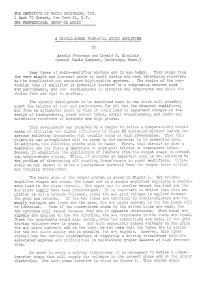
Investigations in to Induction Motor Drive using Slip Power Recovery Scheme with GTO Inverter and Chopper Sita Ram*1, O. P. Rahi*2, Veena Sharma*3, and K. S. R. Murthy*4 1 *EED NIT Hamirpur (HP), India. srbhrdj@gmail.com, 2oprahi2k@gmail.co.in, 3veenanaresh@gmail.com, and 4harikella96@gmail.com Abstract—Induction motors are used as industrial drive due to their rugged and simple construction as well as low maintenance. The speed control of slip ring induction motor (SRIM) is accomplished by slip power recovery scheme consisting of inverter control, chopper control, and rotor resistance control techniques. This article presents the improvement in the performance characteristics of SRIM drive offered by GTO inverter and buck-boost chopper based slip power recovery scheme (SPRS). The simulation model of a 2 hp SRIM drive using Silicon controlled rectifier (SCR) and gate turned off (GTO) inverter control and GTO based buck-boost chopper control has been established in the SIMULINK environment. The simulation results using inverter control and chopper control have been analyzed and compared. The power factor, efficiency and total harmonic distortion have been taken as parameters for analyzing the enhancement in the performance of the SRIM drive. The simulation results have shown that GTO based inverter chopper controlled SPRS has higher power factor, efficiency and lower THD compared to SCR inverter controlled SPRS. Keywords—chopper; GTO; efficiency; induction motor; power factor; SCR; slip power recovery scheme; I. INTRODUCTION Slip ring induction motor (SRIM) are used in the industrial field where the drive operation is intermittent i.e. hoists, cranes, conveyers, and lifts because the slip power can be easily controlled by slip rings. The slip power recovery scheme (SPRS) controls the speed of SRIM by sending back the feedback power to the supply mains thereby improves the efficiency of the SRIM drive [1]. SRIM drive operates at limited speed range and has slip power a smaller part of motor power rating, hence low rating of converter and lower cost [2]. The researchers are drawing more interest in the field of renewable energy sources because of advancement in the static converters technology [3-4]. The major setback of SPRS has been found to be as i) poor power factor of the supply, ii) requirement of higher reactive power and iii) high harmonic components [5-6]. The existence of harmonic contents produced the distortion in the supply source. In literature numbers of methodologies [7] have been reported to improve the performances of the slip power recovery drive (SPRD). A methodology employing buck chopper has operated the inverter at most secure firing angle and decrease the reactive power consumption of inverter in 978-1-5386-4318-1/17/$31.00 ©2017 IEEE this manner improve the power factor and efficiency of SRIM drive [8]. The different circuit configurations of PWM inverter and boost chopper have been utilized in the DC link of SPRS to control active and reactive power and also decrease the harmonics of rotor side [9, 10]. The utilization of boost/buckboost chopper has replaced one of the insulated gate bipolar transistor (IGBT) converters from the rotor circuit side by silicon controlled rectifier (SCR) converter and decreases the cost of SPRS with the same performance indices of induction machine [11]. Theoretically the mathematical model has been drawn to evaluate the DC link of SPRD [12]. A twelve pulse SCR inverter with IGBT boost chopper has been exercised to enhance the power factor, while SPRD utilizing voltage source inverter (VSI) and boost chopper applying voltage control technique and current control technique decrease the total harmonic distortion (THD) of source and improved the power factor [13-15]. A SPRD system using buck converter and inverter with three PWM techniques in the intermediate circuit has been used with LC filter to decrease the harmonic contents of supply source [16]. The inverter configuration with stepdown and step-up/down chopper has enhanced the power factor and efficiency of the SRIM drives and quality of power supply [17, 18]. II. MATHEMATICAL MODELING OF SPRS This part of the section describes the mathematical modeling of conventional SPRS. A. Circuit Model of the Conventional SPRS In the SPRS shown in “Fig. 1,”, the three phase full-wave diode bridge rectifier is connected to the rotor windings through slip rings and converts the slip power in to DC. R Y B Three Phase Supply M L Induction Motor Recovery Transformer Id Speed D1 D 3 D 5 S2 D4 Vd1 D6 D 2 T1 T3 T5 T4 T6 T2 Vd2 S1 (90° < α < 180°) Rotor Resistance Starter Diode Bridge Inverter Bridge Fig. 1. Schematic diagram of SPRS using SCR inverter bridge A three-phase natural commutated SCR inverter inverts the DC power into line frequency AC and feedback the same to the source which can be controlled by controlling the inverter emf Vd 2 , by varying the firing angle of the inverter. The DC link inductor Ld in the intermediate circuit reduces the swells in DC link current I d and the transformer match the voltages Vd 1 and Vd 2 by taking a suitable turns ratio. Ignoring the stator and rotor drops, 3 2 Vd 1 S u sV sV 1.35 u n n 3 2 V V u cos D 1.35 u cos D S m m Vd 2 (1) (2) where Vd 1 and Vd 2 are the diode bridge and inverter-bridge output voltages, D = the inverter firing angle, m = the turns ratio of transformer from source to converter side, n = the turns ratio of induction motor from stator to rotor side, s = the slip, V = the input voltage. Extreme value of D is confined to 165 q for secure commutation of thyristors. The desired speed can be obtained with proper choice of D [19]. The equations for slip, DC link current, air gap power, and electromagnetic or developed torque are given by (3), (4), (6) and (10) below [18] s Id n cos D m Vd 1 Vd 2 2( sRs' Rr ) Rd Vd 2 I d 1.35 u 1.35 Pm (4) Vd 2 V cos D u I d m (5) Pm Td u Zm 1 s 2 p The electromagnetic torque is given by p Pg u Td 2 Zm (7) (8) Rdc (14) 3( X sc X r ) ½ ­ ®2 Rsc ¾ s Rr Rd S ¯ ¿ (15) R Y (9) where, I dc is DC link current, Rs' is stator resistance referred to rotor side, Rr is rotor resistance, Rd is resistance of DC link (13) where, G = duty ratio of chopper and Rdc = the DC link circuit resistance that can be expressed as [13] B From equations (7) and (10), electromagnetic torque can be written as § p · 1.35V u Id Td ¨ ¸ (10) © 2 ¹ n u Zm (12) Vd 1 Vd 2 Rdc Id (6) Td u Zr § G ·V 1.35 ¨ ¸ cos D © 1 G ¹ m n§ G · ¨ ¸ cosD m © 1 G ¹ s V u Id n 1 s Pg B. Model of Proposed SPRS using GTO Inverter and BuckBoost Chopper The shortcoming of the conventional SPRS is the large reactive power consumption of the inverter from the source when firing angle increases above 90°, which reduces power factor and enlarge the total harmonic distortion (THD) of the source. To sort out this problem the proposed scheme has introduced the buck-boost chopper controller as shown in “Fig. 2,” which control the motor speed by duty ratio control and setting the firing angle to a value drawing minimum reactive power from the source. In this way the proposed scheme decreases the reactive power drawn from the source by the inverter consequently, improve the source power factor and reduced the THD of the source current. (3) From equations (4) and (6) Pg Equation (11) indicates that the torque is directly proportional to DC link current and the magnitude depends upon the difference between the Vd 1 and Vd 2 . Therefore torque speed characteristics of SRIM drives are nearly linear as that of separately excited DC motor for a particular constant value of firing angle α. Taking in to consideration the DC link equivalent circuit of “Fig. 2,” the DC voltage of inverter, slip and DC link current can be written as [18] Neglecting copper loss sPg inductor, Pg is power in the air gap, Td is electromagnetic torque, Pm is mechanical power developed, Zm and Zr are the synchronous speed and rotor speed in rad/sec, p is no of poles [20]. Induction Motor Three Phase Supply Recovery Transformer L Id M Speed S2 S1 D1 D 3 D 5 Vd1 D4 D6 D 2 S1 Lc IGBT Dc2 T1 S2 Dc1 IGBT C Vc T3 T5 Lf Vd2 Rotor Resistance Starter Diode Bridge Buck-Boost Chopper T4 T6 Cf T2 Inverter Bridge LC Filter Fig. 2. Schematic diagram of SPRS employing SCR inverter with buck-boost chopper Air gap power, motor torque, and power factor are given by Firing Angle Pulse Generator 95 Mean In alpha_deg a sPg Vd 2 I d Pg (16) s Gain speed in rpm powergui ir_abc Cm + Discrete, Ts = 5e-006 s. -K - Motor Measurement c Vd 2 I d Mean Value Firing Pulses Pulse b is _abc i - m wm Sm Te Scope 1 Ss Torque 10 m Tm Filter [A] T Zm Vd 2 I d (17) sZm Cs i + - Goto Pg cosI = ( Ps Pr ) (Qs Qr ) 2 a B b C c g p a b c N Induction Motor + A B Vb C Diode Bridge i - Vc + [B] (18) + - V Mag_V_I Gain 2 [A] From 1 magnitude signal angle Fourier 1 c Transformer V I P_Q Source Reactive Power Discrete Active & Reactive Power 1 Source Active Power 1 T2 Source Active Power Mag_V_I v P_Q Discrete Active & Reactive Power 2 Feedback Current (Amps) Gain 1 Source Current (Amps )1 Source Reactive Power 1 [B] From 6 -K - magnitude signal angle Fourier T1 Gain 3 -K T sin(u) cos(u) sin(u) -K - b C v I where X sc = reactance of stator referred to rotor side and X r = reactance of rotor respectively. Ps = active power and Qs = reactive power consumed by inverter and motor from the supply source. Pr = active power recovered by inverter and Qr = reactive power taken/recovered by the inverter from the supply source and is written as + - Sfb Primary Voltage 2 a B T3 Primary Voltage 1 Cfb Goto 1 2 A - Inverter Bridge Va ( Ps Pr ) A Cos cos(u) Cos1 Feedback power factor Source power factor Fig. 3. Circuit model of SPRS employing SCR inverter without chopper The rotor speed in rad/sec can be determined by [20] N (25) Zr 2S u r 60 Pr § G 1.35V ¨ © 1 G · ¸ cosα u I d ¹ (19) Qr § G 1.35V ¨ © 1 G · ¸ sinα u I d ¹ where, TL = load torque in Nm , N r = rotor speed (rpm), K1 = the %age efficiency. (20) Proposed model of SPRS shown in “Fig. 4,” is simulated in SIMULINK. The speed of SRIM is varied by varying dutyratio δ from 80%-30% at an interval of 3% and fixing the firing angle of inverter at α = 91°. The observed results have been plotted as shown in “Fig. 10,”–“Fig. 14,”. Equation (20) shows that the reactive power drawn from the source can be decreased by decreasing duty ratio keeping firing angle fixed which in turn increases the power factor as represented by equation (18). Hence the proposed scheme improves the power factor. III. MODELING AND SIMULATION OF SPRS The SPRS employing the SCR inverter as shown in “Fig. 3,” has been simulated in Simulink. The measurement blocks like Fourier block, and discrete block have been used to measure the speed, rms value of current, power factor of the current and the active and reactive power drawn from the source. The model of SRIM of rating 2 hp, 415V, 50Hz, 1430 rpm has been simulated employing SCR inverter bridge. The model is running on MATLAB and different observations are plotted as shown in “Fig. 5,”-“Fig. 9,” at various firing angle α of the inverter bridge. The efficiency and input-output powers can be described as in (22)-(25) below. The percentage efficiency of SRIM can be expressed as Pout K1 u100 (21) Pin Pfb where, Pin = power input (W) and Pfb = power feedback (W) and can be calculated as Pin 3 u Ps (22) Pfb 3 u Pfbc (23) where Ps = source active power/phase (W) and Pfbc = feedback power/phase measured (W) from the measurement blocks, additionally the mechanical power at the shaft (W) can be expressed by Pout Zr u TL (24) Fig. 4. Circuit Model of SPRS employing GTO inverter and buck-boost chopper IV. SIMULATION RESULTS AND DISCUSSION This section includes the simulation results obtained from Simulink of 2 hp SRIM. The results of “Fig. 5,”–“Fig. 9,” show the characteristics of SRIM using SPRS with SCR inverter control technique. A. Firing angle vs. speed Simulation has been carried for one second and constant load of 8 Nm was applied to the SRIM. The variations of speed by varying the firing angle obtained from simulations have been shown in “Fig. 5,”. The simulation results have shown that with the increase in firing angle the rotor speed decreases and vice versa. B. Firing anggle vs. feedback power Simulation results for inverter firing angle and feedback power have been shown in “Fig. 6,”. The result indicated that as the firing angle increases the feedback power also increases. For the constant load increase in feedback power, decreases the power drawn from the source consequently, enhance the efficiency of the drive. C. Firing angle vs. source power factor The graph of firing angle and source power factor has been shown in “Fig. 7,”. From the graph it is clear that there is decrease in source power factor with increase in firing angle, of inverter. From the simulation results the average value of power factor is found to be 0.72. Fig. 8. Graph of firing angle vs. efficiency D. Firing angle vs. efficiency The graph of firing angle and efficiency has been shown in “Fig. 8,”. From the graph it is evident that as the firing angle increases the efficiency increases. The average value of efficiency recorded as 84.3%. The increase in firing angle increases the feedback power which in turn reduces the power drawn from the source for constant load hence increases the efficiency. Fig. 5. Graph of firing angle vs. speed Fig. 9. Graph of firing angle vs. THD E. Firing angle vs. THD “Fig. 9,” shows the variations of the THD for different firing angles of inverter. It has been observed from the graph that with the increase in firing angle of inverter, THD of the supply increases in case of inverter control. It is seen that the increase in firing angle above 90°, the inverter increases the reactive power consumption of inverter resulting in increase in THD of the supply. The average value of THD recorded from simulation results is 42.54%. The characteristics of SPRS with GTO inverter and chopper control technique obtained from Simulink environment for 2 hp SRIM drive have been shown in “Fig. 10,” –“Fig. 14,”. F. Duty ratio vs. speed The graph of duty ratio and rotor speed has been shown in “Fig. 10,”. From the graph it has been observed that the increase in duty ratio increases rotor speed and vice versa. Fig. 6. Graph of firing angle vs. feedback power Fig. 7. Graph of firing angle vs. source power factor G. Duty ratio vs. feedback power The variation of feedback power with respect to duty ratio has been shown in “Fig. 11,”. The feedback power increases with decrease in duty ratio. The rate of increment in feedback power shown by “Fig. 11,” (duty ratio control) is more than by “Fig. 6,” (firing angle control). Hence chopper control technique has better efficiency. H. Duty ratio vs. source power factor The graph between duty ratio and source power factor has been shown in “Fig. 12,”. Source power factor decreases with the decrease in duty ratio, but the slope of this graph is less compared to graph shown in “Fig. 7,”. This is because the chopper control reduces the reactive power consumption of the inverter and increases the active feedback power to the source, so has higher power factor. In this control technique the average power factor is recorded as to be 0.89. increases as duty ratio decreases because more power is feedback to the source. The average value of efficiency using chopper control is found to be 87.55%. Fig. 10. Graph of duty ratio vs. speed J. Duty ratio vs. THD The variation of THD with respect to duty ratio has been shown in “Fig. 14,”. THD increases with decrease in duty ratio and average value is found to be 5.29%. But the increase in THD is less compared to inverter control method shown in “Fig. 9. Hence chopper control has reduced the THD by a margin of 87.56% from inverter control. The comparative graph of power factor and efficiency using inverter and chopper control methodologies have been illustrated by “Fig. 15,” and “Fig. 16,”. “Fig. 17,” shows the comparative graph of THD without and with chopper controller. The results have been compared based on the equal speed range and load torque for SRIM drive. Fig. 11. Graph of duty ratio vs. feedback power K. Speed vs. source power factor The relative graph of speed and power factor for inverter and chopper control techniques have been shown in “Fig. 14,”. Power factor of SCR inverter control has been indicated by cos I1 having average value of 0.67 and chopper control by cos I2 with average value of 0.89. Therefore the chopper control technique enhances the power factor by 32.84% that from the inverter control technique. Fig. 12. Graph of duty ratio vs. source power factor Fig. 15. Graph of speed vs. power factor without and with chopper control Fig. 13. Graph of duty ratio vs. efficiency Fig. 16. Graph of speed vs. efficiency without and with chopper control Fig. 14. Graph of duty ratiovs. THD I. Duty ratio vs. efficiency The graph of duty ratio and efficiency has been shown in “Fig. 13,”. From the graph it is seen that the efficiency Fig. 17. Graph of speed vs. THD without and with chopper control L. Speed vs. efficiency The relative graph of speed vs. efficiency has been shows in “Fig. 15,”. In this graph K1 designates the percentage efficiency of SPRS employing the SCR inverter control having average value of 82% and K 2 the percentage efficiency employing the chopper control having average value of 86.5%. Hence chopper control technique improves the efficiency of the SRIM drive by the margin of 5.48% from the inverter control technique. M. Speed vs. THD The relative graph between speed and THD with inverter and chopper control techniques has been illustrated by “Fig. 16,”. The THD-1 indicates the THD of source with inverter control methodology having average value of 47.63% and THD-2, the THD of source with chopper control having average value of 5.43%. The chopper control has lowered the THD of supply source by a margin of 88.89% from the inverter control technique. V. CONCLUSIONS The performance of SRIM drive has been presented in this paper using SCR inverter control and GTO based inverter with chopper controlled SPRS. The proposed SPRS using inverter control, and chopper control methodologies have been simulated in the simulink. The power factor, efficiency and THD have been taken as parameters to examine the enhancement in performance of SRIM drive. The simulation results have indicated that the GTO inverter and chopper control technique enhances the average power factor by margin of 32.84% and efficiency by 5.48% than by SCR inverter control technique. Similarly the GTO inverter and chopper control technique has decreases the average THD of supply source by 88.89% from the SCR inverter control technique. These results have suggested that the application of SRIM drive using SPRS with GTO inverter and chopper control has superior performances than with SCR inverter control. REFERENCES [1] [2] [3] R. Ajabi-Farshba and M. R. Azizian, “Slip power recovery of induction machines using three-Level T -type converters,” IEEE 5 th Conference on Power Electronics, Drive Systems and Technologies, pp. 483-486, Feb 5-6, 2014. X. Yang, L. Xi, X. Yang, and Jian-guo Jiang, “Research on the application of PFC technology in cascade speed control system,” IEEE 3rd Conference on Industrial Electronics and Applications ICIEA, pp. 1964-1969, 3-5 June, 2008. O. P. Rahi and A. K. Chandel, “Refurbishment and Uprating of Hydro Power Plants-A Literature Review,” Renewable and Sustainable Energy Reviews, vol. 48, pp. 726-737, August 2015. [4] [5] [6] [7] [8] [9] [10] [11] [12] [13] [14] [15] [16] [17] [18] [19] [20] O. P. Rahi and A. Kumar, “Economic Analysis for Refurbishment and Uprating of Hydro Power Plants,” Renewable Energy, vol. 86, pp. 11971204, 2016. A. Lavi and R. J. Polge, “Induction motor speed control with static inverter in the rotor,” IEEE Transaction on Power Apparatus and Systems, vol. PAS-85, pp. 76-84, 1966. W. Shepherd and J. Stanway, “Slip power recovery in an induction motor by the use of a thyristor inverter,” IEEE Transactions on Industry and General Applications, vol. IGA-5, no. 1, pp. 74-82, 1969 . Sita Ram, O. P. Rahi, and Veena Sharma, “A comprehensive literature review on slip power recovery drives,” Renewable and Sustainable Energy Reviews, vol. 73, pp. 922-934, 2017. P. Pilley and L. Refoufi, “Calculation of slip energy recovery induction motor drive behavior using the equivalent circuit,” IEEE Transactions on Industry Applications, vol. 30, no. I. pp. 154-163, January/February 1994. G. D. Marques, “Numerical simulation method for the slip power recovery system,” IEEE Proceedings of Electronic Power Application, vol. 146, no. 1, pp. 17-24, January 1999. G. D. Marques and P. Verdelho, “A simple slip-power recovery system with a dc voltage intermediate circuit and reduced harmonics on the mains,” IEEE Transactions on Industry Electronics, vol. 47, no. 1, pp. 123-132, Feb. 2000. D. Panda, E. L. Benedict, G. Venkataramanan, and T. A. Lipo, “A novel control strategy for the rotor side control of a doubly-fed induction machine,” IEEE Conference Record of 36th Annual meeting of Industry Applications, vol. 3, pp. 1695-1702, 30 September-4 October 2001. A. K. Mishra and A. K. Wahi, “Performance analysis and simulation of inverter fed slip -power recovery drive,” IE (I) Journal-EL, vol. 85, pp. 89-95, Sept. 2004. S. Tunyasrirut, J. Ngamwiwita, V. Kinnares , T. Furuya, and Y. Yamamotod, “A DSP-based modified slip energy recovery drive using a 12-pulse converter and shunt chopper for a speed control system of a wound rotor induction motor,” Electric Power Systems Research, vol. 78, no. 5, pp. 861–872, 2008. S. Tunyasrirut , V. Kinnares, and J. Ngamwiwit, “Performance improvement of slip energy recovery system by a voltage controlled technique,” Renewable Energy, vol. 35, pp. 2235-2242, 2010. S. Tunyasrirut and V. Kinnares, “Speed and power control of a slip energy recovery drive using voltage-source PWM converter with current controlled technique,” 10th Eco-Energy and Materials Science and Engineering Symposium, vol. 34, pp. 326-340, 2013. C. Pardhi, A. Yadavalli, S. Sharma, and G. A. Kumar, “A study of slippower recovery schemes with a buck dc Voltage intermediate circuit and reduced harmonics on the mains by various PWM techniques,” International Conference on Computation of Power, Energy, Information and Communication, pp. 495-499, 2014. S. Ram, O. P. Rahi, V. Sharma, and A. Kumar, “Performance analysis of slip power recovery scheme employing two inverter topologies,” Proceedings of MFIIS, vol. 2, pp. 356-361, 12-13 September 2015. Sita Ram, O. P. Rahi and Veena Sharma, “ Analysis of induction motor drive using buck-boost controlled slip power recovery scheme,” IEEE International Conference on Power Electronics, Intelligent Control and Energy Systems, pp. 1985-1990, 4-6 July, 2016 DTU. G. K Dubey, “Fundamentals of Electrical Drives,” 1995, Narosa Public House Delhi. N. Mohan, T. M. Undeleand, and W. P. Robbin, “Power electronics converters, aplications, and design.” Third Edition, Willey India Pvt. Ltd. New Delhi 2014.