WSNTsunami
advertisement

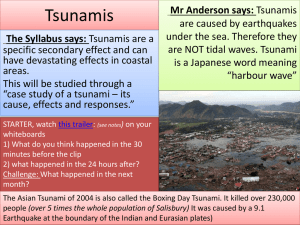
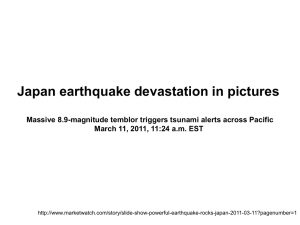
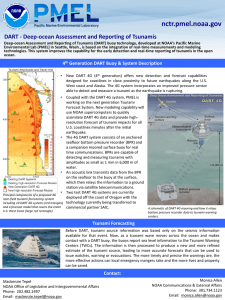
Wireless Sensor Networks in Tsunami Detection TCOM 510 Wireless Networking Soumya Sen, Prerit Gupta, Redwan Kabir Outline Tsunami Tsunami Detection System (TDS) Previous Underwater Sensor Networks Current Research on Tsunami Detection Acoustic Sensor Networks in TDS Conclusion Tsunami Tsunami is a series of waves generated when a body of water such as a lake or ocean is rapidly displaced on a massive scale. Primary causes of Tsunami are Earthquakes Underwater landslides Underwater volcanic eruptions Meteoric impact The Asian Tsunami of 2004 Tsunami Detection System A Tsunami Detection System is a system to detect tsunamis and issue warnings to prevent loss of life. This system uses seismic data as its starting point, but then also takes into account oceanographic data when calculating possible threats. It consists of two equally important aspects: A network of sensors to detect tsunamis A communications infrastructure to issue timely alarms to permit evacuation of coastal areas Previous UW Sensor Networks The traditional approach for ocean-bottom or oceancolumn monitoring is to deploy underwater sensors that record data during the monitoring mission, and then recover the instruments. The problems with this approach in the detection of tsunamis are manifold. No real time monitoring No online system reconfiguration No failure detection Limited Storage Capacity Current Tsunami Warning Systems The current tsunami warning systems being deployed all over the world have two essential components. We suggest the third component, a global positioning system for faster and more accurate determination of earthquake magnitudes, which is essential for timely tsunami warnings. Buoy – Bottom Pressure Recorder System (Tsunameter) Satellite N etwork Global Positioning System Buoy – Bottom Pressure Recorder System The BPRS uses a quartz crystal resonator to measure ambient pressure and temperature. The resonator uses a thin quartz crystal beam, electrically induced to vibrate at its lowest resonant mode. It communicates these measurements to the surface buoy through an acoustic modem. GPS in Tsunami Detection Currently, estimating the magnitude of earthquakes accurately takes around 1 hour or more. In the case of tsunami detection, where time is of essence, measuring seismic activity as quickly as possible is of utmost importance. An earthquake's true size and tsunami potential can be determined using Global Positioning System (GPS) data up to only 15 min after earthquake initiation, by tracking the mean displacement of the Earth's surface associated with the arrival of seismic waves. Satellite Network The surface buoys are connected to a satellite network, which is used to relay information and commands from the BPRS to a Tsunami warning center or vice versa. DART II System Communication Network Design Challenges for Acoustic Sensor Networks (ASN) Battery power is limited Available bandwidth is limited Undesired channel characteristics, delay variance. High bit error rates, attenuation, noise Underwater sensors are prone to failure because of fouling, corrosion etc. ASN Architecture B/W Ranges of UWA channels Design issues: Physical layer ASK- attenuation! PSK- coherent detection! (difficult PLL) - Differential PSK (solves the coherent detection problem partially, but error probability is higher) FSK- non-coherent energy detection based (guard bands needed) OFDM- good one (use bit loading) Modern technology can use QAM & PSK with feedback channels (Decision Feedback equalizers) Data Link Layer FDMA not very suitable due to narrow b/w and vulnerability of limited band systems to fading and multipath. TDMA has limited b/w efficiency because of long time guards, synchronization issue. CSMA can prevent collisions at Tx side, but not on receiver side, inefficient protocol. RTS/CTS-impractical (large delays, synchronization issue) CDMA –at last! Robust to freq selective fading, less retransmissions, less power needed FEC (as ARQ is inefficient here) Network layer Routing information -Proactive: DSDV (too much overhead & memory req) -Reactive: AOVD (too slow, requires flooding!) -Geographical routing protocols (localization information, GPS isn’t too accurate for UWSN) -Centralized network manager (polling) Multi-hop routing requires less energy than single hop in UW scenarios. Use of Virtual Circuits for UW-ASNs. Transport Layer Still no good protocols proposed! Flow control, congestion control needed. But traditional end-to-end guarantee may not feasible here- RTT too high! Research directions: integrating these at the lower layers where we have channel information. Application layer Not explored yet! Directions: SRB (storage Resource broker), a clientserver middleware that provides uniform interface for connecting to heterogeneous data resources over a network, and accessing replicated data sets based on their attributes or logical names rather than physical location or name. Deployment of BPRS Deep-Ocean Assessment and Reporting of Tsunamis (DART) sized buoys are generally large, weighing over 4000 kg. They require the use of larger boats that have A-frame structures and cranes. Buoys must be serviced every 1-2 years. The Front-Resolving Observational Network with Telemetry (FRONT) –Univ. of Connecticut accomplish data telemetry and remote control for a set of widely spaced oceanographic sensors by using through-water acoustic signaling (telesonar) to form an undersea wireless network (Seaweb) List of FRONT experiments done Present UWSN: Deep-ocean Assessment and Reporting of Tsunamis http://www.ndbc.noaa.gov/dart.shtml Conclusion In light of the events of the 2004 tsunami in South Asia, there has been an increasing concern about future tsunami threats, and with it, growing interest in tsunami detection and prevention systems. This presentation has shown that Wireless Sensor Networks can be used for successful and timely detection of tsunami. We presented the basic concepts, challenges, design issues and research directions in UWSN. References Underwater acoustic sensor networks: research challenges, Ian F. Akyildiz , Dario Pompili, Tommaso Melodia Rapid determination of earthquake magnitude using GPS for tsunami warning systems, Geoffrey Blewitt, Corné Kreemer, William C. Hammond, Hans-Peter Plag, Seth Stein and Emile Okal http://www.ndbc.noaa.gov/Dart/dart.shtml http://web.mit.edu/12.000/www/m2009/teams/5/ http://www.pmel.noaa.gov/tsunami/Dart/dart_sh1.html Questions? Questions? Thank you!