Summarizing Rushes Videos by Motion, Object and Event
advertisement
IEEE TRANSACTIONS ON MULTIMEDIA
1
Summarizing Rushes Videos by Motion, Object and Event Understanding
Feng Wang & Chong-Wah Ngo
Abstract— Rushes footages are considered as cheap gold mine
with the potential for reuse in broadcasting and filmmaking
industries. However, mining “gold” from unedited videos such
as rushes is challenging as the reusable segments are buried
in a large set of redundant information. In this paper, we
propose a unified framework for stock footage classification
and summarization to support video editors in navigating and
organizing rushes videos. Our approach is composed of two
steps. First, we employ motion features to filter the undesired
camera motion and locate the stock footage. A Hierarchical
Hidden Markov Model (HHMM) is proposed to model the
motion feature distribution and classify video segments into
different categories to decide their potential for reuse. Second,
we generate a short video summary to facilitate quick browsing
of the stock footages by including the objects and events that are
important for storytelling. For objects, we detect the presence
of persons and moving objects. For events, we extract a set
of features to detect and describe visual (motion activities and
scene changes) and audio events (speech clips). A representability
measure is then proposed to select the most representative video
clips for video summarization. Our experiments show that the
proposed HHMM significantly outperforms other methods based
on SVM, FSM and HMM. The automatically generated rushes
summaries are also demonstrated to be easy-to-understand,
containing little redundancy, and capable of including groundtruth objects and events with shorter durations and relatively
pleasant rhythm based on the TRECVID 2007, 2008 and our
subjective evaluations.
Keywords: Rushes video structuring, Video summarization,
Motion analysis, Object and event understanding.
I. I NTRODUCTION
In the broadcasting and filmmaking industries, rushes is a
term for raw footage (extra video, B-rolls footage), which is
used to generate the final products such as TV programs and
movies. Twenty to forty times as much materials may be shot
as actually becomes part of the finished product. Producers see
these large amount of raw footages as cheap gold mine. The
“gold” refers to stock footages which are the “generic” clips
with high potentials for reuse. However, cataloguing stock
footage is a tedious task, since rushes are unstructured, and the
stock footage is intertwined with lots of redundant materials.
In the past decades, research on video representation and
analysis has been mainly founded on edited videos, e.g., news,
sports and movies, which are highly structured. In contrast
to edited videos, rushes are characterized as unstructured and
redundant. During video capture, the same scene may be taken
Copyright (c) 2010 IEEE. Personal use of this material is permitted.
However, permission to use this material for any other purposes must be
obtained from the IEEE by sending a request to pubs-permissions@ieee.org.
F. Wang is with the Department of Computer Science and Technology, East
China Normal University, 500 Dongchuan Rd, Shanghai, 200241 China. Tel:
(86) 21-54345054. Email: fwang@cs.ecnu.edu.cn
C. W. Ngo is with the Department of Computer Science, City University of
Hong Kong, 83 Tat Chee Avenue, Kowloon Tong, Hong Kong. Tel: (852)27844390. Fax:(852)2788-8614. Email: cwngo@cs.cityu.edu.hk
for multiple times, e.g., when the actor forgets his lines. This
results in many repetitive shots in rushes. Different kinds of
behind-the-scenes footages are included, such as the clapboard, the director’s command, and the discussion between the
actors and the director. Rushes also contain some unintentional
camera motion, e.g., when the cameraman adjusts the camera
to focus on the actors before movie shooting.
Table I compares rushes video with another two video
domains: movie product and home video. Previous works
are mostly focused on the summarization of movie product,
where the main challenge is the selection of representative and
informative clips through content understanding. Home videos
introduces additional challenge for clip selection due to poor
visual quality because of amateur camera control. For example
in [17], spatiotemporal factors such as jerkiness, infidelity and
blurring are utilized to select high-quality shots. Rushes videos
share some properties with these two video domains. As a
preliminary version of movie product, rushes are captured by
professional cameramen and in high viusal quality. However,
similar to home videos, rushes are not edited and thus unintentional camera motion and redundant materials are included.
In general, existing works in movie product and home video
domains which have their respective assumptions on visual
quality and content redundancy cannot be directly applied for
rushes. Instead, there is a need to develop new techniques
for identifying a reduced set of useful footages from highquality but redundant and unusable materials. However, “gold
mining” in rushes is difficult as the semantic understanding of
video content remains a challenging problem. Furthermore,
stock footages and unusable materials are intertwined with
each other. Video structuring needs to be carried out together
with the stock footage classification.
TABLE I
C OMPARISON OF DIFFERENT VIDEO DOMAINS .
Vide domain
Home video
Movie product
Rushes video
Cameraman
Editing
Redundancy
Amateur
No or little
Much
Professional
Professional
No
Professional
No
Much
In TRECVID 2007 and 2008 BBC rushes summarization
tasks [24], [25], the participants are required to produce short
summaries for given rushes videos. The summaries should
contain as much useful footages as possible with enjoyable
rhythm, but least junk and redundant materials. Most systems
follow a two-step procedure. First, the irrelevant scenes and
retakes are detected and removed, where shot clustering are
widely employed. Second, the most important video clips are
then selected to compose a short summary by ranking the shot
importance based on different features such as face occurrence,
image saliency and motion intensity.
IEEE TRANSACTIONS ON MULTIMEDIA
Shot
detection
Stock footage
classification
2
Domain−specific scene
detection & removal
Rushes video
Summary
Fig. 1.
videos.
Representative
video clip selection
Object/Event
understanding
Framework for content classification and summarization of rushes
In this paper, we integrate two preliminary works in rushes
exploration [21] and summarization [38] into a unified framework to present our approaches in details and provide comprehensive evaluations and comparisons with the existing systems.
Figure 1 illustrates our framework to facilitate gold mining and
quick browsing of rushes materials. We mainly address the
following two problems. First, how to classify useful footages
for potential reuse? We focus on exploring the use of motion
features in locating stock footage. A Hierarchical Hidden
Markov Model (HHMM) is proposed to structure the rushes
video and classify each video segment into different categories
according to the semantics of camera motion. The segments
with intermediate camera motion are regarded as useless
and filtered. The purpose of stock footage localization is to
generate a clean version of the rushes videos with only useful
materials so that we can grasp the desired content during video
content analysis and summarization. Second, how to organize
the stock footage so that it can be efficiently browsed or
searched? Compared with edited videos, rushes videos contain
duplicate clips due to the multiple takes of the same shot. We
detect and remove these retakes before summary generation
so as to save unnecessary time on video content analysis.
An algorithm is then proposed to generate a short summary
for each rushes video by selecting the most representative
video clips based on the object and event understanding.
By watching the produced summaries, the video editors can
browse the video content quickly and decide their usefulness.
The remaining of this paper is organized as follows. Related works are discussed in Section II. Section III proposes
our HHMM for rushes video structuring and stock footage
classification. In Section IV, we present our approaches for
irrelevant materials filtering and repetitive stock removal using
domain-specific knowledge. A video summary is generated
in Section V by the proposed representability measure based
on object and event understanding. Section VI presents our
experiment results, and Section VII concludes this paper.
II. R ELATED W ORKS
Rushes summarization is to produce a simplified version of
the given video by reducing redundant information and the
content that can be easily predicted by watching just a portion
of the video. Video summarization is a challenging task due to
the requirement of making decisions automatically according
to the semantics of the given video. In the past several
decades, different kinds of approaches have been proposed.
A systematic review can be found in [35]. In [8], a set of
non-redundant keyframes are obtained by fuzzy clustering and
data pruning methods. Speech transcript is explored in [34] for
video program summarization. In [16], a user attention model
utilizing a set of audio-visual features is proposed. Object
detection is employed in [12] for video abstraction in surveillance system. In [43], a perception curve that corresponds to
human perception changes is constructed based on a number
of visual features, including motion, contrast, special scenes,
and statistical rhythm. The frames corresponding to the peak
points of the perception curve are extracted for summarization.
In [32], representative keyframes and metadata about video
structure and motion are generated to summarize the video
with the least information loss.
In contrast to the edited videos, rushes videos contain
another kind of redundant information, i.e., inter-shot redundancy. Some junk shots may be inserted during video
recording, and usually the same scene is taken for many
times. For rushes summarization, these redundancy needs
to be filtered and the useful materials should be located.
In the annual TRECVID workshop [46] since 2005, different approaches have been proposed for rushes exploitation,
including junk information filtering, retake detection, highlevel feature detection, video browsing and summarization.
In [33], a system is proposed to single out redundant and
repetitive rushes data. High-level features, such as faces and
buildings, are detected to help the editors select the useful
content. In [10], [39], [40], after video structuring, camera
motion classification and concept detection are performed for
content analysis. In [2], [3], different features including motion
activity, audio volume, face occurrence, color and object
similarity are extracted for shot clustering. The representative
items are then selected from each cluster to create tools for
video content visualization, browsing and summarization. In
[1], keywords are manually assigned to each shot. The shots
are united into stories manually. Metadata is used for fast
browsing. In [33], spatiotemporal slice is employed to quickly
detect the repetitive shots to remove the inter-shot redundancy.
In [36], the shots are clustered by SIFT features and one
keyframe is selected from each shot cluster based on a number
of rules, e.g., selecting the most dominant face, or selecting
the longest camera distance if no face exists. All these works
aim at selecting the potentially useful footages by employing
different features so as to faciliate more efficient browsing of
rushes videos.
III. S TOCK F OOTAGE C LASSIFICATION AND
L OCALIZATION BY M OTION F EATURES
The stock footage localization is to extract the materials
with high potential for reuse by the editors from the rushes
collections. Three semantic categories are considered: stock,
outtake and shaky. The concept stock represents the clips with
intentional camera motion which have the potential for reuse,
such as capturing an event with still camera and rotating
the camera for a panoramic view. In contrast, those clips
with intermediate camera motion, which are very likely to
be discarded in the final production, are denoted as outtake.
Examples include a quick zoom-in to get more details and
a pan to change to another perspective. The third category,
IEEE TRANSACTIONS ON MULTIMEDIA
3
root
stock
outtake
shaky
left
up
in
left
up
in
left
up
in
right
down
out
right
down
out
right
down
out
Fig. 2. An illustration of our two-level HHMM. Solid ellipses denote the
substates, while dotted ellipses denote the sub-HMMs of the HHMM structure.
(Notice that the substates in each sub-HMM are fully connected. For the
simplicity of presenting the figure, we do not show the edges.)
shaky, represents the shaky artifacts which could be discarded
from summarization.
Since rushes are raw footages without editing, the problem
of structuring and categorization are intertwined. It is infeasible to structure the videos without knowing the underlying
characteristics of frames. For example, structuring only by
motion cannot obtain satisfactory performance due to the indiscriminative motion features of the three semantic concepts.
In other words, there are two kinds of temporal structures
that are intertwined: the camera motion transitions inside each
category and the category transitions in the rushes videos.
Simultaneous modeling of both temporal structures is required.
Approaches such as [17] which measures the characteristics of
video segments independently could not be directly adopted
for not modeling the temporal relationship between segments.
In this section, we propose a Hierarchical Hidden Markov
Model (HHMM) for modeling the intertwined relationship
between structuring and categorization.
HHMM is the generalization of HMM with hierarchical
structure [42]. We use a two-level HHMM to encode the
three semantic categories. Figure 2 illustrates the structure of
our HHMM. On the top is an auxiliary root state. The first
level is a sub-HMM which has three substates to represent
stock, outtake and shaky respectively. Each substate is also a
sub-HMM which is further decomposed into several substates
in the lower level. Basically a substate in this level models
certain aspect of low-level features to support the encoding
of semantic concepts at the higher level. For each semantic
concept, we use six substates, left, right, up, down, in and out,
to model the six major movements respectively in horizontal,
vertical and depth directions. This hierarchical model, on one
hand, can alleviate the feature overlap problem by taking into
account the temporal constraint. On the other hand, the higherlevel substates make it possible to simultaneously structure and
categorize the rushes on the whole sequence.
A. Motion Feature Extraction
In order to facilitate structuring and categorization, a shot
should be partitioned into smaller segments which form an
observation sequence for HHMM. In this paper, we investigate
two kinds of settings: fixed and adaptive segments. The former
one is obtained through equal partitioning of a shot into
segments of fixed length, while adaptive segments are obtained
by dividing a shot into segments each with consistent motion.
Both types of segments have their strength and weakness.
The fixed segment is easy to obtain in practice, but with
inaccurate boundary and motion feature. Intuitively, adaptive
segment may have better performance due to good boundary
and motion feature. However, since shot segmentation by
motion itself is a research issue, false and missed detections
would introduce under- or over-segmentation that prohibit the
finding of underlying semantic labels.
To obtain the observation sequence for HHMM, we extract three types of dominant motion: pan/track, tilt/boom
and zoom/dolly from each segment. The inter-frame motion
features are firstly estimated from each two adjacent frames.
We apply Harris corner detector to extract the keypoints,
xt , from the frame t. Their corresponding points, xt+1 , in
the next frame t + 1, are estimated by the Singular Value
Decomposition (SVD) of the 3D tensor structure [26]. Since
the dominant features for rushes structuring and categorization
are pan/track, tilt/boom and zoom/dolly, 2D camera motion
model is sufficient for the representation of these three motion
features. Therefore, we use the 2D 6-parameter affine model
described as
·
¸
·
¸
a11 a12
v1
xt+1 =
xt +
,
a21 a22
v2
where [a11 , a12 , a21 , a22 , v1 , v2 ]T are estimated from the
matched points in the frame pair using the robust estimator LMedS [30]. The parameter v1 and v2 characterize the
pan/track and tilt/boom respectively, while the parameter a11
and a22 describe the zoom/dolly motion. We extract a 3dimensional motion feature vector f = [v1 , v2 , z = (a11 +
a22 )/2] for each two adjacent frames. A sequence of motion
vectors, {f }, is then obtained from the frame sequence in
a segment. We use the median o = median{f } as the
observation for a segment. Then a T -segment string of a
shot forms an observation sequence for HHMM, denoted as
O = (o1 , o2 · · · oT ).
B. HHMM Representation
A state in an HHMM consists of a string of substates from
top to bottom levels. We use k d = q1:d = q1 q2 · · · qd to denote
the substate string from top to level d, where the subscripts
denote the hierarchical levels. We drop the superscript d for
abbreviation when there is no confusion. Let D denote the
maximum number of levels and Q denote the maximum
size of any sub-HMM state spaces in HHMM. An HHMM
can then be specified by Θ = {A, B, Π, E}. Explicitly, A
d−1
D QS
S
denotes the transition probabilities (
{adk }), where adk
d=1 k=1
is the transition matrix at level d with configuration k d−1 .
B is the emission parameter which specifies the observation
distributions. We assume that the motion features comply with
D
Q
S
Gaussian distribution N (µ, Σ), then B = ( {µi , Σi }). Simi=1
ilarly, let πkd and edk denote the prior and exiting probabilities
d−1
d−1
D QS
D QS
S
S
d
at level d, then Π =
πk and E =
edk are the
d=1 kd =1
d=1 kd =1
prior and existing probabilities for HHMM model.
IEEE TRANSACTIONS ON MULTIMEDIA
L− R−L
−
I
4
−
D−L−U−R−L−R−D−O − R−L −
Outtake
O
−
Shaky
O
Stock
Fig. 3. An example of stock footage classification. The first row shows some snapshots of the video sequence. The second row lists the detected camera
motion along the sequence. L: Left; R: Right; U: Up; D: Down; I: In; O: Out. The third row illustrates the state transitions at the higher level of HHMM.
C. HHMM Training and Classification
Given an observation sequence O = (o1 , o2 · · · ot · · · oT ),
HHMM training is to find Θ∗ that maximizes the likelihood
L(Θ). This is estimated by the Expectation-Maximization
(EM) algorithm as in traditional HMM. Given an old parameter Θ and the missing data K = (k1 , k2 , · · · kt · · · kT ),
the expectation of the complete-data likelihood of an updated
parameter Θ̂ is written by
L(Θ̂, Θ)
=
=
∝
E(log p(O, K|Θ̂)|O, Θ)
X
p(K|O, Θ) log p(O, K|Θ̂)
K
X
p(O, K|Θ) log p(O, K|Θ̂)
TP
−1 P P
t=1 q 0 q 00
(1)
ξt (q 0 , qiq 00 , d − 1)
TP
−1 P P P
t=1 q 0 q 00 i
TP
−1 P P
(2)
ξt (q 0 , qiq 00 , d − 1)
P
t=1 q 0 k0 d0 <d
TP
−1 P
t=1 q 0
TP
−1 P P
âdq (i, j) =
µ̂k =
ot γt (k)
t=1
T
P
t=1
T
P
t=1
t=1 q 0 q 00
ξt (qiq 0 , k 0 , d0 )
γt
(3)
(qiq 0 )
ξt (qiq 0 , qjq 00 , d)
TP
−1 P P P
t=1 q 0 q 00 j
(4)
ξt (qiq 0 , qjq 00 , d)
The above three equations estimate the prior probability,
within-level transition probability and level-exiting probability
respectively by normalizing ξ and γ. The temporal dimension
of ξ and γ are marginalized out. Here we are only interested
in the transitions made at level d, and q 0 , q 00 are the states at
(5)
γt (k)
(ot − µk )(ot − µk )T γt (k)
T
P
t=1
The E-step estimates the expectation L(Θ̂, Θ), and the M-step
finds the value Θ̂ that maximizes the likelihood.
We define the probability of being in state k at time t and
in state k 0 at time t + 1 with transition at level d, given O and
def
= 0, ed+1:D
Θ, as ξt (k, k 0 , d) = p(kt = k, kt+1 = k 0 , e1:d
=
t
t
1|O, Θ). Similarly, we define the probability of being in state k
def
at time t, given O and Θ, as γt (k) = p(kt = k|O, Θ). In Estep, these two auxiliary variables are estimated by forward
and backward algorithm [42]. In M-step, we can get the
updated model parameter L̂ as follows,
êdq (i) =
T
P
Σ̂k =
K
π̂qd (i) =
levels lower than d. The means and covariances of state k at
the bottom level are then estimated by
(6)
γt (k)
With the estimated parameters, HHMM is then used to
classify each segment into the three semantic categories. Given
an observation sequence of a shot O = (o1 , o2 · · · ot · · · , oT ),
we apply Viterbi algorithm [42] to obtain the underlying
optimal state sequence, K ∗ = (k1∗ , k2∗ · · · , kt∗ , · · · , kT∗ ). Each
k ∗ actually has two variables to indicate the substates of
semantic label and motion feature in the two-level HHMM.
The final solution is found in the higher-level variable string
K 1∗ = (k11∗ , k21∗ · · · , kt1∗ , · · · , kT1∗ ), which forms the labels
of the semantic concepts for the segments. Meanwhile, the
variations in the variable string K 1∗ indicate the locations of
the semantic concept boundaries. Therefore, by using Viterbi
algorithm on the segment string, the simultaneous structuring
and categorization for a rushes shot can be efficiently achieved.
Figure 3 illustrates an example of stock footage localization.
In the given video sequence, the detected camera motion
composes the states in the bottom level of the HHMM (Figure 2) which models the motion pattern inside each semantic
category. With the two-level HHMM, we can simultaneously
structure and classify the sequence into different categories.
As shown in Figure 3, an outtake and a shaky are inserted
to adjust the camera setting before shooting the desired stock
footage. This pattern frequently happens in rushes videos and
is modelled by the high level of HHMM. Finally, the video
segments of the concept outtake and shaky are pruned, while
those of stock are retained for video summarization.
IV. D OMAIN -S PECIFIC S CENE C LASSIFICATION
In the remaining stocks after filtering the undesirable camera
motion, there are still two kinds of footages that are less
useful for editors, i.e., clapboard and retake scenes. The former
does not contain any information relevant to video content
and should be removed, while the latters are stocks repeatedly
taken and contain redundant information.
IEEE TRANSACTIONS ON MULTIMEDIA
5
B. Retake Detection and Removal
Fig. 4.
Detection of clapboard scenes. First row: keyframes from test
video set; Second row: example clapboard scenes extracted from training set
(Different colors are used for matching lines just to make the lines clearly
viewable in different images).
A. Clapboard Detection
In rushes videos, each stock usually contains not only the
movie play, but also some other materials that are irrelevant
to the storytelling, such as camera adjustment and scene
arrangement before movie shooting, and discussions between
the director and the actors. In video summarization, we detect
the clapboard scenes to partition a stock into subshots and
separate the story-relevant materials from other elements by
employing visual and audio features.
To detect the clapboard scenes, we employ the algorithm
for Near-Duplicate Keyframe (NDK) detection in [22], [44]. A
set of 50 example keyframes of the retake scenes are extracted
from the training video set as shown in Figure 4. The regions
of the boards are manually annotated. For the keyframes in
the given rushes video, we detect the keypoints and match
them with the example clapboard scenes. Figure 4 shows some
matching lines between keyframes and the matched example
boards. If enough matching lines are found in the annotated
regions, the keyframe is detected as a clapboard scene.
Besides visual features, the clapboard scenes can be detected
in speech transcripts. In most cases, the director controls the
progress of movie capture by calling out keywords such as
“standby”, “action”, “cut”, “take xx”, and “shot yy” (xx, yy are
the sequence number of the current take). We employ an ASR
(Automatic Speech Recognition) engine for speech recognition
and then detect these keywords in the output transcripts. The
movie play is located by a pair of keywords “action” and “cut”.
The third feature is audio. In some cases, although the
camera is faced to the actors, they might be discussing with
the directors instead of acting. These kinds of footages cannot
be detected by visual or speech cues. However, we observe
that in audio track there is quite obvious boundary between
movie play and unintentional materials, since the source of
audio, manner of speaking and background noise are different
in these two scenes. We classify the corresponding segments
into three classes: silence, actor’s lines, and noise. A number
of features are extracted from audio track, including cepstralflux, multi-channel cochlear decomposition, cepstral vector,
low energy fraction, volume standard deviation, non-silence
ratio, standard deviations of pitch and zero crossing rate,
and smooth pitch ratio. An SVM is then employed for the
classification of different audio scenes.
During video capture, due to the mistakes of the actors and
in order to achieve better effects, each stock is usually taken for
many times. This results in many repetitive stocks. We detect
all the retakes and select only one for summary generation. Retake detection is carried out by matching subshots in different
stocks. The similarity of two subshots are calculated based on
keyframe and ASR speech transcript comparison. Given two
subshots si and sj , two different cases are considered: i) si
and sj are repetitions of each other; ii) si is a part of sj .
For the second case, si is an incomplete version of sj and is
removed from the subshot list. For the first case, all subshots
are complete. They are different takes of the same scene until
the director gets an satisfactory one. In this case, we choose the
last version and remove all the other repetitions by assuming
that the capture of the same scene is stopped until the director
gets a desired version.
V. V IDEO S UMMARIZATION BY O BJECT AND E VENT
U NDERSTANDING
After removing the less useful information in the rushes
video, in this section, a short video summary is generated to
help the users quickly browse the video content. The summary
is expected to include as much information as possible in
limited duration with pleasant rhythm. Unlike most previous
approaches by shot clustering based on low-level color, texture
and audio features, we carry out summarization by exploring
more semantic information, i.e., objects and events, to have
better understanding of the video content.
A. Object and Event Understanding
For video summarization, the first step is to understand the
video content. Since video is used to present objects and describe events, video content analysis, in nature, is about object
and event detection. For objects, we mainly detect the presence
of persons and moving objects, which are essential for content
analysis of rushes videos. An event can be described from the
following five aspects: Who, What, Where, When and How.
In our approach, we attempt to detect event occurrences by
extracting related features to locate these five elements. To
answer the question of “What happen in the video” needs event
recognition, which remains a challenging problem in general
video domains. Fortunately, for video summarization, the task
is to detect the presence of events so as to include them in the
summary, while the recognition is usually unnecessary. Event
detection can be carried out in both video and audio tracks,
and most events are visually presented by the object activities,
camera motion and scene changes.
Object detection actually answers the question of “Who
participate in the event”. We consider two kinds of objects
in video sequence. First, human plays an important role in
different kinds of videos, especially in the rushes collections
of movie products. We detect human faces by employing
the face detector from CMU [45]. Second, an object in
movement usually implies an event occurrence. To capture
the objects in videos, we detect and track moving objects
based on our previous work [27]. Some examples of face
IEEE TRANSACTIONS ON MULTIMEDIA
Fig. 5.
Object and face detection.
Fig. 6.
Keypoint tracking in sampled frames.
and object detection are shown in Figure 4. Each object is
represented as o(oid , ts , te , po (t)), where oid is the identity of
the object, ts and te denote the time when the object appears
and vanishes before the camera (When), and po (t) includes a
list of locations of the object at time t (ts ≤ t ≤ te ) (Where
and How).
The scene actually answers the question of Where. A new
scene indicates the beginning or a new stage of an event. To
detect the scene changes in events, we employ the algorithm in
[44], [22] to track the keypoints in sampled frames. Basically
we evenly select 3 frames every second. For each sampled
frame, keypoints are detected and matched with the subsequent
5 frames by employing the algorithm in [44], [22]. An example
of keypoint tracking is shown in Figure 6. Based on the
results of object detection, a matching keypoint in two frames
is assigned to an object if it lies on the object tracked in
both frames. Otherwise, it is assigned to the background
scene. The number of matching keypoints in the neighboring
keyframes measures the consistency of the scenes. A scene
change is detected if the number of matching lines between
two keyframes is less than a threshold.
Camera motion is another indicator of event evolution.
Different kinds of camera motion imply the intentions of the
cameraman or director. For instance, a camera pan includes
new objects and background scenes, while a zoom-in emphasizes some objects or people. In Section III-A, we have
detected three types of dominant camera motion: pan/track,
tilt/boom and zoom/dolly from each subshot. This helps us to
capture the intentions of the movie makers and thus include
the desired materials.
Besides visual events, we consider people’s speech and
dialogue based on speech recognition in audio track. Audio
is useful for video summarization since there is usually little
visual changes during a long dialogue or speech. Such events
are important for the semantic completeness of the summary,
but cannot be captured by visual detectors. In Section IV-A,
we have employed an ASR engine to extract human’s speech
inside each stock. After stop words removal, we get a set of
words. An audio event is detected if the density of meaningful
words is high enough in a video clip.
6
By audio-visual event understanding, we get the following
features:
a) A set of objects O = {oi }. Each object is associated
with its existence period and location information;
b) A set of object motion activities Φ = {φj }. Each
element is associated with an object and its movements
along the video sequence;
c) A list of camera motion Γ = {γk }. Each element is
associated with the camera motion parameters and time
information.
d) The scene changes ∆ = {δl } between neighboring
frames with the period of each scene being recorded.
e) Dialogue or speech clips Ω = {ωm }. Each clip is
associated with the speech transcripts, and the beginning
and ending time of each dialogue.
Although the above features cannot tell what exactly happen
in the video, they are good indicators for the object and event
occurrences. Furthermore, they also enable us to extract the elements of Who, When, Where, and How to describe the events.
This is sufficient for video exploitation and summarization.
B. Representability Score
Video summary is to select the most representative video
clips to explicitly describe video content. For this purpose, we
propose a representability score for the candidate video clips
based on object and event understanding. First, a given subshot
is segmented into 1-second video clips. Each clip overlaps
with the previous one by 300ms to enable the flexibility of clip
segmentation and selection. These clips are used as candidates
for composing video summaries.
Given a video clip v, five scores are defined to measure the
representability of v for the five feature sets {O, Φ, Γ, ∆, Ω}
respectively as follows:
X Z t2
|t − (tso + teo )/2|
Rv (O) =
(1 −
)dt (7)
teo − tso
o∈O t1
R t2
P
φ∈Φ t1 f (t)dt
Rv (Φ) = P
(8)
R teφ
φ∈Φ tsφ f (t)dt
X Z t2
|t − (tsγ + teγ )/2|
Rv (Γ) =
(1 −
)dt (9)
teγ − tsγ
γ∈Γ t1
R t2
P
δ∈∆ t1 δ(t)dt
Rv (∆) = P
(10)
R teδ
δ∈∆ tsδ δ(t)dt
T
kW (v) W (Ω)k
Rv (Ω) =
(11)
kW (Ω)k
where (t1 , t2 ) denotes the temporal intersection of clip v
and the corresponding object or event, (tso , teo ) denotes the
existence period of object or event o, f (t) is the motion
intensity function at time t, and W (v) is the set of words
in speech transcript for a given video clip v. Equations 7 and
9 measure to what extent the clip v can include the presence
of each object o ∈ O and camera motion γ ∈ Γ respectively.
We assign larger weights to the video clips when the object or
camera motion starts or ends (farther away from the midpoint
of [tso , teo ]) as we think this is more important events, while
IEEE TRANSACTIONS ON MULTIMEDIA
the progress of the object movement or camera motion can
be easily predicted if the starting and ending clips have been
included in the summary. In Equation 8, the representability
of clip v for an activity event φ is measured by the amount of
motion included by v. Equations 10 and 11 measure how many
scene changes and words in speech transcripts are included by
video clip v respectively.
Based on object and event understanding, we can identify
the content inclusion of each video clip vi as Inc(vi ) =<
Ovi , Φvi , Γvi , ∆vi , Ωvi >, where Ovi ⊆ O,Φvi ⊆ Φ, Γvi ⊆ Γ,
∆vi ⊆ ∆,Ωvi ⊆ Ω are the sets of objects, motion activities,
camera motion, scene changes, and speech clips respectively
that lie in vi . By equations 7-11, a representability score of a
video clip vi for vj is defined as
7
Video clip
representability
s1
s2
c1
c
c2
Video sequence
separated into clips
Fig. 7. Representability scores of two video clips c1 and c2 . Given another
video clip c, the values of s1 = Rep(c1 , c) and s2 = Rep(c2 , c) indicate
how much information in c can be represented by c1 and c2 respectively.
improve the overall representability. For each video clip cr
1
that is not selected, we attempt two operations: inserting cr
· (wO Rvi (Ovj ) + wΦ Rvi (Φvj )
d(vi , vj )
to Sum or using cr to replace one of its neighboring clip in
+wΓ Rvi (Γvj ) + w∆ Rvi (∆vj ) + wΩ Rvi (Ωvj )) (12) Sum. The clips that can improve the representability the most
are inserted or used to replace another one. This procedure
where d(vi , vj ) is the temporal distance between the midpoints
continues until the summary length reaches the upper limit L
of vi and vj , wO = wΦ = wΓ = w∆ = wΩ = 0.2 are
(e.g., 2% of the original video duration in TRECVID 2008) or
the weights for the five different features respectively. The
the incremental representability score ∆s gained by inserting
score Rep(vi , vj ) measures to what extent vi can represent
1
one clip is less than a minimum value M INs = 3L
. Finally,
the content in vj . For instance, if Rep(vi , vj ) is high enough,
all video clips in Sum are adjoined together to compose a
i.e., most objects and events in vj are also found in vi , it is
video summary.
better to keep the more representative clip vi in the summary
The novelty of our algorithm comes from the employment
and remove vj to reduce the summary length and redundancy.
of object and event understanding for selecting semantically
Based on Equation 12, for each video clip, we measure
meaningful clips. This is in contrast to existing works such
its representability for the neighboring clips. Figure 7 shows
as [7], [19] which sample clips based on activity or visual
the representability curves of two video clips c1 and c2 . The
intensities through low- or mid-level feature analysis. In adoverall representability score of a video clip c is calculated as
dition, the proposed representability measures the importance
X
0
s(c) =
Rep(c, c )
(13) of a clip by judging from its contribution to the video content.
This is also different from conventional strategies where the
c0
selection criteria are rule-based or depending on pairwise shot
where c0 is the neighboring clip of c. In Figure 7, s(c1 )
similarity.
and s(c2 ) correspond to the area below the two curves. The
larger the representatability score is, the better the video clip
VI. E XPERIMENTS
can represent the neighboring ones. We just consider the
We conduct experiments on the video data from TRECVID
representability of a clip for its 150 neighbors in order to
2007
and 2008 BBC rushes summarization task [24], [25]
smooth the storytelling of the summary. For instance, if one
to
demonstrate
the performance of both stock footage clasperson appears again after a long time, the second clip should
sification
and
rushes
summarization. The video data consists
not be simply removed because this might correspond to a
of
raw
video
footages
mainly for five series of BBC drama
new event.
programs. The TRECVID 2007 dataset includes 43 videos
(about 18 hours) for development and 42 videos (17 hours) for
C. Summary Generation
testing. The video duration ranges from 3.3 to 36.4 minutes. In
Based on the calculated representability score, we select a TRECVID 2008, another 39 videos (17.2 hours) are provided
set of video clips Sum that include all detected features and as testing data. For experiments, the videos are first partitioned
have the highest ratio of representability and total duration. into shots by employing our work in [20].
Our algorithm works as follows.
1) Initialize Sum = {}, and C is the set of all video clips A. Stock Footage Classification
in the descending order of their representability scores.
We compare the proposed HHMM with our previous
2) Select the clip ci ∈ C
with
the
highest
representability
work
presented in TRECVID 2005 [23]. In [23], we experS
score. Sum = Sum {ci }.
iment three approaches: Finite State Machine (FSM), Hidden
3) Remove all clips cp ∈ C if Rep(ci , cp ) is larger than a Markov Model (HMM) and Support Vector Machine (SVM).
threshold.
In this paper, we use TRECVID 2007 BBC development
4) Goto 2 if C is not empty.
dataset for training, and TRECVID 2008 testing set for evalWith the above algorithm, we exclude the duplicate clips uation. In the groundtruth data, 63.5%, 15.9% and 20.6% of
that can be represented by others. Next, we update Sum to the shots are belong to stock, outtake and shaky respectively.
Rep(vi , vj ) = p
4
IEEE TRANSACTIONS ON MULTIMEDIA
8
Table II summaries and compares the properties of different
approaches. FSM is actually a simplified HMM that the fuzzy
transitions in HMM become deterministic. SVM, instead of
modelling feature distribution, discriminates the three semantic
concepts by hyper-plane in feature space. We use Radial Basis
Function (RBF) as the kernel for SVM. Meanwhile, Gaussian
distribution is used as kernel function in HMM and HHMM.
Adaptive video segmentation is applied for FSM, while fixed
segments of 1-second duration are used for SVM and HMM.
HHMM is tested with both adaptive (A-HHMM) and fixed
video segments (F-HHMM).
TABLE II
C OMPARISON OF DIFFERENT METHOD ’ S PROPERTIES .
FSM
SVM
HMM
F-HHMM
A-HHMM
Segment length
# Structure
# Feature
Kernel
adaptive
fixed
fixed
fixed
adaptive
flattened
flattened
flattened
hierarchical
hierarchical
3
9
9
3
3
threshold
RBF
Gaussian
Gaussian
Gaussian
TABLE III
B. TRECVID BBC Rushes Summarization
Given a video from the rushes test collection, the task is
to automatically create an MPEG-1 summary clip less than or
equal to a maximum duration that shows the main objects and
events in the rushes video to be summarized. The summary
should minimize the number of frames used and present the information in ways that maximize the usability of the summary
and speed of recognizing objects and events in videos. In the
experiments, based on domain specific knowledge presented
in Section IV, the performance of clapboard detection is:
Recall = 95% and P recision = 78%. Most retakes can be
removed with an accuracy of 94%.
1) TRECVID 2007 Evaluation: In TRECVID 2007, there
are 1008 summaries (including 84 summaries of two baseline
runs generated by CMU [9]) of 42 videos submitted from
22 teams for judgment [24]. The summaries’ lengths are
limited to be less than 4% of the original videos. During
evaluation, five assessors are asked to watch and score the
submitted summaries. Seven criterions are used for the subject
evaluation: EA, RE, IN, DU, XD, TT, and VT (the detailed
definitions of these criterions can be found in Table IV). The
performance is judged based on the guidelines and evaluation
provided by TRECVID 2007 BBC rushes summarization task
[24].
SEMANTIC CATEGORIZATION ACCURACY ON THE TESTING VIDEO SET.
Approaches
Stock
Recall
Prec.
Outtake
Recall
Prec.
Shaky
Recall
Prec.
FSM
SVM
HMM
F-HHMM
A-HHMM
0.764
0.795
0.870
0.959
0.977
0.794
0.721
0.383
0.612
0.537
0.075
0.621
0.348
0.413
0.731
0.986
0.982
0.976
0.983
0.988
0.120
0.175
0.148
0.591
0.633
0.116
0.334
0.412
0.589
0.695
Table III shows the results of rushes footage classification for testing videos. The results are evaluated based on
the number of frames being correctly or wrongly classified.
From Table III, we can see that HHMM outperforms the
other approaches. Overall, we have about 96% accuracy on
stock, 60% on outtake and 70% on shaky in the testing set.
Compared with the other two categories, stock footages are
usually captured with perfect and consistent camera control.
The motion pattern in stock is relatively simpler and easier to
model with HHMM. Thus, stock is more separable from shaky
and outtake. The classification errors mainly happen between
shaky and outtake due to the complicated and varying camera
motion in these two categories. This does not hurt much the
performance of the whole system since both concepts are
finally discarded. Since SVM assumes that the observations
are independent and neglects the temporal relationship, the
classification accuracy is pretty low. Instead, by exploiting
the temporal relationship, HMM presents some improvement
compared to SVM. Through experiments, hierarchical HMM
shows better performance than flat HMM. A-HHMM shows
slight improvement in stock classification compared to FHHMM, and significant improvement in the classification of
shaky segments.
TABLE IV
O UR RESULTS ON TRECVID 2007 RUSHES SUMMARIZATION TASK . (T HE
NUMBERS ARE THE MEDIANS OF THE SCORES FOR ALL 42 VIDEOS .)
EA - Easy to understand: 1 strongly disagree - 5 strongly agree;
RE - Little duplicate video: 1 strongly disagree - 5 strong agree;
IN - Fraction of inclusions found in the summary (0 - 1);
DU - Duration of the summary (sec);
XD - Difference between target and actual summary size (sec);
TT - Total time spent judging the inclusions (sec);
VT - Video play time (vs. pause) to judge the inclusions (sec).
Criterion
EA
DU
Baseline 1
0.60 3.33 3.33
IN
RE
66.4
-2.28 110.67 66.67
Baseline 2
0.62 3.67 3.67
64.6
-0.89 109.17 63.83
Median. of 22 teams 0.47 3.67 3.33 59.33
Our result
Our Ranking
XD
TT
VT
5.23
93.17
59.09
0.65 4.00 3.50 42.15 15.03
87.83
45.33
8
5
3
1
3
5
6
Table IV shows the evaluation results of TRECVID 2007
rushes summarization task. The two baselines are generated by
CMU [9]. The first one evenly selects 1-second video clip for
every 25 seconds. The second one performs shot clustering and
selects one shot from each cluster. The detailed results of all
teams can be found in [24]. As can be seen in Table IV, for the
first three criterions: IN, EA, and RE that measure the usability
of the summaries, we are ranked 3, 1, and 3 respectively.
Considering the contradictions among these criterions (e.g.,
higher IN usually introduce more redundancy and lower RE),
our results are quite encouraging. Meanwhile, our summary
duration (DU) and watching time (VT) are ranked 5 from 24
runs. As concluded in the evaluation report [24], only our
system is significantly better than the baselines in terms of
IEEE TRANSACTIONS ON MULTIMEDIA
EA (easy to understand), IN (inclusion of objects and events),
and RE (little redundancy).
The major approaches adopted by other teams include
shot clustering [9], [5], [37], video acceleration [7], [9], and
highlight keyframe detection [4]. Shot clustering focuses on
detecting and removing redundant shots based on different
features such as SIFT [37] and color [9]. The problem of
this kind of approaches lies in two aspects. First, without
considering semantic information, only the visually similar
shots are pruned. For instance, given a list of continuous
shots describing a single event, the users can predict what
happens by watching only one or few shots. However, based
on shot clustering, these shots may not be similar to each
other according to low-level features and thus more shots are
unnecessarily included in the summary than actually needed.
Second, two shots that are visually similar may appear in
different events. Simply removing any one of them based on
shot clustering will lead to incomplete event description. In our
approach, the redundancy level is measured not only visually,
but also semantically by object and event understanding. Thus,
the generated summary can preserve the storyline of the video
while keeping elegant. According to the experiments of [9],
simply speeding up the video achieves relatively high IN,
since human is able to capture most objects and events even
when the video is played at rather high speed, e.g., 25 times
of the original one. But this approach inevitably includes
much redundant and junk materials. In [4], highlight shots are
extracted by combining keyframe extraction, face detection
and motion estimation. This approach attempts to include the
information that is potentially important for users. However,
the redundancy problem is not addressed.
2) TRECVID 2008 Evaluation: In the most recent rushes
summarization task organized by TRECVID 2008, 43 runs
from 32 teams are submitted for evaluation. The summaries’
lengths are further limited to 2% of the original videos. The
evaluation process is the same as in TRECVID 2007. Among
the eight criterions used this year, five (DU, XD, TT, VT, IN)
are adopted from TRECVID 2007. In addition, JU and RE
are used to measure the degree of junk materials and duplicate
video clips in the summaries respectively. Another criterion TE
is defined and replaces EA in 2007 to evaluate the enjoyability
of the summaries. Table V shows and compares the detailed
scores of our approach (VIREO.1) with some other systems.
As can be observed in Table V, it is not easy to select a
single metric from the eight given criterions to evaluate the
summaries. An ideal summary should include most necessary
materials with the least junk and redundant information while
making the storytelling smooth and enjoyable in as short
time as possible. However, there are always contradictions
between these criterions. For instance, a large IN usually
introduces more junk and redundant materials, and results in
a longer summary. On the other hand, the rhythm of a short
summary with a lot of materials is usually unpleasant. To have
a more comprehensive comparison among different systems,
in Table V, four metrics are derived by combining different
criterions to evaluate the summaries from different aspects.
The first metric S1 = IN ∗ JU ∗ RE ∗ T E/DU combines
the different criterions to calculate an overall score for each
9
system. For this metric, our submission (VIREO.1) is ranked
3 among all 43 runs. Only QUT GP and thu intel get higher
scores than us. By checking the raw scores, our summaries
include 50% more useful footages (IN) than both of them.
To evaluate the performance of stock footage localization,
we define S2 = IN ∗ JU ∗ RE. A higher value of S2
means that the system can pick up more useful materials
while including least junk and redundant information. We are
ranked 1 for this metric. Compared with other systems, we
are ranked 4 for IN. At the same time, our summaries include
the least junk materials (ranked 1 for JU). This demonstrates
the effectiveness of our approach described in Section III
for stock footage classification. For RE, our system scores
around the average level among all runs. As presented in
Section V, we just consider the representability of each clip
for its near neighbors so as to smooth the storytelling. Some
similar objects and scenes are inevitably included in a long
video sequence. This is probably the price we pay for keeping
a smooth storyline in the summary. Some other runs (such as
JRS, COST292 and REGIM) are good at removing junk and
redundant materials, but also exclude more useful footages at
the same time.
Two metrics S3 = 10 ∗ IN ∗ T E/DU and S4 = 10 ∗ IN ∗
T E/T T are defined to measure the usability of the summary.
For the users, a good summary should be able to tell the story
completely with enjoyable rhythm in limited duration (S3 ) or
watching time (S4 ). As shown in Table V, we are ranked 1 for
both metrics. Our summary length is shorter than most other
runs. Meanwhile, we include more useful materials and keep
a relatively good rhythm of the summary. This helps the users
to judge the usefulness of the rushes videos efficiently and
enjoyably. For IN, only the runs from CMU and asahikasei
get higher scores than ours. However, all these runs suffer
from significantly lower TE which reduces the usabilities of
the summaries. Our performances on these two metrics are
mainly due to the proposed approach for video summarization
in Section V. With the extracted visual and audio features, we
detect the object/event occurrences and understand the video
content in a more semantic way. This enables us to select the
most representative clips for an elegant, complete, and pleasant
summary of the video content.
3) Discussions: Since the scales of different criterions are
not exactly the same, the above defined metrics might not
be perfect. However, as listed in Table V, by these four
metrics, we can find some systems with good performance for
different aspects. The team QUT GP [31] attempts to make
summaries as enjoyable as possible. Based on shot clustering,
the longest shot is selected. The number of faces, the amount
of motion and the size of the cluster are used to rank and
select shots for summary generation. In the submission from
thu-intel [41], color, edge, face detection, motion intensity
and audio information are used to select the most representative clips by hierarchical clustering. In PolyU’s system [14],
unsupervised clustering is also employed for keyframe and
clip selection based on local color histogram feature. PicSOM
[13] selects video clips by initially favoring the frames near
the center of each shot using linear weighting. The scores
of clips containing faces, speech, objects or camera motion
IEEE TRANSACTIONS ON MULTIMEDIA
10
TABLE V
O UR RESULTS (VIREO.1) ON TRECVID 2008 RUSHES SUMMARIZATION TASK . T HE SYSTEMS ARE RANKED AMONG 43 SUBMITTED RUNS . JU: DEGREE
OF JUNK FRAMES IN THE SUMMARY (1-5), 5 MEANS LEAST JUNK MATERIALS IN SUMMARIES ; RE: DEGREE OF DUPLICATE VIDEOS (1-5), 5 MEANS THE
LEAST REDUNDANCY IN SUMMARIES ; TE: DEGREE OF PLEASANT RHYTHM (1-5), 5 FOR THE BEST. S1 = IN ∗ JU ∗ RE ∗ T E/DU ;
S2 = IN ∗ JU ∗ RE; S3 = 10 ∗ IN ∗ T E/DU ; S4 = 10 ∗ IN ∗ T E/T T .
System
QUT GP.1
thu-intel.2
VIREO.1
PolyU.1
COST292.1
PicSOM.1
thu-intel.1
JRS.1
asahikasei.1
REGIM.1
BU FHG.1
CMU.2
CMU.1
cmubase3.1
DU
XD
21.5
19.6
23.6
26.0
22.8
22.1
28.1
18.5
19.5
28.0
22.9
33.9
33.9
33.9
7.17
12.32
7.63
3.07
8.44
4.05
4.09
13.38
9.64
2.65
7.94
0.40
0.40
0.40
TRECVID 2008 Criterions
TT
VT
IN
JU
RE
TE
S1
rank1
S2
32.67
31.67
38.00
36.00
31.00
32.33
39.00
25.33
34.67
36.67
38.67
56.67
53.33
58.67
3.67
3.67
3.00
3.67
4.00
3.33
3.67
4.00
3.00
3.67
3.00
2.00
2.00
2.00
3.33
3.00
2.67
3.33
3.33
3.00
3.00
3.33
1.67
3.33
2.00
1.67
1.67
1.33
0.918
0.866
0.835
0.811
0.665
0.662
0.604
0.581
0.532
0.497
0.456
0.239
0.236
0.152
1
2
3
4
5
6
7
8
11
14
19
39
40
42
5.926
5.657
7.377
6.330
4.551
4.879
5.657
3.230
6.210
4.175
5.220
4.860
4.800
3.868
24.33
21.67
25.00
27.00
24.67
25.00
28.67
20.00
20.00
30.67
24.67
35.67
33.00
34.67
0.44
0.42
0.67
0.47
0.31
0.44
0.42
0.22
0.69
0.31
0.58
0.81
0.80
0.83
3.67
3.67
3.67
3.67
3.67
3.33
3.67
3.67
3.00
3.67
3.00
3.00
3.00
2.33
are then increased using heuristic weights. In COST292’
system [18], face detection, camera motion and MPEG-7
color layout descriptors for each frame are used as input to
their clustering approach for summarization. The system puts
emphasis on the enjoyability of the summary by following the
storyline and some editing rules, for instance, it never displays
segments shorter than 2 seconds. In asahikasei’s submission
[11], duplicate scenes are removed based on average color
of scenes. Each scene is skimmed to keep motion of video
constant. In Joanneum’s submission [3], visual activity and
face detection are employed to select the important clips based
on defined rules. In [28], [29], BU FHG models rushes videos
as a hierarchical structure and employs k-NN clustering for
redundancy removal. The most representative shot is selected
from each cluster according to its length and sum of activity
level for summarization. This system is implemented in the
compressed domain and quite efficient. Since no semantic
information is considered, low TE scores are achieved. CMU
contributes three runs [6]. A baseline is first generated by
fast forwarding the play of original videos by 50 times. The
irrelevant clips are then detected and removed. Audio is added
to the summary to improve the comprehensiveness. Fastforwarding is good at covering most footages. However, as
can be found in Table V for the CMU runs, the summaries
are still filled with many repetitive shots and the enjoyability
is inevitably unsatisfactory.
Overall, in TRECVID 2008 BBC rushes summarization
task, shot clustering is widely employed to detect and remove
redundant materials. Some low- or mid-level features such as
shot length [31], motion intensity [29], [11], spatial image
salience [15], and human face occurrence [3], [41], [18],
[31] are used to heuristically rank the shot importance. These
methods intend to highlight some content such as face and
motion, and produce summaries that are good from aspects
such as content inclusion, system efficiency and enjoyability.
Derived Metrics
rank2
S3
rank3
5
8
1
2
23
15
7
38
3
27
10
16
18
31
0.681
0.643
0.758
0.602
0.453
0.597
0.448
0.396
0.591
0.369
0.507
0.399
0.394
0.326
2
3
1
4
15
5
16
23
6
27
7
22
24
39
S4
rank4
0.448
0.398
0.471
0.435
0.333
0.408
0.323
0.289
0.332
0.282
0.300
0.239
0.251
0.188
2
5
1
3
10
4
12
19
11
22
17
36
33
40
In comparison, our system which relies on object and event
understanding offers better capability of selecting clips that
maximize content inclusion. This undoubtedly leads to better
understanding of summaries. The factors such as excluding
undesirable content by stock localization and domain specific
knowledge also greatly enhance the summary quality in terms
of content conciseness and enjoyability.
For the efficiency issue, the overall complexity of the whole
system is basically O(L) where L is the original video length.
The system time is about 5L which varies according to the
structure of the rushes videos (e.g., the percentages of stock
footages and retakes). The feature extraction stage, especially
object and face detection, keypoint matching and tracking,
consumes most of the computational time, up to 3 times of
the video duration. Stock footage classification can be done
in video playing time, while summary generation takes only
few minutes. Overall, object and event based video summarization inevitably consumes more time while producing better
summaries. According to the evaluation in [28], when system
efficiency is considered, our system is still ranked 2, 4, and
13 among all the 43 runs under different evaluation settings.
C. Subjective Evaluation
After having compared our approach with other existing
systems in TRECVID BBC rushes summarization task, in
this section, we conduct a subjective evaluation for collecting
user comments. Besides our approach, we also implement
another two algorithms for comparison. The first one is done
by simply speeding up the videos by 50 times as in [6]. For the
second algorithm, after removing the junk materials, shots are
clustered based on color and edge histograms. The longest shot
from each cluster is selected. The number of faces and motion
intensity are used to rank the shots for summary generation.
For evaluation, 39 videos from TRECVID 2008 BBC testing
dataset are used. We invite 24 people and partition them into
IEEE TRANSACTIONS ON MULTIMEDIA
11
6 groups to grade the summaries. Each group is assigned 6
to 7 videos. For each video, the original video is first played.
The judges are then asked to watch and grade the summaries
generated by different approaches. The order of playing the
summaries is random and unknown to the judges. They are
asked to score the summaries by answering the following
questions:
1) Can the summary completely describe the content in the
original videos? (Completeness)
2) Is the summary with the least redundancy? (Elegancy)
3) How easy is it to grasp the story in the summary? (Easy to
understand)
4) How pleasant do you feel to watch the summaries? (Enjoyability)
The score for each question ranges from 1-10, with 10
meaning the best. The medians of the scores for different
approaches are shown in Table VI.
TABLE VI
S UBJECTIVE EVALUATION AND COMPARISON OF SUMMARIES .
Approach
Sampling
Shot clustering
Ours
Completeness Elegancy Easy to understand Enjoyability
9.00
6.75
8.50
2.25
8.25
8.00
5.50
7.50
8.75
4.50
5.25
7.50
The summaries by even sampling are assumed to contain
most information in the original videos. From Table VI, we can
see that this approach does not score much higher than ours. In
term of elegancy of summaries, sampling approach inevitably
include most of the repetitive shots and scores the lowest. Most
judges comment that our summaries already include most
materials that are important to describe the stories completely.
Few missing objects/events do not affect their understanding
of the storylines. The motion intensity is a useful hint to
detect some events and decide the usability of the video clips.
However, some events are actually not motion intensive and
thus ignored by being assigned a low preference. For elegancy,
motion intensity based approach achieves a slightly higher
score than ours since we do not remove those similar shots
far away from each other in order to smooth the storytelling.
The last two criterions are used to evaluate the usabilities
of summaries. For both of them, our approach gets the highest
scores. Most judges feel the rhythm of the sampling approach
unpleasant. It is not easy to find what exactly happens in the
video. The reason lies in two aspects. First, many junk and
repetitive shots are included, which break the storytelling from
time to time. Second, since the summary is played at 50 times
faster than the original video, people have to receive too much
visual information at high speed. Furthermore, it is difficult to
locate the useful materials when playing the videos at a very
high speed. Although it includes most materials, few people
would not like to watch videos in such a rhythm for long time.
By mainly focusing on the motion intensive clips, the
second approach distorts the rhythm of the storytelling, and
thus reduces the usability and enjoyablity of the summaries.
Instead, based on object and event understanding, our approach
selects the most representative clips and removing those predictable ones to produce summaries. Since the clip selection
follows the storyline of the original videos, our summaries
proved to be elegant with good rhythm and users can easily
capture the desired information.
VII. C ONCLUSION
In this paper, we have presented our approaches for the
exploitation of rushes videos by automatically stock footage
localization and video summarization. In stock footage classification, by taking into account the sequential patterns of the
motion features, the proposed two-level hierarchical hidden
Markov model (HHMM) is capable of modelling statistical
mapping from low-level motion features to high-level semantic
concepts. Experimental results show that our approach significantly outperforms other methods such as SVM, FSM and
HMM. In video summarization, the extracted visual and audio
features are effective to detect the object and event occurrences. The proposed representability measure helps select the
most representative video clips for summary generation. The
evaluation results in TRECVID BBC summarization task and
subjective evaluation show that our summaries are encouraging
at preserving the semantic content and storyline of the given
video with pleasant rhythm and concise information.
For the future work, the accuracy of stock footage localization can be improved by also considering the visual qualities
of video segments and other multi-modality cues in addition
to motion features. Our summarization work demonstrates that
the analysis of objects and events show promising for video
summarization towards semantic understanding. The proposed
techniques of object and event understanding can be employed
for both edited and home video summarization.
ACKNOWLEDGEMENT
The work described in this paper was supported by a grant
from the Research Grants Council of the Hong Kong Special
Administrative Region, China (CityU 119610).
R EFERENCES
[1] B. P. Allen, V. A. Petrushin, G. Wei, and D. Roqueiro, “Semantic Web
Techniques for Searching and Navigating Video Shots in BBC Rushes”,
NIST TRECVID Workshop, 2006.
[2] W. Bailer and G. Thallinger, “A Framework for Multimedia Content
Abstraction and its Application to Rushes Exploitation”, ACM Conf. on
Image and Video Retrieval, 2007.
[3] W. Bailer and G. Thallinger, “Comparison of Content Selection Methods
for Skimming Rushes Video”, TRECVID Workshop on BBC Rushes
Summarization in ACM Multimedia, 2008.
[4] D. Byrne, P. Kehoe, H. Lee, C. Conaire and A. F. Smeaton, “A UserCentered Approach to Rushes Summarization Via Highlight-Detected
keyframes”, TRECVID Workshop on BBC Rushes Summarization at ACM
Multimedia, 2007.
[5] F. Chen, M. Cooper and J. Adcock, “Video summarization preserving
dynamic content”, TRECVID Workshop on BBC Rushes Summarization
at ACM Multimedia, 2007.
[6] M. G. Christel, A. G. Hauptmann, W. Lin, M. Chen, J. Yang, B. Maher,
and R. Baron, “Exploring the Utility of Fast-Forward Surrogates for BBC
Rushes”, TRECVID Workshop on BBC Rushes Summarization in ACM
Multimedia, 2008.
[7] E. Dumont and B. Merialdo, “Split-Screen Dynamically Accelerated
Video Summaries”, TRECVID Workshop on BBC Rushes Summarization
at ACM Multimedia, 2007.
[8] A. M. Ferman and A. M. Tekalp, “Two-stage hierarchical video summary
extraction to match low-level user browsing preerences”, IEEE Trans. on
Multimedia, vol. 5, no. 2, pp. 244-256, 2003.
IEEE TRANSACTIONS ON MULTIMEDIA
[9] A. G. Hauptmann, Michael G. Christel, W. Lin, Bryan Maher, J. Yang,
Robert V. Baron, and G. Xiang, “Clever Clustering vs. Simple Speed-Up
for Summarizing BBC Rushes”, TRECVID Workshop on BBC Rushes
Summarization at ACM Multimedia, 2007.
[10] X. S. Hua, T. Mei, W. Lai, M. Wang, J. Tang, G. J. Qi, L. Li, and
Z. Gu, “Microsoft Research Asia TRECVID 2006 High-Level Feature
Extraction and Rushes Exploitation”, NIST TRECVID Workshop, 2006.
[11] K. Ishihara and Y. Sakai, “BBC rush summarization and High-Level
Feature extraction In TRECVID2008”, NIST TRECVID Workshop, 2008.
[12] C. Kim and J.-N. Hwang, “Object-Based Video Abstraction for Video
Surveillance Systems”, IEEE Trans. on Circuits and Systems for Video
Technology, vol. 12, no. 12, 2002.
[13] M. Koskela, M. Sjoberg, V. Viitaniemi, and J. Laaksonen, “PicSOM
Experiments in TRECVID2008”, NIST TRECVID Workshop, 2008.
[14] Yang Liu, Yan Liu, T. Ren, and K. C. Chan, “Rushes Video Summarization using Audio-Visual Information and Sequence Alignment”,
TRECVID Workshop on BBC Rushes Summarization in ACM Multimedia,
2008.
[15] Z. Liu, E. Zavesky, B. Shahraray, D. Gibbon, and A. Basso, “Brief
and High-Interest Video Summary Generation: Evaluating the AT&T
Labs Rushes Summarization”, TRECVID Workshop on BBC Rushes
Summarization in ACM Multimedia, 2008.
[16] Y. F. Ma, L. Lu, H. J. Zhang, and M. Li, A User Attention Model for
Video Summarization, ACM Multimedia Conf., 2002.
[17] T. Mei, X. S. Hua, C. Z. Zhu, H. Q. Zhou, and S. Li, “Home Video
Visual Quality Assessment with Spatiotemporal Factors”, IEEE Trans. on
Circuits and Systems for Video Technology, vol. 17, no. 6, 2007.
[18] S. Naci, U. Damnjanovic, B. Mansencal, J. B. Pineau, C. Kaes, M. Corvaglia, E. Rossi, and N. Aginako, “The COST292 Experimental Framework for Rushes Summarization Task in TRECVID 2008”, TRECVID
Workshop on BBC Rushes Summarization in ACM Multimedia, 2008.
[19] J. Nam and A. H. Tewfik, “Dynamic Video Summarization and Visualization”, ACM Multimedia Conf., 1999.
[20] C. W. Ngo, T. C. Pong and Roland T. Chin, “Video partitioning by
temporal slice coherency”, IEEE Trans. on Circuits and Systems for Video
Technology, vol. 11, no. 8, 2001.
[21] C. W. Ngo, Z. Pan, and X. Y. Wei, “Hierarchical Hidden Markov Model
for Rushes Structuring and Indexing”, ACM Int. Conf. on Image and Video
Retrieval, 2006.
[22] C. W. Ngo, W. L. Zhao, and Y. G. Jiang, “Fast Tracking of NearDuplicate Keyframes in Broadcast Domain with Transitivity Propagation”, ACM Multimedia Conf., 2006.
[23] C. W. Ngo, Z. Pan, X. Wei, X. Wu, H. K. Tan, and W. Zhao,
“Motion Driven Approaches to Shot Boundary Detection, Low-Level
Feature Extraction and BBC Rushes Characterization at TRECVID 2005”,
TRECVID Workshop, 2005.
[24] Paul Over, Alan F. Smeaton, and Philip Kelly, “The TRECVID 2007
BBC Rushes Summarization Evaluation Pilot”, TRECVID Workshop on
BBC Rushes Summarization in ACM Multimedia, 2007.
[25] Paul Over, Alan F. Smeaton, and G. Awad, “The TRECVID 2008 BBC
Rushes Summarization Evaluation”, TRECVID Workshop on BBC Rushes
Summarization in ACM Multimedia, 2008.
[26] Z. Pan and C. W Ngo, “Structuring home video by snippet detection and
pattern parsing”, ACM SIGMM International workshop on Multimedia
Information Retrieval, 2004.
[27] Z. Pan and C. W. Ngo, “Moving Object Detection, Association and
Selection in Home Videos”, IEEE Trans. on Multimedia, vol. 9, no. 2,
2007.
[28] J. Ren and J. Jiang, “Hierarchical Modeling and Adaptive Clustering for
Real-Time Summarization of Rushes Videos”, IEEE Trans. on Multimedia, vol. 11, no. 5, 2009.
[29] J. Ren and J. Jiang, “Hierarchical Modeling and Adaptive Clustering for
Real-Time Summarization of Rushes Videos in TRECVID’08”, TRECVID
Workshop on BBC Rushes Summarization in ACM Multimedia, 2008.
[30] Peter J. Rousseeuw and Annick M. Leroy, “Robust regression and outlier
detection”, Wiley New York, 1987.
[31] J. Sasongko, C. Rohr, and D. Tjondronegoro, “Efficient Generation
of Pleasant Video Summaries”, TRECVID Workshop on BBC Rushes
Summarization in ACM Multimedia, 2008.
[32] L. Tang, T. Mei, and X. S. Hua, “Near-lossless video summarization”,
ACM Multimedia, 2009.
[33] S. Tang, Y. Zhang, J. Li, X. Pan, T. Xia, and M. Li, “Rushes Exploitation
2006 By CAS MCG”, NIST TRECVID Workshop, 2006.
[34] C. M. Taskiran, Z. Pizlo, A. Amir, D. Ponceleon, and E. Delp, “Automated Video Program Summarization Using Speech Transcripts”, IEEE
Trans. on Multimedia, vol. 8, no. 4, pp. 775-791, 2006.
12
[35] B. T. Truong and S. Venkatesh, “Video Abstraction: A Systematic
Review and Classification”, ACM Trans. on Multimedia Computing,
Communications and Applications, vol. 3, no. 1, 2006.
[36] B. T. Truong and S. Venkatesh, “Curtin at Trecvid 2006 - Rushes
Summarization”, NIST TRECVID Workshop, 2006.
[37] B. T. Truong and S. Venkatesh, “Generating Comprehensible Summaries
of Rushes Sequences based on Robust Feature Matching”, TRECVID
Workshop on Rushes Summarization at ACM Mltimedia, 2007.
[38] F. Wang and C. W. Ngo, “Rushes Video Summarization by Object and
Event Understanding”, TRECVID Workshop on Rushes Summarization at
ACM Mltimedia, 2007.
[39] M. Wang, X. S. Hua, R. Hong, J. Tang, G. J. Qi, and Y. Song, “Unified
Video Annotation via Multigraph Learning”, IEEE Trans. on Circuits and
Systems for Video Technology, vol. 19, no. 5, 2009.
[40] M. Wang, X. S. Hua, J. Tang, and R. Hong, “Beyond Distance Measurement: Constructing Neighborhood Similarity for Video Annotation”,
IEEE Trans. on Multimedia, vol. 11, no. 3, 2009.
[41] T. Wang, S. Feng, P. P. Wang, W. Hu, S. Zhang, W. Zhang, Y. Du,
J. Li, J. Li, and Y. Zhang, “THU-Intel at Rushes Summarization of
TRECVID 2008”, TRECVID Workshop on BBC Rushes Summarization
in ACM Multimedia, 2008.
[42] L. Xie, S. Chang, A. Divakaran, and H. Sun, “Learning Hierarchical
Hidden Markov Models for Video Structure Discovery”, Columbia University Technical Report, 2002.
[43] J. You, G. Liu, L. Sun, and H. Li, “A Multiple Visual Models Based
Perceptive Analysis Framework for Multilevel Video Summarization”,
IEEE Trans. on Circuits and Systems for Video Technology, vol. 17, no.
3, 2007.
[44] W. L. Zhao, C. W. Ngo, H. K. Tan, and X. Wu, “Near-Duplicate
Keyframe Identification with Interest Point Matching and Pattern Learning”, IEEE Trans. on Multimedia, vol. 9, pp. 1037-1048, 2007.
[45] Face Detection Project at CMU, “http://vasc.ri.cmu.edu/NNFaceDetector/”.
[46] TRECVID Workshop, “http://www-nlpir.nist.gov/projects/trecvid”.
Feng Wang received his PhD in Computer Science
from the Hong Kong University of Science and
Technology in 2007 and BSc from Fudan University,
China, in 2001. Before joining East China Normal
University as an associate professor in the Dept.
of Computer Science and Technology, he was a
research fellow in City University of Hong Kong
and Institute Eurecom, France. His research interests
include multimedia computing, pattern recognition
and IT in education.
Chong-Wah Ngo (M02) received his Ph.D in Computer Science from the Hong Kong University of
Science & Technology in 2000. He received his
MSc and BSc, both in Computer Engineering, from
Nanyang Technological University of Singapore. He
is currently an Associate Professor in City University
of Hong Kong. He was with Beckman Institute of
University of Illinois in Urbana-Champaign as postdoctoral researcher, and with Microsoft Research
Asia as visiting researcher. He is the program cochair of ACM Multimedia Modeling (MMM) 2012
and International Conference on Multimedia Retrieval (ICMR) 2012. His
research interests include video computing and multimedia information retrieval.
 0
0
advertisement
Related documents

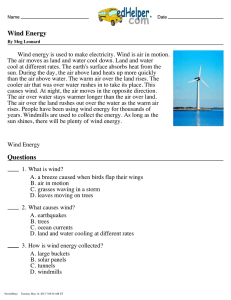


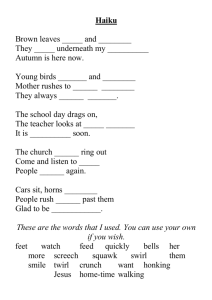

Download
advertisement
Add this document to collection(s)
You can add this document to your study collection(s)
Sign in Available only to authorized usersAdd this document to saved
You can add this document to your saved list
Sign in Available only to authorized users