Significant figures are used to establish the number which is presented in the form of digits. These
digits carry a meaningful representation of numbers. The term significant digits are also used often
instead of figures. We can identify the number of significant digits by counting all the values starting
from the 1st non-zero digit located on the left. For example, 12.45 has four significant digits.
Definition
The significant figures of a given number are those significant or important digits, which convey the
meaning according to its accuracy. For example, 6.658 has four significant digits. These substantial
figures provide precision to the numbers. They are also termed as significant digits.
Rules for Significant Figures
All non-zero digits are significant. 198745 contains six significant digits.
All zeros that occur between any two non zero digits are significant. For example, 108.0097
contains seven significant digits.
All zeros that are on the right of a decimal point and also to the left of a non-zero digit is
never significant. For example, 0.00798 contained three significant digits.
All zeros that are on the right of a decimal point are significant, only if, a non-zero digit does
not follow them. For example, 20.00 contains four significant digits.
All the zeros that are on the right of the last non-zero digit, after the decimal point, are
significant. For example, 0.0079800 contains five significant digits.
All the zeros that are on the right of the last non-zero digit are significant if they come from a
measurement. For example, 1090 m contains four significant digits.
Rounding Significant Figures
A number is rounded off to the required number of significant digits by leaving one or more digits
from the right. When the first digit in left is less than 5, the last digit held should remain constant.
When the first digit is greater than 5, the last digit is rounded up. When the digit left is exactly 5, the
number held is rounded up or down to receive an even number. When more than one digit is left,
rounding off should be done as a whole instead of one digit at a time.
There are two rules to round off the significant numbers:
1. First, we have to check, up to which digit the rounding off should be performed. If the number
after the rounding off digit is less than 5, then we have to exclude all the numbers present on
the right side.
2. But if the digit next to the rounding off digit is greater than 5, then we have to add 1 to the
rounding off digit and exclude the other numbers on the right side.
Significant Figures Examples
Q.1: Identify the number of significant digits/figures in the following given numbers.
45, 0.046, 7.4220, 5002, 3800
Solution:
Number
Number of Significant digits/figures
45
Two
0.046
Two
7.4220
Five
5002
Four
3800
Two
Q.2: Write 12.378162 correct to 4 significant digits.
Solution:
The number 12.378162, rounded to 4 significant digits is 12.38
Hence, 12.38 is the answer.
Practice Questions
Determine the number of significant digits from the following given numbers.
84, 0.084, 5.8480, 2005, 8400
Solve the following 4.76 + 5.62 + 33.21 and find the number of significant digits/figures.
Estimate the number of significant digits from the following computations. 5.2 x 103 x 6.732 x
103
Write 45.378212 correct to 3 significant digits/figures.
friction, force that resists the sliding or rolling of one solid object over another.
Frictional forces, such as the traction needed to walk without slipping, may
be beneficial, but they also present a great measure of opposition to motion. About 20
percent of the engine power of automobiles is consumed in overcoming frictional forces
in the moving parts.
The major cause of friction between metals appears to be the forces of attraction, known
as adhesion, between the contact regions of the surfaces, which are always
microscopically irregular. Friction arises from shearing these “welded” junctions and
from the action of the irregularities of the harder surface plowing across the softer
surface.
Two simple experimental facts characterize the friction of sliding solids. First, the
amount of friction is nearly independent of the area of contact. If a brick is pulled along
a table, the frictional force is the same whether the brick is lying flat or standing on end.
Second, friction is proportional to the load or weight that presses the surfaces together.
If a pile of three bricks is pulled along a table, the friction is three times greater than if
one brick is pulled. Thus, the ratio of friction F to load L is constant. This constant ratio
is called the coefficient of friction and is usually symbolized by the Greek letter mu (μ).
Mathematically, μ = F/L. Because both friction and load are measured in units of force
(such as pounds or newtons), the coefficient of friction is dimensionless. The value of
the coefficient of friction for a case of one or more bricks sliding on a clean wooden table
is about 0.5, which implies that a force equal to half the weight of the bricks is required
just to overcome friction in keeping the bricks moving along at a constant speed. The
frictional force itself is directed oppositely to the motion of the object. Because the
friction thus far described arises between surfaces in relative motion, it is called kinetic
friction.
Static friction, in contrast, acts between surfaces at rest with respect to each other. The
value of static friction varies between zero and the smallest force needed to start motion.
This smallest force required to start motion, or to overcome static friction, is always
greater than the force required to continue the motion, or to overcome kinetic friction.
Rolling friction occurs when a wheel, ball, or cylinder rolls freely over a surface, as in
ball and roller bearings. The main source of friction in rolling appears to
be dissipation of energy involved in deformation of the objects. If a hard ball is rolling
on a level surface, the ball is somewhat flattened and the level surface somewhat
indented in the regions in contact. The elastic deformation or compression produced at
the leading section of the area in contact is a hindrance to motion that is not fully
compensated as the substances spring back to normal shape at the trailing section. The
internal losses in the two substances are similar to those that keep a ball from bouncing
back to the level from which it is dropped. Coefficients of sliding friction are generally
100 to 1,000 times greater than coefficients of rolling friction for corresponding
materials. This advantage was realized historically with
the transition from sledge to wheel. (See mechanics.)
Introduction to rotational motion
What is rotational motion
Pure Rotational motion is the motion of a body about a fixed axis. If a rigid body is moved in
such a way such that all the particles constituting it undergoes circular motion about a common
axis then that type of motion is rotational motion.
Rotational motion of a rigid body around a fixed axis is a special case of rotational
motion. During rotational motion there is also a possibility of axis changing its
orientation. We can not explain the concepts of wobbling or precession by using fixed
axis hypothesis for rotational motion.(wikipedia)
Here in this article about rotational motion I am assuming that you are comfortable
in describing motion in physics. In addition to this you are also aware of types of motion
in physics.. After completing this lesson you would be able to explain Rotational motion
and know the difference between rotational motion and circular motion. We will also
look at rotational motion examples from activities around us in our daily life.
Till now in our study of force and laws of motion we have always analyzed motion of an
object by considering it as a particle even when the size of the object is not negligible. In
this process we represent object under consideration as a point mass and shape and
size of the object remains irrelevant while discussing the particular problem under
consideration. Here in the study of rotational mechanics, this point mass or point particle
model is inadequate for problems involving rigid body motion i.e. rigid body undergoing
both translational motion and rotational motion. One more reason for not considering
the body as particle is that all the particles of the body do not undergo same linear
displacement.
As an example consider the motion of a wheel, we cannot consider a wheel as a single
particle because different parts of the wheel in motion has different velocities and
acceleration.
Here in rotational mechanics, we will consider rigid bodies and their motion. Rigid
bodies have definite shape and size and they are capable of having both rotational and
translational motion.
What is a rigid body?
The rigid body is a body with a perfectly defined and unchanging shape that is no matter how the
body moves, the distance between any two particles within the body remains constant.
Although the way we define rigid body gives us the definition of an idealized rigid body and real
materials always deforms on the application of force and this idealized rigid body assumption
can be used freely for the substances where deformation is negligibly small and can be neglected.
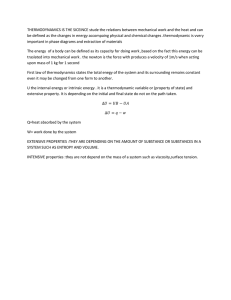
Motion of a rigid body in general can be considered to consist of a translation of center of mass
of the body plus rotation of the body about an axis through the center of mass as shown below in
the figure:
Figure: Motion of a rigid body having transnational motion and rotational motion about center of
mass along path ABAB. You could notice the change in angular position of Point PP in
between two positions of the moving body.
Get rotational motion formulas list by following this link.
Ads by optAd360
Rotational motion Examples
We see rotational motion examples in our daily life. Some of the examples of rotational
motion are
1.
2.
3.
4.
5.
Rotation of earth about its own axis create the cycle of day and night.
Motion of wheel, gears, motors, etc is rotational motion.
Motion of the blades of the helicopter is also rotatory motion.
A door, swiveling on its hinges as you open or close it.
A spinning top, motion of a Ferris Wheal in an amusement park.
Examples Of Rotational Motion
If you want to learn more about rotational dynamics and clear your concepts further then
there is a very good book by MTG Interactive Physics: Rotational Dynamics where you
can clear your concepts further and gain knowledge accordingly.
For those of you who are interested in video tutorials can look at this video course by
udemy
Mastering Rotational Kinematics and Dynamics
In this course, you can learn concepts like Angular variables, Concept of Angular
Velocity and Acceleration, Rolling, Rotation and Torque, Mechanics of a Rolling Mass
on an Inclined Plane, Physics behind a YOYO and other such related concepts. What I
like about this course is how the instructor builds concepts of rotational mechanics as
he takes the course further. There are enough solved examples for students which help
them improve their problem-solving skills.
ROTATIONAL VELOCITY
Angular Velocity and Angular Acceleration
Angular velocity is the rate of velocity at which an object or a particle is
rotating around a center or a specific point in a given time period. It is
also known as rotational velocity. Angular velocity is measured in angle
per unit time or radians per second (rad/s). The rate of change of
angular velocity is angular acceleration. Let us learn in more detail
about the relation between angular velocity and linear velocity, angular
displacement and angular acceleration.
Suggested Videos
Centre of mass and Linear momentum
Cross Product of two vectors in Rectangular Coordinate System
Problem on Moment of Inertia
Centre of mass and Linear momentum
Cross Product of two vectors in Rectangular Coordinate System
Problem on Moment of Inertia
Angular Velocity
Angular velocity plays an eminent role in the rotational motion of an
object. We already know that in an object showing rotational motion all
the particles move in a circle. The linear velocity of every participating
particle is directly related to the angular velocity of the whole object.
These two end up as vector products relative to each other. Basically,
the angular velocity is a vector quantity and is the rotational speed of an
object. The angular displacement of in a given period of time gives the
angular velocity of that object.
Browse more Topics Under System Of Particles And
Rotational Dynamics
Introduction to Rotational Dynamics
Vector Product of Two Vectors
Centre of Mass
Motion of Centre of Mass
Moment of Inertia
Theorems of Parallel and Perpendicular Axis
Rolling Motion
Angular Velocity and Angular Acceleration
Linear Momentum of System of Particles
Torque and Angular Momentum
Equilibrium of a Rigid Body
Angular Momentum in Case of Rotation About a Fixed Axis
Dynamics of Rotational Motion About a Fixed Axis
Kinematics of Rotation Motion about a Fixed Axis
Relation Between Angular Velocity and Linear Velocity
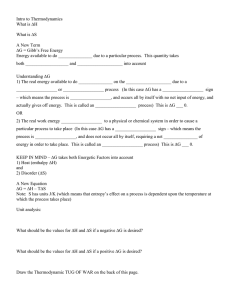
For understanding the relation between the two, we need to consider the
following figure:
The figure above shows a particle with its center of the axis at C
moving at a distance perpendicular to the axis with radius r. v is the
linear velocity of the particle at point P. The point P lies on the tangent
of the circular motion of the particle. Now, after some time(Δt) the
particle from P displaces to point P1. Δθ or ∠PCP1 is the angular
displacement of the particle after the time interval Δt. The average
angular velocity of the particle from point P to P1 = Angular
displacement / Time Interval = Δθ/Δt
At smallest time interval of displacement, for example, when Δt=0 the
rotational velocity can be called an instantaneous angular (ω) velocity,
denoted as dt/dθ for the particle at position P. Hence, we have ω = dt/dθ
Linear velocity (v) here is related to the rotational velocity (ω ) with the
simple relation, v= ωr, r here is the radius of the circle in which the
particle is moving.
Angular Velocity of a Rigid Body
This relation of linear velocity and angular velocity apply on the whole
system of particles in a rigid body. Therefore for any number of
particles; linear velocity vi = ωri
‘i’ applies for any number of particles from 1 to n. For particles away
from the axis linear velocity is ωr while as we analyze the velocity of
particles near the axis, we notice that the value of linear velocity
decreases. At the axis since r=0 linear velocity also becomes a zero.
This shows that the particles at the axis are stationary.
A point worth noting in case of rotational velocity is that the direction
of vector ω does not change with time in case of rotation about a fixed
axis. Its magnitude may increase or decrease. But in case of a general
rotational motion, both the direction and the magnitude of angular
velocity (ω) might change with every passing second.
Browse more Topics under System Of Particles And Rotational
Dynamics
Introduction to Rotational Dynamics
Vector Product of Two Vectors
Centre of Mass
Motion of Centre of Mass
Moment of Inertia
Theorems of Parallel and Perpendicular Axis
Rolling Motion
Angular Velocity and Angular Acceleration
Linear Momentum of System of Particles
Torque and Angular Momentum
Equilibrium of a Rigid Body
Angular Momentum in Case of Rotation About a Fixed Axis
Dynamics of Rotational Motion About a Fixed Axis
Kinematics of Rotation Motion about a Fixed Axis
Rotational Velocity of Revolutions
When a rigid body rotates around an axis, after the lapse of some time it
completes a revolution. The time taken by that rigid body to complete a
revolution is called the frequency of that body. Rotational velocity and
frequency hence have a relation between each other. Here one
revolution is equal to 2π, hence ω= 2π/ T
The time taken to complete one revolution is T and ω= 2π f. ‘f’ is the
frequency of one revolution and is measured in Hertz.
Angular Acceleration
When an object follows a rotational path, it is said to move in
an angular motion or the commonly known rotational motion. In the
course of such motion, the velocity of the object is always changing.
Velocity being a vector involves a movement of an object with speed
that has direction. Now, since in a rotational motion, the particles tend
to follow a circular path their direction at every point changes
constantly. This change results in a change in velocity. This change in
velocity with time gives us the acceleration of that object.
Angular acceleration is a non-constant velocity and is similar to linear
acceleration of translational motion. Understanding linear displacement,
velocity, and acceleration are easy and this is why when we intend to
study rotational motion, we compare its vectors with translational
motion. Like linear acceleration, angular acceleration (α) is the rate of
change of angular velocity with time. Therefore, α = dω/ dt
Now since for rotation about a fixed axis the direction of angular
velocity is fixed therefore the direction of angular momentum α is also
fixed. For such cases, the vector equation transforms into a scalar
equation.
Solved Question For You
1. The angular velocity of a scooter tire of diameter 6 inches rotates 6 times
a second is:
a. 16π
b.2π
c.12π
d.none
Solution: c) 12 π. We have: ω= 2π f. The frequency of the tire is 6
revolution per second;
Therefore we can write, ω = 2π × 6 = 12π
What is torque?
Torque is a measure of the force that can cause an object to rotate about an
axis. Just as force is what causes an object to accelerate in linear kinematics,
torque is what causes an object to acquire angular acceleration.
Torque is a vector quantity. The direction of the torque vector depends on the
direction of the force on the axis.
Anyone who has ever opened a door has an intuitive understanding of torque.
When a person opens a door, they push on the side of the door farthest from
the hinges. Pushing on the side closest to the hinges requires considerably
more force. Although the work done is the same in both cases (the larger
force would be applied over a smaller distance) people generally prefer to
apply less force, hence the usual location of the door handle.
Figure 1: Opening a door with maximum torque.
Torque can be either static or dynamic.
A static torque is one which does not produce an angular acceleration.
Someone pushing on a closed door is applying a static torque to the door
because the door is not rotating about its hinges, despite the force applied.
Someone pedaling a bicycle at constant speed is also applying a static torque
because they are not accelerating.
The drive shaft in a racing car accelerating from the start line is carrying
a dynamic torque because it must be producing an angular acceleration of the
wheels given that the car is accelerating along the track.
The terminology used when describing torque can be confusing. Engineers
sometimes use the term moment, or moment of force interchangeably with
torque. The radius at which the force acts is sometimes called the moment
arm.
How is torque calculated?
The magnitude of the torque vector \tauτtau for a torque produced by a given
force FFF is
\tau = F \cdot r \sin(\theta)τ=F⋅rsin(θ)tau, equals, F, dot, r, sine, left
parenthesis, theta, right parenthesis
where rrr is the length of the moment arm and \thetaθtheta is the angle
between the force vector and the moment arm. In the case of the door shown
in Figure 1, the force is at right angles (90^\circ∘degrees) to the moment arm,
so the sine term becomes 1 and
\tau = F\cdot rτ=F⋅rtau, equals, F, dot, r.
The direction of the torque vector is found by convention using the right hand
grip rule. If a hand is curled around the axis of rotation with the fingers
pointing in the direction of the force, then the torque vector points in the
direction of the thumb as shown in Figure 2.
[Explain: Isn't this somewhat arbitrary?]
Figure 2: Direction of the torque vector found with the right-hand rule.
How is torque measured?
The SI unit for torque is the Newton-meter.
In imperial units, the Foot-pound is often used. This is confusing because
colloquially the pound is sometimes used as a unit of mass and sometimes
force. What is meant here is pound-force, the force due to earth gravity on a
one-pound object. The magnitude of these units is often similar
as 1~\mathrm{Nm} \simeq 1.74~
\mathrm{ft}\cdot\mathrm{lbs}1 Nm≃1.74 ft⋅lbs1, space, N, m, \simeq, 1,
point, 74, space, f, t, dot, l, b, s.
Measuring a static torque in a non-rotating system is usually quite easy, and
done by measuring a force. Given the length of the moment arm, the torque
can be found directly. Measuring torque in a rotating system is considerably
more difficult. One method works by measuring strain within the metal of a
drive shaft which is transmitting torque and sending this information
wirelessly.
What role does torque play in rotational
kinematics?
In rotational kinematics, torque takes the place of force in linear kinematics.
There is a direct equivalent to Newton’s 2ⁿᵈ law of motion (F=maF=maF,
equals, m, a),
\tau = I \alphaτ=Iαtau, equals, I, alpha.
Here, \alphaαalpha is the angular acceleration. III is the rotational inertia, a
property of a rotating system which depends on the mass distribution of the
system. The larger III, the harder it is for an object to acquire angular
acceleration. We derive this expression in our article on rotational inertia.
What is rotational equilibrium?
The concept of rotational equilibrium is an equivalent to Newton’s 1ˢᵗ law for
a rotational system. An object which is not rotating remains not rotating
unless acted on by an external torque. Similarly, an object rotating at constant
angular velocity remains rotating unless acted on by an external torque.
The concept of rotational equilibrium is particularly useful in problems
involving multiple torques acting on a rotatable object. In this case it is
the net torque which is important. If the net torque on a rotatable object is
zero then it will be in rotational equilibrium and not able to acquire angular
acceleration.
Exercise 1:
Consider the wheel shown in Figure 3, acted on by two forces. What
magnitude of the force F_2F2F, start subscript, 2, end subscript will be
required for the wheel to be in rotational equilibrium?
Figure 3: A wheel acted on by two torques.
[Solution]
How does torque relate to power and energy?
There is considerable confusion between torque, power and energy. For
example, the torque of an engine is sometimes incorrectly described as its
'turning power'.
Torque and energy have the same dimensions (i.e. they can be written in the
same fundamental units), but they are not a measure of the same thing. They
differ in that torque is a vector quantity defined only for a rotatable system.
Power however, can be calculated from torque if the rotational speed is
known. In fact, the horsepower of an engine is not typically measured
directly, but calculated from measured torque and rotational speed. The
relationship is:
\begin{aligned} P &= \frac{\mathrm{Force} \cdot
\mathrm{Distance}}{\mathrm{Time}} \\ & = \frac{\mathrm{F}
\cdot 2\pi r}{t} \\ &= 2\pi \tau \omega \qquad
\mathrm{(\omega~in~ revolutions/sec)} \\ &= \tau \omega
\qquad \mathrm{(\omega~in~radian/sec)}\end{aligned}P
=TimeForce⋅Distance=tF⋅2πr
=2πτω(ω in revolutions/sec)=τω(ω in radian/sec)
Along with horsepower, the peak torque produced by a vehicle engine is an
important and commonly quoted specification. Practically speaking, peak
torque is relevant for generally describing how quickly a vehicle will
accelerate and its ability to pull a load. Horsepower (relative to weight) on
the other hand is more relevant to the maximum speed of a vehicle.
[Explain]
It is important to recognize that while maximum torque and horsepower are
useful general specifications, they are of limited use when making
calculations involving the overall motion of a vehicle. This is because in
practice both vary as a function of rotational speed. The general relationship
can be non-linear and differs for different types of motor as shown in Figure
4.
[Explain]
Figure 4: Relationship of available torque to rotational speed for different sources.
How can we increase or decrease torque?
It is often necessary to increase or decrease the torque produced by a motor to
suit different applications. Recall that the length of a lever can increase or
decrease the force on an object at the expense of the distance through which
the lever must be pushed. Similarly, the torque produced by a motor can be
increased or decreased through the use of gearing. An increase in torque
comes with a proportional decrease in rotational speed. The meshing of two
gear teeth can be viewed as equivalent to the interaction of a pair of levers as
shown in Figure 5.
Figure 5: The meshing of two gears viewed as the interaction of two levers.
The use of adjustable gearing is necessary to obtain good performance in
vehicles powered by combustion engines. These engines produce maximum
torque only for a narrow range of high rotational speeds. Adjustable gearing
allows sufficient torque to be delivered to the wheels at any given rotational
speed of the engine.
Bicycles require gearing because of the inability of humans to pedal with a
cadence sufficient to achieve a useful speed when driving a wheel directly
(unless one is cycling a penny-farthing).
[Explain]
Adjustable gearing is not typically required in vehicles powered by steam
engines or electric motors. In both cases, high torque is available at low
speeds and is relatively constant over a wide range of speeds.
Exercise 2a:
A gasoline engine producing 150~\mathrm{Nm}150 Nm150, space, N, m of
torque at a rotational speed of 300~\mathrm{rad/s}300 rad/s300, space, r, a,
d, slash, s is used to drive a winch and lift a weight as shown in figure 6. The
winch drum has a radius of 0.25 m and is driven from the engine via a 1:50
speed reduction gear. What mass could be raised with this setup? (Assume
the winch is in rotational equilibrium, i.e. the mass is traveling up at constant
velocity).
Figure 6: Engine-driven winch used to lift a mass (exercise 2).
[Solution]
Exercise 2b:
At what speed would the weight be traveling upward?
angular momentum
physics
Print
Cite Share More
Alternate titles: moment of momentum
By The Editors of Encyclopaedia Britannica • Edit History
Related Topics:
spin conservation of angular momentum orbital angular momentum total spin angular
momentum Dirac h
See all related content →
Understand the concept of angular momentum through various examples
Learn about angular momentum.
© MinutePhysics (A Britannica Publishing Partner)See all videos for this article
angular momentum, property characterizing the rotary inertia of an object or system
of objects in motion about an axis that may or may not pass through the object or
system. The Earth has orbital angular momentum by reason of its annual revolution
about the Sun and spin angular momentum because of its daily rotation about its axis.
Angular momentum is a vector quantity, requiring the specification of both a magnitude
and a direction for its complete description. The magnitude of the angular momentum
of an orbiting object is equal to its linear momentum (product of its mass m and linear
velocity v) times the perpendicular distance r from the centre of rotation to a line drawn
in the direction of its instantaneous motion and passing through the object’s centre of
gravity, or simply mvr. For a spinning object, on the other hand, the angular
momentum must be considered as the summation of the quantity mvr for all the
particles composing the object. Angular momentum may be formulated equivalently as
the product of I, the moment of inertia, and ω, the angular velocity, of a rotating body or
system, or simply Iω. When the rotation is aligned with one of a body’s principal axes,
the direction of the angular-momentum vector is that of the axis of rotation of the given
object and is designated as positive in the direction that a right-hand screw would
advance if turned similarly. Appropriate MKS or SI units for angular momentum
are kilogram metres squared per second (kg-m2/sec).
For a given object or system isolated from external forces, the total angular momentum
is a constant, a fact that is known as the law of conservation of angular momentum. A
rigid spinning object, for example, continues to spin at a constant rate and with a fixed
orientation unless influenced by the application of an external torque. (The rate of
change of the angular momentum is, in fact, equal to the applied torque.) A figure skater
spins faster, or has a greater angular velocity ω, when the arms are drawn inward,
because this action reduces the moment of inertia I while the product Iω, the skater’s
angular momentum, remains constant. Because of the conservation of direction as well
as magnitude, a spinning gyrocompass in an airplane remains fixed in its orientation,
independent of the motion of the airplane.
What is Thermodynamics?
Thermodynamics in physics is a branch that deals with heat, work and
temperature, and their relation to energy, radiation and physical properties of
matter.
To be specific, it explains how thermal energy is converted to or from other forms of energy and how
matter is affected by this process. Thermal energy is the energy that comes from heat. This heat is
generated by the movement of tiny particles within an object, and the faster these particles move,
the more heat is generated.
Thermodynamics is not concerned about how and at what rate these energy transformations are
carried out. It is based on the initial and final states undergoing the change. It should also be noted
that Thermodynamics is a macroscopic science. This means that it deals with the bulk system
and does not deal with the molecular constitution of matter.
Distinction Between Mechanics and Thermodynamics
The distinction between mechanics and thermodynamics is worth noting. In mechanics, we solely
concentrate on the motion of particles or bodies under the action of forces and torques. On the other
hand, thermodynamics is not concerned with the motion of the system as a whole. It is only
concerned with the internal macroscopic state of the body.
Thermodynamics Timeline
Different Branches of Thermodynamics
Thermodynamics is classified into the following four branches:
Classical Thermodynamics
Statistical Thermodynamics
Chemical Thermodynamics
Equilibrium Thermodynamics
Classical Thermodynamics
In classical thermodynamics, the behaviour of matter is analyzed with a macroscopic approach.
Units such as temperature and pressure are taken into consideration, which helps the individuals
calculate other properties and predict the characteristics of the matter undergoing the process.
Statistical Thermodynamics
In statistical thermodynamics, every molecule is under the spotlight, i.e. the properties of every
molecule and how they interact are taken into consideration to characterize the behaviour of a group
of molecules.
Chemical Thermodynamics
Chemical thermodynamics is the study of how work and heat relate to each other in chemical
reactions and changes of states.
Equilibrium Thermodynamics
Equilibrium thermodynamics is the study of transformations of energy and matter as they approach
the state of equilibrium.
Basic Concepts of Thermodynamics – Thermodynamic Terms
Thermodynamics has its own unique vocabulary associated with it. Good understanding of the basic
concepts forms a sound understanding of various topics discussed in thermodynamics preventing
possible misunderstandings.
Thermodynamic Systems
System
A thermodynamic system is a specific portion of matter with a definite boundary on which our
attention is focused. The system boundary may be real or imaginary, fixed or deformable.
There are three types of systems:
Isolated System – An isolated system cannot exchange both energy and mass with its
surroundings. The universe is considered an isolated system.
Closed System – Across the boundary of the closed system, the transfer of energy takes
place but the transfer of mass doesn’t take place. Refrigerator, compression of gas in the
piston-cylinder assembly are examples of closed systems.
Open System – In an open system, the mass and energy both may be transferred between
the system and surroundings. A steam turbine is an example of an open system.
Interactions of thermodynamic systems
Type of system
Mass flow
Work
Heat
Isolated System
☓
☓
☓
Open System
✓
✓
✓
Closed System
☓
✓
✓
Surrounding
Everything outside the system that has a direct influence on the behaviour of the system is known as
a surrounding.
Thermodynamic Process
A system undergoes a thermodynamic process when there is some energetic change within the
system that is associated with changes in pressure, volume and internal energy.
There are four types of thermodynamic process that have their unique properties, and they are:
Adiabatic Process – A process where no heat transfer into or out of the system occurs.
Isochoric Process – A process where no change in volume occurs and the system does no
work.
Isobaric Process – A process in which no change in pressure occurs.
Isothermal Process – A process in which no change in temperature occurs.
Read More: Thermodynamic Process
A thermodynamic cycle is a process, or a combination of processes conducted such that the initial
and final states of the system are the same. A thermodynamic cycle is also known as cyclic
operation or cyclic processes.
Thermodynamic Equilibrium
At a given state, all properties of a system have fixed values. Thus, if the value of even one property
changes, the system’s state changes to a different one. In a system that is in equilibrium, no
changes in the value of properties occur when it is isolated from its surroundings.
When the temperature is the same throughout the entire system, we consider the system to
be in thermal equilibrium.
When there is no change in pressure at any point of the system, we consider the system to
be in mechanical equilibrium.
When the chemical composition of a system does not vary with time, we consider the system
to be in chemical equilibrium.
Phase equilibrium in a two-phase system is when the mass of each phase reaches an
equilibrium level.
A thermodynamic system is said to be in thermodynamic equilibrium if it is in chemical equilibrium,
mechanical equilibrium and thermal equilibrium and the relevant parameters cease to vary with time.
You may also want to check out these topics given below!
Kelvin Planck Statement
Darcy Weisbach Equation Derivation
Kinetic Theory Of Gases Derivation
Relation Between Kp And Kc
Thermodynamic Properties
Thermodynamic properties are defined as characteristic features of a system, capable of specifying
the system’s state. Thermodynamic properties may be extensive or intensive.
Intensive properties are properties that do not depend on the quantity of matter. Pressure
and temperature are intensive properties.
In the case of extensive properties, their value depends on the mass of the system. Volume,
energy, and enthalpy are extensive properties.
What is Enthalpy?
Enthalpy is the measurement of energy in a thermodynamic system. The quantity of enthalpy equals
the total heat content of a system, equivalent to the system’s internal energy plus the product of
volume and pressure.
Mathematically, the enthalpy, H, equals the sum of the internal energy, E, and the product of
the pressure, P, and volume, V, of the system.
H = E + PV
What is Entropy?
The entropy is a thermodynamic quantity whose value depends on the physical state or condition of
a system. In other words, it is a thermodynamic function used to measure the randomness or
disorder.
For example, the entropy of a solid, where the particles are not free to move, is less than the entropy
of a gas, where the particles will fill the container.
Thermodynamic Potentials
Thermodynamic potentials are quantitative measures of the stored energy in a system. Potentials
measure the energy changes in a system as they evolve from the initial state to the final state.
Based on the system constraints, such as temperature and pressure, different potentials are used.
Different forms of thermodynamic potentials along with their formula are tabulated below:
Internal Energy
Helmholtz free energy
F = U – TS
Enthalpy
H = U + PV
Gibbs Free Energy
G = U + PV – TS
Thermodynamics Solved Problems
Watch the video to know the top seven JEE Thermodynamics questions.
3,770
3,174
Laws of Thermodynamics
Thermodynamics laws define the fundamental physical quantities like energy, temperature and
entropy that characterize thermodynamic systems at thermal equilibrium. These thermodynamics
laws represent how these quantities behave under various circumstances.
How many laws of thermodynamics are there?
There are four laws of thermodynamics and are given below:
Zeroth law of thermodynamics
First law of thermodynamics
Second law of thermodynamics
Third law of thermodynamics
In the next few sections, we will discuss each of the laws of thermodynamics in detail.
Zeroth Law of Thermodynamics
The Zeroth law of thermodynamics states that if two bodies are individually in
equilibrium with a separate third body, then the first two bodies are also in
thermal equilibrium with each other.
This means that if system A is in thermal equilibrium with system C and system B is also in
equilibrium with system C, then system A and B are also in thermal equilibrium.
An example demonstrating the Zeroth Law
Consider two cups A and B with boiling water. When a thermometer is placed in cup A, it gets
warmed up by the water until it reads 100 °C. When it read 100 °C, we say that the thermometer is in
equilibrium with cup A. When we move the thermometer to cup B to read the temperature, it
continues to read 100 °C. The thermometer is also in equilibrium with cup B. By keeping in mind the
zeroth law of thermodynamics; we can conclude that cup A and cup B are in equilibrium with each
other.
The zeroth law of thermodynamics enables us to use thermometers to compare the temperature of
any two objects that we like.
First Law of Thermodynamics
First law of thermodynamics, also known as the law of conservation of energy,
states that energy can neither be created nor destroyed, but it can be changed
from one form to another.
The first law of thermodynamics may seem abstract, but we will get a clearer idea if we look at a few
examples of the first law of thermodynamics.
First Law Of Thermodynamics Examples:
Plants convert the radiant energy of sunlight to chemical energy through photosynthesis. We
eat plants and convert the chemical energy into kinetic energy while we swim, walk, breathe,
and scroll through this page.
Switching on light may seem to produce energy, but it is electrical energy that is converted.
Read More: First Law of Thermodynamics
Second Law of Thermodynamics
Second law of thermodynamics states that the entropy in an isolated system
always increases. Any isolated system spontaneously evolves towards thermal
equilibrium—the state of maximum entropy of the system.
The entropy of the universe only increases and never decreases. Many individuals take this
statement lightly and for granted, but it has an extensive impact and consequence.
Visualizing the second law of thermodynamics
If a room is not tidied or cleaned, it invariably becomes more messy and disorderly with time. When
the room is cleaned, its entropy decreases, but the effort to clean it has resulted in increased entropy
outside the room exceeding the entropy lost.
Read More: Second Law of Thermodynamics
The video below dives deep into the second law of thermodynamics and will help one take a
closer look at how entropy explains disorderliness.
1,28,260
Third Law of Thermodynamics
Third law of thermodynamics states that the entropy of a system approaches a
constant value as the temperature approaches absolute zero.
The entropy of a pure crystalline substance (perfect order) at absolute zero temperature is zero. This
statement holds true if the perfect crystal has only one state with minimum energy.
Third Law Of Thermodynamics Examples:
Let us consider steam as an example to understand the third law of thermodynamics step by
step:
1. The molecules within it move freely and have high entropy.
2. If one decreases the temperature below 100 °C, the steam gets converted to water, where
the movement of molecules is restricted, decreasing the entropy of water.
3. When water is further cooled below 0 °C, it gets converted to solid ice. In this state, the
movement of molecules is further restricted and the entropy of the system reduces more.
4. As the temperature of the ice further reduces, the movement of the molecules in them are
restricted further and the entropy of the substance goes on decreasing.
5. WWhen the ice is cooled to absolute zero, ideally, the entropy should be zero. But in reality,
it is impossible to cool any substance to zero.
Read More:Third Law of Thermodynamics
Thermodynamics Examples in Daily Life
Whether we are sitting in an air-conditioned room or travelling in any vehicle, the application of
thermodynamics is everywhere. We have listed a few of these applications below:
Different types of vehicles such as planes, trucks and ships work on the basis of the 2nd law
of thermodynamics.
The three modes of heat transfer work on the basis of thermodynamics. The heat transfer
concepts are widely used in radiators, heaters and coolers.
Thermodynamics is involved in the study of different types of power plants such as nuclear
power plants, thermal power plants.
Thermodynamics – Summary and Overview
→ In simple terms, thermodynamics deals with the transfer of energy from one form to another.
→ The laws of thermodynamics are:
First law of thermodynamics: Energy can neither be created nor be destroyed, it can only
be transferred from one form to another.
Second law of thermodynamics: The entropy of any isolated system always increases.
Third law of thermodynamics: The entropy of a system approaches a constant value as
the temperature approaches absolute zero.
Zeroth law of thermodynamics: If two thermodynamic systems are in thermal equilibrium
with a third system separately are in thermal equilibrium with each other.
→ Entropy is the measure of the number of possible arrangements the atoms in a system can have.
→ Enthalpy is the measurement of energy in a thermodynamic system.
Frequently Asked Questions – FAQs
What is the importance of the laws of thermodynamics?
The laws of thermodynamics define physical quantities i.e. temperature, energy & entropy that
characterize thermodynamic systems at thermal equilibrium.
What is an example of negative work?
When you’re pushing an object along the floor, the work done by Kinetic Friction is negative.
Can energy be destroyed or lost?
Energy can neither be created nor be destroyed, it can only be transferred from one form to another.
Fans convert electrical energy into mechanical energy – this is explained by
which law?
This is explained by the First law of thermodynamics.
Does the human body obey the laws of thermodynamics?
Yes, the human body obeys the law of thermodynamics. When you are in a crowded room with other
people, you start to feel warm, and you start to sweat. This is the body’s way to cool itself. The heat
from the body is transferred to the sweat. As the sweat absorbs more heat, it evaporates from your
body, becoming more disordered and transferring heat to the air, which heats the room’s air
temperature. Many sweating people in a crowded room, “closed system,” will quickly heat the place.
This is both the first and second laws of thermodynamics in action: No heat is lost; it is merely
transferred and approaches equilibrium with maximum entropy.
Stay tuned to BYJU’S and Fall in Love with Lear