design of pid controllers for plants with underdamped step response

National Taiwan Ocean University
Department of Communications, Navigation and
Control Engineering
Design of PI and PID Controllers With
Transient Performance Specification
J.C.Basilio and S.R.Matos
Professor : 曾慶耀
Speaker
:鄭凱仁
ID
:
10067019
Date
:
11/17/2011
Outline
• Introduction
• DESIGN OF PI AND PID CONTROLLERS FOR PLANTS WITH
MONOTONIC STEP RESPONSE
A. Design of a PI Controller
B. Design of a PID Controller
C. Example
• DESIGN OF PID CONTROLLERS FOR PLANTS WITH
UNDERDAMPED STEP RESPONSE
A. Example
• Conclusions
Introduction
• PID controllers are widely used in industrial control systems because of the reduced number of parameters to be tuned.
The most popular design technique is the Ziegler–Nichols method
• Ziegler–Nichols method , besides being suitable only for systems with monotonic step response , the compensated systems whose controllers are tuned in accordance with the
Ziegler–Nichols method have generally a step response with a high-percent overshoot
• In this paper, tuning methods for proposed :
I. DESIGN OF PI AND PID CONTROLLERS FOR PLANTS WITH
MONOTONIC STEP RESPONSE
II. DESIGN OF PID CONTROLLERS FOR PLANTS WITH
UNDERDAMPED STEP RESPONSE
Introduction
The corresponding transfer function is given as
The main features of PID controllers are the capacity to eliminate steady-state error of the response to a step reference signal (integral action) and the capacity to transient stability(derivative).
Introduction
The parameter setting, according to the Ziegler –Nichols method, is carried out in four steps.
DESIGN OF PI AND PID CONTROLLERS FOR PLANTS WITH
MONOTONIC STEP RESPONSE
The parameter K can be computed as follows
DESIGN OF PI AND PID CONTROLLERS FOR PLANTS WITH
MONOTONIC STEP RESPONSE one case see that for an ideal, critically damped second-order system with transfer function (3) , the response to a step with amplitude A , as follows:
DESIGN OF PI AND PID CONTROLLERS FOR PLANTS WITH
MONOTONIC STEP RESPONSE
A. Design of a PI Controller
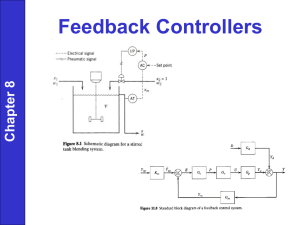
Consider the feedback system of Fig. 3
DESIGN OF PI AND PID CONTROLLERS FOR PLANTS WITH
MONOTONIC STEP RESPONSE
Namely,
,the feedback system will be critically damped system will be underdamped (overdamped).
DESIGN OF PI AND PID CONTROLLERS FOR PLANTS WITH
MONOTONIC STEP RESPONSE by replacing in the expression for the percent overshoot of a second-order system
DESIGN OF PI AND PID CONTROLLERS FOR PLANTS WITH
MONOTONIC STEP RESPONSE for a system with a monotonic step response can be carried out according to the following algorithm:
DESIGN OF PI AND PID CONTROLLERS FOR PLANTS WITH
MONOTONIC STEP RESPONSE
B. Design of a PID Controller
It should be noted that since the open-loop transfer function:
DESIGN OF PI AND PID CONTROLLERS FOR PLANTS WITH
MONOTONIC STEP RESPONSE
DESIGN OF PI AND PID CONTROLLERS FOR PLANTS WITH
MONOTONIC STEP RESPONSE
DESIGN OF PI AND PID CONTROLLERS FOR PLANTS WITH
MONOTONIC STEP RESPONSE
DESIGN OF PI AND PID CONTROLLERS FOR PLANTS WITH
MONOTONIC STEP RESPONSE
Therefore, the tune of a PID controller for a plant with montonic step response can be carried out as follows:
DESIGN OF PI AND PID CONTROLLERS FOR PLANTS WITH
MONOTONIC STEP RESPONSE
C. Example illustrated by the design of PI and PID controllers for the following :
DESIGN OF PI AND PID CONTROLLERS FOR PLANTS WITH
MONOTONIC STEP RESPONSE
DESIGN OF PI AND PID CONTROLLERS FOR PLANTS WITH
MONOTONIC STEP RESPONSE
DESIGN OF PI AND PID CONTROLLERS FOR PLANTS WITH
MONOTONIC STEP RESPONSE
DESIGN OF PID CONTROLLERS FOR PLANTS WITH
UNDERDAMPED STEP RESPONSE
Systems with underdamped step response may be approximated by a second-order system with the transfer function
For an ideal second-order system with transfer function (11), the response to a step input with amplitude A is given as
DESIGN OF PID CONTROLLERS FOR PLANTS WITH
UNDERDAMPED STEP RESPONSE the damping coefficient and the natural frequency can be determined as follows
DESIGN OF PID CONTROLLERS FOR PLANTS WITH
UNDERDAMPED STEP RESPONSE can be rewritten as
Since system (11) has a pair of complex poles, namely a natural choice for the controller zeros would be such that the numerator polynomial of K(s) and the denominator polynomial of G(s) cancel. In order for this condition to happen, must satisfy
DESIGN OF PID CONTROLLERS FOR PLANTS WITH
UNDERDAMPED STEP RESPONSE
The relationship between the settling time and the time constant of a first-order system is therefore, for a given settling time , the controller gain should be adjusted to
DESIGN OF PID CONTROLLERS FOR PLANTS WITH
UNDERDAMPED STEP RESPONSE
The results of this section can be summarized in the following algorithm:
DESIGN OF PID CONTROLLERS FOR PLANTS WITH
UNDERDAMPED STEP RESPONSE
A. Example transfer function
For this plant, the unit-step response is shown in Fig. 11, from which it is possible to verify that
DESIGN OF PID CONTROLLERS FOR PLANTS WITH
UNDERDAMPED STEP RESPONSE
DESIGN OF PID CONTROLLERS FOR PLANTS WITH
UNDERDAMPED STEP RESPONSE
Conclusions
• Ziegler–Nichols method, has good disturbance rejection , but they are based on the plant step response, generally a step response with a high-percent overshoot.
• In this paper, provide systematic means to adjust the proportional gain in order to have no overshoot on the closedloop step response.
• PID controllers can be designed for plants with underdamped step response.
• since the proposed methodology is based on root-locus diagrams and, therefore, can be used in an undergraduate control course