Unit 3 PowerPoint Slides
advertisement

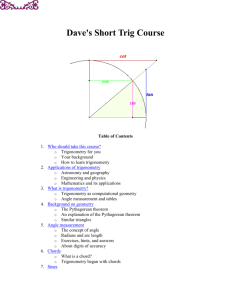
EGR 1101 Unit 3 Lecture #1 Trigonometry in Engineering: One-Link Planar Robot (Sections 3.1, 3.2 of Rattan/Klingbeil text) Mathematical Review • • • Trigonometry is the branch of mathematics dealing with relationships among the angles and sides of triangles. Has many practical applications, and will appear many times in your engineering courses. You should be familiar with everything on the Trig reference sheet on the website. A Many-Link Robot Arm • See photo at top of Wikipedia’s page on trigonometry: http://en.wikipedia.org/wiki/Trigonometry Today’s Examples 1. Given a one-link planar robot’s arm length and angle, find endpoint coordinates. 2. Given a one-link planar robot’s endpoint coordinates, find arm length and angle. An Algebraic Identity • For any nonzero real number x, 1 x x x • Example: Where the book uses I prefer to use 2 2 1 2 . Trig Functions on Your Calculator • • Scientific calculators can compute sines, cosines, and tangents of angles. To get good answers, you must pay attention to whether the calculator is in degrees mode or radians mode. Trig Functions in MATLAB If your angle is in radians: • – – – sin() cos() tan() If your angle is in degrees: • – – – sind() cosd() tand() Inverse Trig Functions on Your Calculator • • • Scientific calculators can compute inverse sines, inverse cosines, and inverse tangents. To get good answers, you must pay attention to whether the calculator is in degrees mode or radians mode. You must also be aware that the calculator’s answer may be in the wrong quadrant, and that you may need to adjust the answer. Inverse Trig Functions in MATLAB • These give answer in radians: – – – • These give answer in degrees: – – – • asin(n) acos(n) atan(n) asind(n) acosd(n) atand(n) Four-quadrant arctangent: atan2(y,x) EGR 1101 Unit 3 Lecture #2 Trigonometry in Engineering: Two-Link Planar Robot (Section 3.3 of Rattan/Klingbeil text) Today’s Examples 1. Given a two-link robot’s arm lengths and angles, find endpoint coordinates. 2. Given a two-link robot’s arm lengths and endpoint coordinates, find angles. Review: Law of Cosines • In any triangle: c2 = a2 + b2 – 2ab cos • Also, a2 = b2 + c2 – 2bc cos b2 = a2 + c2 – 2ac cos Review: Law of Sines • In any triangle: