UNIVERSITE DENIS SASSOU N’GUESSO
INSTITUT SUPERIEUR d’ARCHITECTURE, URBAMISME, BÂTIMENT ET
TRAVAUX PUBLICS (ISAUBTP)
MÉCANIQUE DES FLUIDES
Notes de cours à l’usage des étudiants de deuxième année
de licence d’Architecture et BTP
Année académique 2024-2025
Par :
Dr. MABELET Lagloire Bienvenu
Table de Matière
1 Chapitre 1 : Introduction à la mécanique des fluides
2
1.1
Définitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
1.2
Caractéristiques physiques des fluides . . . . . . . . . . . . . . . . . . . . . . . . .
3
1.2.1
Masse volumique et poids spécifique : . . . . . . . . . . . . . . . . . . . . .
3
1.2.2
Densité : . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
1.2.3
Viscosité : . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
1.2.4
Compressibilité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
1.3
Ecoulement d’un fluide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
1.4
Forces subies par une particule fluide . . . . . . . . . . . . . . . . . . . . . . . . .
6
1.4.1
Forces volumiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
1.4.1.1
Le poids ou force de pesanteur . . . . . . . . . . . . . . . . . . .
6
1.4.1.2
La force électromagnétique . . . . . . . . . . . . . . . . . . . . .
6
Forces surfaciques ou de contact . . . . . . . . . . . . . . . . . . . . . . . .
6
1.4.2.1
Force de pression . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
1.4.2.2
Force de viscosité . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
1.5
Fluide parfait et fluide réel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9
1.6
Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9
1.4.2
2 Chapitre 2 : STATIQUE DES FLUIDES
12
2.1
Bilan des forces exercées sur un volume de fluide . . . . . . . . . . . . . . . . . . .
12
2.2
Équation fondamentale de la statique des fluides . . . . . . . . . . . . . . . . . . .
12
2.2.1
Fluide incompressible . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12
2.2.2
Pour des fluides compressibles . . . . . . . . . . . . . . . . . . . . . . . . .
13
Applications de la loi de l’hydrostatique . . . . . . . . . . . . . . . . . . . . . . .
14
2.3.1
Forces d’un fluide sur une paroi verticale . . . . . . . . . . . . . . . . . . .
14
2.4
Théorème de Pascal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
15
2.5
Poussée d’Archimède . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
16
2.3
3 Chapitre 2 : DYNAMIQUE DES FLUIDES
3.1
D’finitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2
17
17
3.2
3.3
3.4
Équation fondamentale de la dynamique des fluides parfaits . . . . . . . . . . . .
18
3.2.1
Accélération d’une particule fluide (Accélération particulaire) . . . . . . . .
18
3.2.2
Différents types d’écoulements . . . . . . . . . . . . . . . . . . . . . . . . .
18
3.2.3
Étude dynamique
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
19
3.2.4
Fluides parfaits : équations de Bernoulli . . . . . . . . . . . . . . . . . . .
20
3.2.5
Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
21
Dynamique d’un fluide réel : équation de Navier-Stokes . . . . . . . . . . . . . . .
22
3.3.1
Nombre de Reynolds . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
22
Pertes de charge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
23
3.4.1
Charge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
23
3.4.2
Ecoulement de Poiseuille (loi de Poiseuille) . . . . . . . . . . . . . . . . . .
24
Bibliographie
28
1
Chapitre 1
Introduction à la mécanique des
fluides
La mécanique des fluides est une partie de la physique qui traite le comportement des fluides au
repos (statique des fluides) et en mouvement (dynamique des fluides) selon les lois de la mécanique
(pression, énergie) et de la thermodynamique. Elle offre de nombreuses applications dans diverses
disciplines, comme le génie énergétique, le génie environnemental, le génie naval, le génie civil,
l’agriculture, l’agroalimentaire... . La mécanique des fluides comprend deux grandes sous branches :
• la statique des fluides, ou hydrostatique qui étudie les fluides au repos ;
• la dynamique des fluides qui étudie les fluides en mouvement.
On distingue également d’autres branches liées à la mécanique des fluides :
• La mécanique des fluides lorsqu’elle est appliquée aux liquides, plus généralement l’eau ; on
parle d’hydromécanique (l’hydrostatique et l’hydrodynamique).
• La mécanique des fluides lorsqu’elle est appliquée aux gaz, plus généralement l’air ; on parle
d’aéomécanique (aérostattique et aérodynamique).
1.1
Définitions
Qu’est-ce qu’un fluide ?
C’est un milieu matériel :
• continu où ses propriétés (volume et masse volumique) varient d’une façon continue ; par
exemple, on affecte à chaque point P , pour chaque instant t, une masse volumique ρ
représentative de la population des molécules intérieures au volume dV de la particule ;
• déformable (n’ayant pas de forme propre) où les molécules peuvent facilement glisser les unes
sur les autres ; dans ce sens le fluide épouse la forme du récipient qui le contient ;
• qui peut s’écouler plus ou moins facilement d’un récipient à un autre ou dans une conduite :
des forces de frottements qui s’opposent au glissement des particules de fluide les unes contre
les autres peuvent apparaître car tout fluide réel a une viscosité.
De façon résumée, un fluide est un milieu matériel continu qui se déforme continuellement sous
l’action de la moindre force de cisaillement. Le mot fluide traduit une substance dans laquelle les
2
éléments constitutifs se déplacent librement (fluides idéaux, dits non visqueux, dits parfaits) ou
une liberté restreinte (fluides réels, dits visqueux).
L’état fluide :
Il englobe deux des trois états de la matière : le liquide et le gaz. Les liquides et gaz habituellement
étudiés sont isotropes (leurs propriétés sont identiques dans toutes les directions de l’espace).
Particule fluide
La particule fluide est un « paquet » de molécules entourant un point donné qui se déplace avec
le fluide. Elle est caractérisée du point de vue thermodynamique par sa masse volumique (ρ), sa
pression (p) et sa température (T ). Pour l’étude du mouvement, on introduit la position et la
vitesse de la particule qui se translate, tourne sur elle-même et se déforme quand elle s’écoule.
1.2
Caractéristiques physiques des fluides
Les fluides possèdent des particularités (caractériques) permettant de décrire leurs conditions
physiques dans un état donné. Ces caractéristiques physiques comprend : la masse volumique, la
densité et la compressibilité.
1.2.1
Masse volumique et poids spécifique :
La masse volumique (notée ρ) ou masse spécifique est la masse (m, en kg) de l’unité de volume
(V , en m3 ) du corps considéré :
ρ=
m
V
(kg/m3 )
(1.1)
Exmples :
Fluides
Benzène
Eau
Huile d’olive
Mercure
Air
Hydrogène
Méthane
Masse volumiques ρ (kg.m−3 )
0, 880.103
103
0, 918.103
13, 546.103
0, 001205.103
0, 000085.103
0, 000717.103
Tableau 1.1 –
Le poids volumique spécifique (noté, $) est la force de gravité agissant sur la masse par unité
de volume :
$=
m.g
= ρ.g (N.m−3 )
V
où g est le champ de pesanteur.
3
(1.2)
1.2.2
Densité :
La densité est définie par :
d=
1.2.3
ρ
masse volumique du fluide
=
masse volumique d’un fluide de référence
ρ0
(1.3)
Viscosité :
La viscosité, qui est une propriété physique du fluide se manifestant par une résistance au
mouvement, elle est causée par les frottements entre particules fluides lors du mouvement et elle
provoque une dissipation de l’énergie cinétique qui est transformée en chaleur.
1.2.4
Compressibilité
La propriété physique qui permet de distinguer un liquide et un gaz est la compressibilité. Un
liquide est un fluide occupant un volume déterminé, qui ne peut varier que très peu suite à de
fortes variations de pression ou de température ; donc le liquide est incompressible. Un gaz, par
contre a tendence d’occuper le volume maximal qui lui est offert : c’est un fluide essentiellement
compressible (ou expansible).
Un fluide est qualifié d’incompressible lorsque sa masse volumique ne dépend pas de la pression
exercée sur ce fluide.
Exemples :
• l’eau et plus généralement les liquides sont des fluides incompressibles et
• par contre ; l’air et plus généralement les gaz, sont des fluides compressibles.
La compressibilité des liquides est définie par leur module d’élasticité Em (M P a ou N.mm−2 )
défini par :
Em = −V
∆P
∆V
(1.4)
Avec P est la pression en P a et V le volume en mm3 . Dans le cas de l’eau, son module d’élasticité
varie avec la température, le tableau 1.2 présente quelques valeurs du module d’élasticité de l’eau en
fonction de la température.
θ (°C)
0
5
10
20
25
30
40
100
ω (kN.m−3 )
9, 805
9, 807
9, 804
9, 789
9, 777
9, 764
9, 730
9, 399
ρ (kg.m−3 )
998, 8
1000, 0
999, 7
998, 2
997, 0
995, 7
992, 2
958, 4
Pvap (kN.m−2 )
0, 61
0, 87
1, 23
2, 34
3, 17
4, 24
7, 38
101, 33
Tableau 1.2 –
4
Em (GP a)
2, 02
2.06
2, 10
2, 18
2, 22
2, 25
2, 28
2, 07
Pour des fluides compressibles
En général, les fluides compressibles sont des gaz caractérisés par une masse volumique dépendant de la
pression, on restreint cette étude aux gaz parfaits :
P V = nRT
(1.5)
cette relation est appelée l’équation d’état des gaz parfaits, où P est la pression absolue en P a, V le
volume en m−3 , T la température en Kelvins, n le nombre de moles et R la constante universelle des gaz
parfaits dont la valeur est 8, 314 J(mol.K)−1 .
ρ=
m
nM
P
=
=
M
V
V
RT
(1.6)
Pour connaître la pression en tout point du gaz, on se sert de la RFH :
M
dP
= −ρ(p)g =
.M g
dz
RT
Si la température est constante ; alors :
(1.7)
gM
= C ste et la pression correspond :
RT
M
M
ln(P ) = −
.gz + cste ⇒ P (z) = P0 exp −
(z − z0 ) .
RT
RT
1.3
(1.8)
Ecoulement d’un fluide
Il existe différents types d’écoulements : écoulement unidimensionnel, bidimensionnel, tridimensionnel,
uniforme, permanent, laminaire et turbulent.
1. Ecoulement uniforme : les variables de l’écoulement du fluide ne dépendent que d’une seule
coordonnée de l’espace et éventuellement le temps. Elles sont donc les mêmes en tout point d’une
section.
2. Ecoulement bidimensionnel ou plan : les variables de l’écoulement dépendent de deux coordonnées de l’espace et éventuellement le temps.
3. Ecoulement tridimensionnel ou spatial : les variables de l’écoulement dépendent des trois
coordonnées de l’espace et éventuellement le temps.
4. Ecoulement uniforme : un écoulement est dit uniforme à un instant si les grandeurs physiques
(pression, température, vitesse, masse volumique) ne dépendent pas des coordonnées de l’espace.
5. Ecoulement permanent ou stationnaire : un écoulement est dit permanent (ou stationnaire)
si les grandeurs physiques représentatives sont indépendantes du temps, elles ne dépendent que des
coordonnées de l’espace. Dans le cas contraire il est dit non permanent ou instationnaire.
6. Ecoulement laminaire et turbulent : l’écoulement est laminaire lorsque le déplacement du
fluide se fait suivant des droites parallèles disposées en couches. Il est dit turbulent lorsqu’il se
5
déplace d’une manière désordonnée en formant des tourbillons de tailles différentes accompagnés
d’un mélange ou brassage très intensif des particules fluides.
1.4
Forces subies par une particule fluide
Pour étudier un fluide, il nécessaire de connaître les différentes types des forces que subies celui-ci. Nous
considérons une particule fluide à l’intérieur d’un fluide, au sein d’un fluide, la particule fluide subit deux
types de forces : les forces volumiques (ou massiques) celles dûes aux contacts entre particules fluides à
l’intérieur d’un fluide (ou forces surfaciques).
1.4.1
Forces volumiques
Ce qui est définie ici de forces volumiques, les actions à distance qui se manifestent sur toutes les particules
fluides de sorte qu’elles sont proportionnelles au volume de la particule fluide considérée. Il s’agit ici du
poids, la force électromagnétiques. Pour une particule de fluide de masse dm = ρdV , la force à distance se
met sous la forme :
→
−
d F V = f~V dV ;
(1.9)
où fV est la force volumique (ou poids volumique). La résultante des forces à distance sur tout le volume
(V ) se calcule comme :
→
−
FV =
1.4.1.1
Z
(V )
f~V dV
(1.10)
Le poids ou force de pesanteur
→
−
Pour une particule fluide de masse dm plongée dans un champ de pesanteur (~g ), la résultante F p s’écrit :
→
−
Fg =
1.4.1.2
Z
(V )
~g dm =
Z
(V )
ρ~g dV ; avec
f~V = ρ~g .
(1.11)
La force électromagnétique
Pour un plasma (mélange ions et électrons) baignant dans un champ électromagnétique on a :
→
−
F em =
1.4.2
Z
→
−
−
~ ∧→
dq( E + U
B) =
Z
(V )
f~V dV ; avec
→
−
−
~ ∧→
f~V = ρe ( E + U
B)
(1.12)
Forces surfaciques ou de contact
Une particule fluide de surface élémentaire dS subit des effets de contact dûs aux particules fluides
environnantes. Ces effets sont dits internes au fluide et la particule fluide subit de la part de ses voisines
→
−
→
−
des forces d F s . Pour une particule fluide de surface d S ext , la force de contact s’écrit sous la forme :
→
−
dF s = −
Z
S
→
−
fs d S ext
→
−
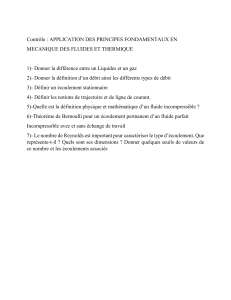
La force de surfacique est F s est la résultante de deux composantes (voir figure 1.1) :
6
(1.13)
d Fs
dFn
dS
dFt
Figure 1.1
→
−
→
−
• une tangente à dS, notée d F t (ou d F vis ) due aux frottements entre particules fluides à l’intérieur
du fluide, appelée force de viscosité et
→
−
• une normale à dS, notée d F n appelée force de pression.
→
−
→
−
→
−
d F s = d F vis + d F n
1.4.2.1
(1.14)
Force de pression
La composante normale de la force de contact est tel que :
→
−
Fn =−
Z
(S)
→
−
P d S ext = −
Z
(S)
P dS ~n ; avec P =
Fn
S
(1.15)
Où ~n est le vecteur normal à la surface élémentaire dS et P (N m−2 ) est la pression et le signe négatif
traduit le fait que les forces de pression du fluide environnant sur le volume de contrôle sont dans le sens
opposé à la normale sortante ~n à V . C’est ainsi qu’on l’appelle force de pression.
Unités
Dans le Système International d’unités (SI), la pression s’exprime en pascal (symbole P a), en hommage
au physicien Blaise Pascal :
1P a = 1N.m−2
Autres unités
Il existe aussi d’autres unités très d’usages encore, qui sont présentées dans le tableau ci-après :
1.4.2.2
Unités
Équivalence en Pascal
bar
1 bar = 105 P a
atmosphère
1 atm = 1, 013.105 P a
torr
1 torr = 1 mm Hg = 133, 3 P a
Force de viscosité
Viscosité
7
(1.16)
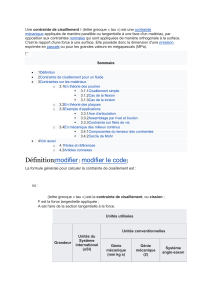
L’expérience de Couette est beaucoup utilisée pour mettre en évidence l’existance de la viscosité. On
dispose d’une plaque de surface S infinement mince, flottant à la surface libre d’un liquide au repos. La
→
−
hauteur du liquide est égale à h. Pour atteindre une vitesse de déplacement égale à U , il faut exercer sur
→
−
la plaque une force F ; voir figure 1.2.
Figure 1.2
On observe que :
• la plaque adhère au fluide puisqu’elle l’entraîne dans son mouvement ;
• les couches horizontales frottent l’une sur autre de telle manière que le mouvement se transmet de
la plaque aux couches plus basses.
• on obtient un champ de vitesse suivant la hauteur h.
Cela signifie que chaque lame horizontale subit une force tangentielle de la part de ses voisins (force de
cisaillement). Pour un fluide (liquide) ayant une viscosité (µ) donnée, la force de viscosité s’écrit :
→
−
→
−
∂U
∆U
F vis = F µ = µS
~ez ou simplement Fvis = µS
.
∂z
∆z
(1.17)
Où :
• µ, est la viscosité dynamique en (P a.s ou kg/m.s) ;
• S, la surface de contact entre deux couches en (m2 ) ;
• ∆U , l’écart de vitesse entre deux couches en (m.s−1 ) et
• ∆z, la distance entre deux couches en (m).
Pour une particule fluide, on aurra :
→
−
∂u
dF µ = µ
~ez dS
∂z
(1.18)
De façon générale, la résultante des forces surfaciques de la relation (1.21) s’écrit :
→
−
Fs =−
|
Z
(S)
P ~ndS + µ
{z
−
→
Fp
}
8
|
→
−
∇U dS .
Z
(S)
{z
−
→
Fµ
}
(1.19)
1.5
Fluide parfait et fluide réel
Fluide parfait
Un fluide est dit parfait lorsqu’il est possible de décrire son mouvement sans prendre en compte les
effets de frottement. Le fluide parfait (idéal) est incompressible et de viscosité est nulle. Par
conséquent, la résultante des forces de contact s’écrit :
→
−
Fs =−
Z
(S)
→
−
P ~ndS = F p .
(1.20)
Fluide réel
Dans le cas d’un fluide réel (visqueux), la résultante des forces surfaciques (ou de contact) sécrit :
→
−
→
−
→
−
F int = F P + F vis
(1.21)
→
−
avec F vis la force de frottement (force de viscosité) parallèle à dS.
Le fluide réel (c’est-à-dire non parfait) sera caractérisé par deux propriétés importantes :
• La viscosité et ;
• L’adhérence du fluide aux parois solides.
Contrairement au fluide parfait pour lequel la vitesse d’écoulement possède une valeur non nulle à la
paroi, le fluide réel adhère parfaitement à la paroi au point où sa vitesse s’annulle à cet endroit.
On peut définir la viscosité cinématique :
υ=
µ
ρ
(1.22)
Son unité est m2 s−1 .
Remarques
1. On utilise souvent le Stockes (St) comme unité de mesure de la viscosité cinématique, avec :
1 St = 10−4 m2 s−1 .
(1.23)
2. La viscosité des fluides dépend en grande partie de leur température.
1.6
Applications
1. Ecrivez ce que vaut 1 P a en fonction des unités de la force et de la surface.
2. Un objet de 50, 0 kg est posé sur le sol. Sa section horizontale vaut 0, 250 m2 . Quelle pression son
poids exerce-t-il sur le sol ?
9
3. Un objet exerce une pression de 120 P a sur une surface de 0, 300 m2 . Quelle est la masse de cet
objet ?
4. Un objet de 30, 0 kg exerce une pression de 1200 P a sur le sol. Quelle est la surface de contact de
cet objet avec le sol ?
Pression partielle dans un liquide non compressible
1. Exprimez en fonction des grandeurs ρ, h, S et g :
(a) la masse m du liquide contenu dans ce récipient ;
(b) la force de pesanteur Fp du liquide contenu dans ce récipient ;
(c) la pression P exercée par ce liquide sur le fond du récipient.
Concluez en écrivant une formule exprimant la pression P exercée par ce liquide sur le fond du
récipient en fonction de la masse volumique du liquide ρ, de la hauteur h et de la gravitation g.
2. Le profil de vitesse au sein d’une conduite de 2 cm de diamètre est donné par l’expression suivante :
V (r) = 10 1 − (100r)2 m/s. Calculez la contrainte de cisaillement à la paroi si l’eau est à 25°C.
Note : vous devrez calculer le gradient de vitesse dv/dr à la paroi (r = 0 cm au centre, r = 1 cm à
la paroi).
Pression dans un gaz
1. Un cylindre vertical fermé par un piston sans frottement et muni de butées contient de l’air. La
section du piston est de 0,2 m 2 . L’air est initialement à 200 kPa (pression absolue) et à 500° C ; il
est ensuite refroidi par suite d’un échange de chaleur vers le milieu ambiant.
(a) Quelle est la température de l’air contenu dans le cylindre au moment où le piston atteint les
butées sachant que cette évolution est à pression constante ?
(b) le refroidissement est poursuivi jusqu’à ce que la température atteigne 20° C, quelle est la
pression à l’intérieur du cylindre dans ce dernier état ?
2. Un cylindre d’air comprimé fait 240 mm de diamètre et un mètre de long. Un indicateur de pression
relative indique que la pression est de 0, 6 M P a lorsque la température est de 20°C. Trouver la
masse d’air à l’intérieur du cylindre. (Pabsolue = Prelative + Patmosphérique).
Viscosité d’un liquide
Un fluide remplit l’espace entre deux plaques posées l’une sur l’autre dans un plan horizontal. Les deux
plaques sont distantes de 5 mm. Une contrainte de 100 P a permet de déplacer la plaque supérieure à
10
une vitesse de 1 m/s. Le profil de vitesse entre les deux plaques est linéaire. Veuillez calculer la viscosité
dynamique du fluide entre les deux plaques.
11
Chapitre 2
STATIQUES DES FLUIDES
Objectifs
À l’issue de ce chapitre, l’Étudiant doit être capable :
X D’établir la relation de l’hydrostatique.
X Calculer la pression en tout point d’un fluide immobile ;
X Calculer les efforts exercés par un fluide au repos sur une surface indéformable ; Déterminer le point
application de la résultante des efforts exercés.
La statique est la branche qui étudie les fluides au repos, dans lesquels il n’existe aucun déplacement
macroscopique des particules fluides. Par conséquent, la vitesse et accélération des particules fluides dans
le fluide est nulle partout. Ce qui signifie qu’il n’y a pas de frottements ( contrainte de cisaillement) entre
particules fluides dans un fluide au repos. Donc, les forces surfaciques qui agissent sur les particules fluides
se réduisent uniquement aux forces de pression et s’exercent perpendiculairement à ces surfaces.
La statique traite donc les forces exercées par le fluide sur des corps et surfaces immergés ou sur
des corps flottants. Dans ce chapitre, nous considérerons les fluides (liquides ou gaz) au repos dans un
référentiel galiléen.
2.1
Bilan des forces exercées sur un volume de fluide
Dans fluide au repos, les seules forces qui s’exercent sur une particule fluide sont la force volumique (le
poids) et les forces de surface dues à la pression, puisqu’il n’y a mouvement des particules fluides donc
l’effet de la viscosité est très nul.
X→
−
F ext =
Z
ρ~g dV −
(V )
Z
P dS~n
(S)
2.2
Équation fondamentale de la statique des fluides
2.2.1
Fluide incompressible
(2.1)
Considérons un liquide incompressible (masse volumique est constante). Pour une particule fluide en
forme cubique de volume dV en coordonnées cartésiennes, les forces qui s’exercent sur cet élément de
volume cubique au repos sont présentées dans la figure 2.1
12
−P(z+dz)dxdy
z
(x,y,z)
y
P(z)dxdy
x
Figure 2.1 –
La résultante des forces des surfaces peut s’écrire en coordonnées cartésiennes :
−
→
dFs = dFx~ex + dFy ~ey + dFz ~ez .
(2.2)
−
→
dFs Étant perpendiculaire aux surfaces, les composantes horizontales suivant ~ex et ~ey se compensent entre
elles, et la la composente verticule (~ez ) s’oppose au poids de la particule fluide.
(−P (z + dz) + P (z)) dxdy − ρ gdxdydz = 0
=⇒ −P (z + dz) + P (z) − ρg dz = 0
(2.3)
En faisant le développement limité à l’ordre 1 de P (z + dz) de l’équation 3.29, on obtient :
−
∂P
dP
dz − ρg dz = 0 soit
= −ρg
∂z
dz
(2.4)
Cette équation peut se généraliser de la manière suivante :
→
−
∇P = ρ~g ;
(2.5)
c’est l’équation fondamentale de la statique des fluides ou l’équation (loi) de l’hydrostatique. Elle est
valable tant pour des fluides fluides parfaits que réels au repos.
2.2.2
Pour des fluides compressibles
En général, les fluides compressibles sont des gaz caractérisés par une masse volumique dépendant de la
pression, on restreint cette étude aux gaz parfaits :
P V = mRT ; c’est l’équation des gaz parfaits.
P =
m
RT = ρRT
V
=⇒ ρ =
P
.
RT
(2.6)
(2.7)
Pour connaître la pression en tout point du gaz, on se sert de la RFH. Considérons laune pression
horizontale appliquée au gaz, l’équation 2.6 donne :
dP
P
=−
g ⇐⇒
dz
RT
13
dP
g
=−
dz
P
RT
(2.8)
Si la température est constante ; alors :
g
= Cste et en intégrant deux états (1) et (2), la pression
RT
correspond :
ln(P ) = −
2.3
M
M
.gz + cste ⇒ P(2) = P(1) exp −
(z − z0 ) .
RT
RT
(2.9)
Applications de la loi de l’hydrostatique
Mesure de la pression atmosphérique : Baromètre de Torricelli (Manomètre à mercure)
Le baromètre ne sert qu’à mesurer la pression atmosphérique. Le premier baromètre a été inventé par
l’italien Evangelista Torricelli en 1644. Il remplit de mercure un tube de verre d’un mètre de long, ferme à
une extrémité. Il le retourne et le plonge dans une cuvette remplie de mercure. Il constate alors que le
niveau de mercure dans le tube s’abaisse, laissant un espace de vide au-dessus de lui. Il vient de découvrir
la pression atmosphérique.
Données : g = 9.8 N.kg −1 ; ρHg = 13, 546.103 kg.m−3
Figure 2.2
2.3.1
Forces d’un fluide sur une paroi verticale
Figure 2.3
1. Hypothèses :
→
−
• La paroi verticale possède un axe de symétrie (G, Y ), où G est son centre de surface.
14
• D’un coté de la paroi il y a un fluide de force volumique f~V , de l’autre coté, il y a de l’air à la
pression atmosphérique Patm . On désigne par PG la pression au centre de surface G du coté
fluide.
2. Forces de pression sur une pario plan
Connaissant la pression PG au point G, la pression PM au point M est déterminée en appliquant
la relation fondamentale de l’hydrostatique : PM − PG = −ρgy. La force de pression sur la pario
verticale est :
→
−
→
−
F = PG S X
(2.10)
3. Détermination du point d’application d’une force hydrostatique
→
−
Si F est la force hydrostatique qui s’exerce sur la surface S, alors il est possible de conaître son
point d’application (P ). Ce point s’appelle centre de poussée, ce point est tel que :
−
→
−−→ →
−
MG = GP ∧ F =
2.4
Z
−−→
→
−
GM ∧ d F
(2.11)
Théorème de Pascal
Enoncé :
Dans un fluide incompressible en équilibre, toute variation de pression en un point entraîne la même
variation de pression en tout autre point.
En d’autres termes, toute variation de pression en un point d’un fluide incompressible en équilibre, se
transmet entièrement en tout point du fluide.
Démonstration
Considérons deux cylindres de sections S1 et S2 (S1 << S2 ) relié par un tube, dans lesquels se trouve un
fluide incompressible, voif figure 2.4.
B
O A
Z2
h2
Z1
h1
Figure 2.4
L’application de l’équation de l’hydrostatique entre les points d’ordonnées Z1 et Z2 donne :
15
• État initial :
P2 − P1 = −ρ(Z2 − Z1 )
(2.12)
• État final :
(P2 + ∆P2 ) − (P1 + ∆P1 ) = − ρ [(Z2 − ∆Z2 ) − (Z1 − ∆Z1 )]
⇒ ∆P2 − ∆P1 = − ρ(∆Z2 − ∆Z1 )
(2.13a)
(2.13b)
avec ∆Z2 − ∆Z1 = 0 ⇒ ∆P2 =∆P1
2.5
(2.13c)
Poussée d’Archimède
Dans un champ de pesanteur vertical et uniforme caractérisé par une accélération de la pesanteur g, la
pression évolue avec l’altitude z. On veut évaluer l’effort exercé sur un solide immergé (s), c’est-à-dire la
force totale exercée par le fluide sur ce solide occupant un volume V totalement ou partiellement immergé
→
−
dans le fluide. Le poids du solide est P = m~g , si le solide est homogène avec une masse volumique ρs
→
−
alors ce poids s’écrit P = ρs V.~g .
Solide
FA
G
Z
P
Fluide
P
ρ
(b)
(a)
Figure 2.5
Dans la figure 2.5 (b) ci-dessus, le solide est en partie immergé, et on applique le PFD à l’équilibre, on
aura :
→
−
→
−
→
−
F A + P = 0 ⇒ FA = P .
(2.14)
Cette signifie que le fluide caractérisé par sa masse volumique ρ exerce sur le solide s une force dont le
module est égale au poids du volume du fluide déplacé (ou volume immergé du corps). On écrit :
FA = ρVd .g = ρS.Zb g
(2.15)
Enoncé :
Dans une situation d’équilibre, tout corps plongé dans un fluide au repos subit une poussée verticale
ascendante qui est égale au volume de fluide déplacé.
16
Chapitre 3
DYNAMIQUES DES FLUIDES
Objectifs
À l’issue de ce chapitre, l’Étudiant doit être capable de :
X Formuler les principes de conservation de la masse et de la quantité de mouvement.
X Présenter les théorèmes de Bernoulli.
X Appliquer le théorème des quantités de mouvement au calcul de la résultante globale des efforts
exercés par un fluide sur un corps immergé.
La dynamique des fluides associe l’écoulement d’une particule fluide aux actions qui lui sont infligées.
Pour simplifier le problème, on néglige les frottements entre les couches de fluide glissant les unes sur les
autres ; on parle alors de fluide parfait. On s’intéresse dans ce chapitre aux équations fondamentales qui
régissent la dynamique des fluides parfaits incompressibles à savoir :
• la conservation de la quantité de mouvement (théorème d’Euler)) ;
• la conservation de l’énergie (théorème de Bernoulli)
• Le théorème d’Euler (Conservation de la quantité de mouvement).
3.1
D’finitions
1. Débit d’un fluide
Si ∆V est le volume de fluide qui a traversé une section droite de la conduite pendant le temps ∆t,
par définition le débit volumique, noté QV est le volume du fluide traversant une surface par unité
de temps :
QV =
dV
∆V
=
(m3 s−1 )
dt
∆t
(3.1)
2. Relation débit-vitesse
→
−
→
−
Considérons un fluide traversant la section S avec une vitesse U dans une conduite (voir figure
??), le débit volumique du fluide peut être exprimé en fonction de sa vitesse découlement par :
QV =
→
− →
−
dV
dx
=S
= U.S = − S · U
dt
dt
17
(3.2)
3. Équtaion de continuité ou conservation du débit :
Le débit du fluide s’écoulant par unité de temps à travers n’importe quelle section est constante, et
donc pas de perte de masse. Le débit entrant = débit sortant :
Q1 = Q2
→
− →
−
→
− →
−
S 1· U 1 = S 2· U 2
(3.3b)
S1 U1 = S2 U2
(3.3c)
3.2
Équation fondamentale de la dynamique des fluides parfaits
3.2.1
Accélération d’une particule fluide (Accélération particulaire)
(3.3a)
→
−
Soit U (t, x, y, z), la vitesse de la particule fluide la dérivée de ce vecteur peut s’écrire :
~a =
→
−
→
−
→
−
→
−
−
∂U
∂x ∂ U
∂y ∂ U
∂z ∂ U
d→
U (t, x, y, z) =
+
+
+
dt
∂t
∂t ∂x
∂t ∂y
∂t ∂z
→
−
−
∂U
∂x ∂
∂y ∂
∂z ∂ →
=
+
+
+
U
∂t
∂t ∂x
∂t ∂y
∂t ∂z
→
−
→
− →
− →
−
∂U
+ U · ∇ U.
=
∂t
(3.4a)
(3.4b)
(3.4c)
D’où l’accélération de la particule fluide est une dérivée particulaire du champ de vitesse :
~a =
→
−
→
−
→
− →
− →
−
dU
∂U
=
+ U ·∇ U
dt
∂t
(3.5)
On pourra montrer, à titre d’exercice, que l’accélération d’une particule fluide peut se mettre sous la
forme :
→
−
−→
−
− →
−
∂U
1→
−→→
+ ∇ U 2 + rot U ∧ U
~a =
∂t
2
(3.6)
Par conséquent, l’accélération d’une particule de fluide est la dérivée particulaire de la
vitesse.
3.2.2
Différents types d’écoulements
Dans cette section, nous allons examiner quelques écoulements particuliers ; à savoir :
• l’écoulement stionnaire ;
• l’écoulement incompressible et
• lécoulement irrotationnel.
1. Ecoulement stationnaire ou permanent
Le ρ en un point est constant même si sa valeur peut varier d’un point à un autre. En d’autres termes,
18
→
−
la masse volumique (ρ) et la vitesse du fluide ( U ) ne dépendent pas du temps. Par conséquent, on
peut écrire par exemple :
∂ρ
= 0 et
∂t
→
−
∂U
→
−
= 0.
∂t
(3.7)
2. Ecoulement incompressible
L’écoulement incompressible, aussi qualifiés d’isovolumes, est défini par :
→
−
div U = 0.
(3.8)
Cette condition traduit la conservation du volume d’une particule fluide au cours de son déplacement.
En d’autres termes, translation, rotation et déformation de la particule s’effectuent sans compression
ni expansion de son volume élémentaire.
Remarque :
Le fait que l’écoulement incompressible n’implique pas un fluide incompressible. Cependant un fluide
incompressible (masse volumique constante) implique nécessairement un écoulement incompressible.
3. Ecoulement irrotationnel
On appelle écoulement irrotationnel (ou non tourbillonnaire, sans rotation), un écoulement qui
s’effectu sans rotation. Dans ces conditions, rotationnel de la vitesse est nul ; sinon l’écoulement
sera qualifié de rotationnel (ou tourbillonnaire) :
−
→
− →
−
→
−
−→→
rot U = ∇ ∧ U = 0 .
(3.9)
−
→
−
−→→
Lorsque l’écoulement est rotarionnel (rot U = 0 ), les particules de fluides tournent à une vitesse
angulaire égal à la moitié de la valeur du rotationnel. De manière générale, on définit le vecteur
tourbillon :
→
−
−
1 −→→
Ω = rot U
2
3.2.3
(3.10)
Étude dynamique
Considérons un fluide parfait en écoulement dans un référentiel galiléen. On fait une étude dynamique à
chaque particule de fluide :
~ r, t) à l’instant t, de masse dm = ρ(~r, t)dV .
1. Système étudié : une particule fluide située en S(~
→
−
2. Bilan des forces : F =
Z V
f~V + f~p dV =
Z V
19
→
− ρ~g − ∇p dV .
3. Principe fondamentale de la dynamique :
" →
#
→
−
−
→
− !
Z
→
− U2
− →
−
dU
∂U
−→→
dm =
ρ
+∇
+ rot U ∧ U dV
∂t
2
(V ) dt
V
#
" →
→
− !
−
Z Z
→
− U2
− →
−
→
− ∂U
−→→
⇔
+∇
+ rot U ∧ U dV
ρ~g − ∇p dV =
ρ
∂t
2
V
V
" →
#
−
→
− !
→
−
→
− U2
− →
−
∂U
−→→
⇒ ρ~g − ∇p = ρ
+∇
+ rot U ∧ U
∂t
2
→
−
F =
Z
(3.11a)
(3.11b)
(3.11c)
Ce dernier résultat constitue la consevation de la quantité de mouvement ou « le théorème de quantité de
mouvement » que l’on peut donc énoncer comme suit :
Le flux de quantité de mouvement à travers de la surface fermée d’un volume de contrôle
est égal à la somme des efforts extérieurs appliqués sur le volume de contrôle.
C’est une équation aux dérivées partielles du premier ordre, mais qui s’avére difficile à résoudre en
− →
−
−→→
raison du terme rot U ∧ U . Il est de ce fait nécessaire de recourir à des hypothèses.
3.2.4
Fluides parfaits : équations de Bernoulli
L’équation !de Bernoulli dans sa formulation classique n’est valable qu’aux écoulements stationnaires
→
−
→
−
∂U
→
−
= 0 , incompressibles div U = 0 et sans viscosité. À partir de l’équation conservation de la
∂t
quantité de mouvement, on formule les hypothèses suivantes :
• Le fluide est parfait (non visqueux).
!
→
−
∂U
→
−
= 0 : les trajectoires se confondent aux lignes de courant.
• Écoulement permanent
∂t
• Écoulement incompressible : le long d’une trajectoire la masse volumique reste constant ρ(~r, t) = C cste .
−
→
−
−→→
• Écoulement irrotationnel rot U = 0 .
→
− • Les forces volumiques extérieures dérivent d’une énergie potentielle f~ext,V = − ∇Ep ; c’est le cas
de la le champ de pesanteur.
L’équation de conservation de la quantité de mouvement (3.11c) devient donc :
→
− U2
ρ∇
2
!
→
−
U2
⇒ ∇ ρ
+ p + Ep
2
!
→
−
→
−
= − ∇p − ∇Ep
(3.12a)
→
−
= 0
(3.12b)
En projetant cette équation dans la directions de l’écoulement du fluide. On a :
U2
d ρ
+ p + Ep
2
A
Z B
"
⇒
!
=0
(3.13a)
U2
ρ
+ p + Ep
=0
2
A
(3.13b)
#B
20
⇔ ρ
UA2
U2
+ pA + EpA = ρ B + pB + EpB = Cste avec Ep = ρgh
2
2
(3.14)
Théorème de Bernoulli
Pour un écoulement incompressible et permanent d’un fluide parfait, la quantité
p+ρ
U2
+ Ep = Cte
2
(3.15)
sur chaque ligne de courant ou chaque trajectoire. Pour un fluide plongé dans un champ de pesanteur ~g
(c’est-à-dire Ep = ρgz),
p+ρ
U2
+ ρgz = Cte.
2
(3.16)
La valeur de la constante change d’une gne de courant à l’autre. Le premier terne (p, la pression), représente
2
l’énergie potentielle volumique associée aux forces de pression ; le deuxième terme (ρ U2 ), est l’énergie
cinétique volumique et le dernier (ρgz), représente l’énergie potentielle de pesanteur.
Le théorème de Bernoulli traduit la conservation de l’énergie le long d’une ligne de courant.
Cas particulier du théorème de Bernoulli : fluide au repos
Pour un fluide au repos, U = 0 :
p + ρgz = Cste.
(3.17)
Entre deux positions 1 et 2, on obtient :
3.2.5
P2 − P1 = ρg(z2 − z1 )
(3.18a)
⇒ ∆P = ρg∆Z (c’est le théorème ou loi de Pascal).
(3.18b)
Applications
1. Formule de Torricelli
Considérons un réservoir cylindrique rempli d’un liquide dans lequel on perce un orifice de section
s débouchant à l’air libre. La formule de Torricelli relie le débit d’écoulement avec la hauteur de
liquide h.
z(A)
P0
A
UA
S
h0
h(t)
B UB P
z(B)=0
0
Quel est le temps nécessaire à la vidange totale du cylindre ?
21
On fera les hypothèses suivantes : l’écoulement du liquide est incompressible et stationnaire, le
liquide se comporte en gaz parfait et la section S du cylindre est très grande devant la section de
l’orifice s.
2. L’effet Venturi
Dans un tube horizontal de section S1 variable, l’écoulement d’un fluide en écoulement incompressible
et permanent s’accompagne d’une dépression là où il y’a rétrécissement : c’est l’effet Venturi. La
S1
S2
P1
F Patm
V2
Patm
V1
Figure 3.1 – Illustration de l’effet Venturi.
figure ci-dessus représente un piston qui se déplace sans frottement dans un cylindre de section
S1 et de diamètre d1 = 4 cm remplit d’un fluide parfait de masse volumique ρ = 1000 kgm−3 . Le
→
−
→
−
piston est poussé par une force F d’intensité 62, 84 N à une vitesse V 1 de module constant. Le
fluide peut s’échapper vers l’extérieur par un cylindre de section S2 et de diamètre d2 = 1 cm à une
→
−
vitesse V 2 et une pression P2 = Patm = 1 bar.
(a) En appliquant le principe fondamental de la dynamique au piston, déterminer la pression P
du fluide au niveau de la section S1 en fonction de F , Patm et d1 .
(b) Ecrire l’équation de continuité et déterminer l’expression de la vitesse V1 en fonction de V2 .
(c) En appliquant l’équation de Bernoulli, déterminer la vitesse d’écoulement V2 en fonction de
P1 , Patm et ρ.
On suppose que les cylindres sont dans une position horizontale (z1 = z2 ).
(d) En déduire le débit volumique Qv.
3.3
Dynamique d’un fluide réel : équation de Navier-Stokes
L’introduction des effets de viscosité dans l’équation de conservation de la quantité de mouvement
conduit l’équation de Navier-Stokes. Pour un fluide incompressible newtonien, la dynamique de l’écoulement
vérifie l’équation :
" →
−
#
→
→
−
→
−
− →
− →
−
∂U
ρ(~r, t)
+ U · ∇ U = f~ext,V − ∇p + µ∆ U
∂t
(3.19)
où l’on peut introduire la viscosité cinématique ν = µρ (m2 /s).
3.3.1
Nombre de Reynolds
La présence dans l’équation de Navier-Stokes d’un terme non linéaire et d’un terme du second ordre (le
terme de viscosité), rend cette équation difficile à résoudre. L’idéal c’est de négliger l’un des deux termes
devant l’autre. On définit alors un facteur sans dimension, qui estime l’importance du terme convectif
22
devant le terme de viscosité. lorsque la viscosité prédomine, on a :
w →
w →
w
w →
w
− →
−w
− →
−w
→
−w
U2
U
w − →
w
w −w
w − →
w
w
w
et wµ∆ U w ≈ µ 2
wρ( U · ∇) U w = µ w∆ U w avec wρ( U · ∇) U w ≈ ρ
D
D
(3.20)
D’où, on définie nombre sans dimension appelé Nombre de Reynolds (Re), tel que :
w →
− →
−w
w − →
w
wρ( U · ∇) U w
ρD
w
=
Re =
U
→
−w
w
w
µ
wµ∆ U w
(3.21)
Considérons un courant d’eau qui circule dans une conduite à section circulaire. On introduit un filet de
colorant dans l’axe de cette conduite. En fonction de la vitesse d’écoulement de l’eau, on peut observer les
phénomènes suivants :
— Régime laminaire : le fluide s’écoule en couches cylindriques coaxiales ayant pour axe le centre
de la conduite ; Re < 2000.
— Régime transitoire : c’est une transition entre le régime laminaire et le régime turbulent ;
Re > 3000
— Régime turbulent : Formation de mouvement tourbillonnant dans le fluide ; 2000 < Re < 3000.
C’est une expérience réalisée par Reynolds en faisant varier le diamètre de la conduite, la température,
le débit, etc... pour divers fluides.
Sens physique du nombre de Reynolds « Re ».
Nous avons vu qu’une particule fluide dans un fluides en écoulement, est en générale de deux types de
forces :
→
−
→
−
→
−
dU
dU
• les forces d’inetie (extérieures) dont la résultante F ext = m
= ρV
:
dt
dt
— les forces à distance et
— les forces de pression.
→
−
→
−
dU
• les forces de frottement F µ = µ.S
, si le fluide est visqueux et que l’écoulement s’éffectue
dx
suivant l’axe (Ox).
Le rapport du module de ces deux forces :
Fext
ρ.U.D
=
= Re
Fµ
µ
(3.22)
où D est diamètre intérieur de la conduite (ou l’épaisseur du fluide qui s’écoule) en (m).
3.4
Pertes de charge
3.4.1
Charge
Dans un fluide réel (ou visqueux) les frottements entre couches moléculaires et contre la paroi, qui ont
lieu pendant l’écoulement permanent, entraînent une perte de charge, notée ∆Pt . Cette perte de charge
23
(ou d’énergie) sous forme de chaleur est une résistance à l’écoulement.
Basons nous sur l’équation de Navier-Stokes obtenue pour un fluide newtonien (réel) incompressible :
→
−
→
−
→
−
→
−
dU
ρ
= − ∇Ep − ∇p + µ∆ U
dt
(3.23)
→
−
En multipliant scalairement par la vitesse ( U ) la relation (3.23), on a :
→
−
→
− dU
→
− →
−
→
−
→
−
ρU ·
= U · − ∇Ep − ∇p + µ∆ U
dt
−2
→
− →
−
→
−
→
−
d 1 →
ρU
= U · − ∇Ep − ∇p + µ∆ U
dt 2
→
−
→
− ∂U
→
− →
− 1 →
−2
→
− →
−
→
−
→
−
ρU ·
+U ·∇
ρU
= U · − ∇Ep − ∇p + µ∆ U
∂t
2
→
−
→
− →
− 1 →
−2
→
− →
−
→
−
→
−
∂U
→
−
avec
= 0 ⇒ U ·∇
ρU
= U · − ∇Ep − ∇p + µ∆ U
∂t
2
→
−
→
− 1 →
−
⇒ ∇
ρ U 2 + ρgZ + p = µ∆ U
2
|
{z
(3.24a)
(3.24b)
(3.24c)
(3.24d)
(3.24e)
}
Pt
D’où :
→
−
→
−
∇Pt = µ∆ U
(3.25)
−
1 →
Pt = ρ U 2 + ρgZ + p est la pression totale, encore appelée la charge et qui est equivalent en hauteur
2
de la colonne d’eau :
→
−
Pt
1 U2
p
H=
=
+Z +
(3.26)
ρg
2 g
ρg
3.4.2
Ecoulement de Poiseuille (loi de Poiseuille)
Considérons l’écoulement d’un fluide visqueux dans un long tube cylindrique de rayon R et de longueur
L R. Le tube est horizontal (orienté suivant Oz) et l’écoulement est assuré grâce à l’existence d’une
différence de pression (∆p) entre l’entrée du tube et la sortie du tube. Hypothèses simplificatrices travail :
Figure 3.2 – Ecoulement Poiseuille.
→
−
• Fluide incompressible div U = 0 ;
→
−
∂U
→
−
• Ecoulement permanent (
= 0 );
∂t
• Ecoulement laminaire (Re < 2000) ;
→
−
• L’écoulement est parallèle à Oz et symétrie de révolution autour de l’axe r = 0, d’où U = v(r, z)~ez ;
24
• Ecoulement induit par gradient de pression constant ∆p établi entre l’entrée et la sortie de la
conduite de longueur L.
À partir de ces hypothèses, on peut écrire :
→
−
→
−
→
−
∂ U (r, z)
div U =
= 0 ⇒ U = U (r)~ez
∂z
(3.27)
Le fluide se déplace dans un tube cylindrique, alors l’opérateur ∆ s’écrit en coordonnées cylindriques.
Dans ces conditions, l’équation (3.25) peut s’écrire :
d
dPt
1 d
r U (r) = Cste = A
=µ
dz
r dr
dr
(3.28)
1. Calcul du champ de vitesse, c’est-à-dire la répartition des vitesses à l’intérieur d’une
conduite.
1 d
d
A 2
µ
r U (r) = A ⇒ U (r) =
r + B ln(r) + C
r dr
dr
4µ
(3.29)
Conditions aux limités :
— Au contact avec la paroi : r = R et U (R) = 0, l’équation (3.29) devient :
U (R) =
A 2
R + B ln(R) + C = 0
4µ
(3.30)
— En posant r = 0, on trouve :
U (O) = Umax = B ln(0) + C
⇒ B=0
(3.31)
Ces deux conditions permettent de trouver C, tel que :
C = Umax = −
A 2
R > 0 ⇒ A < 0;
4µ
(3.32)
ce qui permet d’écrire :
→
−
A 2
U = U (r) = −
R − r2 ~ez .
4µ
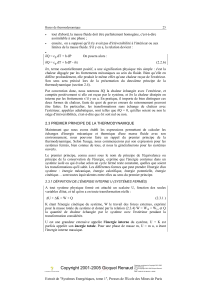
Le profil de vitesse est donc parabolique.
Figure 3.3 – Profil de la vitesse : écoulement Poiseuille
2. Calcul de la variation de la charge (∆Pt )
25
(3.33)
D’après l’équation (3.25), on a :
dPt
= A ⇒ ∆Pt = AL < 0
dz
(3.34)
Ce qui traduit que la charge diminue avec la progression du fluide ; on dit que il y a perte de charge
(notée ∆Pt ). Pour évaluer la perte de charge il faut déterminer la constante A.
3. Calcul du débit volumique QV :
→
− →
−
πA
QV =
U · dS = −
2µ
8µ
⇒ A = − 4 QV
πR
ZZ
Z R
0
(R2 − r2 )rdr =
π R4
A
8µ
(3.35a)
(3.35b)
Les relations (3.32) et (3.35b) permettent d’écrire :
A=−
8µ
4µ
Umax = − 4 QV
2
R
πR
(3.36)
On obtient ainsi la formule de Poiseuille :
|∆Pt | =
128 µ
QV
πD4
L.
(3.37)
Cette relation montre que la perte de charge est proportionnelle à la distance parcourue ; ce qui
traduit que la perte de charge est régulière.
La vitesse moyenne (notée Um ), encore appelée vitesse débitante, est la vitesse uniforme qui
donnerait le même débit : QV = U S. Elle est la moitié de Umax :
Umax
1
A
A
K 2
32µ
Um =
=
− R2 = − R2 = −
D ⇒ A = − 2 Um .
2
2
4µ
8µ
32µ
D
(3.38)
La formule de Poiseuille s’écrit alors :
|∆Pt | =
32µ L
Um
D2
(3.39)
4. Coefficient de perte de charge
D’une manière générale, la perte de charge correspond à la pression additionnelle à imposer entre les
extrémités d’une canalisation pour assurer un écoulement stationnaire et compenser le frottement
visqueux. Dans la détermination des pertes de charge, deux situations peuvent se présenter et qu’il
faut en ternir compte :
• Les frottements du fluide sur la paroi interne de la tuyauterie (ou de la conduite) ; on les
appelle pertes de charge régulières ou systématiques.
• La résistance à l’écoulement due aux accidents de parcours (coudes, élargissements ou rétrécissement de la section, organes de réglage, etc.) ; ce sont les pertes de charge accidentelles ou
26
singulières.
A. Les pertes systématiques
Si l’on exprime |∆Pt | en fonction du nombre de Reynolds, on aura :
|∆Pt | =
2.32 ρ 2
32µ L
1 64 L 2
λ L
Um =
.U L =
. ρU = . ρU 2
ρD
D2
2 m
D Re 2 m D 2 m
Um
µ
|∆P t| =
λL 2
λL 2
ρUm (P a) ou en |∆h| =
U (mCF )
2D
2gD m
(3.40)
(3.41)
où
— D est le diamètre de la conduite ;
64
, le coefficient sans dimension appelé coefficient de perte de charge régulière d’un
Re
écoulement laminaire en conduite ;
— λ=
— ρ, la masse volumique du fluide.
— L (m), la longueur entre deux points parcourue par le fluide ;
— ∆h, la perte de charge exprimée en mètres de colonne de fluide (mCF ) ;
— g, l’intensité de la pesanteur.
La perte de charge est due aux frottements visqueux qui nécessité de fournir constamment
de l’énergie au fluide, à l’aide d’une pompe, d’une puissance pour maintenir un écoulement
permanent.
B. Les pertes de charge singulières
La présence d’une singularité (d’un obstacle) sur l’écoulement dans une conduite comme un
coude, un diaphragme, un élargissement brusque, une contraction, etc. crée une différence
pression (|∆Pt ) locale appelé perte de charge singulière. Dans la pratique industrielle,
cette perte de charge est écrite sous la forme :
1 2
|∆Pt | = K ρUm
(P a)
2
ou
∆h = K
U2
(mCF )
2g
(3.42)
où le coefficient de perte de charge K, qui dépend de la géométrie et du nombre de Reynolds, est
donné dans des formulaires appelés « dictionnaires de pertes de charge ». Quelques singularités
typiques sont reproduites ci-dessous.
27
Figure 3.4 – Image tirée du document de Chantal Meuris et al. [4]
On peut alors généraliser l’équation de Bernoulli :
Figure 3.5 – Image tirée du document de Chantal Meuris et al. [4]
X L 1
X
1
1
λi i ρUi2 +
Kj ρUj2
pA − pB + ρg(ZA + ZB ) + ρ(UA2 − UB2 ) =
2
D
2
2
i
i
j
28
(3.43)
Bibliographie
[1] Sakir Amiroudine, Jean-Luc Battaglia, (2011) Dynamique des fluides, Dunod, Paris.
[2] Riadh BEN HAMOUDA, (2008) NOTIONS DE MECANIQUE DES FLUIDES, Centre de Publication
Universitaire.
[3] Billy, N., Desbois, J., Duval, M., Elias, M., Monceau, P., Plaszczynski, A., and Toulmonde, M. (2004)
CAPES de Sciences physiques, Tome 1-Physique cours et exercices. Éditions Belin, Paris.
[4] Chantal Meuris, Dapnia Sacm, (MÉCANIQUE DES FLUIDES CEA/Saclay
[5] Patrick CHASSAING, Mécanique des fluides-Éléments d’un premier parcours, Collection Polytech.
Sébastien CANDEL, Mécanique des fluides, Dunod Paris.
29