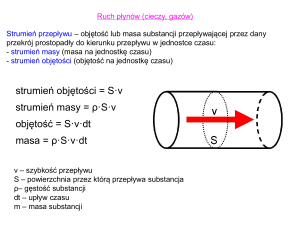
1. Liczba maszynowa. . Liczba zmiennoprzecinkowa Błąd względny. Błąd reprezentacji. Precyzja arytmetyki. Błędy działań. 2. Rodzaje błędów. Algorytmy stabilne numerycznie. 3. Uwarunkowanie zadania numerycznego. Normy macierzy. Wskaźnik uwarunkowania macierzy. 4. Równania nieliniowe. Metoda bisekcji. Metoda stycznych (Newtona) Metoda siecznych. Metoda punktu stałego. 5. Układy równań liniowych. Metody dokładne: Metoda Gaussa. Metody LU: Doolitle’a, Crouta, Choleskiego. Metoda iteracyjna:kolejnych przybliżeń i Seidla. 6. Interpolacja: Lagrange’a Newtona, funkcjami sklejanymi. 7. Aproksymacja wileomianami, trygonometryczna. Metoda najmniejszych kwadratów. 8. Rózniczkowanie numeryczne. Wzory oparte na wzorze Taylora. 9. Całkowanie numeryczne. Całki Newtona Cotesa: wzór trapezu, Simsona, reguła 3/8. Złożone kwadratury Cotesa. Kwadratury oparte o węzły optymalne: Gaussa. Kwadratury z funkcją wagową. 10. Metody optymalizacji. (jednej zmiennej: Metoda złotego podziału, siecznych, Newtona, Wielu zmiennych: Największego spadku, Newtona, Gaussa Sidela. Liczba maszynowa: mająca dokładną reprezentację w komputerze, czyli dająca się zapisać w postaci skończonej sekwencji bitów Liczba zmiennoprzecinkowa: zapisywana z uzyciem notacji naukowej p Liczby dodatnie zapisuje się w postaci (1.m1 m2 , . . . mt )2 · 2 . Reprezentacja licz. Liczby, które nie są maszynowe reprezentujemy w postaci bliższj z liczb maszynowych –(zaokrąglenia w górę i w dół) Błąd względny δ= x−f l(x) x Skąd f l (x) = x (1 + δ ) Gdzie błąd względny |δ | nie przekracza precyzji arytmetyki. Precyzję arytmetyki szacujemy znajdując najmniejszą liczbę większą od 1, odróżnialną maszynowo od 1. Błędy działań f l (x○y) = (x○y) (1 + δ ) 2. Rodzaje błędów – danych wejściowych, reprezentacji, obcięcia, zaokrągleń Algorytm stabilny numerycznie: dla nieco zaburzonych danych zwraca nieco zaburzone wyniki – błędy nie kumulują się nadmiernie i nie powodują bardzo dużego błędu końcowego. 3. Numeryczne uwarunkowanie zadania, to parametr pozwalający ocenić wpływ drobnych zmian parametrów wejściowych na wynik końcowy. Wskaźnik uwarunkowania jako maksymalny stosunek błędu względnego rozwiązania do błędu względnego danych. Problem o niskim wskaźniku uwarunkowania nazywamy dobrze uwarunkowanym, zaś problemy o wysokim wskaźniku uwarunkowania – źle uwarunkowanymi. Zagadnienia o zbyt dużym wskaźniku uwarunkowania nie nadają się do numerycznego rozwiązywania W przypadku zadania rozwiązywania układów Kramera AX=B uwarunkowanie zadanie ocenia się obliczając wskaźnik uwarunkowania macierzy κ = ||A|| · ||||A−1 |||| Gdzie ||A|| jest normą macierzy indukowaną przez normę wektora na przykład: ||A|| = ∑ ||aij || j Równania nieliniowe. Metoda bisekcji – połowienia. Warunek wstępny – funkcja jest ciagła i różnych znaków na krańcach przedziału. Metoda iteracyjna polegajaca na połowieniu przedziału i wywbieraniu jako kolejnego, podprzedziału o połowe mniejszego, na kraćach którego funkcja ma różny znak. Ponieważ długości podprzedziałów zmierzają do zera na pewno jest zbieżna. Metoda stycznych (Newtona) – metoda iteracyjnego wyznaczania miejsca zerowego. Kolejny punkt znajdujemy jako przecięcie z osią OX stycznej do wykresu wyprowadzonej w poprzednim. Aby była zbieżna muszą być spełnione dodatkowe warunki (pierwsza i druga pochodna sytałego znaku) ale za to jest szybko zbieżna. Metoda siecznych ( podobnie ale sieczna zamiast stycznej – opisać) Punkt stały funkcji: ϕ (x) = x Jeśli funkcja spełnia pewne dodatkowe warunki (funkcja zwężająca) to punkt stały można znaleźć iteracyjnie xn+1 = ϕ (xn ) Znajdowanie miejsca zerowego funkcji f metodą punktu stałego: f (x) = 0 Gdy ϕ (x) = f (x) + x = x Można więc zamiast miejsca zerowego f szukać punktu stałego pewnej funkcji ϕ Układy Kramera AX = B Gdzie A jest nieosobliwą ( o niezerowym wyznaczniku) macierzą kwadratową. Mają dokładen wektor rozwiązania X. Metod dokładne (ni iteracyjne- byłyby naprawdę „dokładne” przy braku błędów obliczeń) Metoda wyznacznikowa- kosztowna numerycznie Metoda Gaussa – sprowadzenie macierzy głównej do postaci trójkątnej i eliminacja zmiennych Metoda LU : zapisanie A=LU, gdzie L- trójkątna dolna, U – trójkatna górna i sprowadzeniu do dwóch układów z macierzą trójkątną: A = (LU )X =B Zamieniamy na układy: LY = B oraz Y=UX. Rozkład Doolitlea lub Crouta, gdy jedna z macierzy trójkątnych ma jedynki na przekłatnej, Rozkład Choleskiego gdy macierz górna pokrywa się z transponowaną dolną. Metody iteracyjne: na podstawie pierszego przybliżenia wektora rozwiązań generuje się kolejne przybliżenia. Np.- metoda Seidla – która sprawdza się dla dużych układów z macierzą przekatniowo dominującą Interpolacja: Mając zadane punkty ( x_i, y_i) przeprowadzamy przez nie pewną funkcję L z zadanej rodziny np. wielomianów, funkcji trygonometrycznych. Tzn L(x_i) = y _i i=0,1,.. Zadana rodzina funkcji stanowi tzw. podprzestrzeń liniową przestrzeni wszystkich funkcji ciągłych tzn. każda funkcja z tej rodziny daje się przedstawić jako kombinacja liniowa pewnych funkcji bazowych. Czyli w postaci c1 ϕ1 (x) + c2 ϕ2 (x) + . . . + cm ϕm (x) Np. bazowe dla wielomianów są jednomiany postaci xn , n=0,1,.. W praktyce szukamy współczynników tej kombinacji. Jeśli punkty y i są wartościami pewnej funkcji f , to mówimy, że L interpoluje f - interpolacja Lagrange’a, Newtona Aproksymacja Dana jest funkcja f Szukamy funkcji L z pewnej podprzestrzeni (np. wielomianu, funkcji trygonometrycznej), która jest w sensie odległości określonej pewną normą jest możliwie najbliżej „blisko” funkcji aproksymowanej. Czyli chcemy aby odległość ||f − L|| była jak najmniejsza. Możemy w różny sposób mierzyć odległość między funkcjami np. jako maksymalną odległość między wszystkimi wartościami (jednostajna), za pomocą pewnego iloczynu skalarnego określonego przez całkę z funkcją wagową itd. (sprawdzić jakie wyrażenie minimalizujemy dla różnych rodzajów aproksymacji aproksymacja jednostajna, średniokwadratowa ciągła, średniokwadratowa dyskretna) Metoda najmniejszych kwadratów – mamy skończoną ilość węzłów i minimalizujemy sumę kwadratów różnic wartości funkcji aproksymowanej i aproksymującej w tych punktach. Uwaga Interpolacja jest szczególnym przypadkiem aproksymacji. Rózniczkowanie numeryczne 1. Wzory oparte na wzorze i szeregu Taylora ( zwykłe, wsteczne, centralne) 2. Ekstrapolacja Richardsona – poprawianie rzędu Całkowanie numeryczne 1. Metoda prostokątów – zastąpienie całki sumą całkową. Dla funkcji nieujemnej – jest to suma pól prostokątów o podstawach będących podprzedziałami przedziału całkowania i wysokościach będących wartościami funkcji w pewnym punkcie (np. w krańcu) podprzedziału 2. Kwadratury Newtona Cotesa. – zamiast funkcji całkujemy wielomian interpolacyjny – stopnia 1- metoda trapezów, stopnia 2 – metoda Simsona stopnia 3 – reguła 3/8 UWAGA – zwiększanie stopnia wielomianu interpolacyjnego nie gwarantuje lepszego przybliżenia. Rozwiązanie - możemy: 1. Kwadratury złożone – dzielimy przedział na podprzedziały i w każdym z nich stosujemy kwadraturę niskiego rzędu 2. Oprzeć się nie na węzłach równoodległych tylko na tzw. węzłach optymalnych Kwadratury Gaussa: węzły optymalne – to miejsca zerowe tzw ciągu wielomianów ortogonalnych – są one stablicowane ze współczynnikami na pewnym przedziale – za pomocą podstawienia sprowadzamy całkę do tego przedziału Całki z funkcją wagową: b ∫ w (x) f (x) dx a W jest tzw. funkcją wagową. Dla różnych funkcji wagowych używamy różnych węzłów optymalnych (zer różnych ciagów wielomianów ortogonalnych) Optymalizacja. Szukanie minimum lokalnego. Funkcje jednej zmiennej: Metoda złotego podziału:Metoda iteracyjna: W przedziale [a,b] wyznaczamy punkty α = a + (1 − λ) (b − a) oraz β = a + λ (b − a) Porównujemy wartości w tych punktach kolejnym przedziałem jest [a, β ] gdy w punkcie α Wartość jest mniejsza oraz [α, b] gdy w punkcie β watość jest mniejsza. ′ Metoda Newtona, stycznych: zamiast szukać minimum f szukamy miejsca zerowego f Za pomocą metody siecznych lub stycznych określonych dla problemu miejsc zerowych Funkcje wielu zmiennych: Metoda iteracyjna : W kolejnym kroku szukamy minimum wzdłuż kolejnego kierunku minimalizując w tym kierunku funkcje jednej zmiennej Metoda największego spadku – minimalizujemy każdorazowo w kierunku antygradientu Metoda Gaussa Seidla- minimalizujemy w kierunku kolejnych wektorów bazowych (np. pionowo, poziomo, pionowo, poziomo itd. )