PHYS 1111 Summary for Ch 5 through 8
advertisement

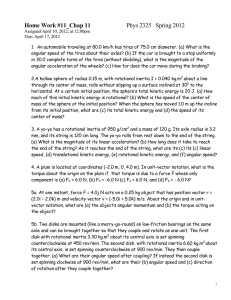
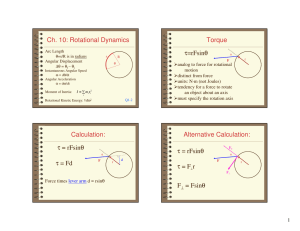
PHYS 1111Fall 09 Summaries for Chapter 9 thru 11 Rotational Motion Angle in Radians s (therefore the angular velocity and angular acceleration) r Kinematical Equations 0 t 0 0t Angular and Tangential s r v r 1 2 2 t 0 2 2 ( 0 ) 2 a r Centripetal Acceleration ac 1 2 ( 0 )t v2 r 2 r Dynamics of Rotational Motion Definition of Torque: = Fl or = Flsinwhere l is the perpendicular distance to from the acting point of the force to the pivot point and is the angle between arm and force. Equilibrium condition for rigid bodies: Fi 0 and i 0 Moment of inertia: I mr 2 Newton’s second law for rotational motion: i I 1 Rotational work (done by a torque): WR = Rotational KE = I 2 2 Total mechanical energy E i 1 1 mCM v 2 I 2 mgh 2 2 Angular momentum L = I (conservation if torque = 0) Elastic and Periodic Motion Elasticity, Stress/Strain = constant = Young’s module. Tensile stress = F/A; Tensile strain = (l-l0)/l0 Hook’s Law F = -kx; the minus sign indicates that the restoring force is against the displacement of the spring. Period, frequency and angular frequency T = 1/f = 2/and k m Simple harmonic motion: x = Asin(t+); A=Amplitude and the initial phase. 1 1 1 v A2 x 2 then vmax = A; amax = 2A; Total mechanical energy E mCM v 2 I 2 mgh kx 2 2 2 2 g mgl Physical Pendulum special case: simple pendulum I = ml2, l I Damped harmonic motion, forced harmonic motion and resonance.