Sensors and Actuators A 92 (2001) 182±190
Theory, modeling and characterization of PZT-on-alumina resonant
piezo-layers as acoustic-wave mass sensors
Vittorio Ferrari*, Daniele Marioli, Andrea Taroni
Dipartimento di Elettronica per l'Automazione and Istituto Nazionale Fisica della Materia INFM,
UniversitaÁ di Brescia, Via Branze 38, 25123 Brescia, Italy
Accepted 18 January 2001
Abstract
Lead zirconate titanate (PZT) ®lms screen-printed on alumina substrate form composite piezoelectric resonators that can be exploited as
acoustic-wave mass sensors. The paper presents a theoretical treatment of such layered resonators based on the use of the Mason's model to
derive the expression of the distributed-parameter electric impedance, followed by an approximation yielding a lumped-element equivalent
circuit valid around the sensor fundamental resonance. Expressions for the resonant frequency and mass sensitivity are obtained, which are
validated by experimental results relative to PZT thick-®lm sensors. The model is of general applicability, provided that the PZT and
substrate operate close to their quarter-wave resonance. # 2001 Elsevier Science B.V. All rights reserved.
Keywords: Acoustic-wave sensor; Mass sensor; Equivalent-circuit model; Piezoelectric resonator; Thick-®lm sensor
1. Introduction
Bulk acoustic-wave resonant piezo-layers (RPL) made by
lead zirconate titanate (PZT) ®lms on alumina substrate are
sensitive to an added surface mass and can be exploited for
gravimetric chemical sensing [1,2]. In contrast to homogeneous resonators, such as quartz crystal microbalance
(QCM) sensors, RPLs comprise a piezoelectric layer acoustically coupled to a non-piezoelectric substrate. Therefore,
they are inherently composite resonators.
Detailed mathematical treatments of multilayer composite resonators were developed by transfer matrix descriptions [3], perturbation methods [4], and acoustic
transmission-line theory [5,6]. Though such treatments
are complete and general in scope, their complexity makes
the analysis of the device behavior rather involved. On the
other hand, for sensor design and use, a simpli®ed reference
model based on manageable expressions and equivalent
circuits is desirable to gain ®rst-order insight into the
fundamental parameters in¯uencing the sensor operation.
In this perspective, the present work proposes a sensororiented approach to the analysis of RPL composite resonators which is based on a simple yet descriptive approximate model. The model leads to a lumped-element
*
Corresponding author. Tel.: 39-030-3715469; fax: 39-030-380014.
E-mail address: ferrari@bsing.ing.unibs.it (V. Ferrari).
equivalent circuit accounting for both the piezoelectric
and the substrate layers, and to explicit expressions
for the resonant frequency and the mass sensitivity. The
theoretical predictions are con®rmed by the presented
experimental results.
2. Theory and modeling
The RPL structure is made by the superposition of a nonpiezoelectric substrate, speci®cally alumina, a bottom-electrode layer, a PZT layer poled along its thickness, and a topelectrode layer. The overall thickness is small compared to
the lateral dimensions. An alternating voltage across the
electrodes can set the composite structure in thickness±
expansion resonance. A mass load on the top electrode causes
a shift in the resonant frequencies. Therefore, the RPL can be
exploited as an acoustic-wave mass microbalance sensor.
The present analysis is based on the following simplifying
assumptions.
The resonator lateral dimensions are indefinitely large,
and the wave propagation is assumed to be purely planar
along the thickness without boundary effects.
The metal electrodes are considered infinitely thin, therefore they are neglected.
Dissipative effects are not taken into account, therefore a
loss-free system is assumed.
0924-4247/01/$ ± see front matter # 2001 Elsevier Science B.V. All rights reserved.
PII: S 0 9 2 4 - 4 2 4 7 ( 0 1 ) 0 0 5 6 1 - 1
V. Ferrari et al. / Sensors and Actuators A 92 (2001) 182±190
183
Eq. (3) can be solved in the harmonic regime taking into
account the boundary conditions at the bottom and top faces
which, assuming the velocity to be positive for particle
motion directed inward to the PZT, are
z_ z 0 z_ bottom ;
Fig. 1. Simplified monodimensional structure of a resonant piezo-layer
sensor with load.
The coating layer is uniform and constant in thickness
over the top surface of the resonator.
Under these assumptions the problem can be analyzed
with reference to the simpli®ed monodimensional structure
of Fig. 1.
The used symbols have the following meanings. The
subscripts P, A and L refer to the PZT, alumina substrate
and loading layer, respectively. The symbols l, r and Y are
the thickness, density and elastic modulus. A is the electrode
area. Z o rv rY1=2 is the characteristic acoustical
impedance, and v Y=r1=2 is the acoustic wave speed.
b o=v is the wave propagation constant in a given medium at the angular frequency o.
Inside the PZT, the following piezoelectric constitutive
equations hold [7]:
T YPD S
hD
(1a)
E
1
D
eS
(1b)
hS
where T, S, E and D are respectively the stress, strain, electric
field and electric displacement, which are all functions of
both the vertical position z and the time t. YPD and eS are
respectively the stiffened elastic modulus, i.e. at zero electric
displacement, and the clamped dielectric permittivity, i.e. at
zero strain. The coefficient h is equal to e/eS, where e is the
piezoelectric stress constant.
In addition to Eqs. (1a) and (1b), inside the PZT it is valid
the Newton's law
dT
d2 z
dz_
rP 2 rP
dz
dt
dt
(2)
where z and z_ dz=dt are the particle displacement and
velocity, respectively.
By differentiating Eq. (1a) with respect to the position z
and inserting Eq. (2), considering that S dz=dz, and that
for an insulator as PZT it is dD=dz 0, it follows the
longitudinal-wave equation for the velocity
d2 z_
dz2
rP d2 z_ d2 z_
1 d2 z_
0
(3)
YPD dt2 dz2
vP 2 dt2
p
Since the term YPD =rP represents the acoustic speed vP
along the PZT thickness, it can be noticed that the wave
propagation parallel to the poling direction is governed by
the piezoelectrically-stiffened elastic modulus YPD .
z_ z lP
z_ top
(4)
If the force F AT acting on the PZT faces is now
considered, by rearranging the solution of Eq. (3) with
the conditions (4) and inserting into Eq. (1a), it can be
obtained
"
#
z_ top
z_ bottom
h
(5a)
I
Fbottom jAZoP
jo
tan bP lP sin bP lP
"
#
z_ top
z_ bottom
h
Ftop jAZoP
(5b)
I
jo
sin bP lP tan bP lP
where the electric current I is given by I A dD=dt
joAD.
According to the direct electromechanical analogy,
which relates force to voltage and velocity to current, the
quantities Zbottom Fbottom =z_ bottom and Ztop Ftop =z_ top are
the mechanical impedances presented by the PZT at the
bottom and top faces, respectively.
Considering now the Eq. (1b), the voltage V across the
PZT can be expressed as
Z lP
Z lP
lP
V
E dz h
S dz S D
e
0
0
i
h h_
1
zbottom z_ top
I
(6)
j
o
joC0
where C0 AeS =lP is the clamped electrical capacitance.
Therefore, the PZT can be seen as a three-port network
with two mechanical ports and one electrical port, respectively, described by Eqs. (5a), (5b) and (6), which can be
®nally summarized in the following matrix form:
3
2
AZoP
AZoP
h
6 tan b lP sin b lP
2
3
2
3
o 7
P
P
7 z_
6
Fbottom
bottom
7
6 AZ
AZoP
h 76 _
6
7
6
7
oP
74 ztop 5
4 Ftop 5 j6
6 sin bP lP tan bP lP
o 7
7
6
V
I
4
h
h
1 5
o
o
oC0
(7)
The mathematical expressions in Eq. (7) correspond to the
Mason's distributed-parameter electromechanical circuit
shown in the dashed portion of Fig. 2, which represents
the PZT film as a three-port element [8]. The negative
capacity C0 arises because the wave propagation is along
the electric field direction [7].
The effect of the alumina substrate and the upper loading
layer can be taken into account by connecting the respective
mechanical impedances to the appropriate mechanical ports
of the PZT circuit. According to the acoustic transmission
184
V. Ferrari et al. / Sensors and Actuators A 92 (2001) 182±190
Fig. 2. Distributed-parameter equivalent circuit of a resonant piezo-layer sensor with load. The dashed rectangle includes the Mason's model of the PZT film.
line theory, the mechanical impedance of a medium with
propagation constant b and characteristic impedance Zo at a
distance x from a terminating load impedance ZT is given
by [8]
Zx Zo
ZT jZo tan bx
Zo jZT tan bx
(8)
If the surrounding air is considered a stress-free boundary
(T 0), then the sides of the alumina and the loading layer
opposite to the PZT are terminated by a mechanical short
circuit (ZT 0). Therefore, the complete model of Fig. 2 can
be finally obtained.
The mechanical impedance at the nodes C±D is
ZCD
jAZoL tan bL lL jAZoL bL lL jAorL lL jomL
where the symbol || denotes the parallel connection of
impedances.
The condition of mechanical resonance Z CD 0 corresponds to Ze ! 1, i.e. to the electrical antiresonance.
Conversely, the electrical resonance Ze 0 occurs for
ZCD N 2 =joC0 . In the following, the fundamental-mode
resonance will be considered, with its associated resonant
frequency f1 o1 =2p.
In the absence of the load, Eq. (9) simpli®es to
AZoP tan P ZoA tan A
j tan P 2 tan P=2 ZoA =ZoP tan A
(12)
Therefore, an acoustically thin load behaves as a concentrated mass and makes the resonator work in the gravimetric
regime [9,10]. Such a circumstance is typically encountered
AZoP tan P ZoA tan A ZoL tan L ZoA =ZoP tan P tan A 1
j tan P 2 tan P=2 ZoA =ZoP tan A ZoL =ZoP tan L
where P bP lP olP =vP ; A bA lA olA =vA , and L
bL lL olL =vL . This reflects into an electrical impedance Ze
at the nodes A±B given by
V
1
ZCD
1
Ze ZAB
(10)
I
joC0
N 2 joC0
ZCD
respective quarter-wave resonance. This is what typically
happens for RPLs of PZT thick films on alumina, as it is
demonstrated in Fig. 3 which graphically shows the solution
of Z CD 0 for lA 254 mm and lP 100 mm.
If the load is now taken into account, and it is assumed to
be acoustically thin, i.e. no signi®cant phase shift of the
propagating wave is developed along the load thickness, it
can be written
(9)
in acoustic-wave chemical sensors operated in air, representing the original application of RPL sensors [2,11], in
which the load is essentially made by the mass increase of a
thin sorption layer sensitive towards the target analytes. As
long as mL is suitably small, the first resonance f1 again
remains located in the region where both tan P and tan A
(11)
If ZoA and ZoP are of the same order of magnitude and the
terms lP =vP and lA =vA differ by less than about 50%, then
ZCD firstly vanishes at a frequency f1 where both P and A are
close to p/2, i.e. the PZT and the substrate operate about their
Fig. 3. Graphical solution of Z CD 0 for a PZT film on alumina substrate
with respective thickness of 100 and 254 mm.
V. Ferrari et al. / Sensors and Actuators A 92 (2001) 182±190
185
diverge. The tangent function around its singularity at p/2
can be approximated by the formula tan X 8X= p2 4X 2
[7,8].
After insertion in Eq. (9) and some rearrangements,
it can be obtained the following approximated expression
of ZCD
p2 4P2
p2 4A2 mL
HZoA
ZCD A ZoP
j8P
j8A
A
2 D
lP rP
lA rA mL
1 p YP
p2 YA
H
H
A jo
jo 8lP
2
2
A
8lA
(13)
2
2
where H ZoP
=ZoA
.
Eq. (13) interestingly indicates that, around f1, the RPL
composed resonator can be approximately considered as a
homogeneous resonator with an unloaded effective mass
Meff A lP rP HlA rA =2, and an effective stiffness
Keff p2 A=8 YPD =lP H YA =lA .
Fig. 4 compares the extended acoustical impedance ZCD/A
of Eq. (11) with the approximation of Eq. (13), calculated for
an unloaded sensor with lP 100 mm and lA 254 mm. The
model locates the ®rst resonance f1 at 6.9 MHz with a ®tting
agreement of about 5%, while the second harmonic at f2, as
expected, is not spotted.
The electrical impedance Ze can now be derived by
substituting Eq. (13) into Eq. (10), leading to the lumpedelement equivalent circuit of Fig. 5. This can be seen as an
extension of the Butterworth-Van Dyke (BVD) circuit for
homogeneous resonators [12] to the case of a composite
resonator.
The equivalent circuit values are the following:
C0
eS A
;
lP
N
1 AlP rP
;
N2 2
H AlA rA
;
LA 2
N
2
LP
eA
hC0 ;
lP
mL
;
N2
Z2
H 2oP
ZoA
Lm
CP N 2
CA
8lP
2
p AYPD
;
N 2 8lA
;
H p2 AYA
(14)
Fig. 4. Acoustical impedance at nodes C±D of Fig. 2 for the distributedparameter (- - -) and lumped-element (Ð) models.
Fig. 5. Lumped-element equivalent circuit of a loaded RPL sensor valid
around the fundamental resonance.
The unloaded resonant frequency, corresponding to the
parallel electrical resonance fp, is then given by
r 1
CP CA
1 hpi 1
L P LA
LT CT
2p
CP CA
s
r
1
p2 =8 YPD =lP H YA =lA
1
Keff
2p
lP rP =2 H lA rA =2
2p Meff
fp
1
2p
(15)
where LT Meff =N 2 and CT N 2 =Keff represent the total
electrical inductance and capacitance that are the analog
equivalents of the mechanical effective mass and compliance participating in the first vibration mode.
The resonant frequency does not depend on the electrode
area A, in accordance with the assumption of in®nite lateral
dimensions.
The model consistently describes the limiting case of
ZoA ! 1, where the PZT ®lm works as a rigidly-backed
resonator with the alumina face acting as a perfectly re¯ecting surface. In fact, if ZoA ! 1 it follows that
LT ! LP and CT ! CP , causing fp to become the rigidlybacked resonant frequency fprb vP =4lP, which is what is
expected for a quarter-wave resonator.
On the contrary, the model fails in representing the freelysuspended limiting case given by ZoA 0, which apparently
leads to the non-physical condition LT ! 1 and CT ! 0.
This, however, is not surprising because the basic assumption on which the lumped-element circuit is derived from
Eq. (11), i.e. both tan P and tan A diverge around the
resonant frequency, breaks down for ZoA 0. Therefore,
in this case, reference must be made back to Eq. (11), which
for ZoA 0 reduces to ZCD AZoP = j2 tan P=2. If ZCD is
expanded around the ®rst resonance correspondent to
P=2 p=2, it follows that LT and CT now reduce to the
freely-suspended inductance and capacitance of the PZT,
2
fs
2
given by Lfs
P AlP rP = 8N LP =4 and CP 8N lP =
2
D
p AYP CP . This simpli®es the model of Fig. 5 to the
186
V. Ferrari et al. / Sensors and Actuators A 92 (2001) 182±190
usual BVD circuit of a free-standing unperturbed resonator,
and leads to the freely-suspended resonant frequency
fpfs vP =2lP , corresponding to half-wave resonance.
The formulation based on the lumped-element parameters
of Eq. (15) suggests a possibility to formally extend the
present lossless model to the case when losses due to internal
friction within the PZT and alumina substrate are considered. In such a case, the elastic moduli of both PZT and
substrate become complex and given by Y Y 0 jY 00 where
Y 00 oZ and Z is the material viscosity.
Under this assumption, two equivalent resistors Rp and RA
appear in series to the equivalent capacitances Cp and CA in
the lossless circuit of Fig. 5. The expressions of these
resistors are
ZP
HZ
RP
; RA 2 0 A
(16)
0
N YA CA
N 2 YPD CP
The overall dissipation in the composite resonator is not
lower than that arising from RP and RA and, due to the fairly
dishomogeneous and porous nature of PZT thick films, it can
be guessed that RP most likely dominates over RA. In
addition, other dissipation factors, such as those caused
by the electrodes and the radiation losses, must be also
considered in real devices. Globally, they determine the
quality factor Q of the resonator.
Coming back to the lossless model, if now fpL indicates
the resonant frequency when the resonator is loaded, the
fractional mass sensitivity Sm can be de®ned as
Sm lim
mL !0
Dfp =fp
fpL fp
lim
m
!0
mL
fp mL
L
(17)
where, according to Eq. (13) and Fig. 5, fpL corresponds to a
total vibrating mass of Meff mL , associated with a total
inductance LT DLT .
For mL =Meff DLT =LT ! 1, Eq. (15) can be linearized as
Dfp =fp DLT =2LT mL =2Meff .
Then the following expression for Sm results
Sm
1
2N 2 LT
1
2Meff
1
A lP rP HlA rA
(18)
The same result can alternatively be obtained by using
differentials into the definition of Sm. In this way,
Eqs. (15) and (17) directly lead to Sm dfp =fp dmL
1=2Meff dMeff =dmL 1=2Meff
because,
as
expressed by Eq. (13), it is dMeff =dmL 1.
Eq. (18) is consistent with the generalized form of the
mass sensitivity of acoustic-wave sensors [13], in which Sm
is inversely proportional to the resonator effective mass
participating in the particular vibration mode.
3. Sensor fabrication
The RPL sensors were fabricated by screen printing PZT
thick ®lms on 96% alumina substrates using a purposely
prepared paste. This was made by mixing a PZT powder
(Ferroperm PZ26) with 20 wt.% of PbO and adding a
solution of ethylcellulose and terpineol as the liquid vehicle
[1,2]. For the metal electrodes, a PdAg ink (Heraeus
C1214D) was used. The following process steps were
followed in the manufacturing:
1. Screen printing of the bottom electrode, drying at 1508C
for 30 min, firing at 8508C peak temperature for 30 min.
2. Screen printing of the PZT, drying at 1508C for 30 min,
firing at 9508C peak temperature for 30 min. Multiple
print-dry-fire steps were carried out up to the final film
thickness.
3. Same as (1) for the top electrode.
4. Poling of the PZT by applying an electric field of 5 MV/
m at 1508C for 30 min.
The alumina substrates had dimensions of 25 mm
25 mm, and thickness lA of 254 mm, as speci®ed by the
manufacturer. The planar shape of the sensors was circular with PZT and electrode diameters of 6 and 5.5 mm,
respectively.
For the PZT ®lms the thickness lP varied among different
sensors, taking the values of 90, 95 and 100 mm. The
thickness lP were measured with a linear-variable-differential-transformer (LVDT) transducer leading to an estimated
uncertainty of 2.5 mm. The thickness of the metal elctrodes
was about 10 mm.
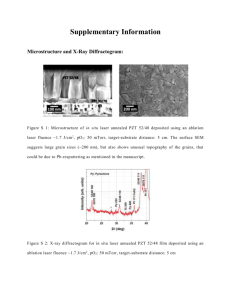
A SEM photograph of a 100 mm thick sensor is shown in
Fig. 6, evidencing a good compactness of the PZT compared
to the electrodes and the substrate, and also validating the
thickness measurement made with the LVDT.
The relevant material parameters are the following: rA
3:7 103 kg/m3, rP 5 103 kg/m3, Y A 330 GPa, YPD
31:2 GPa. The parameter values for alumina are taken from
tabulated data. For the PZT ®lms rP was measured by
weighting, and YPD could be derived by a numerical ®t over
the fundamental resonance and the second harmonic of the
measured impedance Ze(o) against the expressions of
Eqs. (10) and (11) for sensors with different PZT thickness.
Notably, both rP and YPD are lower than the correspondent
parameters for bulk sintered ceramic due to the porous
microstructure of PZT thick ®lms [14].
4. Experimental results
4.1. Resonant frequency
The impedance spectrum around the fundamental resonant frequency was measured for all the sensors with a
HP4194A impedance analyzer.
The plot in Fig. 7, which refers to a 90 mm sensor, shows
an example of the typical results obtained. The parallel
resonant frequency fp can be assumed to be the frequency
where the phase crosses the Ze 0-axis with a negative
slope. This is strictly true for an ideal undamped resonator
[15], while in the real case it is a convenient approximation.
V. Ferrari et al. / Sensors and Actuators A 92 (2001) 182±190
187
Fig. 6. SEM photograph of a RPL sensor made by a PZT thick film screen printed on alumina substrate. The insert shows a close-up of the PZT
microstructure.
For the sensor of Fig. 7 the measured quality factor Q at fp,
de®ned as Q fp =2 dF=dfp where F is the phase in
radiants, is larger than 60, but higher values are possible [2].
The plot in Fig. 8 refers to a 100 mm sensor and shows an
enlarged portion of the frequency scale to include also the
second harmonic f2. It can be observed that Q at f2 is lower
than at the fundamental frequency f1, as demonstrated by the
reduced phase step around f2. This same behavior was
observed for all of the sensors.
For the sensors with lP of 90, 95 and 100 mm the measured
fundamental resonant frequencies were 7.16, 6.91 and
6.85 MHz, respectively, which agree with the predictions
of Eq. (15) within about 5%.
4.2. Derivation of the piezoelectric parameters of PZT
Making use of the HP4194A analyzer, the measured
impedance spectrum of Fig. 7 was ®tted to the BVD
equivalent circuit of Fig. 9, allowing to extract the parameter
values reported in the ®gure. By comparison with the model
of Fig. 5 and using the parameter expressions given in
Eq. (14), it can be obtained
Fig. 7. Measured impedance around the first resonance of a RPL sensor
with a PZT thickness of 90 mm.
Fig. 8. Measured impedance of a 90 mm RPL sensor vs. frequency
including the fundamental and second harmonic resonances.
L LT
Meff
l2P
lP rP HlA rA
N2
2e2 A
(19)
Fig. 9. BVD equivalent circuit and parameter values extracted from the
fitting of the impedance spectrum of Fig. 7.
188
V. Ferrari et al. / Sensors and Actuators A 92 (2001) 182±190
Eq. (19) can then be solved for the piezoelectric constant e.
Considering that A 2:37 10 5 m2, and H 0:127, it
results e 7:64 As/m2.
From the relationship e dYPD it is then possible to
calculate the piezoelectric coef®cient d, resulting in
d 245 10 12 As/N.
The above values of e and d agree in order of magnitude
with the typical values of PZT, even if they are lower than
those obtainable in bulk sintered ceramic [16].
From the value of Cb in Fig. 9, equal to C0 in the model of
Fig. 5, the clamped permittivity can be obtained given by
eS C0 lP =A 4:82 10 9 F/m, corresponding to a relative permittivity of about 545.
For a freely-suspended resonator, when the frequency is
decreased much below resonance the permittivity is
expected to increase, as the piezoelectric element passes
from a clamped condition to an increasingly free condition.
As a limit, the low-frequency capacitance C0lf should be
governed by the stress-free permittivity eT eS = 1 k2 ,
where k2 is the effective electromechanical coupling factor
relative to the resonator con®guration [17].
On the contrary, for the RPL sensor, the measured values
of C0lf at 1 kHz was found to be 1.22 nF which is substantially equal to C0. A reasonable explanation of this fact could
be that, due to the presence of the substrate, the PZT ®lm
unavoidably experiences lateral clamping and is never completely stress-free. A three-dimensional analysis, such as in
[18], accompanied by further experimental data could possibly provide clari®cation on this issue.
As a general observation, the high value of the dielectric
permittivity of RPLs made of PZT, as opposed to quartz
microbalances, implies quite large values of C0. This has the
advantage of making the resonant frequency fp minimally
affected by the parasitic capacitances in parallel to the
sensor, and therefore, it increases the accuracy with which
an electronic oscillator can track fp, especially when sensor
and electronics are separated by some distance.
4.3. Mass sensitivity
The mass sensitivity of the sensors was measured by
casting with a micropipette prescribed volumes of a
®xed-titre solution of silicone grease in ether, waiting until
solvent evaporation, and measuring the correspondent frequency [1,2]. The procedure ensured that the resulting ®lms
coated a sensor area A of (2:37 10 5 5%) m2. It should
be noted that the quoted uncertainty on the covered area A
does not merely arise from a dimensional issue, but rather
accounts for an estimation of the effect due the lateral
®niteness of the real resonator. This causes the vibration
amplitude to decrease toward the PZT boundary, and as
opposed to what predicted from the simpli®ed monodimensional model, ultimately produces a radial dependence of the
mass sensitivity which is quantitatively unknown. As the
adopted deposition method provides control of the overall
loading mass only, and not of the surface mass density, the
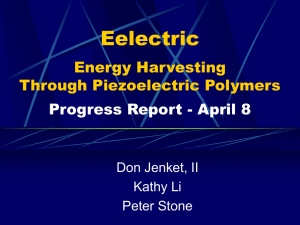
Fig. 10. Measured frequency shift vs. mass load for RPL sensors with
different PZT thickness.
integral effect over the coated area is what is actually
observed therefore limiting the accuracy that can be attributed to the effective value of A.
Assuming for the density and wave velocity of the coating
®lms the approximated values of 1 103 kg/m3 and
1 103 m/s, respectively, according to Eq. (12) a load of
up to 100 mg can be considered acoustically thin at 7 MHz
within an error of <2%, and the lumped-parameter model of
Fig. 5 can be therefore applied. Similarly, for the same
loading range, the linearized form of the mass sensitivity
given in Eq. (18) can be used to predict the loaded resonant
frequency with negligible errors.
Fig. 10 shows the results obtained by measuring fp with
the impedance analyzer for three different sensors at varying
the mass load. The trends are linear in good agreement with
the predictions of Eq. (18). The sensitivity is comparable to
that of QCM sensors at the same frequency [12].
The data are ordered as expected with respect to the PZT
thickness lP, as demonstrated by Fig. 11 which plots the
inverse of the fractional mass sensitivity Sm as a function of
lP, and compares the measured and the theoretically predicted values. The error bars on the theoretical values
account for the estimated uncertainty in the PZT thickness
(2.5 mm on the X-axis), and in the coated area A (5% on
the Y-axis). Within such intervals the agreement is met. The
fact that the measured sensitivity is lower than predicted can
Fig. 11. Comparison between the measured (*) and the theoretically
predicted (*) values of the inverse of the fractional mass sensitivity versus
the PZT thickness.
V. Ferrari et al. / Sensors and Actuators A 92 (2001) 182±190
189
An analysis of acoustic-wave mass sensors made by
thickness-mode composite resonators of PZT layers on
non-piezoelectric substrate has been developed.
For sensors in which both PZT and substrate operate close
to their quarter-wave resonance, a lumped-element model
valid around the fundamental resonant frequency has been
derived.
The theoretical predictions of resonant frequency and
mass sensitivity approximate well the measurement results
for sensors made by PZT thick ®lms on alumina, and are
expected to be extendible to sensors made in different
technologies.
The proposed model can be readily used in the design of
gravimetric chemical sensors based on RPLs, and to derive
from resonance measurements the mechanical and piezoelectric parameters of substrate-supported piezoelectric ®lms.
[3] H. Nowotny, E. Benes, General one-dimensional treatment of the
layered piezoelectric resonator with two electrodes, J. Acou. Soc.
Am. 82 (2) (1987) 513±521.
[4] Z. Wang, D.N. Cheeke, C.K. Jen, Perturbation method fo analyzing
mass sensitivity of planar multilayer acoustic sensors, IEEE Trans.
UFFC 43 (5) (1996) 844±851.
[5] V. Edwards Granstaff, S.J. Martin, Characterization of a thicknessshear mode quartz resonator with multiple nonpiezoelectric layers, J.
Appl. Phys. 75 (3) (1994) 1319±1329.
[6] K.M. Lakin, G.R. Kline, K.T. McCarron, High-Q microwave acoustic
resonators and filters, IEEE Trans. Microwave Theory Tech. 41 (12)
(1993) 2139±2146.
[7] T. Ikeda, Fundamentals of Piezoelectricity, Oxford University Press,
Oxford, 1989.
[8] W.P. Mason, Electromechanical Transducers and Wave Filters, Van
Nostrand, New York, 1948.
[9] R. Lucklum, P. Hauptmann, Mass sensitivity, viscoelasticity and
acoustic amplification of acoustic-wave microsensors, in: Proceedings of the Eurosensors XIII, The Hague, 12±15 September 1999,
pp. 453±456.
[10] R.W. Cernosek, S.J. Martin, A.R. Hillman, H.L. Bandey, Comparison
of lumped-element and transmission-line models for thickness-shearmode quartz resonator sensors, IEEE Trans. UFFC 45 (5) (1998)
1399±1407.
[11] V. Ferrari, D. Marioli, A. Taroni, E. Ranucci, P. Ferruti, Gravimetric
chemical sensors in thick film technology with hybrid electronics, in:
Proceedings of SAA'96 Ð National Meeting on Sensors for
Advanced Applications, Vol. 54, Brescia, 16±17 May 1996, SIF,
Bologna, 1997, pp. 3±10.
[12] D.S. Ballantine, R.M. White, S.J. Martin, A.J. Ricco, E.T. Zellers,
G.C. Fryre, H. Wohltjen, Acoustic Wave Sensors, Academic press,
San Diego, 1997.
[13] Z. Wang, J.D.N. Cheeke, C.K. Chen, Unified approach to analyse
mass sensitivities of acoustic gravimetric sensors, Electr. Lett. 26
(18) (1990) 1511±1513.
[14] G. De Cicco, B. Morten, M. Prudenziati, Piezoelectric thick-film
sensors, in: M. Prudenziati (Ed.), Thick Film Sensors, Elsevier,
Amsterdam, 1994, pp. 209±228.
[15] IEEE Standard on Piezoelectricity, ANSI/IEEE Std 176±1987,
Institute of Electrical and Electronic Engineers, New York, 1987.
[16] J.W. Waanders, Piezoelectric Ceramics, Philips Components, Ehindhoven, 1991.
[17] M. Onoe, H. Jumonji, Useful formulas for piezoelectric ceramic
resonators and their application to measurements of parameters, J.
Acou. Soc. Am. 41 (4) (1967) 974±980.
[18] M. Brissaud, Characterization of piezoceramics, IEEE Trans. on
UFFC 38 (6) (1991) 603±617.
Acknowledgements
Biographies
be partly due to the metal electrodes which increase the
sensor effective mass.
4.4. Temperature effect
The above experimental results were all obtained at 238C.
It was shown previously [2] that the resonant frequency is
dependent on temperature with a coef®cient that, for sensors
with lA 254 mm and lP 100 mm, is in the order of
70 ppm/8C at room temperature. Further investigations
are needed to assess how such a variation depends on the
ratio lP/lA and, possibly, on the sensor average temperature
itself.
The present model, according to Eq. (15), is expected to
be helpful in quantifying how the contributions of the
distinct parameters of PZT and substrate concur to the
overall temperature coef®cient of frequency, and, as a consequence, it may possibly suggest a proper choice of lA and
lP in order to reduce such a thermal dependence.
5. Conclusions
The contribution by P. Ghignatti and D. Lauri in the
laboratory activity is greatly acknowledged. The research
project is co-funded by the Italian MURST (1999).
References
[1] V. Ferrari, D. Marioli, A. Taroni, Thick film resonant piezo-layers as
new gravimetric sensors, Meas. Sci. Technol. 8 (1) (1997) 42±48.
[2] V. Ferrari, D. Marioli, A. Taroni, E. Ranucci, Multisensor array of
mass microbalances for chemical detection based on resonant piezolayers of screen-printed PZT, in: Proceedings of the Eurosensors
XIII, The Hague, 12±15 September 1999, pp. 949±952, Sens.
Actuators B68, (2000) 81±87.
Vittorio Ferrari was born in Milan, Italy, in 1962. In 1988, he obtained the
Laurea degree in Physics at the University of Milan. In 1993, he received
the Research Doctorate degree in Electronic Instrumentation from the
University of Brescia, Italy. He is currently Researcher and Assistant
Professor at the Faculty of Engineering of the University of Brescia, where
he teaches Electronics. His research activity deals with electronic
measuring instrumentation, sensors for physical and chemical quantities,
and the related signal-conditioning electronics. In particular, he is
presently involved with piezoelectric acoustic-wave sensors in thick-film
technology, design of oscillator circuits and frequency-output signal
conditioners.
Daniele Marioli was born in Brescia, Italy, in 1946. He obtained the
Electrical Engineering degree in 1969. From 1984 to 1989 he was an
Associate Professor in Applied Electronics and since 1989 he has been a
Full Professor of Electronics at the University of Brescia. His main field of
190
V. Ferrari et al. / Sensors and Actuators A 92 (2001) 182±190
activity is the design and experimentation of analog electronic circuits for
the processing of electrical signals from transducers, with particular regard
to S/N ratio optimization.
Andrea Taroni was born in 1942. He received the degree in Physical
Science from the University of Bologna, Italy, in 1966. He was an
Associate Professor at the University of Modena from 1971 to 1986. Since
1986 he has been Full Professor of Electrical Measurements at the
University of Brescia. He has done extensive research in the field of
sensors for physical quantities and electronic instrumentation, both
developing original devices and practical applications. He is author of
more than 100 scientific papers.