Laplace Transforms
advertisement

Chapter 12
EGR 272 – Circuit Theory II
Read: Ch. 12 in Electric Circuits, 9th Edition by Nilsson
Handout: Laplace Transform Properties and Common Laplace Transforms
Laplace Transforms – an extremely important topic in EE!
Key Uses of Laplace Transforms:
• Solving differential equations
• Analyzing circuits in the s-domain
• Transfer functions
• Frequency response
• Applications in many courses
Courses Using Laplace Transforms:
• Circuit Theory II
• Electronics
• Control Theory
• Discrete Time Systems (z-transforms)
• Communications
• Others
Testing:
Some calculators can often be used to find Laplace transforms and inverse
Laplace transforms. However, it is also easy to make mistakes with the
calculators and if the student is not familiar with the material, the mistakes
might easily go undetected. As a result: No calculators allowed on Test #3
1
Chapter 12
EGR 272 – Circuit Theory II
2
Notation:
F(s) = L{f(t)} = the Laplace transform of f(t).
f(t) = L-1{F(s)} = the inverse Laplace transform of F(s).
Uniqueness: Every f(t) has a unique F(s) and every F(s) has a unique f(t).
L
f(t)
F(s)
L -1
Note:
Transferring to the s-domain when using Laplace transforms is similar to
transferring to the phasor domain for AC circuit analysis.
Chapter 12
EGR 272 – Circuit Theory II
3
Definition:
F(s)
f(t)e dt
-st
(one-sided Laplace transform)
0
where
s = + jw = complex frequency
= Re[s] and w = Im[s]
sometimes complex frequency values are displayed on the s-plane as
follows:
jw
s-plane
Note: The s-plane is sometimes
used to plot the roots of systems,
determine system stability, and
more. It is used routinely in later
courses, such as Control Theory.
Chapter 12
EGR 272 – Circuit Theory II
Convergence: A negative exponent (real part) is required within the integral
definition of the Laplace Transform for it to converge, so Laplace Transforms
are often defined over a specific range (such as for > 0). Convergence will
discussed in the first couple of examples in this course to illustrate the point,
but will not be stressed afterwards as convergence is not typically a problem in
circuits problems.
Determining Laplace Transforms - Laplace transforms can be found by:
1) Definition - use the integral definition of the Laplace transform
2) Tables - tables of Laplace transforms are common in engineering and math
texts. The table on the following page will be provided on tests.
3) Using properties of Laplace transforms - if the Laplace transforms of a few
basic functions are known, properties of Laplace transforms can be used to
find the Laplace transforms of more complex functions.
4
Chapter 12
EGR 272 – Circuit Theory II
5
Table of Laplace Transforms
(to be provided on tests)
Chapter 12
EGR 272 – Circuit Theory II
Example: If f(t) = u(t), find F(s) using the definition of the Laplace
transform. List the range over which the transform is defined
(converges).
Example: If f(t) = e-at u(t), find F(s) using the definition of the Laplace
transform. List the range over which the transform is defined
(converges).
6
Chapter 12
EGR 272 – Circuit Theory II
Example: Find F(s) if f(t) = cos(wot)u(t)
(Hint: use Euler’s Identity)
7
E uler's Identities
e
jx
= cos(x) jsin(x)
cos(x) =
e
+ jx
+ e
-jx
2
sin(x) =
e
+ jx
-e
2j
Example: Find F(s) if f(t) = sin(wot)u(t)
-jx
Chapter 12
EGR 272 – Circuit Theory II
8
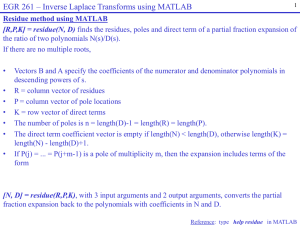
Laplace Transform Properties
Laplace transforms of complicated functions may be found by using known
transforms of simple functions and then by applying properties in order to see
the effect on the Laplace transform due to some modification to the time
function. Ten properties will be discussed as shown below.
Table of Laplace Transform Properties (will be provided on tests)
1
L inearity
L {af(t)} = aF (s)
2
S uperposition
L {f 1 (t) + f 2 (t) } = F 1 (s) + F 2 (s)
3
M odulation
L {e f(t)} = F (s + a)
4
T im e-S hifting
L {f(t - )u(t - )} = e F (s)
5
S caling
L f(at)
6
R eal D ifferentiation
L
7
R eal Integration
L
8
C om plex D ifferentiation
L
9
10
C om plex Integration
C onvolution
-at
-s
L
s
F
a a
1
d
f(t) sF (s) - f(0 )
dt
t
1
f(t)d t F (s)
0
s
d
tf(t) F (s)
ds
f(t)
t
F (s)d s
s
L {f(t) * g(t)} = F (s)· G (s)
Chapter 12
EGR 272 – Circuit Theory II
Laplace Transform Properties:
1. Linearity: L {af(t)} = aF(s)
L {f1(t) + f2(t) } = F1(s) + F2(s)
2. Superposition:
Example: Use the results of the last two examples plus the two properties
above to find F(s) if f(t) = 25(1 – e-3t )u(t)
9
Chapter 12
EGR 272 – Circuit Theory II
10
Laplace Transform Properties: (continued)
3. Modulation: L {e-atf(t)} = F(s + a)
This means that if you
know F(s) for any f(t), then
the result of multiplying f(t)
by e-at is that you replace
each s in F(s) by s+a.
Example: Find V(s) if v(t) = 10e-2t cos(3t)u(t)
Solution
:
L 10cos(3t)u (t)
L 10e
- 2t
10s
s 3
2
cos(3t)u(t )
(known tra
2
10 s 2
s 2
2
9
nsform from table)
(modulatio
n)
This solution shows
a good way to use
Laplace transform
properties:
1) Begin with a
known transform
2) Apply property
3) Apply property
4) Etc
Chapter 12
EGR 272 – Circuit Theory II
Example: Find I(s) if i(t) = 4e-20t sin(7t)u(t)
11
Chapter 12
EGR 272 – Circuit Theory II
Laplace Transform Properties: (continued)
4. Time-Shifting: L {f(t - )u(t - )} = e-sF(s)
Example: Find L {4e-2(t - 3) u(t - 3)}
Example: Find L {10e-2(t - 4)sin(4[t - 4])u(t - 4)}
12
Note: Be sure that all
t’s are in the (t - ) form
when using this
property.
Chapter 12
EGR 272 – Circuit Theory II
13
Note: Properties can sometimes be applied in different orders. However, one
of the methods may be easier. Practice helps in deciding which method to use.
Example: Find F(s) if f(t) = 4e-3t u(t - 5) using 2 approaches:
A) By applying modulation and then time-shifting
B) By applying time-shifting and then modulation
Chapter 12
EGR 272 – Circuit Theory II
Example: Find L {4e-3tcos(4[t - 6])u(t - 6)}
14
Chapter 12
EGR 272 – Circuit Theory II
15
Laplace Transform Properties: (continued)
In other words, the result of
5. Scaling:
1 s
L
f(at)
F
a a
Note: This is not a commonly
used property.
Example: Find F(s) if f(t) = 12cos(3t)u(t)
replacing each (t) in a function with
(at) is that each s in the transform is
replaced by s/a and the transform is
also divided by a.
Chapter 12
EGR 272 – Circuit Theory II
Laplace Transform Properties: (continued)
6. Real (Time) Differentiation:
d
L f(t) sF(s) - f(0)
dt
Example: Find L {f ’(t)}
Example: Find L {f ’’(t)}
Example: Find L {f ’’(t)}
Example: Find L {f n(t)}
16
Chapter 12
EGR 272 – Circuit Theory II
Example: Find the Laplace transform of the familiar relationship:
i(t) C
dv
dt
7. Real (Time) Integration:
Example: Find
t
1
L f(t)dt F(s)
0
s
t t
L f(t)d td t
0 0
17
Chapter 12
EGR 272 – Circuit Theory II
Example: Find the Laplace transform of the familiar relationship:
v(t)
1
t
i(t)dt
C
0
v(0)
18
Chapter 12
EGR 272 – Circuit Theory II
19
Laplace Transform Properties: (continued)
8. Complex Differentiation:
d
L
Example: Find L {tu(t)}
Example: Find L {t2 u(t)}
Example: Find L {t3 u(t)}
Example: Find L {t n u(t)}
tf(t)
ds
F(s)
Chapter 12
EGR 272 – Circuit Theory II
Example: Find L {3te-2t cos(4t)u(t)}
Example: Find L {tu(t - 2)}
20
Chapter 12
EGR 272 – Circuit Theory II
Laplace Transform Properties: (continued)
9. Complex Integration:
f(t)
L
t
1
Example: Find L u (t)
t
F (s)d s
s
21
Note: This is not a
commonly used property.
Multiplying by t is common
(such a with repeated
roots), but dividing by t is
rare.
Chapter 12
EGR 272 – Circuit Theory II
22
Laplace Transform Properties: (continued)
10. Convolution: L {f(t) * g(t)} = F(s)·G(s)
f(t) * g(t) reads as “f(t) convolved with g(t)”
Convolution is defined by the difficult integral relationship shown below.
Evaluating this integral is covered in a later course.
t
f(t) * g(t)
g( )f(t - )d
0
Laplace transforms are often used to bypass the convolution integral (illustrated
on the following page). Since L {f(t) * g(t)} = F(s) G(s) we can determine
f(t)*g(t) using
f(t)*g(t) = L -1 {F(s)G(s)}
Chapter 12
EGR 272 – Circuit Theory II
23
The method of using Laplace transforms to bypass the convolution integral is
illustrated by the diagram below.
t
f(t) * g(t)
Evaluate
difficult
convolution
integral
Given:
f(t), g(t)
g( )f(t - )d
0
f(t)*g(t) = L -1 {F(s)G(s)}
Find:
f(t)*g(t) = ?
Take
Laplace
Transform
F(s), G(s)
F(s)·G(s)
Multiply
Take
Inverse
Laplace
Transform
Chapter 12
EGR 272 – Circuit Theory II
Example: If f(t) = 2e-2tu(t) and g(t) = 4e-3tu(t), find f(t)*g(t) using
Laplace transforms.
24
EGR 272 – Circuit Theory II
Chapter 12
25
Impulse Function
(t) 0 for t 0
(t) = impulse function
The impulse function is defined as: (t)dt 1 (i.e., the area equals 1)
-
Delta functions are often illustrated as shown below.
(t)
2(t-4)
Area = 1 (not
height)
0
t
Area = 2 (not
height)
0
4
t
f(t)
Illustration
To illustrate the concept that the
area under (t) = 1 (not the
height =1), consider the function
f(t) shown below:
1 /A
(t)
lim
A0
t
-A/2
0
+ A/2
f(t)
Chapter 12
EGR 272 – Circuit Theory II
26
Example: When do impulse functions occur? Consider the example shown
below. Sketch the capacitor current.
+
v(t)
-
v(t)
i(t)
C
t
i(t)
t
Chapter 12
EGR 272 – Circuit Theory II
27
Laplace Transform of an impulse function
The Laplace transform of an impulse function can be found using the definition
of the Laplace transform:
L (t) (t)e
- st
dt
0
Since (t) only exits at t=0, e-st only needs to be evaluated at t = 0 (this
is sometimes called the sifting property), so:
L (t) (t)e dt (t)dt 1
0
0
so
L {(t)} = 1
0
Chapter 12
EGR 272 – Circuit Theory II
28
Impulse functions can occur in real circuits. Constant terms in F(s) will
correspond to impulse functions in f(t). We will soon see that if the order of
N(s) is not less than the order of D(s), we should begin by using long division
before finding an inverse Laplace transform.
Example: Find f(t) for F(s) shown below. (Hint: Order of N(s) = 2 and order
of D(s) = 2, so begin with long division)
2s 6
2
F(s)
s 6s 25
2
Chapter 12
EGR 272 – Circuit Theory II
Laplace Transforms of waveforms
Piecewise-continuous waveforms can be expressed using unit functions.
Laplace transforms of these expressions can then be found.
Example: Find F(s) for f(t) shown below.
f(t)
6
t
0
2
4
Example: Find F(s) for f(t) shown below.
f(t)
12
t
0
4
29