Quin Systems Limited
SRV-2 Issue F Hardware Manual
Issue 2
October 2004
MAN544
Important Notice
Quin Systems reserves the right to make changes in the products described in this
document in order to improve design or performance and for further product
development. Examples given are for illustration only, and no responsibility is assumed
for their suitability in particular applications. Reproduction of any part hereof without
the prior written consent of Quin Systems is prohibited.
Although every attempt has been made to ensure the accuracy of the information in this
document, Quin Systems assumes no liability for inadvertent errors.
Suggestions for improvements in either the products or the documentation are
welcome.
Relevant Directives
The product is designed to be incorporated into a system for the control of machinery,
and needs external equipment to enable it to fulfil this function. It must not be relied
upon to provide safety-critical features such as guarding or emergency stop functions.
It must not be put into service until the machinery into which it has been incorporated
has been declared in conformity with the Machinery Directive 89/392/EEC and/or its
relevant amendments.
The installation instructions in this manual should be followed in constructing a system
which meets requirements.
The product has been tested in typical configurations, and meets the EMC Directive
89/336/EEC, when fed from power supplies which meet 89/336/EEC and 92/31/EEC.
The product uses only low voltages, and is therefore exempt under 73/23/EEC as
amended by 93/68/EEC.
The product as normally supplied has low voltages accessible to touch, and must be
mounted within a suitable cabinet to meet any required IP rating to BS EN 60529.
Issue 2
SRV-2 Issue F Hardware Manual
Copyright Notice
Copyright © 2004 Quin Systems Limited. All rights reserved.
Reproduction of this document, in part or whole, by any means, without the prior
written consent of Quin Systems Limited is strictly prohibited.
Version History
Issue
Date
Update Reason
1
Aug 1996
(Board iss B)
2
Oct 2004
Covers iss E, iss F board
Amendment Record
Date
Issue
Amdt.
Copyright © 2004 Quin Systems Ltd.
Pages
By
Reason
Page iii
SRV-2 Issue F Hardware Manual
Page iv
Issue 2
Copyright © 2004 Quin Systems Ltd.
Issue 2
SRV-2 Issue F Hardware Manual
Contents
1.
Introduction
3
2.
Description of Operation
4
3.
Using The SRV-2 Module
5
3.1
3.2
3.3
3.4
3.5
3.6
3.7
3.8
3.9
3.10
5
5
6
6
6
6
6
7
7
8
4.
Configuration
4.1
4.2
4.3
4.4
4.5
4.6
4.7
4.8
4.9
5.
6.
General
Incremental Encoder Inputs
Link Encoder Output
Absolute Encoders
Analogue Outputs
Analogue Inputs
Relay Contacts
Serial Ports
CANbus Interface
Digital Inputs and Outputs
Processor Options : J1
Reset and watchdog enable : J2
Interrupt Configuration : J3
SSI Clock Signals : J4
Eprom Device Select : J5
Ram Device Select : J6
Spare Duart Inputs : J7
Serial Port A Overide : J8
Jumper Locations
9
9
9
9
10
10
10
11
11
12
Connections
13
5.1
5.2
5.3
5.4
5.5
5.6
5.7
5.8
5.9
13
14
14
14
15
15
15
16
18
Connector layout
Signal Names
Power Supplies
Serial Ports
CANbus Interface
Encoder Connections
Background Debug Connector
Screw Terminal Connections
CPLD Download
SRV2 Flashboot Sector
19
6.1
6.2
19
19
Switch-on Self-Test
Entry to Flashboot Diagnostics
Copyright © 2004 Quin Systems Limited
Page 1
Issue 2
SRV-2 Issue F Hardware Manual
List of Figures
Figure 1.
Encoder input circuits.
5
Figure 2.
Isolated inputs and outputs
8
Figure 3.
Interrupt Configuration : J3
9
Figure 4.
SSI Clock Signals : J4
10
Figure 5.
Eprom device select : J5
10
Figure 6.
Ram device select : J6
10
Figure 7.
Spare Duart Inputs : J7
11
Figure 8.
Serial Port A Override : J8
11
Figure 9.
Jumper locations
12
Figure 10.
SRV-2 layout
13
Table 11.
Serial port connections : ports A–B
14
Table 12.
CANbus connections
15
Table 13.
Encoder connections
15
Table 14.
Background Debug Connector
15
Table 15.
Back screw terminal connections
16
Table 16.
Bottom screw terminal connections
17
Copyright © 2004 Quin Systems Limited
Page 2
Issue 2
1.
SRV-2 Issue F Hardware Manual
Introduction
This document describes the Quin Systems SRV-2 two/three axis digital servo control
module, issue F. Earlier issues differ slightly, generally as noted.
The SRV-2 module is a complete control system for two or three servo motors. It is
designed for use in standalone applications. Its output signals are compatible with most
motor drive systems. Note that in most applications the high power drive system should
be selected for the particular motors used to provide the required system performance.
The SRV-2 module has its own processor with private program and data memory. It is
normally supplied with comprehensive firmware which performs all the real-time
functions and interfacing for the servo system. The module includes three inputs for
incremental position encoders and a buffered link encoder output, three analogue
inputs, three analogue outputs for the motors and a fourth for a monitor signal, sixteen
digital inputs, eight digital outputs, two serial ports, and a CANbus interface. All
encoder input signals and digital input/output signals are optically isolated. The serial
ports may be configured for either RS-232 or RS-485 operation.
Copyright © 2004 Quin Systems Limited
Page 3
Issue 2
2.
SRV-2 Issue F Hardware Manual
Description of Operation
This section gives a brief overview of the operation of the SRV-2 module.
The SRV-2 module has its own processor and memory which form a complete
microcomputer system. Together with the input/output facilities and the firmware
which is normally supplied, it is a complete two/three axis servo control system on a
single board. The module is designed for standalone use.
Each position encoder interface receives signals from an incremental encoder, 90
degrees out of phase (in quadrature). The phase of the two signals depends on the
direction of motion of the encoder. The interface converts the quadrature signals to up
and down count signals, which are counted by a counter circuit. The circuit multiplies
the encoder line count by four to get maximum position information from the encoder.
The encoder input circuits are fully isolated, and are designed for use with encoders
having complementary line driver outputs. The encoders require an external encoder
power supply. The module is intended for use with encoders providing signals A, B, Z,
and their complements; a total of six signals. The encoder input signals on channel 1
are buffered as the link encoder output, to allow separate units to share a common
encoder if required.
The local processor reads the up and down counts from the counters, and calculates the
current position of the encoder for each axis. It compares the current position with the
required position and calculates the position error. The position error is used to
calculate the demand signal for each motor, according to some control algorithm, for
example a PID 3-term control algorithm.
The calculated demand signal value for each channel is written to a 12-bit digital-toanalogue converter (DAC). The DAC output is scaled by an amplifier circuit to provide
a ±10V full scale output signal. This signal is output via a reed relay to the main drive
system for the motor.
The relays on the analogue outputs are controlled by three digital outputs. The relays
connect the drive system inputs either to the DAC outputs for normal operation, or to
0V to hold the motor stopped in an idle state. A second set of contacts from each relay
is brought out for external use, for example as a drive enable signal.
Other digital inputs and outputs are available and may be used for auxiliary inputs such
as limit switches or reference signals. These input and output lines are all optically
isolated, and are intended for use with 24V signals. They are suitable for direct
connection to programmable logic controller (PLC) systems. The digital outputs use
Darlington optical isolators, having a high current transfer ratio, and they can drive
loads up to a maximum of 100mA. Both inputs and outputs are protected against
reverse connection.
Copyright © 2004 Quin Systems Limited
Page 4
Issue 2
SRV-2 Issue F Hardware Manual
3.
Using The SRV-2 Module
3.1
General
The SRV-2 module is normally supplied with the Qmotion 2/3 firmware which
provides a high-level command set for controlling a servo system. This firmware
assigns certain functions to some of the SRV-2 input and output facilities, and these are
described below.
3.2
Incremental Encoder Inputs
The SRV-2 is normally supplied configured for use with incremental encoders. The
encoder input circuits are designed for use with encoders having complementary line
driver output signals. The encoder input signals are fully isolated, and the supply for the
encoders must be provided from an external power source. The input current into the
optical isolators is approximately 10mA. The module is shipped configured for use with
standard 5V encoder signals. The encoder input circuit is shown in the diagram below.
Note that the three red LEDs for each encoder light for the “off” polarity of the encoder
signals.
+5V
TLP115
1kΩ
Encoder
track A
Encoder A
100Ω
Encoder /A
0V
100Ω
1nF
100Ω
1nF
100Ω
Encoder 0V
Figure 1. Encoder input circuits.
The standard firmware assumes that encoder track A leads track B for positive
movement, although this is programmable.
Copyright © 2004 Quin Systems Limited
Page 5
Issue 2
3.3
SRV-2 Issue F Hardware Manual
Link Encoder Output
The link encoder output provides a buffered copy of the encoder input signals on
channel 1. This allows separate units to be connected together and share one encoder
without an external encoder splitter.
The encoder 0V supply common is available on the link encoder output connector, but
not the encoder +5V supply.
3.4
Absolute Encoders
On the SRV-2 module, provision has been made for using absolute encoders with a
synchronous serial interface (SSI). This option is selected by means of jumper links,
and replaces the normal incremental encoder feedback. The SSI input uses two twisted
pair RS-485 signals, one for the clock signal to the encoder (using the ‘A’ pair), and the
other for the serial data returned from the encoder (using the ‘B’ pair). The standard
firmware supports various different encoder resolutions, and either binary or gray code
data formats.
3.5
Analogue Outputs
The SRV-2 module has four analogue outputs. The output signals are 12bits resolution,
and range between ±10V. Three of these are used by the standard firmware as the speed
demand signals to the motor drive systems, and the fourth is available as a monitor
output signal. Outputs that are not used to drive motors may also be assigned as monitor
signals, which can be programmed for various functions. Each motor output signal is
taken through a reed relay which allows the output line to be switched directly to 0V.
This facility is used in the “motor off” state to force the output to 0V as a safe condition
when any error occurs.
3.6
Analogue Inputs
The SRV-2 module has three analogue inputs. The input signal range is ±10V, and the
analogue-to-digital converter has 12 bit resolution. The input signals are buffered by a
diferential amplifier, which provides good common mode noise rejection.
3.7
Relay Contacts
The relays are used to switch the main analogue outputs to 0V in the motor off state.
Each relay has a second set of changeover contacts, which change at the same time as
the main output is switched, and may provide an external indication of the motor off
state. This may be used to provide an inhibit signal to the motor drive system if
required.
The relay contact output connections are labelled in their unpowered (safe) state. This
is the same as in the motor off condition. The normally closed contacts are open when
the module is controlling the servo system, and closed when the module is in the motor
off state or is unpowered. The normally open contacts provide the opposite function.
Copyright © 2004 Quin Systems Limited
Page 6
Issue 2
3.8
SRV-2 Issue F Hardware Manual
Serial Ports
The SRV-2 module has two serial ports. Ports A and B are both used by the standalone
Qmotion 2/3 software; a SERVOnet slave uses port A only for initial configuration, and
port B for remote setup access for some types of drive. Each port is configured by the
software for either RS-232 or RS-485 signals as required, and multi-drop operation is
supported in RS-485 modes. The software control of port A may be overridden if
required for testing by changing the jumper link on J8.
3.9
CANbus Interface
There is an optional CANbus interface on the SRV-2 module. It uses the 9 way D type
socket at the bottom of the front panel, and the plug immediately above it, with all pins
linked pin-to-pin for looping the bus through. It is provided for both peer-to-peer
mapping between units and full master/slave operation with a separate host controller.
The CANbus interface requires an external 12 volt power supply to provide power to
the isolated transceiver device. It complies with the CAN in Automation (CiA) draft
standard DS102 Version 2.0, CAN Physical Layer for Industrial Applications.
Copyright © 2004 Quin Systems Limited
Page 7
Issue 2
3.10
SRV-2 Issue F Hardware Manual
Digital Inputs and Outputs
The SRV-2 module has sixteen digital input lines and eight digital output lines. These
may be individually set, cleared, or read via the standard firmware. They may also be
programmed for some predefined functions. Please refer to the appropriate Reference
Manual or User’s Guide for more details on programming the input and output lines.
The input lines are fully isolated, and must be used with an external logic supply,
normally +24V. The input current into the input optical isolators is approximately
10mA. The module is supplied configured for use with 24V signals, suitable for
signalling to a programmable logic controller. The input lines have a common 0V
connection, and are active-high.
The output lines are also fully isolated. Each output sources up to 100mA maximum.
The outputs have a common +24V connection, and are active-high. Protection diodes
are connected between each output and the +24V input/output supplies.
Typical circuits for the isolated digital input and output lines are shown below.
Machine SRV-2
Input circuit
SRV-2 +5V
SRV-2 Input 1
Input 1
SRV-2 0V
0Vio
Output circuit
SRV-2
Machine
SRV-2 +5V
SRV-2 Output 1
+24Vio
Output 1
0Vio
Figure 2. Isolated inputs and outputs
Copyright © 2004 Quin Systems Limited
Page 8
Issue 2
SRV-2 Issue F Hardware Manual
4.
Configuration
4.1
Processor Options : J1
Jumper J1 is provided for use with some processor test facilities. Fit a link 5–6, once
started, to stop the clock for JTAG test. No links should be fitted to J1 in normal
operation.
4.2
Reset and watchdog enable : J2
Jumper J2 provides a manual reset input, used during development, and enables the
hardware watchdog. Shorting J2 pins 1 and 2 resets the processor. If a link is fitted
between J2 pins 3 and 4 then the hardware watchdog is enabled. If no link is fitted then
the hardware watchdog is disabled. Currently the hardware watchdog is not available
and no links are fitted to J2.
4.3
Interrupt Configuration : J3
Jumper J3 is used to connect the various external interrupt sources to the seven local
processor interrupt inputs.
J3
/PFail : 1
/RefIRQ : 3
/RefIRQ : 5
/DuartIRQ : 7
/CanIRQ : 9
/CanIRQ : 11
/DuartIRQ : 13
/DuartIRQ : 15
/CanIRQ : 17
2 : /IRQ7
4 : /IRQ6
6 : /IRQ5
8 : /IRQ4
10 : /IRQ4
12 : /IRQ3
14 : /IRQ2
16 : /IRQ1
18 : /IRQ1
Figure 3. Interrupt Configuration : J3
The normal configuration is with the duart interrupt connected to /IRQ2 (link 13-14),
and the reference interrupt connected to /IRQ6 (link 4-3) when needed. The Mini
Machine Manager uses /IRQ4 ((link 9-10) for CANbus (SERVOnet); MiniPTS3
(Qmotion 3) uses /IRQ3 (link 11-12), while 2+1 (Qmotion 2) does not use CANbus.
Copyright © 2004 Quin Systems Limited
Page 9
Issue 2
4.4
SRV-2 Issue F Hardware Manual
SSI Clock Signals : J4
Jumper J4 connects the clock signals for the SSI absolute encoder option to the external
A and /A encoder connections on each channel. When an absolute SSI encoder is used
on a channel, two links are fitted to jumper J4 for that channel. Each channel may be
configured separately. The serial data output signals from each SSI encoder are then
received on the B and /B encoder input connections.
J4
SSICLK0 : 1
/SSICLK0 : 3
SSICLK1 : 5
/SSICLK1 : 7
SSICLK2 : 9
/SSICLK2 : 11
2 : ENC1A
4 : /ENC1A
6 : ENC2A
8 : /ENC2A
10 : ENC3A
12 : /ENC3A
Figure 4. SSI Clock Signals : J4
4.5
Eprom Device Select : J5
Jumper J5 selects the signals connected to pins 1 and 31 of the eprom or flash memory
devices IC9 and IC10. For 27C020 or similar eproms and 29F020 or similar flash roms,
link pins 1–3 and 2–4. For 27C040 eprom devices (512k×8) link pins 1–3 and 4–6. For
29F040 flash roms link pins 3–5 and 2–4.
J5
5V Pull-up : 1
IC9/10 pin 1 : 3
A18 : 5
2 : /WR
4 : IC9/10 pin 31
6 : A18
Figure 5. Eprom device select : J5
4.6
Ram Device Select : J6
Jumper J6 selects the signal connected to pin 30 of the SRAM memory devices IC12
and IC13. It allows pin 30 to be connected to either a high pull-up or address line A17
as required. For 128k×8 devices fit a link between pins 1 and 2. For 256k×8 or larger
devices (as for a Mini Machine Manager) fit a link between pins 2 and 3.
J6
5V Pull-up : 1
IC12/13 pin 30 :
A17 : 3
Figure 6. Ram device select : J6
Copyright © 2004 Quin Systems Limited
Page 10
Issue 2
4.7
SRV-2 Issue F Hardware Manual
Spare Duart Inputs : J7
Jumper J7 allows the unused inputs on the duart serial port device to be tied high or low.
The duart input pins are connected to a pull-up resistor network, and the jumper pad
allows them to be connected to 0V. Two of these lines are also connected to pins 3 and
7 of the serial eeprom devices IC6 and IC7, for configuration of device-dependent
options. J7 pins 1-2 or pins 3-4 may be linked to indicate NVM device types to some
software versions.
J7
Duart IP2 :
Duart IP3 :
NVM pin 3, Duart IP4 : 5
2 : 0V
4 : 0V
6 : 0V
NVM pin 7, Duart IP5 :
8 : 0V
Figure 7. Spare Duart Inputs : J7
4.8
Serial Port A Overide : J8
The serial ports on the SRV-2 module are configured by the software for RS-232 or
RS-485 as required, to reduce the number of jumpers that need to be configured by the
customer for different applications. Jumper J8 allows the software configuration for
port A to be overridden for testing. For normal operation under software control, link
J8 pins 1 and 2. To force RS-232 operation, link pins 2 and 3.
J8
Duart OP2 : 1
Port A select : 2
0V : 3
Figure 8. Serial Port A Override : J8
Copyright © 2004 Quin Systems Limited
Page 11
Issue 2
SRV-2 Issue F Hardware Manual
4.9
Jumper Locations
Top
S3
S2
S1
P2
J4
1
T1
T11
J2
1
J3
1
T4
1
S5
P4
P1
1
T5
1
J1
S4
J6
J8
1
1
J5
P3
J7
1
T6
1
T7
S6
T13
T2
T8
T9
T10
T3
Bottom
SRV-2 module - component side
Figure 9. Jumper locations
Copyright © 2004 Quin Systems Limited
Page 12
Issue 2
SRV-2 Issue F Hardware Manual
5.
Connections
5.1
Connector layout
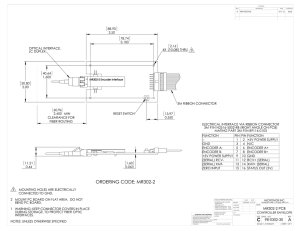
The SRV-2 board has several connectors. Two 9 way D sockets on the front panel are
used for serial ports. Port A is used for the main programming terminal, while port B is
used for options such as the Operator’s Panel or the Modbus interface. A 9 way D plug
and similar socket on the front panel are used for the CANbus interface. On the top plate
there are three 9 way D sockets for the three encoder inputs and a 9 way D plug which
provides a buffered output from the channel 1 encoder signals. Two part screw
terminals are used for all other signals, with the digital inputs and outputs at the back
of the unit on the left hand side, and the analogue inputs and outputs along the bottom
of the unit.
Encoder 3
Encoder 2
S3
S2
Encoder 1 Link encoder
S1
P2
T1
T11
Front
T4
Port B
S5
Back.
T5
Port A
S4
CANbus
P3
CANbus
S6
T6
T7
T13
T2
T8
T9
T10
T3
Figure 10. SRV-2 layout
Copyright © 2004 Quin Systems Limited
Page 13
Issue 2
5.2
SRV-2 Issue F Hardware Manual
Signal Names
On all signals, a ‘/’ prefix is used to denote an inverted or active low signal. For
example, the /VPA signal is the active low Valid Peripheral Address signal on the G64
bus.
5.3
Power Supplies
The +24V power supply to the SRV-2 module is connected via the 3 way screw
terminal connector T11 at the back of the unit. The +5V supply for the shaft encoders
is connected via T1, and the +24V i/o supply via T7. The relevant pins are as follows,
numbered from the top of each connector :
Unit supply :
+24V
0V
Earth
T11 pin 1
T11 pin 2
T11 pin 3
Encoder supply :
+5V
T1 pin 1
0V
T1 pin 2
Screen
T1 pin 3
I/O supply :
+24V
0V
T7 pin 1
T7 pin 2
Unit supply current is about 250 mA running, with an initial switch-on surge of up to 1
amp. Other supplies depend on connected devices: the unit internal loading of I/O
supply is 10 mA per ‘on’ channel.
5.4
Serial Ports
The following table shows the connections on the front panel 9 way D sockets for serial
ports A–B. Note that port C is no longer fitted.
Signal
Pin no.
Signal
Pin no.
RS-232
RS-485
1
High termination
6
2
TxD
7
RTS
/TxD
3
RxD
8
CTS
/RxD
4
Low termination
9
5
0V
Table 1: Serial port connections : ports A–B
Copyright © 2004 Quin Systems Limited
Page 14
Issue 2
5.5
SRV-2 Issue F Hardware Manual
CANbus Interface
The connections for the CANbus interface on the front panel 9 way plug are shown
below. Note that this complies with the CAN in Automation (CiA) draft standard
DS102 Version 2.0, CAN Physical Layer for Industrial Applications.
Pin no.
Signal
Pin no.
Signal
1
Reserved
6
GND
2
CAN_L
7
CAN_H
3
CAN_GND
8
Reserved
4
Reserved
9
CAN_V+
(7–13V)
5
CAN_SHLD
(screen)
Table 2: CANbus connections
Current consumption on the CAN_V+ (12 volt) rail is about 35 mA per node.
5.6
Encoder Connections
The table below shows the encoder connections for the Qmotion 2/3. Note that pin 4 on
the the channel 1 link encoder output plug does not have the encoder +5V supply
connected.
Pin no.
Signal
Pin no.
Signal
1
A
6
/A
2
B
7
/B
3
Z
8
/Z
4
+5VE
9
0VE
5
SCREEN
Table 3: Encoder connections
5.7
Background Debug Connector
The connections on the background debug connector P1 are given here.
Pin no.
Signal
Pin no.
Signal
1
/DS
2
/BERR
3
0V
4
/BKPT/DSCLK
5
0V
6
FREEZE
7
/RESET
8
IFETCH/DSI
9
+5V
10
IPIPE/DSO
Table 4: Background Debug Connector
Copyright © 2004 Quin Systems Limited
Page 15
Issue 2
5.8
SRV-2 Issue F Hardware Manual
Screw Terminal Connections
The back screw terminals provide connections for the power supplies and the digital
inputs and outputs.
Back screw terminals
Listed from top to bottom
Signal
1.1
+5V encoder supply
1.2
0V encoder supply
1.3
Screen/earth termination .
11.1
+24V supply
11.2
0V supply
11.3
Screen/earth termination .
4.1
0V i/o
4.2
Input 1:
4.3
Input 1:
4.4
Input 1:
4.5
Input 1:
4.6
Input 1:
4.7
Input 1:
4.8
Input 1:
4.9
Input 1:
4.10
+24V i/o .
5.1
0V i/o
5.2
Input 2:
5.3
Input 2:
5.4
Input 2:
5.5
Input 2:
5.6
Input 2:
5.7
Input 2:
5.8
Input 2:
5.9
Input 2:
5.10
+24V i/o .
6.1
0V i/o
6.2
Output 1:1
6.3
Output 1:2
6.4
Output 1:3
6.5
Output 1:4
6.6
Output 1:5
6.7
Output 1:6
6.8
Output 1:7
6.9
Output 1:8
6.10
+24V i/o .
7.1
+24V i/o .
7.2
0V i/o
Table 5: Back screw terminal connections
Copyright © 2004 Quin Systems Limited
Page 16
Issue 2
SRV-2 Issue F Hardware Manual
Note that the 24V power supply input is not isolated from the internal 5V supply, and
the 0V supply connection should normally be earthed. The 24V i/o supply is required
for correct operation of the motor enable relays, as it provides power to the relay coils.
The bottom screw terminals provide connections for the analogue inputs and outputs,
and the motor enable relays.
Bottom screw terminals
Listed from front to back
Signal
13.1
0V Operator’s Panel supply
13.2
+5V Operator’s Panel supply
2.1
Screen/earth termination
2.2
Analogue input 1–
2.3
Analogue input 1+
2.4
Analogue input 2–
2.5
Analogue input 2+
2.6
Analogue input 3–
2.7
Analogue input 3+
2.8
Analogue 0V
8.1
Analogue output 1
8.2
Analogue output 0V
8.3
Relay 1 n.o.
8.4
Relay 1 common
8.5
Relay 1 n.c.
9.1
Analogue output 2
9.2
Analogue output 0V
9.3
Relay 2 n.o.
9.4
Relay 2 common
9.5
Relay 2 n.c.
10.1
Analogue output 3
10.2
Analogue output 0V
10.3
Relay 3 n.o.
10.4
Relay 3 common
10.5
Relay 3 n.c.
3.1
Analogue output 4
3.2
Analogue output 0V
Table 6: Bottom screw terminal connections
All the screen connections are linked together to allow a single earth connection for all
the cable screens. They are not connected to the system internal 0V supply. A clean
separate earth connection is normally required to the 0V supply on terminal T11.2, or
to one of the analogue 0V points on T2.8, T8.2, T9.2, T10.2 or T3.2.
The supply connection for the Operator’s Panel on terminal block T13 is brought out
on pin 6 (0V) and pin 9 (+5V) of the 9 way D socket for serial port B. This allows a
single cable to be used to connect to the Operator’s Panel instead of a split cable with
wire tails to a separate external supply connection.
Copyright © 2004 Quin Systems Limited
Page 17
Issue 2
5.9
SRV-2 Issue F Hardware Manual
CPLD Download
The connector P4, behind the port B socket, connects to the programming chain for the
Lattice M4a CPLDs which implement much of the unit’s ‘hard’ logic. Pinouts are:
P4
+5 volts supply : 1
TDO : 2
TDI : 3
/ENABLE :
(no pin): 5
TMS : 6
0 volts: 7
TCK : 8
PLD download uses Lattice VM or PRO software with Lattice download pod, and a
‘chain’ command file to specify the JEDEC files and their order.
Some small amount of JTAG testing is possible from this connector, not using the
processor. This can verify some signal routes and displays, and read back the PLD
identity codes.
Prior to issue F the logic chips were programmed off the board and this connector did
not exist.
Copyright © 2004 Quin Systems Limited
Page 18
Issue 2
6.
SRV-2 Issue F Hardware Manual
SRV2 Flashboot Sector
The flashboot functions of the SRV2 perform a brief self-test before starting the PTS
code. Issue E/F also have features to enable firmware upgrade and for mode change
(SERVOnet or standalone) from the Toolkit 2000.
6.1
Switch-on Self-Test
The processor performs memory self-test following switch-on. The LED numeric
displays show testing status:
•
The restart reason (Reset Register value) is shown, prefixed r.
•
Test phases, steps 000, 001, and 002 are shown
•
Any address test error is indicated with letter A and the first failing bit number.
•
Any data test error is indicated with letter d and the first failing bit number.
•
On successful test completion the message rdy shows until the PTS code
indications appear.
In the event of test failure, the message hlt may show.
Normal start of the code then gives the serial-port ‘Copyright’ message and channel
checks; then data restore and channel status display.
6.2
Entry to Flashboot Diagnostics
The entry to flashboot code makes use of Toolkit 2000. From standard terminal,
Firmware Upgrade and choice of Version 2.x use the ZP command to switch the PTS
to the flashboot, at the same time as the terminal changes to 38400 baud. Or if there is
no live PTS, the terminal anyway selects 38400 baud. From there, user selection of
Unlock will await a PTS response to the UNLOCK string, then act as a terminal in the
faster flashboot mode. The flashboot Help prompt is given:
Flash Boot Version 2.2 05/19/00
> h
boot
Restart the processor
erase <start> <num> Erase <num> sectors from <start>
module [S or A]
Set module to Standalone or Axis
program
Program Flash memory
verify
Verify Flash memory
>
Commands can be shortened to an initial letter, so ‘b’ and return will restart, or ‘m a’
and return sets a unit to be an axis module.
Copyright © 2004 Quin Systems Limited
Page 19
Issue 2
6.2.1
SRV-2 Issue F Hardware Manual
Update Commands
This card has two byte-wide flash chips, to give a 16-bit memory bus access. For erase
program or verify the sector or base address is defined as a hexadecimal number of
64kbyte blocks per flash chip; but the numeric part of the file name extension defines
the start number of 64kbytes in total for a file download. Thus to erase from or write
starting at address $20000, the user would select sector 1 but a file with extension .b2
when prompted in response to the Erase or Program command.
As far as possible the user can upgrade a unit or change mode without needing any deep
understanding. The erase function is normally automatic before programming, and the
user is given a file already named, so need not know the details of sector numbering.
For a basic unit upgrade of version using Toolkit, the following steps are needed:
•
Select ‘Tools’, ‘PTS Firmware upgrade’, and choose Flashboot V2.x
•
If the terminal was not already live, select ‘Unlock’ and switch on when
prompted.
•
Select ‘Program’ and choose a file, then click ‘Download’. The toolkit issues
the necessary commands for erase and programming.
•
When complete, as indicated by the bar, ‘Close’ the download box.
To exit now back to PTS code:
•
Type ‘m’ and return to verify you have the correct mode.
•
Select ‘Restart’ to run the new PTS firmware just loaded.
6.2.2
Exit to PTS code
This uses the b command from the menu. ‘Restart’ on the Toolkit window toolbar will
give the b command and change the terminal baud rate back to 9600.
Copyright © 2004 Quin Systems Limited
Page 20
Issue 2
SRV-2 Issue F Hardware Manual
Index
A
absolute encoder input
analogue inputs
analogue outputs
auxiliary output
flashboot
force RS-232 on port A
6
6
6
6
I
15
12
J
B
background debug connector
board layout
C
CANbus
connections
configuration
connections
background debug
CANbus
encoder
power supplies
screw terminals
serial port
connectors
CPLD download
7
15
9
15
15
15
14
16
14
13
18
D
demand output
digital inputs and outputs
download
firmware
PLD
drive enable relay
6
8
20
18
6
6
15
5
6
5
6
10
F
firmware
firmware upgrade
upgrade
Copyright © 2004 Quin Systems Ltd
J1 : processor options
J2 : reset and watchdog
J3 : interrupt configuration
J4 : SSI clock signals
J5 : eprom device select
J6 : ram device select
J7 : duart inputs/serial eeprom options
J8 : serial port A override
jumper locations
8
8
9
9
9
9
10
10
10
11
11
12
L
line driver
link encoder output
5
6
M
E
encoder
absolute
connections
input circuit
link encoder output
sense
SSI
eprom device select : J5
input isolation
input lines
interrupt configuration : J3
19
11
5
monitor output
motor off relay
6
6
O
output isolation
output lines
output relay
8
8
6
P
power supply connections
processor options : J1
14
9
R
ram device select : J6
relay contacts
reset and watchdog : J2
RS-232
RS-485
10
6
9
7
7
20
Page 21
Issue 2
SRV-2 Issue F Hardware Manual
S
screw terminal connections
self-test
serial eeprom options : J7
serial port A override : J8
serial port connections
serial port
signal names
software
spare duart inputs : J7
SSI clock signals : J4
SSI encoder
Copyright © 2004 Quin Systems Ltd
16
19
11
11
14
7
14
5
11
10
6
Page 22