A research based proposal on teaching learning physics in the... Marisa Michelini, Alberto Stefanel
advertisement

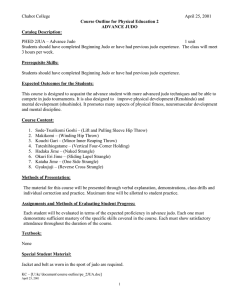
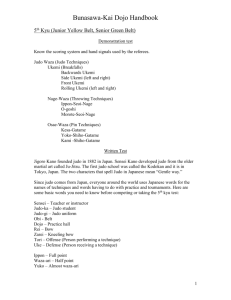
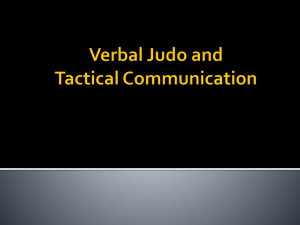
A research based proposal on teaching learning physics in the context of Judo Marisa Michelini, Alberto Stefanel The fact that < Vz > = 0 m/s for the first 0.68 s tells us that the right hip remains at the same level of advanced standing when U start the rotation, even when U has the right foot in contact with the ground, the stage of loading on the spine of T. esearch Unit in Physics Education, niversity of Udine, via delle Scienze 206, 33100 Udine, Italy alberto.stefanel@uniud.it Introduction Sport offers many opportunities to evidence how physics constructs models of real-life phenomena starting from first principles (Armenti 1992; Goff 2004; Bradamante et al, 2004; Heck, Ellermaijer 2009): selecting aspects to be analyzed and the theoretical framework in which these aspects are included; using the formal tools to describe in detail only those aspects (Sperandeo, Sassi 2002); providing the ability to interpret processes and predict the evolution of the phenomena under observation (Bednar et al 1991; Hesteness 1987, 1992, Michelini et al 2002;). The modeling activities and opportunities, that are provided by the new information and communication technologies (Bednar 1991; Aiello et al. 1997; Thornton, Sokoloff 1999, Michelini et al. 2002; Heck, Ellermaijer 2009), become powerful teaching tools through which to give answer to many difficulties in teaching and learning physics at school. In particular it is well known that in the context of mechanics many students learning difficulties in linking real phenomena and scientific knowledge (McDermott et al 1987; Duit 2009) are related to the reductionist educational approaches in mechanics, that stress on the rectilinear uniform motion and on the motion of a material point, without giving to the students the instruments to understand what part of real phenomena it is possible describe with this kind of models and what kind of modeling process is at the base of physics interpretation of the natural phenomena (Michelini et al 2002). The challenge is therefore to change the perspective with which to teach physics, from situations, that students recognize as real, close to their everyday life, such as those offered by sport, and show how physics, in relatively simple way, is able to describe complex phenomena basing on a few principles core. Here we present the main points of a research based educational proposal aims to introduce physics at secondary level using judo as context to explore interactions, energy exchange, body motion. Research questions. The present contribution aims to answer the following research questions: How can we describe, in terms of physical quantities and physical models, processes as complex as that of a judo throwing technique? That is: What aspects of a complex action, such as a projection of Judo, can be described by the simplest models that physics can build? RQ2) What can say us physics on judo? That is: What physical principles are particularly evident in the dynamic action of judo and which of these can be effectively offered in secondary school? RQ3) What tools and ICT can be used to build an educational path? The main points of the educational path. Here is presented a proposal of teaching activities, taking as examples only two throwing techniques between the over hundred encoded ones in judo: the seoi-nage and the okuri-ashi-barai. 1. The throwing techniques of judo and the choice of items to look at What characterizes a combat sports such as judo, compared to other sports contexts, is that in a typical throw technique as those illustrated in the figure 1, the two athletes Tori (T below) and Uke (U below) always interacting one with the other. In the context of judo, the two interacting systems (U and T) are always clearly identified and separated and, therefore, the interactions between them are always identifiable, even if it is not easy to directly measure the forces in the interaction. Instead, you can directly measure from movies the kinematic quantities of the athletes as suggested in the literature (Sacripanti 1996, Blaise et al 2002) and to derive from this information, the dynamics of interacting systems. The choice, that was made, is to focus attention on the motion of U to reconstruct, through simple models, the dynamic conditions that make it possible. T U U T Figure 1From: http://www.intjudo.eu/ 2. Rotate a body by applying a force couple: the Seoi-nage In a typical technique of judo, for example the seoi-nage, the basic texts on judo highlight the importance that the center of mass of T is lower than that of U, so that the action of force couples applied to U from T to be effective, as in the reported illustrations of the text of Toyokazu Nomura, Olympic champion in Munich 1972 (T. Nomura 1993). THE MOVEMENT OF THE LEVER Figure 3 From: Nomura 1996 The description of the phenomenon. Through analysis of a video, that here is performed using image processing tools that are available on all PCs, as shown in other work (Michelini, Stefanel 2010), it is possible to recognize four elements of discontinuity: the initiation of movement where U and T begin to move on the mat; at the start of Kuzushi, in which T pull U and start to rotate; the beginning when U comes in contact with the back of T; the beginning of phase where U is detached from the back of T and falls on the back. This motivates the division of the motion in four phases, which are described referring the motion to a defined reference system as shown in the figure 4 Figure 2 From: Nomura 1996 This highlights one hand that the body of U-turns around an axis passing approximately through the right hip, the other that the center of U, as if they might not know the exact location of the few elements available in first three phases of the throwing technique analyzer is appreciable vertical movements. The body of substantially U moves forward by inertia. Only a slight acceleration produces a small increase in forward speed U in the horizontal direction (along the y-axis). It is only the last stage that the body of U moves vertically, initially with a forward motion oblique to 75 °, then gradually more and more vertically, with average acceleration equal to 8.2 m s-2. The dynamics of motion. What forces act to produce the observed motion? What Shoulder: Linear speed resultant do they have? What is the resultant momentum of forces? The acceleration of fall is less than that of gravity and also is not directed vertically, showing how the interaction between U and T will continue even in the last phase of the fall. The forces, that T apply to U, have a not null resultant in the y direction (horizontal), and these do not work, in average, against the gravitational field and determine a moment of forces that produces only the rotation of the body of U. The body mass of U is 80 kg. The resultant of forces acting horizontally is therefore approximately 90 N in the first three phases, and 400 N in the first part of Phase IV Shoulder: Angolar speed (in which there is still a forward acceleration of U). Shoulder: Angolar speed The rotational motion of the body of U can Hip: vx be modeled with that of a rigid body (a rigid cylinder M = 80 kg, h = 1.6 m, r = 0.13 2 m and a inertia moment I = 17.4 kg m ), subject to the action of a moment of force constant which determines a rotation around a transverse axis of gravity with -2 constant angular acceleration of 14 rad s . Hip: vy Fig.6. Linear speed and angular speed fo the shoulder From the second law of dynamics Cardinal (M = I dw/dt), we obtain that the moment applied to the cylinder has to be 244 N m. It can be generated by a couple of forces of 163 N applied at the ends of each cylinder, as in phase II, namely a couple of forces of 326 N, applied in the center of gravity and the other to one end of the cylinder, as actually occurs in the phase III loading on the back of U of T). Fig.7. Components of the linear speed of the hip. From the second law of dynamics Cardinal (M = I dw/dt), we obtain that the moment applied to the cylinder has to be 244 N m. It can be generated by a couple of forces of 163 N applied at the ends of each cylinder, as in phase II, namely a couple of forces of 326 N, applied in the center of gravity and the other to one end of the cylinder, as actually occurs in the phase III loading on the back of U of T). We observe that once the action has been initiated, the force applied with the hands by T cannot vary appreciably, because the distances do not vary substantially between T and U. The increase in the force couple applied to be mainly due to the thrust, which T applies to the U with his back. This confirms what is found in the literature about the action of T on U (Blais et al . 2001). All the action that T makes for projecting U executing seoi-nage, then resolves in the rotation of the U body without changing appreciably the center of mass height, and then accompanies him on the final fall to the ground. Performed the dynamic analysis, a question remains: why the action of judo is so efficient in producing its result? How does a person of little mass to throw a massive person to the ground? To fully understand the action of seoi-nage is important to stress the following two important aspects of the crucial phase of the technique, which is when we move from Phase I to Phase II. The first concerns the way in which T can be applied effectively forces the time needed to start the rotation of the body of U. In the figure (Nomura 1996) are stylized U and T. T applies a force with his left arm on his right arm from a standing position the first U (I) and squat (II). This, as mentioned earlier, is used to lower the center of mass of T compared to U and let the load on his back. This movement, accompanied by a large traction toward the front with his left arm, allows T, to equal the applied force, to apply the greatest possible time to U, when it is loaded on the back (III). A simply simulation effectively realize this point. The second issue is how to make efficient the coupling between the T and U, so that, when the same force applied, it has the greatest possible increase of angular velocity of U (this is a very important factor in determining 'effectiveness not only from a competitive point of view, but also in terms of its formal correctness). As we observed the motion of the abdomen of U until it has already entered into rotation, continues to be in a straight line with a speed that increases, even if only slightly in the direction of motion of U. To achieve this it is necessary that T acts with forces that are in phase with the movement of U. In other words, it is necessary that you implement some sort of resonance between T and U. It is well known in physics that the resonance has an essential role in coupling systems. Judo can provide an opportunity to understand in the context of sport in what is the resonant coupling of two systems and because it enables an efficient transfer of energy, momentum and / or angular momentum. We will not dwell further on how this coupling is realized in the case of seoi-nage, preferring to discuss analyzing another throwing technique: the Okuri-ashi-barai. 3. Resonant coupling of two systems: Okuri-ashi-barai The same discussion made for the seoi-nage technique can be repeated in the case of Okuri-ashibarai. We had chosen to analyze the motion of the left shoulder of U and the knot of his belt, which lies a few inches below her navel. From the analysis of motion of the points considered, we recognize three phases: Fig.8. The phases of de ashi Barai Fig.9. The trajetories of the Shoulder and of the belt knot. Phase I (from 0.00 s to 0.40 s) - U moves with approximately uniform rectilinear motion along the y direction, T back with approximately uniform motion and makes a rotation around an axis parallel to z. Phase II (from 0.40 s to 68 s) - U moves rotating, as results of the composition of two rotations, of which we consider only one around an axis parallel to x through the support point of the right foot of U; T is lowered, remaining in a fixed point on the xy plane and bringing its center of mass low as possible compared to that of U, as described before. Phase 1 (from 0.00 to 0.40 s): the horizontal displacement, with the classic vertical oscillation due to the distance (emphasized here by the z fact that they are skipping the side). Phase 2 (from 0.40 to 0:56 s): T and U are strongly coupled. The basin of U continues almost uniform horizontal motion while the body of U begins to rotate around an axis passing approximately through his left shoulder that is nearly stationary. U T UT y Phase 3 (0.56 -0.92 s): U describes a motion almost vertical drop to the mat. -1 -1 In Phase 2, the rotational motion of U is done with average speed of 0.3 rad s , the first part of phase 3 with angular velocity 10 rad s . The x -1 acceleration of vertical drop is on average 0.76 m s . Figure 4 – Seoi-nage: phase I Although the Okura-ashi-barai is a technique very different from seoi-nage, also in this case a force momentum is applied on U that rotates Phase III (from 0.68 s to 0.76 s) U rotates around an -1 with angular acceleration of 19 rad s , higher than the previous case. axis parallel to x, T moves in the z direction rising We simulate the motion of U with that of a cylindrical rigid body is obtained slightly while turning the torso around a vertical axis z which is necessary to apply a resultant moment of 330 N m (obtained with a Phase IV (0.76 s a 1.08 s) - U rotates around an axis pair of forces of 206 N applied at the ends of the cylinder). parallel to x, passing approximately through the U The essential and more evident aspect of this throwing technique is the center of mass. This axis in turn rotates around an T y axis parallel to the x and y goes down T: only moves in resonant coupling between T and U. To understand this action we can analyze how a pendulum can effectively transfer energy and momentum to another the z direction rising. x pendulum of different lenght, as shown in the sequence extracted from a Figure 4 – Seoi-nage: phase II simulation realized in the Interactive physics environment The motion of U is a complex movement roto-traslazional which would require a (http://www.design-simulation.com/ip/index.php). When the first pendulum full description of its analysis on three planes: zy (side view of the action, which is hit the second one in phase, the oscillation amplitude of the secon increase z the choice for shooting with the camera used in the movie), zx (frontal view over evidently. to the initial direction of motion of the two athletes), xy (view from the action). U We observe that only in phase II is involved in a significant interaction between Conclusions Fig.10 Simulation of the resonant coupòling of two pendulums. T y the mat and the foot of U and only in phase IV, the motion is predominantly The context of sport offers many opportunities to evidence how physics can construct models analyzing complex and not controlled determined by the weight force acts on U. Overall, the rotational movement of phenomena. A proposal for physics in the context of judo was designed, starting from a video-analysis of throwing actions and modeling of x the body of U occurs upon interaction with T. the motion using a rigid body model. Figure 4 – Seoi-nage: phase III The outlined path starts from the description of the trajectory of significant points of Uke's body and it provides a description of movement Since our goal is not to account for all the details of in space. This enables us to see what actually happens in the process and to selecting the interesting aspects, in particular allowing to the phenomenon, but just to characterize the identify the critical points of the motion (related to the instants of discontinuity in external conditions for U) (RQ1). interaction between the athletes, we can choose He presented modality can be used in all school provided by computers, because use the standard tools for picture elaboration. Can be to restrict the analysis to only motion on the zy also simply implemented using commercial didactic tools usable for image analysis (RQ3). z U plane on which lie mainly in directions d 'action of The analysis of a throwing technique is performed in three steps: video-analysis of the trajectory of two points (the shoulder and the hip) y T the forces of interaction between T and U only in of the body of Uke; kinematical analysis and description of the motion of the selected points (RQ1); construction of simple rigid body x the phases II, III, IV. models that explain the observed motion to extract information of the couple of forces acting on Uke and applied by Tori. The action of the couple of forces is proposed analyzing in detail the seoi-nage techniques (RQ2). The efficient transfer of energy, momentum and angular Figure 4 – Seoi-nage: phase IV momentum in the judo throwing action is also considered. It is particularly evident in the case of okuri-ashi-barai technique. It give the opportunity to show with a simulation, realized with a commercial simulation software (RQ3) of two pendulum how it is possible realize an The trajectory points of the body. What kinds of trajectory describe the individual parts of the body of U in the plane zy chosen for analysis? To efficient coupling between two physical system (RQ2). answer this question, we can restrict the detailed analysis of just two points on the body of U: the right shoulder, right hip, which allow describing The future goal of the research is to construct an educational path, based on the line here described, and the related didactic instruments, in good detail the motion of the trunk of U. They were selected from among the points which recognizes significant biomechanics to describe the experiment and validate the proposal in pilot classes and monitor the learning path of students. All materials will be offered on the web for different parts of the body (Sacripanti 1996; Blaise 2001) physics and physics education teachers. The analysis of the motion of the shoulder and hip motion, allow to point out that the trajectory followed by different parts of the body of U is a Bibliography kind of spiral as shown in the fig. 5. Figure 5 – Seoi-nage: The trajectory of the shoulder Figure 5 – Seoi-nage: The trajectory of the hip From the analysis of the variation in the direction of the displacement vector can be deduced the evolution of the instantaneous angular velocity. It is on average increased approximately linearly (see graph), as might be expected in a spiral motion with near-uniform velocity, from 0 rad s-1 to 10 rad s-1 in 0.7 s, an angular acceleration average of 14 rad s-2 (you can make a rough estimate considering that the body of U rotates to 3 / 2 in 0.7 s with an average speed of about 6.7 m s-1 which is in good agreement with the average value of 6.8 m s-1della angular velocity measured by the video). from 0.00 s to from 0.68 s to 1.08 s 0.68 s <Vy>= 2 m/s <Vy>= 0.93 m/s <ay> = 1,3 m/s2 <ay> = -5.9 m/s2 <Vz>= 0 m/s <Vz>= -1.95 m/s <az> = 0 m/s2 <az> = -5.8 m/s2 The similar analysis of motion of right hip U leads to a recognition essentially two trends: 0.0 - 0.68 s (range corrensponding to the phases I, II and III) and 0.68 -8.1 s (range corresponding to the phase IV), characterized by the data shown in the table. Aiello M L, Balzano E, Bergomi N, Borghi L, Giordano E, Capocchiani V, Corni F, De Ambrosis A, Marioni C, Mascheretti P, Mazzega E, Michelini M, Robutti O, Santi L, Sassi E, Sperandeo Mineo R M , Viglietta L, Vegni G, Violino P (1997) Teaching mechanical oscillations using an integrate curriculum, International Journal in research on Science Education, 19, 8, pp.981-995. Armenti, A. ed. (1992) The physics of sport, New York: American Institute of Physics. Bednar, Ak., Cunningam, D., Duffy, Tm., And Perry, J.D. (1991)Theory into practice. How do we link?, in Instructional technology. Past, present and future, J.C. Angelin ed., Englewood, Colorado, Libraries Unlimited. Blais L, El Mouhaid K, Trilles F & Lacouture P. (2001). Contribution à la validation d’un appareil de musculation spécifique au judo par l’analyse mécanique de deux projections - O Soto Gari et Morote Seoi Nage - pratiquées selon deux contextes de pratique. IXème Congrès International des Chercheurs en Activités Physiques et Sportives - 1, 3 Novembre 2001 – Valence; Blaise L, B, Trilles, F. et Decatoire A. Analyse mécanique comparative de deux modalités de pratique d'une projection de judo : exemple de morote seoï nage, formes hikidashi et tobikomi. Blaise L, B, Trilles, F. et Decatoire A. L'analyse mécanique pour mieux comprendre la technique des champions. http://judo-poitoucharentes.ifrance.com/judo-poitou-charentes/recherche.htm. Bradamante F., Michelini M., Stefanel A. (2004) The modelling in the sport for physic’s learning: fosbury-flop and judo’s cases, in Mechlova E ed. Teaching and learning physics in new context, Girep-Ostrava University, pp.206-208. Duit R. (2009) Bibliography STCSE, Students' and Teachers' Conceptions and Science Education, at http://www.ipn.uni-kiel.de/aktuell/stcse/stcse.html Goff J.E. (2004) A Fun General Education Physics Course: Physics of Sports, THE PHYSICS TEACHER, 42, pp. 280-283 Heck A., Ellermeijer T. (2009) Giving students the run of sprinting models, Am. J. Phys. 77 (11), pp. 1028-1038. Hestenes, D., Toward a modeling theory of physics instruction, Am. J. Phys., 55, 1987, p. 440- 454 Hestenes, D. Modeling games in the Newtonian World, Am. J. Phys., 60, 1992, p. 732- 748. Michelini, M., Santi, L., Sperandeo, RM (2002) Proposte didattiche su forse e movimento, Udine, Forum. Michelini M, Stefanel A. (2010) Video analysis of judo situations to learn physics, Michelini M. Ed., Proceedings of the Physics Teaching and Learning 14 Workshop, at http://www.fisica.uniud.it/URDF/mptl14/contents.htm Mcdermott, L., Resenquist, Ml., Van Zee, Eh (1987). Student difficulties in connecting graphs and physics: Examples from Kinematics, Am. J. Phys., 55, pp. 503-513. Nomura T (1993) Il seoi nage, T Nomura e Judo Kuroki eds, Udine: Arti Grafiche. Sacripanti, A. (1996) Biomeccanica degli sport da combattimento, Ed. FILPJK, Roma. Sperandeo R.M., Sassi E. (2002) I modelli fisici ed il processo di modellizzazione, in M Michelni, L Santi, RM Sperandeo, Proposte didattiche su forza e movimento, Udine: Forum, pp. 26-28. Thornton, RK., And Sokoloff DR (1999). Learning motion concepts using real-time microcomputer-based laboratory tools, Am. J. Phys. 58 (9), pp. 858-867