ReactiveityEstimation
advertisement

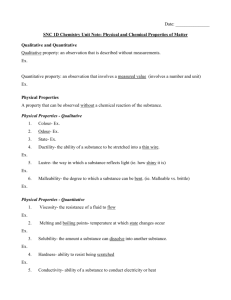
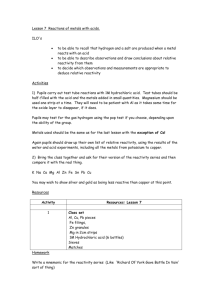
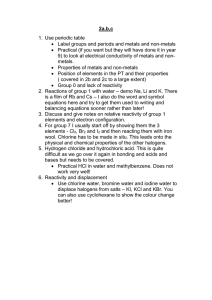
IEEE TRANSACTIONS ON NUCLEAR SCIENCE, VOL. 63, NO. 5, OCTOBER 2016 2691 Reactivity Estimation Based on an Extended State Observer of Neutron Kinetics Zhe Dong, Xiaojin Huang, Duo Li, and Zuoyi Zhang Abstract— Reactivity is a key physical parameter that directly reflects the balance between neutron generation and consumption in every nuclear fission reactor. In this paper, by regarding the reactivity as an extended state-variable of point kinetics, a novel extended state-observer (ESO) is proposed. Theoretic analysis shows that this newly-built ESO provides globally asymptotically bounded estimation for the reactor neutron flux, concentrations of delayed neutron precursors and reactivity. Numerical simulation results illustrate the influence of the observer parameter to its performance, and show that this ESO can provide better reactivity estimation than the classical inverse point kinetics (IPK) method. The ESO has a simple form, and has only one parameter to be tuned online, which can induce an easy engineering implementation. Index Terms— Extended state-observer, reactivity estimation. I. I NTRODUCTION R EACTIVITY is a key physical parameter of every nuclear fission reactor which directly reflects the balance between neutron generation and consumption. Reactivity estimation is crucial for the reactor monitoring and measurement of control rod worth. There are mainly three methods for reactivity estimation, i.e. the period, kinetics and observer based methods. For the period method, the reactivity is calculated from the in-hour equation by the use of the measurement of stable or asymptotic reactor period, which only works for positive periods [1]. For the kinetics method, reactivity estimation can be made continuously by solving the inverse point kinetics (IPK) equation, i.e. a differential-integral equation containing both differentiation of the neutron flux and integration of the concentrations of the delayed neutron precursors. Some analog [2] and digital [3]–[7] reactivity meters based upon the IPK method were developed and implemented practically. In order to improve the precision of numerical differentiation and integration in solving the IPK equation, the Euler-Maclaurin formula [8] and Lagrange method [9] are introduced for higher performance of numerical differentiation and integration respectively. Actually, the discretization of the IPK equation can be realized in not only the time domain Manuscript received June 28, 2016; revised August 4, 2016; accepted August 8, 2016. Date of publication August 16, 2016; date of current version October 11, 2016. This work was supported in part by the National S&T Major Project, and Natural Science Foundation of China (NSFC) under Grant 61374045. The authors are with the Institute of Nuclear and New Energy Technology, Collaborative Innovation Centre of Advanced Nuclear Energy Technology, Key Laboratory of Advanced Reactor Engineering and Safety of Ministry of Education, Tsinghua University, Beijing 100084, China (e-mail: dongzhe@mail.tsinghua.edu.cn). Color versions of one or more of the figures in this paper are available online at http://ieeexplore.ieee.org. Digital Object Identifier 10.1109/TNS.2016.2600648 but also the frequency domain. Based on the relationship between Laplace transform and Z -transform, a finite impulse response (FIR) filter was proposed for solving IPK equation [10], and the parameters of this FIR filter can be optimized by the least square (LS) method for the reduction of nuclear power fluctuation [11]. Because differentiation may enlarge the negative influence of measurement noise, Shimazu gave a simple reactivity estimation approach through omitting the differentiation part of IPK equation, which induces a good noise filtering feature [12]. Some nonlinear techniques such as the sliding mode differentiator [13] were applied to improve the differentiation estimation in the IPK equation [14]. Observerbased method is also an important reactivity estimation method developed since 1990s. Through regarding the reactivity as a constant parameter, Raćz transferred the reactivity measurement problem into a typical parameter estimation problem, and then realized the estimation based upon Kalman filter [15]. By considering the nonlinearity in the point kinetics (PK) equation, the extended Kalman filter (EKF) is then applied for reactivity estimation [16], [17]. The qualitative performance comparison between the EKF and IPK methods [18] shows that the former approach is better than the latter one. Some other observation techniques were also given for reactivity estimation, e.g. Wang, Aldemir and Utkin gave a sliding mode observer based method [19]. The extended state-observer (ESO) proposed by Han [20] is a crucial technique for estimating system uncertainty and realizing active disturbance rejection control (ADRC), which has been widely utilized in practical engineering [21]. Reactivity is affected by many properties of a reactor core such as the composition, geometry, temperature, pressure and ability of producing fission neutrons, which is too difficult to be modelled and can be seen as an uncertainty. Based on the idea of ESO, it is reasonable to regard the reactivity as an extended state variable, and design a proper ESO to estimate it. However, the classical ESO [20], [21] is only suitable for the dynamic systems in Brunovsky form, and is not applicable for reactivity estimation due to the form of PK equation is not canonical. Motivated by this, a novel extended state-observer is proposed for point neutron kinetics, which is then applied for the reactivity estimation. This ESO guarantees globally asymptotically bounded estimation for the neutron flux, precursor concentrations and reactivity. This ESO also has a simple form which leads to easy practical implementation. Finally, numerical simulation results not only illustrate the relationship between observer parameter and its performance but also show that this newly-built ESO is stronger than classical IPK method in the noisy environment. 0018-9499 © 2016 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information. 2692 IEEE TRANSACTIONS ON NUCLEAR SCIENCE, VOL. 63, NO. 5, OCTOBER 2016 II. E XTENDED S TATE -O BSERVER OF N EUTRON K INETICS In this section, a new extended state-observer of neutron kinetics is proposed for estimating the total reactivity, and theoretical performance analysis is also given. A. Extended State-Space Model of Neutron Kinetics The point reactor kinetics (PRK) model gives a satisfactory description for the time-domain behavior of a nuclear reactor, which can be expressed as [22], [23]: ⎧ 6 ⎪ ⎪ βi ρ−β ⎨ ṅr = nr + Cr,i , (1) i=1 ⎪ ⎪ ⎩Ċ = λ n − C , i = 1, · · · , 6, r,i i r r,i where n r is the relative nuclear power, cr,i , βi and λi are respectively the relative concentration, fraction and decay constant of the i th group delayed neutron precursors, β = β1 + β2 + . . . + β6 is the total fraction of delayed neutron precursors, is the effective prompt neutron lifetime, ρ is the reactivity. Here, the relative values means normalized values. For an instance, n r = n/n 0 , where n is the neutron flux, and n 0 is the neutron flux at full power-level. It is not loss of generality to assume that ρ̇ = G ρ (t) , (2) where ei = x̂ i − x i , i = 1, · · · , 8, positive constants ri (i = 1, 2) are the observer gains, and scalar ε is called the perturbation constant satisfying 0 < ε < 1. It is assume here that x 8 and ei are all bounded. Then, the observation error e =[e1 , . . . , e8 ]T converges globally asymptotically to a bounded set if r 1 > ε + c1 , and r2 > max x = x1 ··· x8 T = nr Cr,1 ··· Cr,6 ρ T where only x 1 can be obtained through measurement directly, i.e. system output y of (5) is given by y = x1 , V (e) = (6) and it is clear that y > 0. B. Extended State Observer Design The following theorem, which is the main result of this paper, gives a globally bounded state-observer for system (5). Theorem. Consider system (5) with its state-observer taking the form as ⎧ 6 ⎪ y x̂ 8 r1 βi ⎪ ⎪ ˙1 = − ⎪ x̂ x̂ 1 − x̂ i+1 + − ye1 , ⎪ ⎨ ε i=1 (7) ⎪ x̂˙i+1 = λi x̂ 1 − x̂ i+1 − 2λi e1 , i = 1, · · · , 6, ⎪ ⎪ ⎪˙ r ⎪ ⎩x̂ 8 = − 2 ye1 , ε (10) 6 r 2 − r 1 βi 2 1 T ē P ē + e , 2 2ε λi i+1 (12) i=1 where T ē = e1 e8 , −1 ε (r2 − r1 ) −1 P= . −1 1 , (4) the corresponding extended state-space model given by (1) and (2) can be rewritten as ⎧ 6 ⎪ βi x1 x8 ⎪ ⎪ ⎪ ẋ , = − (x 1 − x i+1 ) + 1 ⎨ i=1 (5) ⎪ ẋ i+1 = λi (x 1 − x i+1 ) , i = 1, · · · , 6, ⎪ ⎪ ⎪ ⎩ ẋ 8 = G ρ , r1 + 1 , Define function V of observation error e as (3) The meaning of equation (2) is that total reactivity ρ can be viewed as an extended state-variable. Then, by defining c2 ε + r12 r1 − ε (9) where ci (i = 1, 2) are arbitrarily given constants. Proof: From system model (5) and extended stateobserver (7), the dynamics of state-observation error can be written as ⎧ 6 ⎪ r1 βi ye8 ⎪ ⎪ ⎪ ė1 = − − ye1 , (e1 − ei+1 ) + ⎪ ⎨ ε i=1 (11) ⎪ ė1+i = −λi (e1 + ei+1 ) , i = 1, · · · , 6, ⎪ ⎪ ⎪ r ⎪ ⎩ė8 = − 2 ye1 − G ρ . ε where function G 1 is norm-bounded, i.e. Gρ ≤ hρ . (8) (13) (14) From inequality (10) and the property of 0 < ε < 1, matrix P is strict positive definite, which means that function V given by equation (12) is a proper Lyapunov function for observation error dynamics (11). Differentiate function V along the trajectory given by (11), 1 V̇ (e) = ēT AT P + PA ē + ēT Pϕ e, G ρ 2 6 r2 − r1 βi ei+1 (e1 + ei+1 ), − (15) ε i=1 where y −ε−1r1 1 , −ε−1r2 0 T 6 βi ϕ e, G ρ = − . (e1 − ei+1 ) G ρ A= (16) (17) i=1 Based on equations (14) and (16) as well as inequality (10), it can be computed that 2 y (r1 −ε)r2 2 −r1 0 y cε2 0 1 T ε A P + PA = − , <− 2 0 1 0 1 (18) DONG et al.: REACTIVITY ESTIMATION BASED ON AN EXTENDED STATE OBSERVER OF NEUTRON KINETICS Fig. 1. 2693 Simulation results in case A1. TABLE I PARAMETERS OF THE P OINT K INETICS and ēT Pϕ = − + r2 − r1 ε 6 βi e1 (e1 − ei+1 ) i=1 6 e8 βi (e1 −ei+1 ) + G ρ (e1 − e8 ) . (19) i=1 Substitute (18) and (19) to equation (15), 6 y r2 − r1 c2 y + (r2 − r1 ) β 2 2 e1 − e82 − βi ei+1 ε ε i=1 + θ e, G ρ , (20) V̇ (e) < − where 6 e8 βi (e1 − ei+1 ). θ e, G ρ = G ρ (e1 − e8 ) + (21) i=1 From (3), it is reasonable to suppose that there exists a large enough positive constant M satisfying inequality (22) θ e, G ρ ≤ M. Remark 1. It is easy to see from (23) that when the perturbation constant ε becomes smaller, the final observation error is smaller. However, from observer expression (7), a smaller ε induces a higher sensitivity to the noises. On the Then, based upon (20) and (22), observation error e globally other hand, although a larger ε induces higher observation asymptotically converges to the bounded set given by error, it reduces the sensitivity to the noises. Thus, εshould be carefully tuned practically. 6 βi 2 . = e ∈ R8 e ≤ Mε c2 y + 1 e12 + εye82 + Remark 2. From (7), there is no online iterative calculation i+1 i=1 of the estimation error covariance matrices as that done in the (23) EKF method, and there is no need to know the statistical characteristics of the noise. Since observer (7) can be implemented This completes the proof of this theorem. 2694 Fig. 2. IEEE TRANSACTIONS ON NUCLEAR SCIENCE, VOL. 63, NO. 5, OCTOBER 2016 Simulation results in case A2. on the widely used digital platforms conveniently, and since the only one parameter to be tuned online is perturbation constant ε. Thus, the ESO-based reactivity estimation approach is suitable for practical engineering implementations. III. S IMULATION S TUDY W ITH D ISCUSSIONS The ESO-based reactivity estimation approach proposed in section II is verified in this section through numerical simulation. The influence of perturbation constant ε to the estimation performance is first shown, and then the ESO-based method is compared to the classical IPK method in a noisy environment. A. Numerical Simulation Results This numerical simulation is performed in Matlab/Simulink platform. The point kinetics with six groups of delayed neutron precursors is adopted, whose parameters are all given in Table I. These values come from the nuclear heating reactor (NHR) [24], [25]. In this simulation, the influence of perturbation constant ε is studied, and then the performance of the ESO-based method is compared to that of the classical IPK method. In the simulation, observer gains ri (i = 1, 2) are chosen to be r1 = 1.0 and r2 = 5.0 so that (9) and (10) are satisfied. Case A (Reactivity Step without Noise): The case study of reactivity step increase and decrease in 2% full power (FP) without measurement noise are performed. Fig. 3. Measurement noise in case B. A1: The neutron kinetics operates at 2% FP steadily and in-itially, and a reactivity step increase of 0.1 (starts at 1000s. The responses of the estimation errors of the relative nuclear power, concentrations of the second and sixth groups of precursors and the estimation of reactivity variation with different ε are shown in Fig. 1. A2: A Reactivity step decrease of 0.5$ starts at 1000s. The responses corresponding to different εare given in Fig. 2. Case B (Reactivity Step with Noise): DONG et al.: REACTIVITY ESTIMATION BASED ON AN EXTENDED STATE OBSERVER OF NEUTRON KINETICS Fig. 4. 2695 Simulation results in case B1. The simulation study in the case of reactivity step increase and decrease at 2% FP in a noisy environment are performed. The noise added to the simulation is shown in Fig. 3, which is rational to verify the observer performance in a noisy environment and is generated by Simulink block of bandlimited white noise with the sample time of 0.1s and power spectral density (PSD) of 1e-8. Moreover, different values of constant ε are adopted. B1: The neutron kinetics runs at 2% FP steadily and initially, and a reactivity step increase of 0.1$ (starts at 1000s. The responses of estimation errors of relative nuclear power and concentrations of the second and sixth precursors and the estimated reactivity based on the ESO-based and classical IPK methods and simulated reactivity are shown in Fig. 4. B2: A reactivity step decrease of 0.5$ starts at 1000s. The responses of the main state-variables are illustrated in Fig. 5. Case C (Reactivity Ramp with Noise): The neutron kinetics runs at 2% FP steadily and initially, and then a reactivity ramp increase of 0.2$ (with the speed of 0.1$/min starts at 1000s. The responses of the estimation errors of the relative nuclear power and concentrations of the second and sixth precursors as well as the estimated values of reactivity based upon both the ESO-based and classical IPK methods and simulated reactivity are shown in Fig. 6. B. Discussions From Figs. 1 and 2, the transition periods and overshoots of the estimation errors of the relative nuclear power and precursor concentrations as well as the estimated reactivity become smaller as perturbation constant ε is chosen to be smaller. If ε is large enough, then there are steady estimation errors. Actually, from (20) and (23), estimation error vector e converges to a smaller bounded set if ε becomes smaller, which explains the numerical phenomena from the theoretic point of view. From the simulation results in Fig. 4 which corresponds to the performance comparison between the ESO and IPK based methods in the case of reactivity step increase at 2%FP, the ESO-based method can be utilized instead of the IPK method in the power operation range. However, in the case of reactivity step and ramp decrease with the amplitude of 0.5$ at 2%FP, due to the neutron kinetics quickly becomes subcritical, the performance of the IPK method deteriorates quickly, but from Fig. 5, ESO based method can still give a satisfactory estimation of neutron flux, precursor concentrations and reactivity. Actually, from the expression of IPK equation dnr nr dt t 6 βi Cri (0) e−λi t + λi nr (τ ) e−λi (t −τ ) dτ , − nr 0 ρ=β+ i=1 (24) as relative neutron flux n r converges to zero, the reactivity estimation becomes more and more sensitive to the fluctuation 2696 IEEE TRANSACTIONS ON NUCLEAR SCIENCE, VOL. 63, NO. 5, OCTOBER 2016 Fig. 5. Simulation results in case B2. Fig. 6. Simulation results in case C. DONG et al.: REACTIVITY ESTIMATION BASED ON AN EXTENDED STATE OBSERVER OF NEUTRON KINETICS of the subcritical state since n r is in the denominator. Due to the reactivity estimation given by ESO (7) does not contain any division operation of the measured relative neutron flux, the estimation performance of the ESO-based method can be still guaranteed in a very low power-level or even in the subcritical state. From Fig. 5, the estimation is sensitive to the noise if perturbation constant ε is small enough, as we can see that there exists a delayed offset. Actually, from the first and third equations of ESO (7), when ε is smaller, the sensitivity to noises is higher, which induces the offset. Moreover, as we have discussed in the case of no noise, if ε is larger, from (20) and (23), estimation error e converges to a larger bounded set, which induces a steady estimation error. Thus, in the practical engineering, perturbation constant ε should be carefully chosen so that there is a satisfactory tradeoff between the estimation precision and noise sensitivity. From Fig. 6, the observation errors of the state-variables in the case of reactivity ramp are all smaller than those in the case of reactivity step, which is caused by the lack of the prompt reactivity change in the ramp case. Although, there is a steady estimation error for the reactivity, the estimation process is converged, and the steady error is acceptable. In a summary, ESO (7) can be applied for reactivity estimation instead of classical IPK method in the power range, and is much stronger than IPK method in the subcritical state. Due to there is no computation about the estimation covariance matrices, the computing load of applying the ESO-based method is much smaller than that of the EKF-based method. Thus, ESO (7) can give effective reactivity estimation with easy engineering implementation. IV. C ONCLUSIONS Reactivity estimation of a nuclear reactor is very important for monitoring shutdown margins, calibration of control rods, qualification of the worth of fuel elements, and fault detection. Reactivity estimation method is the basis of building reactivity meters for facilitating continuous reactivity surveillance in the cases of shutdown, start up and power-range operations. In this paper, a new simple ESO of the point neutron kinetics is proposed for reactivity estimation, which guarantees globally asymptotically bounded estimation for the neutron flux, precursor concentrations and reactivity. Numerical simulation results show that this ESO can be utilized for reactivity estimation instead of the classical IPK method in the power range and in the subcritical case. Only one parameter of the ESO, i.e. perturbation constant ε needs to be tuned online for a satisfactory tradeoff between the estimation precision and noise sensitivity. One of the future work is implementing the ESO in a digital measurement platform for engineering verification. R EFERENCES [1] E. Profio, Experimental Reactor Physics. New York, NY, USA: Wiley, 1976. [2] R. F. Shea, “A transistorized reactivity computer,” IRE Trans. Nucl. Sci., vol. 9, pp. 29–34, 1962. 2697 [3] V. A. Kachalin and V. N. Pridachin, “Measurements of the reactivity of nuclear reactors,” Soviet Atomic Energy, vol. 54, no. 5, pp. 370–372, May 1983. [4] S. A. Ansari, “Development of on-line reactivity meter for nuclear reactors,” IEEE Trans. Nucl. Sci., vol. 38, no. 4, pp. 946–952, Aug. 1991. [5] J. Vegh, S. Kiss, S. Lipcsei, C. Horvath, I. Pos, and G. Kiss, “Implementation of new reactivity measurement system and new reactor noise analysis equipment in a VVER-440 nuclear power plant,” IEEE Trans. Nucl. Sci., vol. 57, no. 5, pp. 2689–2696, Oct. 2010. [6] H. Khalafi, S. H. Mosavi, and S. M. Mirvakili, “Design & construction of a digital real time reactivity meter for tehran research reactor,” Prog. Nucl. Energy, vol. 53, no. 1, pp. 100–105, Jan. 2011. [7] N. Jahan, M. M. Rashid, F. Ahmed, M. G. S. Islam, M. Aliuzzaman, and S. M. A. Islam, “On line measurement of reactivity worth of TRIGA mark-II research reactor control rods,” J. Mod. Phys., vol. 2, no. 9 pp. 1024–1029, Sep. 2011. [8] D. Suescun, J. A. Rodríguez-Sarasty, and J. H. Figueroa-Jiménez, “Reactivity calculation using the Euler–Maclaurin formula,” Ann. Nucl. Energy, vol. 53, pp. 104–108, Mar. 2013. [9] H. Malmir and N. Vosoughi, “On-line reactivity calculation using lagrange method,” Ann. Nucl. Energy, vol. 62, pp. 463–467, Dec. 2013. [10] D. S. Díaz, A. S. Martinez, and F. C. D. Silva, “Calculation of reactivity using a finite impulse response filter,” Ann. Nucl. Energy, vol. 35, no. 3, pp. 472–477, Mar. 2008. [11] D. S. Díaz and A. S. Martinez, “Reactivity calculation with reduction of the nuclear power fluctuations,” Ann. Nucl. Energy, vol. 36, no. 5, pp. 676–679, May 2009. [12] Y. Shimazu, “A simple procedure to estimate reactivity with good noise filtering characteristics,” Ann. Nucl. Energy, vol. 73, pp. 392–397, Nov. 2014. [13] S. Hussain, A. I. Bhatti, A. Samee, and S. H. Qaiser, “Estimation of reactivity and average fuel temperature of a pressurized water reactor using sliding mode differentiator observer,” IEEE Trans. Nucl. Sci., vol. 60, no. 4, pp. 3025–3032, Aug. 2013. [14] M. Iqbal, A. I. Bhatti, S. I. Ayubi, and Q. Khan, “Robust parameter estimation of nonlinear systems using sliding-mode differentiator observer,” IEEE Trans. Ind. Electron., vol. 58, no. 2, pp. 680–689, Feb. 2011. [15] A. Rácz, “On the estimation of a small reactivity change in critical reactors by Kalman filtering technique,” Ann. Nucl. Energy, vol. 19, no. 9, pp. 527–538, Sep. 1992. [16] T. U. Bhatt et al., “Estimation of sub-criticality using extended Kalman filtering technique,” Ann. Nucl. Energy, vol. 60, pp. 98–105, Oct. 2013. [17] R. B. E. Silva, A. L. F. Marques, J. J. Cruz, K. Shirvan, and M. S. Kazimi, “Reactivity estimation during a reactivity-initiated accident using the extended Kalman filter,” Ann. Nucl. Energy, vol. 85, pp. 753–762, Nov. 2015. [18] Y. Shimazu and W. F. G. V. Rooijen, “Qualitative performance comparison of reactivity estimation between the extended Kalman filter technique and the inverse point kinetic method,” Ann. Nucl. Energy, vol. 66, pp. 161–166, Apr. 2014. [19] P. Wang, T. Aldemir, and V. I. Utkin, “Estimation of xenon concentration and reactivity in nuclear reactors using liding mode observers,” in Proc. IEEE Conf. Decision Control, Orlando, FL, USA, Dec. 2001. pp. 1801–1806. [20] J. Han, “From PID to active disturbance rejection control,” IEEE Trans. Ind. Electron, vol. 56, no. 3, pp. 900–906, Mar. 2009. [21] Y. Huang and W. Xue, “Active disturbance rejection control: Methodology and theoretical analysis,” ISA Trans., vol. 53, no. 4, pp. 963–976, Jul. 2014. [22] M. A. Schultz, Control of Nuclear Reactors and Power Plant, 2nd ed. New York, NY, USA: McGraw-Hill, 1961. [23] A. Ben-Abdennour, R. M. Edwards, and K. Y. Lee, “LQG/LTR robust control of nuclear reactors with improved temperature performance,” IEEE Trans. Nucl. Sci., vol. 39, no. 6, pp. 2286–2294, Dec. 1992. [24] D. Wang, C. Ma, D. Dong, and J. Lin, “Chinese nuclear heating test reactor and demonstration plant,” Nucl. Eng. Design, vol. 136, nos. 1-2, pp. 91–98, Aug. 1992. [25] D. Wang, Z. Gao, and W. Zheng, “Technical design features and safety analysis of the 200 MWt nuclear heating reactor,” Nucl. Eng. Design, vol. 143, no. 1, pp. 1–7, Aug. 1993.