471/Lectures/notes/lecture 28 Principal planes, laser cavities.pptx
advertisement

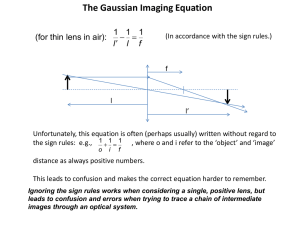
Imaging ABCD matrix can represent an imaging system, including object distance do and image distance di optics yf f A B yi Ayi Bi Cy D i C D total i i B ABCDtotal condition for imaging! _____ = 0. Why? Because rays of all (small) angles must go to the image! Magnification y2 Definition: M , the relation for M you can always trust y1 A Which element of ABCDtotal gives M for an optical system? ______ Choose A B C D y2 A B y1 2 C D 1 Mirror/thin lens imaging equation 1 1 1 f do di 1 1 f 0 1 Derive the thin lens equation: …it’s easy y2 M y1 this approx works only for the similar triangles of thin lens imaging! 1 1 1 f do di doesn’t work for a thick lens. Using ABCD we got for a thick lens, sketch out how you would find a “thick” lens imaging equation. a) b) I tried but got it mostly wrong I got it mostly right Sketch out how you would find the magnification M for a thick lens imaging setup in terms of do and di. a) b) I got it mostly right I tried but got it mostly wrong 1 0 y1 y2 n n 1 R n n i t 1 2 i t a Principal planes method For the purposes of finding images, we can* reduce an optical system to a thin lens. Principal plane distances p1 and p2 are “added” to the physical system, and distances do and di are measured from the planes. (*The system must begin and end in the same index). Principal planes method 1 0 p2 A B 1 1 C D physical 0 1 A B C D effective 1 f eff p1 A p2C C 1 0 1 Imaging equation: Magnification p1 or p2 can be negative p1 A B p1 p2C p2 D p1C D Since these = 1, then = 0. For a thick lens ABCD physical d 1 1 1 R1 n 2 n 1 d n 1 1 1 nR1 R2 R1 R2 d 1 1 1 R2 n d n Assume thickness d=2 cm, R1 = 2 cm, R2 = and n=2 The effective focal length is ___ cm a) 1 b) 2 c) 3 d) 4 e) 5 A p2C C p1 A B p1 p2C p2 D 1 1 f p1C D eff 0 1 For a thick lens ABCDphysical d 1 1 1 R1 n 2 n 1 d n 1 1 1 nR1 R2 R1 R2 d 1 1 1 R2 n d n Assume thickness d=2 cm, R1 = 2 cm, R2 = and n=2 The principal planes are ___ cm from the edges 1 and 2 a) 2, 3 b) 0, 2 c) 0, -1 d) 1, 4 A p2C C p1 A B p1 p2C p2 D 1 1 f p1C D eff 0 1 Where will parallel laser light (object at infinity) be focused if coming from the left? …if from the right? If an object is 3 cm to the left of the lens edge, find the position of the image vs the right edge. Two equivalent methods 1. Today’s: Add principal planes matrices to find ABCDeffective Set the diagonal elements to 1 to find p’s Treat as thin lens, use thin lens imaging equation 2. Last lecture: Add do and di matrices to find ABCDtotal Find imaging equation by setting Btotal = 0. (only 2. will work for water to air imaging) Laser stability criterion Stability: , y remain small after many round trips A B 1 L 1 2 R C D 0 1 2 1 1 A D 1 2 01 L 1 0 1 0 1 2 R1 1 L L 0 1 1 1 R1 R2 http://stwww.weizmann.ac.il/Lasers/laserweb/Java/Cav ityB/Cavstabe2.htm java rays in cavity…good Choose Confocal 25 25 25. Adjust numbers only by arrows!. left click in yellow medium, then right click start a ray. http://stwww.weizmann.ac.il/Lasers/laserweb/Java/Cav ity/Cavstabe.htm Stability diagram applet Stable cavities L g1 1 R1 0 g1 g 2 1 Laser stability criterion Geometrical interpretation of L L 0 1 1 1 R1 R2 A cavity is stable if the segments between the mirrors and their centers of curvature partially overlap. (One cannot lie entirely within the other) Laser stability criterion For mirrors Ro and 2Ro, the cavity will be stable if L is ____ a) b) c) d) e) 0 …Ro Ro …2Ro Ro …3Ro 2Ro …3Ro two of the above Laser stability criterion If a diverging mirror (-Ro) is used and a converging one (2Ro) find all allowable L’s a) b) c) d) e) 0 …Ro Ro …2Ro Ro …3Ro 2Ro …3Ro two of the above Converging thin lens/mirror imaging review Converging thin lens/mirror imaging review Diverging thin lens/mirror imaging review "The picture shows a spherical mirror, resting on [my] left hand… Such a globe reflection collects almost one's whole surroundings in one diskshaped image. the whole room, four walls, the floor, and the ceiling, everything, albeit distorted, is compressed into that one small circle. Your own head, or more exactly the point between your eyes, is the absolute center. No matter how you turn or twist yourself, you can't get out of that central point. You are immovably the focus, the unshakable core, of your world." - M. C. Escher Diverging thin lens/mirror imaging review