סקר ספרות ורקע תיאורטי (המשך)
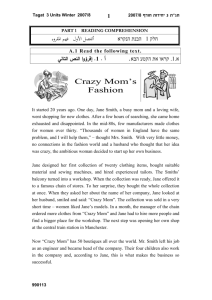
advertisement
")
הטכניון – מכון טכנולוגי לישראל המחלקה להוראת הטכנולוגיה והמדעים מאפיינים של למידת מנגנונים מכאניים מבוקרי מחשב בסביבה מעבדתית משותפת לתלמידים וסטודנטים בטכניון דוקטורנט :יבגני קורצ'נוי מנחה :דר' איגור ורנר הסמינר המחלקתי – 2006 מבוא רובוטיקה זו תחום מתפתח שיכול באופן משמעותי להשפיע על טבעם של חינוך הנדסי ומדעי בכל הרמות מגן ילדים ועד לימודי מוסמכים .כעת תעשיה צבעית ואזרחית מעוניינת ביישום רחב של רובוטים ,ולימודי רובוטיקה נחשבים כדרך יעילה להכשרת כוח אדם .למגוון של תוכניות לימודים ברובוטיקה יש תכונות משותפות ,הן בינתחומיות ,מכילות ניסויי מעבדה ,התנסות מעשית, ומתמקדות בפרויקטים לפיתוח מערכות מכטרוניות. אנחנו מציעים ובוחנים את הסביבה הלימודית שפותחה במחלקה להוראת הטכנולוגיה והמדעים בטכניון .בסביבה זו סטודנטים ותלמידי בתי ספר עוסקים באתגרים טכנולוגיים משותפים ומתכוננים לתחרויות ברובוטיקה. מוטיבציה למחקר לפתח מסגרת להכשרת פרחי הוראה במחלקה לביצוע והנחיית פרויקטים ברובוטיקה ,כולל התנסות בפועל. לפתח במחלקה סביבה להוראת רובוטיקה לתלמידי בתי ספר כשדה לחקר תהליכי למידה. תרומת המחקר בהיבט המתודי – תוכנית לימודים לנושא מערכות במדע וטכנולוגיה בהיבט המתודולוגי -הגישה לפיתוח סביבות למידה התנסותית משותפות לפרחי הוראה ותלמידים בהיבט הטכנולוגי – סדרת מודלים של רובוטים המיושמים כאב-טיפוסים ללימודי תכן וניסוים מדעים בהיבט הקוגניטיבי -בחינת השפעת לימודי רובוטיקה על חשיבה יצירתית בהיבט ההתנהגותי – אפיון התנהגויות תלמידים בלימודי רובוטיקה מטרת מחקר ושאלות מחקר מטרה :לאפיין תהליכי פיתוח הסביבה הרובוטית ,הלמידה ההתנסותית בה ,והשפעת הלמידה על חשיבה יצירתית של הלומדים. שאלות מחקר: .1מהם מאפייני תכן של הסביבה הרובוטית ללימוד מערכות במדע וטכנולוגיה? .2מהם מאפייני למידה התנסותית בסביבה הרובוטית? .3כיצד הלמידה בסביבה הרובוטית מערבת את הלומד בתהליכי חשיבה יצירתית? אוכלוסיית המחקר :במחקר מעורבות שתי אוכלוסיות הלומדים :תלמידי בתי ספר והסטודנטים במחלקה העוסקים בביצוע משימות משותפות. סקר ספרות ורקע תיאורטי קונסטרוקטיביסם )Siegler, 1986 ) Piagetטוען כי "Knowledge is not transmitted to children, but is constructed in "the children's minds. קונסטרוקשיוניזם )Harel and Papert, 1991( Papertפיתח קונספציה של "קונסטרוקשיוניזם" המתייחסת לתהליכי למידה שבהם הלומד מעורב ביצירת תוצר ומשתמש בו כמוקד חשיבה ( )1998( Resnick .)object to think withפיתח גישה שבה בעזרת אלמנטים בתפעול דיגיטלי ()digital manipulatives ניתן להעלות את רמת ההתנסות יחסית לאלמנטים מכניים בתפעול ידני. בהתאם לגישה זו ,בנויה ערכה .Lego Mindstorms Learning by Design Kolodnerועמיתיה ( )1998פיתחו תוכנית לימודים שעל פיה נלמדים מושגים מדעיים דרך פעילויות תכן ובניית תוצרים .תפקיד המורה בתוכנית זו היה לעזור ללומד לזהות נקודות של חוסר ידע הנדרש כדי להשלים את המשימה ולעודד את הלומד בפעילויות חקר מדעי. Prototype-based Design Methodology This design methodology focuses on developing a product’s prototype that initially has a minimal set of basic features of the product and then is revised as new requirements to the product are discovered (Sommerville, 2001). The analysis, design, and implementation phases are performed concurrently and repeatedly in a cycle until the system is completed (Dennis et. al., 2002). Lantz (1986) proposes a model of rapid prototyping for quick synthesis and modification of products. The model includes the following stages: Determining Feasibility, Studying Present System, Defining Prototype, Building Prototype, Exercising Prototype, Converting and Installing. סקר ספרות ורקע תיאורטי (המשך) סביבות למידה (1996 ) Wilsonמגדיר סביבת למידה כמקום שבו תלמידים ומורים נמצאים באינטראקציות הדדיות ומשתמשים במגוון כלים ומקורות מידע כדי לסייע לתהליך הלימוד )2003( Nolen .טוען שקיים קשר בין תפיסות התלמידים את סביבת הלמידה שלהם לבין ההישגים הלימודיים )1987( Smith .מציין שקיימת השפעה משמעותית של סביבת הלמידה על ההתנהגות של הלומד )1979( Ihde .מדגיש ששימוש באותם חומרי לימוד בסביבות שונות גורם לתוצאות לימוד שונות. Experiential learning (Kolb, 1984) The learning process should be approached as a continuous spiral. The learning circle consists of 4 steps: 1. Carrying out a particular action and then seeing the effect of the action in this situation. 2. Understanding these effects in the particular instance. 3. Understanding the general principle under which the particular instance falls. 4. Application through action in a new circumstance within the range of generalization. סקר ספרות ורקע תיאורטי (המשך) אוריינות טכנולוגית התקנים לאוריינות טכנולוגית ( International Technology Education )Association, 2000מגדירים טכנולוגיה כידע אנושי המיושם לפתרון בעיות קיומיות של האדם .אוריינות טכנולוגית מתבטאת ביכולת הלומד להשתמש ,לתפעל, לבחון ולהבין טכנולוגיה. Wilsonו (2003) Harris -מגדירים נושאים מרכזיים למחקר בחינוך הטכנולוגי :פיתוח סביבות למידה ,תכנים של תוכניות לימודים ,שיטות הוראה ,הכשרה והתפתחות מקצועית של מורים. סקר ספרות ורקע תיאורטי (המשך) מחקר רב -שכבתי )2000( Leshפיתח מתודולוגיה למחקר חינוכי רב שכבתי ( .)Multi-tiered Approachלפיה, בתהליך למידה רב שכבתי המשלב אוכלוסיות שונות של לומדים כל שכבה מהווה אוכלוסייה מסייעת ותורמת ללומדי השכבות האחרותLesh . דיווח על מחקרו שמשלב שלוש אוכלוסיות (שכבות גיל וידע) שונות ,כגון תלמידים ,מורים וחוקרים. סקר ספרות ורקע תיאורטי (המשך) אינטראקציות לימודיות Cobbועמיתיו ( )1992מציינים שהלומדים רוכשים את הידע תוך קומוניקציה בין אישית. )2000( Vérillonמציע את מודל האינטראקציות בין הלומדים שלעיתים מערבת ארטיפאקט .ברובוטיקה זה רובוט. סקר ספרות ורקע תיאורטי (המשך) יצירתיות )1972) Torranceמגדיר יצירתיות כתהליך של יצירת רעיונות והנחות חדשות )1983) Mayer .טוען שדרך התערבות הלומדים בפתרון בעיות יצירתיות ניתן לפתח את היכולת היצירתית שלהם. חשיבה מתכנסת ומסתעפת )1959) Guilfordהגדיר חשיבה מתכנסת (convergent )thinkingכחשיבה שמובילה לפתרון נכון אחד שנקבע על -ידי העובדות הנתונות .לעומת זאת ,חשיבה מסתעפת ( divergent )thinkingמאפשרת תשובות מגוונות ומוצאת אותן בתחומי ידע רחבים ומגוונים יותר Guilford .מדגיש שקיים קשר הדוק בין פתרון יצירתי של בעיות לבין חשיבה מסתעפת. מבחני חשיבה יצירתית )1974 ,1972( Torranceבבניית מבחני יצירתיות התבסס על ארבעה גורמים שזוהו במחקרו של ,)1959( Guilford דהיינו: .1שטף ( - (fluencyגורם המתבטא ביכולת להעלות רעיונות רבים ככל שאפשר בזמן נתון. .2גמישות ( - (flexibilityמתבטאת ביכולת להעלות מגוון רב של רעיונות שאינם תלויים בתחום מסוים. .3מקוריות ) - (originalityנמדדת על -ידי נדירות סטטיסטית של רעיונות. .4פירוט נוסף ( - )elaborationמתבסס על יכולת ליצור פריטים חדשים ולשלב אותם בתוצר. פיתוח סביבת הלמידה הרובוטית במחקר סביבת הלמידה מכילה: א .מעבדה לטכנולוגיה במחלקה להוראת הטכנולוגיה והמדעים. ב .תכנית לימודים וחומרי לימוד. ג .ציוד ,מערכות טכנולוגיות שנרכשו ושפותחו במסגרת המחקר. The Rascal Kit Mechanicals Servomotors, aluminum links, parallel jawwrist-and-gripper assembly, construction bases, and other parts Electronic Interface Servo outputs, on-off outputs for device control, and sensor inputs (analog-to-digital and switch-closure). Software Scripting language for operating point-topoint movements from console and also programmatically from C/C++, Visual Basic, or Java. Technion Course Teaching methods in design and manufacturing (Dr. I. Verner – lecturer, E. Korchnoy – assistant) • Part of the Technion B.Sc. program in technology education. • Students learn how to guide projects through reflective practice in performing project assignments. • Emphases: educational value, attractive subject, final product, multidisciplinary connections, innovation and creativity. Topics studied through learning-by-doing activities * * * * * * * Mechanisms Manipulatives Kinematics Control processes Sensors Programming Applications * * * * * * * Experiential learning Design stages Team teaching Portfolio assessment Modelling Technical skills Communication skills The value of studying mechanisms 1. The students acquire experiences of machine control, which are important in various professional fields. 2. Practice in mechanisms’ analysis, synthesis and control is a good means of illustrating mathematical concepts and acquiring capabilities to apply mathematical methods to real problems. 3. Experiences with spatial mechanical structures promote development of students’ spatial imagery. 4. Through performing assignments of synthesis of new mechanisms the students can develop their creativity, technical and practical skills. A robotics course for middle schools נושאי הקורס • • • • • • • • • • הגדרת הרובוט זרוע הרובוט יחידת הקצה מערכת בקרה תכנון מסלולי תנועה חיישנים מנועי DCוServo - תמסורות הרכבת מנגנונים יישומי רובוטים דוגמאות הפרויקטים Ellipsograph - mechanism for drawing ellipses Experiments with the ellipsograph: - selecting an optimal drawing instrument, - the influence of the slider-crank parameters on the curve shape, - the drawing accuracy. The student in this project deepened in linkages and gear trains, and programmed the mechanism for drawing an accurate ellipse. The ballista project Project idea: A computer controlled mechanism for throwing balls to different distances. Kinematic scheme synthesis: Designing a mechanical arm operated by three servos. Kinematic analysis: Solving motion problems for the mechanism and the ball. Building the robot and the environment: Assembling the mechanical arm setting up the system. Programming the ballistic experiment: A Script language program. Chemist Robot Project Project idea: Automatic preparation of solutions of different concentration by means of a robot-manipulator. Selection of the laboratory utensils: Plastic beakers, pipettes, test-tubes, and a metal holder. They were fixed on a special slab. Designing a manipulator: A kinematic scheme in which the robot workspace matches to the lab environment. Building the robot and the environment: A six DOF manipulator, and a laboratory setting. Motion planning and programming: Experiments in grasping, orienting, and manipulating the pipette. Snake locomotion Snake robot project Movement creation: Understanding the biological principles of crawling and their modeling. Robot structure synthesis: Examining alternatives and creating a kinematic scheme of the robot. Mechanism analysis: Analysis of the robot mechanism's structure, dimensions and kinematic parameters. Building a mechanism: Selecting and producing parts, assembling a prototype, and its optimization. Programming robot motion: Modelling the crawling process as a cyclic sequence of four basic movements Blood examination assistant Project idea: A computer controlled mechanism for taking blood from the vein. Kinematic scheme synthesis: Designing a mechanical arm operated by three servos. Kinematic analysis: Solving motion problems for the mechanism and the syringe. Building the robot and the environment: Assembling the mechanical arm setting up the system. Programming the medicine experiment: A C++ language program. Robot Olympiad Projects Stair Climbing Biped Robot "At the end of the project, under all the influences of the environment – mentors, coworkers, goals, experiments – my behavior became optimal for working and learning. This was caused by my increased motivation to complete the task at hand and also my increasing interest and familiarity with the work being done. As I adjusted more to the environment, I became more and more effective in my work and learning. One of the reasons for this was my becoming familiar with physics and engineering concepts through the practical work with the construction. Also, important was the positive and creative influence upon me by the other participants in the project and our common orientation for the completion of the assignment” (From student’s reflection). Robot Olympiad Projects Dancing Robot “I found that working in robotics was very useful to me, in that I got to learn about many of the related scientific and technological topics. I find that robotics is a very good field in which to get a taste of many other disciplines and in this way creates a very good learning environment. Especially useful to me was the “trial and error” method, known as “rapid prototyping” in the robotics world. Using this method, it was much easier for a somewhat inexperienced programmer, such as me, to create working programs to control the robot”. Robot Olympiad Projects Shaving Robot "עד שבאתי לקורס רובוטיקה אהבתי לעבוד לבד כי לדעתי זה יותר הרבה נוח .היום אני יודע שיש עבודות שצריך לעבוד בקבוצה .ופרויקט לאולימפיאדה מאוד עזר לי בהתקשרות עם אנשי הצוות. להבין מה הבעיות של עמיתים ולעזור להם". מתודולוגית המחקר Our research focuses on the consideration of learning behaviors and creative thinking. The learning behavior is an indicator and measure of learning outcomes from the behavioral, cognitive, and social perspectives. According to the research focus we apply the qualitative methodology to understand how robotics practice can change behavior of the learners. מתודולוגית המחקר (המשך) המחקר נערך כמחקר פעולה ומתבסס בעיקר על שיטות איכותניות לאיסוף הנתונים מתוך תצפיות ,ראיונות ,שאלונים ,רישומים ביומן- חוקר .חשיבה יצירתית של תלמידים תבחן באמצעות מבחני חשיבה יצירתית של טורנס (.)Torrans, 1972 השיטה של מחקר פעולה נבחרה עקב הסיבות הבאות: המחקר בוחן לעומק תהליכי למידה התנסותית המתקיימים בסביבהלימודית שפותחה ע"י החוקר. המחקר מנתח תהליכי תכן רובוטים. -המחקר עוקב אחרי התפתחות מיומנויות חשיבה ומיומנויות מעשיות. המחקר נערך כחקר מקרים וניתוח מעגלי למידה התנסותית .ניתוח הנתונים ויצירת קטגוריות המתארות תהליכי הלמידה נעשה בשיטה אינדוקטיבית ( )Goets & Lecompte, 1984המתבססת על תיאוריה מעוגנת בשדה ( Strauss,1987; Straussו.)Corbin, 1990 - Findings Learning behaviors characteristics By the inductive analysis of observations and reflections we indicated the following main characteristics of learning behaviors in the robotics studies: Self-confidence Help Cooperation Interest Seriousness Self-dependence Capacity for work Responsibility Work stress, Creativity, Power of observation Perseverance (persistence). Self-confidence As for the self-confidence characteristic, we found that the self-confidence growth was an important condition of student and pupil success in our robotics courses and projects. Recommended ways to develop learner’s selfefficacy (self-confidence) (Bandura, 1986) are: Mastery experiences in which the learner overcomes obstacles through perseverant effort; Observing examples of successful experiences of other learners; Benevolent appraisal of the learner’s achievements by the mentor and avoiding possible failure situations; Positive spirit and mood in class. Self-confidence (cont.) Addressing the recommendations in teaching robotics: Mastery experiences are provided using the scaffolding instruction approach (Jonassen, 1998). Accordingly, we assign robotics tasks which are above the level of what the learners can do by themselves, but help them to acquire knowledge and skills needed to accomplish the tasks. The learners observe examples of robot prototypes from our collection of past projects and attend seminar talks given by other students. The friendly atmosphere of robotics community in the departmental laboratory of technology stimulates students and instructors. We found benevolent mentoring especially important for teacher students who have limited background in control and programming. Findings (cont.) Creativity Development The figural Torrance Test of Creative Thinking (Torrance , 1972) was conducted before and after the robotics courses given to six groups in 2004-2006 (N=63). The two of its sub-tests were conducted: the Picture Construction test examined learner's originality and elaboration, and the Incomplete Figures test concerned fluency, originality, flexibility and elaboration categories (scored separately). Development (cont.)Creativity As shown by the diagrams, most of the square marks are located above the dotted diagonal. It means that the majority of pupils (83.9%) performed on the post-test better than the pre-test. T-test indicated that the improvement in both sub-tests is significant with level of significance α = .01. Development (cont.) Creativity The learners made significant progress in the ability to develop their own ideas related to the given theme. A possible reason for this improvement is that in the course experimentation the pupils developed their own robots, grounding on the prototypes developed by the teacher students. The International Robot Olympiad competition facilitates students creativity. A similarity between the Robot Concept Design test and the Torrance Test of Creative Thinking can be noted. Therefore, learning practice of modifying robot prototypes can be recommended in order to prepare students for the robot competition. )Findings (cont. מאפייני תכן של סביבה רובוטית תהליך התכן כולל שלבים הבאים: בחירת נושא והגדרת בעיית הפרויקט לימוד חומר תיאורטי ואיסוף מידע הכנת סכמות קינמטיות ,סקיצות וביצוע חישובים יצירת אב-טיפוס ראשוני ביצוע בדיקות וניסויים יצירת אב-טיפוס אלטרנטיבי. הצגת פרויקט התגלה קשר הדוק בין שלבי התכן לדרכים להנחיית הפרויקט (.)scaffolding Hands-On Rapid Prototyping Design Model In Educational Robotics Projects הכנת סכמות קינמטיות ,סקיצות וביצוע חישובים בחירת נושא והגדרת בעיית פרויקט לימוד חומר תיאורטי ואיסוף מידע יצירת אב-טיפוס ראשוני ביצוע בדיקות וניסוים הצגת פרויקט יצירת אב-טיפוס אלטרנטיבי S C A F F O L D I N G Conclusions Modern education requires teachers' involvement in guiding student projects which include designing and building computer controlled technological systems .Our Technion course "Teaching methods in design and manufacturing" presents a possible approach to teacher training in the subject. We found that collaboration of teacher students and pupils in the common robotics environment is effective for both groups. The collection of robot prototypes is an important part of the learning environment. The practice of studying prototypes and creating new robots helps the learners to improve behavior characteristics, and advance their learning skills. תודות ברצוני להביע את תודתי העמוקה למנחה דר' איגור ורנר על העזרה ,הדאגה וההנחיה האקדמית לסגנית המנהל ומרכזת לימודי בחירה של ביה"ס הריאלי העברי (סניף מטו"ס) גב' רבקה גינצבורג לפרופסור מיכאל מור לפרופסור יהודית דורי לפרופסור אברהם ברמן לפרופסור מנחם כפתורי לצוות :SciTechרוויטל ,ענת ,סימה ואילת לפרופסור מנחם וויס לדר' שלמה מרקל לדר' שרה מאור לדר' משה דקלו לדר' ילנה דווידוביץ' לדר' בוריס קויצ'ו למר' יוסי ברזלאי למר' איל הרשקו לגב' בתיה רצ'יסטר לסטודנטים :חנוך טאוב ,ולאדיסלב לנדה ,אנדרי דכטאר ,מיכאל גולדשמידט ודרור ברקן לתלמידים :עמית מרקל ודין זיסמן