEMS and ECM) currently on the market have sharp peaks
in their high-frequency response, making them unacceptable for wideband voice
applications
All top-port microphones have low SNR (55…58 dB)
There are no top-port microphones with high performance currently on the market
ADI Bottom-Port MEMS Microphone
70
Competitor Top-Port MEMS Microphone
Why is SNR critical for today’s electronics?
For close talking
an Omnidirectional
microphone is
adequate
Signal Level
Effective Signal to Noise Ratio
1” 85dB
8” 69dB
46dB
30dB
At distance the signal level is
low with reference to
background
noise - Need
16” 63dB
32” 57dB
directionality
24dB
18dB
Noise Floor 39dB
(55dB SNR Mic)
24dB
Noise Floor 33dB
(61dB SNR Mic)
Noise Floor 29dB
(65dB SNR Mic)
28dB
MEMS MIC PORTFOLIO
ADI MEMS Microphone Portfolio
High Performance MEMS Microphones: All Fully Released!
Package
Most integrated
microphone
available!
ADMP401
100 Hz to 15 kHz Flat
Frequency Response
ADMP441
Full I2S-Output
4.72x3.76x1
mm
ADMP521
ADMP421
4x3x1
mm
ADMP504
ADMP405
3.35x2.6x0.88 mm
62dB SNR
200 Hz to 15 kHz Flat
Frequency
Response
65dB SNR Family
62dB SNR Family
61dB SNR
Pulse Density
Modulated (PDM)
Output
65dB SNR
Pulse Density
Modulated (PDM)
Output
65dB SNR
100 Hz to 15kHz
Frequency Response
ADMP404
62dB SNR
100 Hz to 15 kHz Flat
Frequency
Response
Analog Output
Flexibility in Signal Acquisition
Digital Output
Higher Integration
ADMP504: High SNR, Analog-Output Mic
Industry-leading noise floor for MEMS Microphones
Benefits
Features
• High SNR of 65 dB (A-weighted) – capable of
equivalent input noise of 29 dB SPL
• Dynamic Range of 91 dB
• Sensitivity of -38 dBV
• Analog Output
• Package size 3.35 x 2.5 x 0.88mm
• Same package as ADMP404
• Extended frequency response from 100 Hz - 20
kHz
• Low current consumption: 180 μA (typ)
•
•
•
•
•
•
• Provides easy upgrade path to higher SNR
• Well-balanced, natural sound from microphone
• Long battery-life for mobile devices
Mobile Devices
Building Automation
Security Systems
Conferencing Systems
Gaming Consoles
Tablet PCs
Flex-mounted device: EVAL-ADMP504Z-FLEX
MICBIAS
0.1µF
VDD
ADMP504
OUTPUT
GND
2.2µF
MINIMUM
ADAU1761
OR
ADAU1361
LINN
LINP
CM
Surface Mount Package
3.35 mm x 2.5 mm x 0.88mm
(bottom side shown)
ADMP504 example application
with ADI SigmaDSP codec
10140-007
Applications
• Ideal for far-field applications – would require 2
or more 61 dB mics in an array for similar SNR!
• Captures very loud and very soft noises
• Optimum sensitivity level for standard codecs
• Ideal for use with an integrated codec or with
optimization via selection of discrete amps or
ADCs
• Small package for space constrained
applications
ADMP521: High SNR, Digital-output Mic
Industry-leading noise floor for MEMS Microphones
Benefits
Features
• High SNR of 65 dB (A-weighted) – capable of an
equivalent input noise level of 29 dB
• Dynamic Range of 91 dB
• Sensitivity of -26 dBFS
• Pulse data modulated (PDM) output
• Package size 3x4x1 mm
• Flat frequency response from 100 Hz to 20 KHz
• Current consumption: 900 μA in operation –
less than 1 μA in sleep mode!
• High PSR of -80 dBFS
Applications
•
•
•
•
•
• Ideal for far-field applications – would require 2 or
more 61 dB mics in an array for similar SNR!
• Captures both very loud and very soft sounds
• Digital output mics provide highest sensitivity
possible
• Widely-used single-bit bus for codecs
• Small package for space constrained applications
– and pin-to-pin upgradeable from the ADMP421
• Ideal for HD audio capture
• Supports very long battery-life for mobile devices
• Provides flexibility in trace routing
Security Systems
Teleconferencing Systems
Gaming Consoles
Mobile Devices
Tablet PCs
Full Evaluation Board: EVAL-ADMP521Z
Flex-mounted device: EVAL-ADMP521Z-FLEX
Surface Mount Package
4 mm x 3 mm x 1mm
(bottom side shown)
ADMP441: I2S-output Digital Microphone
MEMS device with integrated ASIC provides complete signal chain!
Features
• High SNR of 61 dB (A-weighted), capable of
Equivalent Input Noise (EIN) of 33 dB SPL
• Integrates full signal chain – preamp and
ADC
• I2S output with high precision 24-bit data
• Flat frequency response from 60 Hz to 15
kHz
• Low current consumption –1.4 mA (typ)
• High PSR of -75 dBFS
Benefits
• Provides excellent sound quality and is ideal
for far-field applications
• Saves cost, space and design complexity
• Supports direct interface with microcontroller
or DSP
• Well-balanced, natural sound from microphone
• Long battery-life for mobile devices
• Provides flexibility in trace routing
Applications
•
•
•
•
•
•
Security Systems
Teleconferencing Systems
Remote Microphones
Gaming Consoles
Mobile Devices
Tablet PCs
Surface Mount Package
4.72mm x 3.76mm x 1mm
Evaluation Boards:
EVAL-ADMP441Z-FLEX (ADMP441 on flex)
EVAL-ADMP441Z (optional board for connecting flex to PC USB port)
Industry’s Most Integrated MEMS Mic
ADMP441 integrates more of the signal chain than any other MEMS Mic!
Typical Analog-output mics (like the ADMP504/404) integrate an output amp
Typical “digital-output” mics (like the ADMP421) integrate an ADC and
provide a single bit output stream (known as “pulse density modulation” or
PDM) – which still requires a filter and some signal processing
And PDM codecs are relatively focused on mobile devices – PDM is not
widespread outside this end equipment yet
ADMP441 provides full I2S output – the most common digital audio interface
Integration provided only by the
ADMP441!
Secondary
Amplifier
Serializer
I2S, etc.
Filte
r
ADMP504
ADMP421
ADMP441
Digital Signal
Processor or
Microcontroller
MEMS MICROPHONE
DESIGN SUPPORT
MEMS Microphone Design-In Support
www.analog.com/mic
Application Notes
Technical Articles
AN-1112: Microphone Common Terms & Specs explained
AN-1003: Recommendations for Mounting & Connecting ADI Bottom-port
Microphones
AN-1068: Reflow Soldering of MEMS Microphones
AN-1124: Recommendations for sealing ADI bottom-port Mics from Dust & Liquid
Ingress
AN-1140: Microphone Array Beamforming
“Understanding Microphone Sensitivity”, Analog Dialogue, May 2012
Microphone sensitivity can be a confusing spec. This article explains what you and our
customers need to know to compare mics with different sensitivities.
“Common Inter-IC Digital Interfaces for Audio Data Transfer”
Differences between and applications for I2S, PDM, TDM formats
Website:
FAQs
Webinars and other videos
MEMS Microphone Design-In Support
MEMS Microphone Evaluation Boards
All Mics available as eval boards mounted on flex
Ideal for customers to just wire in mic into their current system for eval
Some mics are also available on PCBs to easily interface to other ADI eval boards
Audio Codecs & Processors
Blackfin SDP
Circuits
from the Lab
Ideal for highlighting integration and performance capabilities
CN-0078: PDM digital microphone + SigmaDSP audio codec
CN-0207: Analog microphone + SigmaDSP audio codec
CN-0208: I2S digital microphone + SigmaDSP processor
CN-0262: Analog microphone + microphone preamp
CN-0266: I2S digital microphone + Blackfin DSP
New EngineerZone Audio Community
ez.analog.com/community/audio
MEMS
Microphones included in the
Audio community on EngineerZone
Launched in May
Includes all audio products &
applications
MEMS Microphones
Audio converters, codecs
DSPs
Audio Amplifiers
the Expert – “Designing with
MEMS Microphones”
Ask
Key MEMS microphone design questions
& answers
Archived at:
http://ez.analog.com/community/ask_the
_expert/archived/mems-microphones
Microphone Contact Information
Microphone
Product Line
Marketing
Paul Schreier
Paul.schreier@analog.com
Telephone: +1 (781) 937-1122
Microphone
Product Line
Applications
Jerad Lewis
Jerad.lewis@analog.com
Telephone: +1 (781) 937-1601
Microphone
Samples
All
released products are
sample-able via the web
All products available in 1k
and 4.5k / 5k reels
For odd quantities (100, 200
pieces, etc.), catalog
distributors (Digi-Key, etc.)
have these products in stock
Microphone
Eval Board
Orders
Available on ADI eStore
All boards are in stock and
available
MEMS MICROPHONE
APPENDIX