J140 - Acoustics and Dynamics Laboratory

Active control of amplitude or frequency modulated sounds in a duct
Vivake Asnani, a) Rajendra Singh, b) and Stephen Yurkovich c)
(Received 2004 November 11; revised 2005 June 3; accepted 2005 June 8)
Modulated disturbances are often produced by noise sources in rotating machinery such as gears, bearings and fans. Such disturbances carry frequency side-bands, which interact with the main components (such as gear mesh or blade passage frequencies and their harmonics) to influence the perception of sound. Traditional active control schemes tend to attenuate the mean-squared error, while yielding a residual spectrum with more dominant side-band structures that could degrade sound quality. In this paper, we study the side-band phenomenon by applying active control to amplitude or frequency modulated sounds in a duct. An attempt is first made to attenuate these sounds using the conventional FX-LMS algorithm. This algorithm creates a residual noise spectrum where frequency side-bands become more prevalent. Next, the narrowband adaptive noise equalizer (ANE) is employed since it allows independent gain control at each disturbance frequency known a priori, even if they are closely spaced. The ANE algorithm is based on the adaptive notch filter concept, and thus complete cancellation at all disturbance frequencies is also possible. Indeed, superior control of the residual spectral shape is observed. A few areas of research that could make improvements to available algorithms, in the context of modulated noise disturbances, are suggested. © 2005 Institute of Noise Control Engineering .
Primary subject classification: 38; secondary subject classification: 37
1. INTRODUCTION
In most active noise control (ANC) applications, complete cancellation of the disturbance field is not possible and the residual noise spectrum may have an undesirable shape. This is often the case when the total mean-squared error is minimized, such as in the Filtered-X LMS (FX-LMS) algorithm that was originally proposed by Morgan 1 and Widrow et al 2 . It was first used specifically for ANC by Burgess 3 and today the FX-LMS algorithm is widely used in practical ANC applications.
4 The time domain narrowband adaptive noise equalizer (ANE), based on the adaptive notch filter concept 5 , was first introduced by Ji and Kuo 6, 7, 8 as a method to adjust the amplitudes of harmonic components in a periodic disturbance. Diego et al.
9 , suggested a modification to the error feedback structure which enables independent gain control of neighboring frequencies in a disturbance spectrum. This modification makes the ANE more useful for controlling quasi-periodic disturbances. An analytical and experimental comparison between the original and modified ANE are presented in Diego et al 10 . In this article, we investigate the applicability of the FX-LMS and ANE 9 algorithms to active control of modulated sounds where the frequency components are not harmonically related and may be closely spaced.
Modulated noise disturbances are often perceived as coarse and unpleasant due to their time-varying envelope.
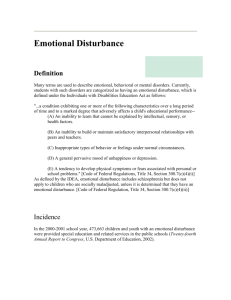
Such disturbances are generated through vibro-acoustic interactions in rotating machinery applications. Figure
1(upper plot) illustrates the envelope variation of an amplitude modulated (AM) signal. Modulation phenomena can also a) The Ohio State University, Graduate Research Associate in Mechanical
Engineering, Columbus, OH 43210, E-mail: asnani.1@osu.edu
b) The Ohio State University, Professor in Mechanical Engineering, Coc) lumbus, OH 43210, E-mail: singh.3@osu.edu
The Ohio State University, Professor in Electrical Engineering, Columbus, OH 43210, E-mail: yurkovich.1@osu.edu
Noise Control Eng. J. 53 (5), 2005 Sept–Oct be recognized by side-bands in the frequency domain, as shown in the lower plot. Such disturbances are of significant concern for manufacturers of consumer products (automobiles, power tools, household appliances, etc.) due to their impact on perceived operation and sound quality.
11 Modulated noise is also associated with the non-ideal functioning of rotating machines; for this reason side-bands are carefully scrutinized in the machinery diagnostics field for health monitoring purposes.
12
Typically the gear mesh, blade passage or the like
(designated as the carrier frequencies in this article) are the primary concern and thus the side-band structures that exist within the vibration or sound spectra are not specifically targeted by active control algorithms. For example, Guan et
2 -
1 -
0 -
-1 -
-2 --
0
1
0.5
5 10 15
Time (s)
20 25
0
0.8 0.9 1
Frequency (Hz)
1.1
Fig. 1 - Example of AM signal in time and frequency domains
1.2
165
-
-
-
30
-
-
Asnani - 1
al.
13 developed a system, based on a variant of the FX-LMS algorithm, to attenuate the vibration response of a gearbox at harmonics of the gear mesh frequency (frequency of gear tooth contact). Significant attenuation was achieved at the targeted mesh frequency harmonics, but the modulation sideband structures around these frequencies were significantly augmented. To the best of our knowledge, only one publication, written by Mucci and Singh 14 , has specifically addressed the modulated ANC problem. They examined the feasibility of canceling amplitude modulated or frequency modulated
(FM) vibration disturbances applied to a structural beam.
The basic premise behind studying these disturbances was that the complex spectra produced by geared systems could be synthesized by an appropriate combination of AM and
FM functions. A single-input, single-output (SISO) control system was implemented to attenuate the mean-squared acceleration using the FX-LMS algorithm. Their results included attenuation at all frequencies in both the AM and
FM spectra. However, the carrier frequencies were attenuated more significantly and the residual error contained frequency side-bands comparable to or greater in magnitude than the carrier components. In this article, we study the side-band phenomenon by applying active control to synthesized AM or
FM sounds in a duct. We implement the FX-LMS algorithm to replicate the phenomenon observed by Mucci and Singh 14 . We then implement the ANE to show its ability to arbitrarily shape the disturbance spectra or achieve complete cancellation.
The trigonometric expansion highlights the presence of three frequency components in the spectrum of the AM disturbance; these are the carrier frequency and two side-bands at plus and minus the modulation frequency. Using the same notation, the
FM function is written as
F
FM
( ) = cos
Ω c t + ϕ m sin ( Ω m t )
= J
0
( ) cos Ω c t +
∞
∑ p = 1
( ) p
J p
( ) cos
( p m
) t + ( ) p cos ( Ω c
+ p Ω m
) t
(2)
The expansion shows that this disturbance has an infinite
.
number of side-bands surrounding the carrier frequency component at integer multiples of the modulation frequency.
The amplitude of the signal components are controlled by
J p
( ϕ m
); this is the Bessel function of the first kind of order p , where the argument is the modulation index, ϕ study, the modulation index is set at unity.
m
. For the present
3. EXPERIMENTAL SYSTEM
A. Duct Geometry and Characteristics
A duct system is used to implement ANC on plane wave noise disturbances facilitating the use of SISO control schemes.
The duct environment with three acoustic cavities is shown in
Figure 2. The center cavity is the duct where the disturbance and control sound fields interact. At the rear and top of the main duct are enclosures to house the disturbance speaker and control speaker, respectively. These enclosures are identical and serve to improve the low frequency response of the speakers. The main duct is closed at both ends to minimize contamination from the surrounding environment. The width and height of the acoustic duct are both 0.140 m and the first transverse natural frequency is 1224 Hz, as measured. The length of the duct was chosen based on spacing of the longitudinal modes in the frequency domain. It is undesirable to have significant
2. PROBLEM FORMULATION
This article compares the steady state results of implementing the FX-LMS and the ANE algorithms for modulated disturbances. Past research 14 has shown the FX-LMS algorithm to converge to a biased frequency spectrum when modulation side-bands are present. The algorithm is widely used in
ANC applications; however in the presence of modulated disturbances it may have undesirable subjective effects. The
ANE 9 allows independent control of closely spaced frequency components, and may be a viable alternative to the FX-LMS algorithm for control of modulated disturbances. To evaluate this hypothesis, both algorithms are implemented using an acoustic duct experiment where control may be applied to either resonant or off-resonant regimes. Specifically our objectives are to:
1. Show the modulation effects, in time and frequency domain, of implementing the FX-LMS algorithm.
2. Examine the applicability of the ANE for canceling and reshaping of modulated sound spectra.
The scope of the study is limited to SISO control for the sake of simplicity. Similar to Mucci and Singh 14 , the disturbances are generated using simple AM and FM functions.
The AM disturbances are of the following form, where F is the vibro-acoustic signal, Ω c
and Ω m
are the carrier and modulation frequencies (rad/s) and t is the time (s).
F
AM
( ) = sin( Ω c t + ( Ω m t ) = sin( Ω c t ) +
1
2
Ω c
± Ω m
) t ±
π
2
,
(1)
Fig. 2 - Acoustic duct
166 Noise Control Eng. J. 53 (5), 2005 Sept–Oct
Asnani - 2
modal overlap since modulated disturbances would excite more than one mode, unnecessarily complicating the sound pressure spectra. Consequently, wide spacing between modes is preferred and accomplished by making the duct relatively short. Unfortunately, a short duct reduces the amount of time available for processing in feed-forward control systems. Also, a short duct forces the microphone to be positioned in the near field of the speakers which cannot be controlled effectively with a SISO system. Considering the tradeoff, the duct length is selected as 0.686 m and the first four measured plane wave natural frequencies are 256, 499, 740.5, and 976 Hz.
B. Instrumentation and Hardware
A schematic of the ANC hardware and instrumentation is shown in Figure 3. The speakers chosen for disturbance and control sources are Dynaudio model MW160. These are 0.17 m
(cone diameter) speakers with virtually flat frequency response and very low harmonic distortion in the range from 55 Hz to
3.5 kHz. The speakers are driven by an Elecro-Voice highfidelity amplifier. A PCB microphone, preamplifier and signal conditioner are used to sense the pressure signal at the end of the duct. The dSPACE DS1104 controller board is utilized to interface with the transducer signals and implement control algorithms in real-time. This controller board connects to a PC via the PCI slot on the motherboard. Algorithms are developed in Simulink and then compiled into assembly language. The assembly code is then sent to flash memory onboard the
DS1104 controller board for implementation. The DS1104 utilizes a 250 MHz CPU to run the program in real-time. The controller board interfaces with the analog transducer signals via 16-bit analog-to-digital converters (ADCs) and digital-toanalog convertors (DACs).
C. Oversampling Scheme
An oversampling scheme is employed as an alternative to analog anti-aliasing and reconstruction filters. The sampling rate, f s
, is 20,000 Hz and the control rate, f c
, is 2500 Hz.
Decimation and interpolation are each implemented in two stages using polyphase structures to minimize filter order and computational burden, respectively.
15 The sampling rate places the first spectral image in the range from 18,775 to 20,000 Hz
(corresponding to the baseband 0 to 1225 Hz). This range is greatly attenuated by the action of the zero-order-hold in the
2 Channel
Amplifier
Disturbance
Speaker
Control
Speaker
DACs
Controller Board
ADC
Computer
Signal Conditioner
Fig. 3 - Experimental system
Noise Control Eng. J. 53 (5), 2005 Sept–Oct
Microphone /
Preamplifier
DAC; thus the first spectral image does not influence the sound field in the duct. Higher order images are also insignificant due to the natural low-pass characteristic of the physical system.
4. APPLICATION OF THE FILTERED-X
LMS ALGORITHM TO MODULATED
DISTURBANCES
The oversampled FX-LMS based control system is illustrated in Figure 4. In the figure, the interpolation and decimation blocks change the sampling rate between f
(associated with the sampling index n) and f s c
(associated with the sampling index m), each introduce 1.65 milliseconds of delay. Here, x[m] is the reference signal, which is generated from either the AM or FM function in equations (1) or (2) by discretizing the time variable, t = m· h interval h c
= 1/ f c
H p c
, with the control time
(s). In the top path of the diagram, x[m] is interpolated, then travels through transfer functions, Z p
( s ) and
( s ) in the Laplace domain ( s ), to produce the disturbance sound field. The Z p
( s ) transfer function represents the primary
DAC, while the first amplifier channel, the disturbance speaker, and the acoustic path from the disturbance speaker to the microphone are represented by H p
( s ). In the middle path of the diagram, x[m] passes through the adaptive filter, W ( z ), to generate the control signal, y[m]. Next, y[m] is interpolated and passes through Z s
( s ) and H s
( s ) to produce the control sound s
( s ) represents the secondary DAC, while H field. Here, Z s
( s ) collectively represents the second amplifier channel, control speaker, and the acoustic path from the control speaker to the microphone. The summing junction for the disturbance and control sound fields represents an acoustic superposition at the microphone location. The residual sound field is sensed by the microphone system, M ( s ), oversampled by the ADC
(where h s
= 1/ f s
(s)), and then decimated to produce the error signal, e[m]. The LMS block utilizes the error signal and a filtered reference signal, x ’ [m], to update the adaptive filter coefficients. The filter,
ˆ
( z ), is used to compensate for the non-unity control path transfer function, C ( z ), between y[m] and e[m].
4
To better clarify the elements of the control path, Figure
5 shows the FX-LMS system rearranged into the standard form 4 . In the figure, P ( z ) is the discrete primary path transfer function. The output of the primary path is the disturbance signal, d[m], which can be measured directly in the absence of a control signal. The control path consists of the interpolation block, the Z s
( s ), H s
( s ), and M ( s ) blocks, the ADC, and finally the decimation block. Off-line system identification is done to construct the control path estimate, ˆ ( z ), which consists of a 49 sample delay together with a 21 st order IIR filter. This model is accurate to within two degrees of the measured control path phase response in the frequency range 40 - 850 Hz. The coefficients of the adaptive filter, W ( z ), are updated by the standard FX-LMS equation, 4 w
[ m 1
] = w
[ ] − µ ⋅ [ ] [ ] (3) such that the mean-squared error is minimized. In (3), w [m] is the adaptive filter coefficient vector with M elements, μ is
167
Asnani - 3
x[m]
Interpolation
W ( z ) x[n] y[m]
Z p
( s )
Interpolation y[n]
H
Z p s
(
( s s
)
) x'[m] e[m] e[n]
ˆ ( z ) LMS Decimation
Fig. 4 - Schematic of the FX-LMS-based control system implemented with the oversampling scheme n h s
Disturbance sound field
H s
( s )
Control sound field
Residual sound field
M ( s ) the step size and x ’ [m] is the filtered reference signal vector constructed from M delayed samples of x ’ [m], x
' x x '
[ ]
=
= ' ' '
'
' x [m], x [m 1]
,
⋅⋅⋅ ⋅⋅⋅
,
'
'
' x [m −
−
Asnani - 4
+
+
+
T
.
T
T
.
.
(4)
In this system the reference and disturbance signals have identical frequency content, since the primary path is linear and time-invariant. In a real application, the reference signal could be measured or internally generated. A measured reference signal, say from an accelerometer measurement of the radiating structure, would permit control to be applied without prior knowledge of the disturbance frequencies. Some noise contamination is inevitable when using a measured reference, which reduces the cancellation performance.
4
However, in rotating machines modulation processes could have predictable frequency components, which should allow a coherent reference signal to be synthesized. For example, in a gearbox application the gear mesh (carrier) frequency and shaft order (modulation) frequencies are all kinematically related.
Therefore the reference signal could be generated ‘on the fly’ using a tachometer measurement of any rotating part in the system.
11,12
The magnitude frequency responses of the primary path and control path transfer functions are shown in Figure 6, where the first four plane wave modes are distinct. Note that Δ f is the frequency resolution (Hz) or spacing between frequency bins in the discrete Fourier transform. Past researchers have observed that on-resonance disturbances are predisposed to cancellation using the FX-LMS algorithm.
14 Accordingly, control results are provided for two disturbance cases. In x[m]
Interpolation Z p
( s )
W ( z ) y[m]
Interpolation
ˆ ( z ) x'[m]
LMS
Fig. 5 - FX-LMS-based control system in standard form
168 Noise Control Eng. J. 53 (5), 2005 Sept–Oct
P ( z )
H p
( s )
Z s
( s )
M ( s )
C ( z ) n h s
H s
( s ) M ( s )
Decimation n h s
Decimation d[m] e[m]
Asnani - 5
Primary Path
0 -
-10 -
-20 -
-30 -
-40 -
-50
256 499 740.5 976 1224
Control Path
0 -
-20 -
-40
-60
-
-
-80 -
-100
256 499 740.5 976 1224
Frequency (∆f = 0.025 Hz)
Fig. 6 - Magnitude of frequency response functions of the primary and control paths
-
-
-
-
Asnani - 6
Case 1, the AM and FM disturbances have carrier frequencies corresponding to the first natural frequency of the duct at 256
Hz. In Case 2, results are presented where the first side-band
(higher in frequency than the carrier) excites the first natural frequency. The modulation frequency is set at 15 Hz for all results, so the disturbances tend to excite only the first mode.
For AM disturbances, an adaptive filter with six taps is used, under the premise that only two filter taps are necessary for each sinusoidal reference frequency. For FM disturbances, a
14 tap filter is employed since the reference signal only has appreciable amplitude at the carrier frequency and first three side-band pairs. Subsequently, a parametric study is done to examine the effect of increased filter size on the residual error.
The step size is selected conservatively, μ = 0.01, compared to the maximum value for stability 4 , since we are not interested in tracking or optimizing the convergence time. Moreover, we aim to minimize the effect of gradient estimation noise 16 to observe the minimum mean-squared error for all cases.
A. Case 1 (AM and FM)
Figure 7 shows the result of using the FX-LMS algorithm to attenuate the AM Case 1 disturbance, for which the carrier frequency corresponds to the first plane wave natural frequency of the duct (256 Hz). In the uncontrolled state, the carrier frequency is approximately 10 dB higher than the two sidebands in the disturbance spectrum. After control is applied, all frequency components are diminished. However the carrier is attenuated more significantly and becomes 30 dB lower than the side-band structures in the residual spectrum. The time-history effects from control can be seen in Figure 8. The
-
-
-
-
-
Noise Control Eng. J. 53 (5), 2005 Sept–Oct
130 -
120 -
110 -
100 -
90 -
80 -
70 -
60 -
50 -
40 -
30 -
20 -
10 -
Control Off
-
-
-
-
-
-
-
-
-
-
-
-
-
Control On
130 -
120 -
110 -
100 -
90 -
80 -
70 -
60 -
50 -
40 -
30 -
20 -
10 -
0
241 256 271
0
241
Frequency (∆f = 0.025 Hz)
256 271
Fig. 7 - Control of the AM Case 1 disturbance using the FX-LMS algorithm- Spectral contents
-
-
-
-
-
-
-
-
-
-
-
-
peak amplitude of the disturbance is lessened; nevertheless, the beating phenomenon of the modulation envelope is now more distinct.
The results from the FM Case 1 disturbance are shown in
Figure 9. There is a countably infinite set of side-bands in the disturbance spectrum at integer multiples of 15 Hz from the carrier frequency. However, the Figure shows only the sidebands with appreciable amplitudes in the range from 211 to
301 Hz. The disturbance is attenuated at all frequencies in this range, but again the control is most effective at the carrier frequency (corresponding the natural frequency of the duct).
Also, it should be noted that the further the side-bands are away from the carrier, the less they are attenuated by the controller.
The time-history plots in Figure 9 show that the modulation envelope becomes more apparent after control is applied.
Control Off
40 -
20 -
0 -
-20 -
-40
0.1 0.2
Control On
0.3 0.4
2 -
1 -
0 -
-1 -
-2
0.1 0.2 0.3
Time (sampling period = 0.0004 s)
0.4
Fig. 8 - Control of the AM Case 1 disturbance using the FX-LMS algorithm- Time history
-
-
-
-
-
-
-
-
169
Asnani - 8
Control Off
-
-
-
Control On
130 -
120 -
110 -
130 -
120 -
110 -
100 -
90 -
80 -
70 -
60 -
50 -
40 -
30 -
20 -
10 -
-
-
-
-
-
-
-
-
-
-
100 -
90 -
40 -
30 -
20 -
10 -
80 -
70 -
60 -
50 -
-
-
-
-
-
-
-
-
-
-
0
211 226 241 256 271 286 301
0
211 226 241 256 271 286 301
Frequency (∆f = 0.025 Hz)
Fig. 9 - Control of the FM Case 1 disturbance using the FX-LMS algorithm- Spectral contents
-
-
-
Control Off
-
-
-
-
-
-
-
-
-
-
-
-
130 -
120 -
110 -
100 -
90 -
80 -
70 -
60 -
50 -
40 -
30 -
20 -
Control On
130 -
120 -
110 -
100 -
90 -
80 -
70 -
60 -
50 -
40 -
30 -
20 -
10 10 -
0
226 241 256
0
226
Frequency (∆f = 0.025 Hz)
241 256
Fig. 11 - Control of the AM Case 2 disturbance using the FX-LMS algorithm- Spectral contents
-
-
-
-
-
-
-
-
-
-
-
-
-
B. Case 2 (AM and FM)
The AM disturbance results for Case 2 are presented in
Figure 11, where the upper side-band frequency equals the first plane wave natural frequency (256 Hz) of the duct. As a result its amplitude is comparable to the carrier frequency in the disturbance spectrum. However, the carrier frequency is attenuated most by the controller, while the side-bands are reduced to equal amplitudes. The upper side-band receives significantly more attenuation than the lower side-band and the overall attenuation is less than the Case 1 disturbance.
The time-history plots in Figure 12 show that the modulation envelope is apparent both before and after control, but its characteristics are different.
The FM results for Case 2 are shown in Figure 13. The first upper side-band corresponds to the duct natural frequency
(256 Hz) and so its amplitude is comparable to the carrier component. Unlike the previous cases, the residual pressure spectrum is highly asymmetric and the first upper sideband receives more attenuation than the carrier frequency (241
Hz). Also, all upper side-bands are attenuated more than the respective lower side-bands, possibly because they are closer to the resonance. Figure 14 shows the time history for this case, where after control the modulation envelope has an irregular pattern of both small and large envelope variations.
C. Parametric Study of Filter Size
In Cases 1 and 2, the FX-LMS algorithm converges to a biased solution where side-bands tend to dominate the residual
20 -
10 -
0 -
-10 -
-20
0.5
-
0 -
0.1
Control Off
0.2
Control On
0.3 0.4
-
-
-
-
-
-
-0.5
0.1 0.2 0.3
Time (sampling period = 0.0004 s)
0.4
Fig. 10 - Control of the FM Case 1 disturbance using the FX-LMS algorithm- Time history
170 Noise Control Eng. J. 53 (5), 2005 Sept–Oct
40 -
20 -
0 -
-20 -
Control Off
-
-
-
-
-40
0.1 0.2
Control On
0.3 0.4
2 -
1 -
-
0 -
-1 -
-
-2 -
0 0.1 0.2 0.3
Time (sampling period = 0.0004 s)
0.4
-
0.5
Fig. 12 - Control of the AM Case 2 disturbance using the FX-LMS algorithm- Time history
Asnani - 10 Asnani - 8
Control Off
-
-
-
-
-
-
-
-
-
-
-
130 -
120 -
110 -
100 -
90 -
80 -
70 -
60 -
50 -
40 -
30 -
Control On
130 -
120 -
110 -
100 -
90 -
80 -
70 -
60 -
50 -
40 -
30 -
20 -
10 -
20 -
10 -
-
-
-
-
-
-
-
-
-
0
196 211 226 241 256 271 286
0
196 211 226 241 256 271 286
Frequency (∆f = 0.025 Hz)
Fig. 13 - Control of the FM Case 2 disturbance using the FX-LMS algorithm- Spectral contents
-
-
-
-
95
90
85
80
-
-
-
-
Lower Sideband
Carrier Frequency
Upper Sideband
Mean-Square
-
-
-
-
-
75 -
70 -
65 -
60 -
8 10 12 14
Number of Filter Taps (M)
16 18
Fig. 15 - Effect of filter size on residual error in the FX-LMS algorithm
-
-
20 -
10 -
0 -
-10 -
-20
0.5
error spectrum. One explanation might be that the filter sizes are two small to accurately model the plant dynamics in the disturbance frequency band. Here we repeat Case 1 for the
AM disturbance and iterate the filter size. Figure 15 shows the residual sound pressure level for the three frequency components and the overall mean-squared error for filter sizes in the range from 6 to 20 taps. As filter order is increased up to 16 taps, the side-bands and the mean-squared error get smaller, while the carrier frequency level increases. However, after 16 taps all frequencies increase in error. At the optimal value of 16 taps, the side-bands are still about 10 dB higher in amplitude than the carrier frequency. Alternatively, this data can be presented from the standpoint of insertion loss (IL) as in Figure 16. The IL is defined as the difference between sound pressure level before and after control. The plot shows that for all filter sizes the IL is greatest at the fundamental frequency. At the optimum value of 16 taps the carrier and side-band insertion losses differ by about 21 dB. Thus even when the filter size is optimized for mean-squared attenuation,
5. APPLICATION OF THE ANE TO
A schematic of the single-frequency adaptive noise equalizer (SFANE), developed by Ji and Kuo in Figure 17. Similar to the FX-LMS experiment,
F x
0
FM
MODULATED DISTURBANCES
6, 7, 8 , is shown
F
AM
( t ) or
( t ) is discretized and sent through the primary path, P ( z ), to generate the disturbance signal, d[m]. However, the reference signal is an internally generated cosine wave denoted as
[m]. In practical applications the reference signal generator
Control Off
0 -
0.1 0.2
Control On
0.3 0.4
-
-
-0.5
0.1 0.2 0.3
Time (sampling period = 0.0004 s)
0.4
Fig. 14 - Control of the FM Case 2 disturbance using the FX-LMS algorithm- Time history
Noise Control Eng. J. 53 (5), 2005 Sept–Oct
-
-
-
65
60
-
-
Lower Sideband
Carrier Frequency
Upper Sideband
Mean-Square
-
-
-
55 -
50 -
45 -
40 -
35 -
30 -
25 -
20 -
15 -
8 10 12 14 16
Number of Filter Taps (M)
18
Fig. 16 - Effect of filter size on insertion loss in the FX-LMS algorithm
-
-
-
-
-
-
-
171
Asnani - 14 Asnani - 16
d[m] e[m]
F [m] P ( z )
Sinewave
Generator x
0
[m] w
0
[m]
C ( z )
Canceling branch y[m]
1 –
90 Degree
Phase
Shift x
1
[m] w
1
[m]
ˆ
( z )
Balancing branch e'[m]
ˆ
( z ) LMS
Fig. 17 - Schematic of the single frequency adaptive noise equalizer (SFANE) should be synchronized to the disturbance frequency using a tachometer, for example. The operation of the SFANE is as follows. The reference signal, x to form the orthogonal signal, x x
0
[m] and x
1
1
[m], is shifted by 90 degrees
[m]. The quadrature signals,
[m], are then weighted by the adaptive gain parameters, w
0
[m] and w
1
[m], and added together to form the control signal, y[m]. Similar to the adaptive notch filter concept 5 , the control signal is a sinusoid of arbitrary amplitude and phase. However, the equalizer scheme differs from the notch filter in the following way: The control signal, y[m], is divided into two branches, the canceling branch and the balancing branch. In the canceling branch, y[m] is first scaled by the gain factor, 1β , then sent through the control path, C ( z ), to combine with the disturbance signal, d[m]. The combination of the disturbance and scaled control signals produces an error signal, expressed as e[m] = d[m] + ( 1 − β ) (5) where * is the convolution operator and c[m] is the impulse response of the control path transfer function, C ( z ). In the balancing branch y[m] is weighted by the gain factor, by the control path estimate, ˆC ( z
β
), and then added to the error signal, to produce a pseudo-error signal, expressed as
, filtered
' = e[m] + β ⋅
' e [m] = + ∗
∗
(6)
If we assume ĉ[m] = c[m], then inserting (5) into (6) shows that the pseudo-error signal takes the form of a standard ANC error signal,
(7)
Thus the pseudo-error signal can be fed back to the FX-LMS algorithm and the β parameter will not affect its performance.
In the steady-state, the pseudo-error signal is driven to zero at the reference frequency, ω algorithm. x
(rad/sam), by the FX-LMS
E ss
'
( ) = D
( ) ( ) ( ) = 0.
(8)
In (8) E ’ ss
( ω x
), D( ω x
), C( ω x
) and Y ss
( ω x
) are the discrete-time
Fourier transforms (DTFTs) of the steady-state pseudo-error, disturbance, control path impulse response, and steady-state control signal evaluated at the reference frequency. Using (8) and the DTFT of (5), the steady state error transform at the reference frequency is
E ss
= β D
( ) x
(9)
172 Noise Control Eng. J. 53 (5), 2005 Sept–Oct
F [m]
X
0,1
Sinewave
Generator
X
0,2
Sinewave
Generator
P ( z ) d[m]
SFANE 1
SFANE 2
(1–
1
)•y
1
[m]
1
•y
1
[m]
(1–
2
)•y
2
[m]
2
•y
2
[m]
C ( z ) e[m]
Control Off
-
-
-
-
-
-
-
-
-
-
-
-
130 -
120 -
110 -
100 -
90 -
80 -
70 -
60 -
50 -
40 -
30 -
20 -
Control On
50 -
40 -
30 -
20 -
10 -
130 -
120 -
110 -
100 -
90 -
80 -
70 -
60 -
-
-
-
-
-
-
-
-
10 -
0
211 226 241 256 271 286 301
0
211 226 241 256 271 286 301
Frequency (∆f = 0.025 Hz)
Fig. 20 - Control of the FM Case 1 disturbance using the ANE algorithm in cancellation model
-
-
-
-
X
0,K
Sinewave
Generator e'[m]
SFANE K
(1–
K
)•y
K
[m]
K
•y
K
[m]
ˆ
( z )
Fig. 18 - Schematic of the multi-frequency adaptive noise equalizer. Refer to Figure 17 for the single frequency adaptive noise equalizer (SFANE) schematic
Equation (9) shows that the β parameter is a linear gain for the closed loop system from the disturbance to error at the reference frequency. Depending on the choice of the β parameter, the single frequency ANE can cancel, attenuate, maintain, or augment the disturbance at the reference frequency.
Diego et al.
9 developed a method to combine multiple
SFANE structures such that the gains at each reference frequency are independent, as illustrated in Figure 18. The outputs of each SFANE add to the disturbance to form the error signal, e[m] = d[m] +
K k
∑
(1
= 1
− β k
{ ∗ }
(10)
In (10), the subscript k denotes a parameter of the k th SFANE in the system. Each SFANE operates on a different internally generated reference signal, x
0, k pseudo-error signal, e ’ [m], where
[m], but receive the same e [m] = e[m] +
K k
∑
= 1
β k
{ }
(11)
Plugging (10) into (11) shows that the pseudo error signal is unaffected by the output weighting and takes the form of the error signal in a parallel network of notch filters, 4
' = [ ] + k
K
∑
= 1
∗
(12)
Control Off
-
-
-
-
-
-
-
-
-
-
-
-
130 -
120 -
110 -
100 -
90 -
80 -
70 -
60 -
50 -
40 -
30 -
20 -
Control On
130 -
120 -
110 -
100 -
90 -
80 -
70 -
60 -
50 -
40 -
30 -
20 -
10 10 -
0
241 256 271
0
241
Frequency (∆f = 0.025 Hz)
256 271
Fig. 19 - Control of the AM Case 1 disturbance using the ANE algorithm in cancellation model
-
-
-
-
-
-
-
-
-
-
-
-
-
Noise Control Eng. J. 53 (5), 2005 Sept–Oct
Control Off
-
-
-
-
-
-
-
-
-
-
-
-
130 -
120 -
110 -
100 -
90 -
80 -
70 -
60 -
50 -
40 -
30 -
20 -
Control On
80 -
70 -
60 -
50 -
40 -
130 -
120 -
110 -
100 -
90 -
30 -
20 -
10 10 -
0
226 241 256
0
226
Frequency (∆f = 0.025 Hz)
241 256
Fig. 21 - Control of the AM Case 2 disturbance using the ANE algorithm in cancellation model
-
-
-
-
-
-
-
-
-
-
-
-
-
173
Asnani - 19 Asnani - 21
Control Off
-
-
-
-
-
-
-
-
-
-
-
-
130 -
120 -
110 -
100 -
90 -
80 -
70 -
60 -
50 -
40 -
30 -
20 -
Control On
80 -
70 -
60 -
50 -
40 -
130 -
120 -
110 -
100 -
90 -
30 -
20 -
10 -
-
-
-
-
-
-
-
-
10 -
0
196 211 226 241 256 271 286
0
196 211 226 241 256 271 286
Frequency (∆f = 0.025 Hz)
Fig. 22 - Control of the FM Case 2 disturbance using the ANE algorithm in cancellation model
-
-
-
-
Control Off
-
-
-
-
-
-
-
-
-
-
-
-
130 -
120 -
110 -
100 -
90 -
80 -
70 -
60 -
50 -
40 -
30 -
20 -
Control On
130 -
120 -
110 -
100 -
90 -
80 -
70 -
60 -
50 -
40 -
30 -
20 -
10 10 -
0
241 256 271
0
241
Frequency (∆f = 0.025 Hz)
256 271
Fig. 23 - Spectral shaping using the ANE algorithm for the AM
Case 1 example
-
-
-
-
-
-
-
-
-
-
-
-
-
Further analysis of the multi-frequency ANE can be found in reference 10.
For the AM signals, K = 3, such that the three disturbance frequencies can be controlled. In the FM case, with the ANE in cancellation mode ( β k
K
=0, for all k
= 7, and the carrier frequency plus the 3 closest sets of sidebands are targeted. The step sizes for the adaptive filters (updated with the
FX-LMS control law) in each SFANE are set at 0.01. Figure 19 through 22 show the results for both Case 1 and 2 disturbances
). For all cases the ANE completely cancels the disturbances, unlike the standard FX-LMS algorithm discussed in the previous section.
This result shows that the presence of frequency side-bands does not significantly influence the action of the ANE.
B. Spectral Shaping Using ANE
Figure 23 illustrates the ability of the ANE to independently and arbitrarily control the amplitudes of the components in a noise disturbance. The AM Case 1 is chosen as an example.
Here the equalizer is set to cancel the side-bands, β to double the amplitude of the carrier frequency, β
2
1,3
= 0, and
= 2. The residual error spectrum shows that the carrier frequency does in fact double in amplitude, while the side-bands are eliminated.
This would be practical in the case where audible information was necessary, say for the sake of safety around a rotating machine. Figure 24 shows the effect of this equalizer setting in the time domain. Notice that the control has eliminated variation in the time domain envelope and the residual error contains only a pure tone.
40 -
20 -
0 -
-20 -
-40
50 disturbances are typically identified by frequency side-bands about the primary spectral components. The presence of sidebands often leads to a time-varying envelope (including the beating type) which is generally perceived as objectionable by a human observer. The results of implementing alternate ANC algorithms on modulated sounds have been presented, in the context of an experimental duct system. The FX-LMS algorithm is first implemented as a benchmark case, while the ANE is presented as a viable alternative. The FX-LMS algorithm significantly reduced the total amplitude of both AM and FM disturbances, but the side-band structures tended to dominate the residual spectra. Frequency components in proximity of the system resonance also received more attenuation.
Subsequently, the ANE, used in the cancellation mode, is
0 -
0.1
Control Off
0.2
Control On
0.3 0.4
-
-
-
-
-
-
6. CONCLUSION
Modulated disturbances are commonly produced by rotating noise sources such as gears, bearing, and fans. These
-50
0.1 0.2 0.3
Time (sampling period = 0.0004 s)
0.4
Fig. 24 - Resulting time history from spectral shaping with the
ANE algorithm
174 Noise Control Eng. J. 53 (5), 2005 Sept–Oct
Asnani - 24
found to completely attenuate all frequency components for all cases of AM and FM disturbances. Additionally, this algorithm was used to shape the error spectrum of an AM disturbance to eliminate the beating phenomenon associated with the sidebands.
The results showed that the ANE has two key advantages over the FX-LMS algorithm for controlling modulated disturbances. First, complete cancellation of the carrier frequency and side-bands is possible. Second, it allows precise amplitude control over individual frequency components and so side-bands may be eliminated from a noise disturbance, while retaining some residual noise. However, the ANE requires that a separate reference signal is provided for each disturbance frequency. This might be practical in some situations, but would require prior knowledge of the carrier frequency (for example, a tachometer signal) and kinematic relationships between machine parts to predict the side-band frequencies. The FX-LMS algorithm, on the other hand, can operate on a measured reference signal without knowledge of the specific disturbance frequencies.
Our investigation shows that several interesting research studies are warranted. For example, one might analyze the optimal control studies, implemented in the frequency domain, to understand why the FX-LMS algorithm produces biased residual error spectra for AM and FM disturbances.
One could examine the possibility of weighting side-bands in the FX-LMS algorithm; this may, however, require an alternate representation. Further developments to the ANE concept could include a more refined frequency domain based algorithm that would be applicable to a broader class of quasi-periodic disturbances. This algorithm might utilize concepts similar to the frequency domain periodic noise equalizer developed by Kuo et al.
17 . A frequency domain controller would have the advantage of lower computational effort. Finally, such algorithms should be implemented in practical systems (including geared systems) where more complicated side-band structures are found as simple AM or
FM modulation theories may not explain the real-life noise or vibration signals.
12
7. REFERENCES
1 Dennis R. Morgan, “An analysis of multiple correlation cancellation loops with a filter in the auxiliary path,” IEEE Trans. on Acoustics, Speech, and
Signal Processing 28 (4), 454-467 (1980).
2 B. Widrow, D. Shur, and S. Shaffer, “On adaptive inverse control,” Proc.
3
15th Asilomar Conf (1981), pp. 185-189 (1981).
J. C. Burgess, “Active adaptive sound control in a duct: A computer
4 simulation,” J. Acoust. Soc Am. 70 (3), 715-725 (1981).
Sen. M. Kuo and Dennis R. Morgan, “Active noise control: A tutorial
5 review,” Proc. of the IEEE 87 (6) pp. 943-973 (1999).
Bernard Widrow, John R. Glover, Jr., John M. McCool, John Kaunitz,
Charles S. Williams, Robert H. Hearn, James R. Zeidler, Eugene Dong,
Jr. and Robert C. Goodlin, “Adaptive noise canceling: Principles and
6 applications,” Proc. of IEEE 63 (12), pp. 1692-1716 (1975).
Min J. Ji, and Sen M. Kuo, “An active harmonic noise equalizer,” Proc.
IEEE Int. Conf. Acoustics, Speech and Signal Processing , pp. 189-192
(1993).
7 Min J. Ji, and Sen M. Kuo, “Principle and application of adaptive noise
8 equalizer,” IEEE Trans. on Circuits and Systems 41 (7), 471-474 (1994).
Sen M. Kuo and Min J. Ji, “Development and analysis of an adaptive noise equalizer,” IEEE Trans. on Speech and Audio Processing 3 (3), pp. 217-222
(1995).
9 Maria de Diego, Alberto Gonzalez, Clemente García and Miguel Ferrer,
“Some practical insights in multichannel active noise control equalization,”
Proc. IEEE Int. Conf. Acoustics, Speech and Signal Processing , pp. 837-
10
840 (2000).
Maria de Diego, Alberto Gonzalez, Miguel Ferrer and Gema Piñero,
“Performance Comparison of multichannel active noise equalizers,” Proc.
ACTIVE 2002 , pp. 413 - 424 (2002).
11 G. Wesley Blankenship and Rajendra Singh, “New rating indices for gear noise based upon vibro-acoustic measurements,” Noise Control Eng. J.
38 (2), 81-92 (1992).
12 G. Wesley Blankenship and Rajendra Singh, “Analytical solution for modulation sidebands associated with a class of mechanical oscillators,”
J. of Sound and Vibration 179 (1), 13-36 (1995).
13 Yuan H. Guan, Teik C. Lim, and W. Steve Shepard, Jr., “Experimental study on active vibration control of a gearbox system,” J. of Sound and
Vibration 282 , 713 - 733 (2005).
14 Peter Mucci and Rajendra Singh, “Active vibration control of a beam subjected to AM or FM disturbances,” Noise Control Eng. J. 43 (5), 159-
171 (1995).
15 Sanjit K. Mitra, “Multirate Digital Signal Processing,” Chap. 10 in Digital
Signal Processing: A Computer Based Approach , 2nd Edition (McGraw-
Hill, New York, 2000).
16 Bernard Widrow, John M. McCool, Michael G. Larimore, C. Richard
Johnson, Jr., “Stationary and Nonstationary Learning Characteristics of the LMS Adaptive Filter,” Proc. of the IEEE 64 (8) pp. 1151-1162 (1976)
17 Sen M. Kuo, Mansour Tahernezhadi and Li Ji, “Frequency-domain periodic active noise control and equalization,” IEEE Trans. on Speech and Audio
Processing 5 (4), 348-358 (1997).
Noise Control Eng. J. 53 (5), 2005 Sept–Oct 175