A Least Squares Regression Realised Covariation Estimation: A Comprehensive Simulation Study
advertisement

A Least Squares Regression Realised Covariation Estimation:
A Comprehensive Simulation Study
∗
Ingmar Nolte†
Michalis Vasios‡
Valeri Voev§
University of Warwick,
University of Warwick
Aarhus University
CREATES
PRELIMINARY VERSION. DO NOT CITE.
August 27, 2012
JEL classification: C13, C22, G10
Keywords: High Frequency Data, Subsampling, Realized Volatility, Market Microstructure
∗
We would like to thank Peter Hansen, Asger Lunde, Mark Podolskij, Almut Veraart, Kevin Sheppard and
Ilze Kalnina for helpful discussions. All remaining errors are ours.
†
University of Warwick, Finance Group, Coventry, CV4 7AL, United Kingdom. Phone +44-24765-72838,
Fax -23779, email: Ingmar.Nolte@wbs.ac.uk. The work has been supported in part by the European Community’s Human Potential Program under contract HPRN-CT-2002-00232, Microstructure of Financial Markets
in Europe; and by the Fritz Thyssen Foundation through the project ’Dealer-Behavior and Price-Dynamics on
the Foreign Exchange Market’.
‡
University of Warwick, CV4 7AL, Coventry, UK. Phone +44 7942 468 063, email:
michalis.vasios.09@mail.wbs.ac.uk.
§
School of Economics and Management, Aarhus University, 8000 Aarhus C, Denmark. Phone +45-8942-1539,
email: vvoev@creates.au.dk. Financial support by the Center for Research in Econometric Analysis of Time
Series, CREATES, funded by the Danish National Research Foundation, is gratefully acknowledged.
Abstract
In this paper we provide a simple framework for the estimation of the whole variancecovariance matrix in the presence of MMS noise and non-synchronous trading. To accomplish that we start from the formula of the realized variance and the Hayashi-Yoshida realized covariance estimator and derive two separate pooled OLS regressions whose byproducts are the intergrated variance and covariance, respectively. An empirically motivated
simulation study shows that the least square approach gives rise to very precise estimators
for all elements of the covariation matrix and outperforms other widely applied estimation
techniques.
1
Introduction
In recent years, the increasing availability of intraday data has triggered the development of high
frequency techniques on the estimation of the variance-covariance matrix of price processes. In
an environment where price processes can be observed directly, i.e. without measurement error,
the elements of the variance-covariance matrix can be estimated simply and consistently by the
realized variance which is the sum of the squares of the high-frequency returns within a given day
(e.g. Andersen, Bollerslev, Diebold & Labys (2001) and Barndorff-Nielsen & Shephard (2002))
and the realized covariance which is the sum of the cross-products of high-frequency returns
(e.g. Barndorff-Nielsen & Shephard (2004)). A number of issues arise for these estimators when
used in practice. Firstly, the presence of market microstructure noise (MMS) leads to biases
and inconsistency. Secondly, in the covariance estimation case when the separate univariate
processes are not observed simultaneously, one has to resort to synchronization techniques in
order to define joint observation times for the multivariate process. Such techniques lead to
strong bias towards zero in the estimated covariances, known as the Epps effect (Epps (1979)).
Different approaches have been proposed to make these estimators robust to the MMS,
such as the calculation of optimal sampling frequencies, kernel based lead-lag corrections, and
pre-averaging methods. For instance, concerning the variance estimation, recent advances include the two-scale realized variance in Zhang, Mykland & Aı̈t-Sahalia (2005), the multi-scale
realized variance of Zhang (2006), the nonparametric realized kernels of Barndorff-Nielsen,
Hansen, Lunde & Shephard (2008a), the pre-averaging approach of Jacod, Li, Mykland, Podolskij & Vetter (2009), and the quantile-based realised variance in Christensen, Oomen & Podolskij (2010). With respect to the covariance estimation Hayashi & Yoshida (2005) and Corsi &
Audrino (2007) propose an estimator which does not require synchronization of observations
and thus accounts for the Epps effect. Griffin & Oomen (2006) study the properties of this estimator under i.i.d. noise, while Voev & Lunde (2007) propose extensions to the Hayashi-Yoshida
estimator to make it robust to market microstructure frictions of a general nature. Other multivariate techniques include the realized covariances in Zhang (2011), Griffin & Oomen (2006)
and Martens (2004), among others. A more unified approach for the estimation of both variance and covariance under non-synchronous trading and MMS noise is the Parzen type realized
kernel in Barndorff-Nielsen, Hansen, Lunde & Shephard (2011), as well as the flat-top realized
kernel in Varneskov (2011).
The aim of this paper is to provide a simple framework for the estimation of the whole
variance and covariance matrix in the presence of MMS noise and non-synchronous trading. To
accomplish that we build on the integrated variance estimation approach developed in Nolte
& Voev (2012) and propose its multivariate version. The key idea of our estimation tech-
1
nique relies on the observation that, for example for the variance case, by defining the realized
variance as a function of the number of returns and after few transformations, we can derive
a pooled OLS regression which gives a consistent estimation of the intergrated variance as a
byproduct. Similarly for the covariance case, we start from the Hayashi-Yoshida realized covariance estimator to derive a second pooled OLS regression, the constant element of which is
an estimation of the intergrated covariance of two price processes. Although we estimate the
elements of the covariation matrix separately, we use the same least square regression based
technique both for the variances and the covariances, thus proposing a unified approach; the
OLS variance-covariance estimation.
A comprehensive simulation study investigates the finite-sample properties of our estimation approach against widely applied estimation techniques of the elements of realized covariation, namely the estimator proposed by Hayashi & Yoshida (2005) along with its subsampled
version proposed by Voev & Lunde (2007), the Parzen type realized kernel in Barndorff-Nielsen,
Hansen, Lunde & Shephard (2009) and Barndorff-Nielsen et al. (2011), and the flat-top realized kernel in Varneskov (2011). To add complexity in our analysis we allow the MMS noise
component to be not only iid, but also serially dependent (either AR(1) or MA(1)) as well as
correlated with the price process. An important element of our analysis is the assessment of the
performance of the competing estimation methods in the presence of non-synchronous trading
activity. To accomplish that we build 3,600 scenarios by varying the sampling frequency of
two univariate price processes, which allows us to assess the behavior of the different sampling
schemes suggested in the relevant literature.
The results of the simulation study show that the OLS estimator is a very precise estimator
both in the univariate and the multivariate case. It is the best estimator in root mean squared
error terms compared to the alternative integrated variance techniques, and second only to the
subsampled HY in the multivariate case, although it comfortably outperforms the realized kernel
based estimators. A nice feature of our estimator is that it has relatively stable performance
across different non-synchronous trading scenarios, different type of MMS noise components
and in both the univariate and multivariate case. Overall, the simplicity and efficiency of our
proposed estimation approach makes it a strong condidate for the estimation of all elements of
the variance covariance matrix in empirical application.
The paper is structured as follows: in Section 2 we introduce the notation and the theoretical framework we are working under, Section 3 presents our estimation methodology, Section
4 describes the simulation design and presents the results of a simulation study in which we
compare our approach to other existing approaches, and Section 5 concludes. The Appendix
contains detailed results of the simulation study.
2
2
Setup and Notation
We assume that we have irregularly spaced, non-synchronous observations of an n-dimensional
continuous time log price process pt , t ≥ 0, which is a noisy signal for an underlying process
p∗t :
pt = p∗t + ut ,
where ut is the noise term. The elements of p, p∗ and u are denoted by pk , p∗k and uk , for
k = 1, . . . , n, respectively. We follow Barndorff-Nielsen & Shephard (2004) and assume that
the process p∗t satisfies the following assumptions:
Assumption 1. The process p∗t is a multivariate martingale process with stochastic volatility
satisfying
Zt
p∗t = Θu dWu
0
where Θ is the spot covolatility process and W is a vector standard Brownian motion of dimension m. All the elements of Θt are cádlág.
Defining the spot covariance as Σt = Θt Θ′t , the integrated covariation process of p∗ is
given by
Zt
ICt = Σu du,
0
where the diagonal elements of Σt are assumed to be integrable.
Our aim is to estimate the increment of integrated covariance
IC(a, b) =
Zb
Σu du = ICb − ICa .
a
for some predetermined choice of (a, b), e.g., a trading day. Henceforth, we assume that the
period of interest is a trading day with a = 0 and b = 1, and we will omit a and b in the
notation. We make the following assumption for the market microstructure noise process:
Assumption 2.
(i) p∗s ⊥⊥ ut , for all s and t; (Exogeneity)
(ii) E [ut ] = 0 for all t;
Under this assumption the noise process can be dependent, but is exogenous to the true
price process p∗ . A question that arises at this point is how to define a meaningful dependence
3
structure for a multivariate asynchronously observed process. Recently, Barndorff-Nielsen,
Hansen, Lunde & Shephard (2008b) utilized a sampling scheme for multivariate asynchronously
observed processes which relies on a synchronization procedure they refer to as “refresh time”
which we will denote by t̃. Refresh time is constructed by first selecting the time at which the
slowest asset has traded. The next time is recorded after all assets have traded at least once and
so on. All assets’s prices are then last-tick interpolated to the refresh times. While it allows for
synchronizing the price processes, a drawback of this scheme is that the refresh times depend
on the set of assets and therefore are endogenous.
We, instead, suggest to define the time scale as multiples of the smallest time increment at
which the data is available, usually a second. In this way it is exogenous of the set of assets and
adapts to the resolution of the data. Defining dependence on this time scale is then standard.
We refer to this type of dependence as “clock time” dependence and denote it by τ . Stock data
on the NYSE is recorded on a minimum time resolution of 1 second and a trading day lasts
from 9.30 to 16.00 (6.5 hours =
b 23400 seconds) which implies that in this case τ = 1, . . . , 23400.
Thus, we complete Assumption 2 and postulate dependence of the noise process in clock time
as follows
Assumption 2. (continued)
(iii) The noise process u is covariance stationary with autocovariance function given by Γ(q) =
E [uτ u′ τ −q ], (Dependence)
where q is naturally measured in clock time. The (k, l)-element of Γ(q), k, l = 1, . . . , n is denoted
by γk,l (q).
It should be noted that clock time is different from calendar time since it is affected
by time resolution of the data. In cases where the smallest time increment in the data is a
second, Γ(q) is a q-second autocovariance, while if the smallest time increment in the data is
a millisecond, it would be a q-millisecond autocovariance. Thus, depending on the size of the
time increment fineness, both correspond to different intervals of physical time. Using clock
time to define dependence of the MMS noise process has the nice feature that it adapts to
the frequency at which the noise operates and thus has some of the advantages of tick-time
dependence. Moreover, our time scale is invariable to the set of assets and thus avoids the
endogeneity of refresh time scale. As high frequency data arrives asynchronously across the
assets, we will use τjk , j = 1, . . . , N k to denote the time of the j-th data point of the k-th asset,
where N k is the total
number
of events for asset k = 1, . . . , n. Under Assumption 2, we thus
have, e.g., that E ukτk ulτ l
j
j′
= γk,l(q), whenever τjk − τjl′ = q.
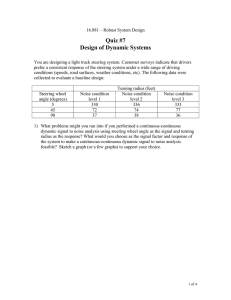
Figure 1 illustrates the difference between refresh time scale and clock time scale and
accentuates the disadvantages of the former. We consider two sets of three stocks, say {A, B, C}
4
and {A, B, D}, and show that the covariance structure of the noise between A and B is different
depending on whether the third stock is C or D if we use refresh time scale, while it remains
unchanged under clock time.
Case 1:
A
A
τ
s1
A
τ
s2
B
C
τ
s5 -
B
τ τ τ
s 2s 3s 4
C C
τ τ
s 6s 7
C
t̃2
A
B B
τ
s5
τ τ
s 2s 3
t̃1
A
τ
s4
B B B
τ
s1
τ
s1
A
τ
s3
-
B
-
C
C C
τ
s4
τ τ
s 5s 6
t̃3
t̃4
t̃5
Case 2:
A
A
τ
s1
A
τ
s2
B
B B B
τ
s1
D
A
τ
s3
τ τ τ
s 2s 3s 4
B
A
B B
τ τ
s 6s 7
-
B
-
D
D D
τ τ
s 2s 3
t̃1
τ
s5 -
τ
s5
D D
τ
s1
A
τ
s4
τ τ
s 4s 5
t̃2
t̃3
t̃4
Figure 1: Illustration of refresh time (t̃) and clock time (τ ) scales.
Assume that τ4A −τ2B = q and let us consider the unconditional covariance Cov[uA
, uB
] in
τ4A
τ2B
A
B
both cases. In clock time it is immediately clear that in both cases we have that Cov[uτ A , uτ B ] =
4
2
B
A
γA,B (q). In refresh time, however, we have Cov[uA
,
u
]
=
γ
(2)
in
Case
1,
while
Cov[u
,
uB
]=
A
B
A
A,B
τ4
τ2
τ4
τ2B
C
γA,B (1) in Case 2. This results from process D not having generated an observation at time τ4
which changes the refresh time scale in such a way that a second-order lag becomes a first-order
lag. Furthermore, the refresh time scale induces loss of information due to non-synchronicity
and last-tick interpolation. In case 2, refresh time only preserves 12 out of 17 observations. It
should of course be emphasized again that refresh time scale has the virtue of synchronizing
the observations and thus opens the possibility of ensuring positive definiteness of covariance
matrices based on sums of outer products of return vectors and considerably easing estimation
in very large dimensional systems.
In clock time, we are able to keep all observations and ensure invariability of the time
scale with respect to the set of assets, but we loose the possibility of vectorizing returns, which
leaves us with the need to estimate covariances pair-by-pair. In this way our approach is more
efficient as it uses all data for each pair, but implies that we need to run n(n − 1)/2 separate
5
estimations, possibly losing positivity of the covariance matrix. Thus, there is a certain tradeoff in choosing one to the other. However, one could deal with the possibility of a negative
positive definite matrix, for example, by applying transformation of eigenvalues techniques and
by projecting the symmetric covariance matrix into the space of positive definite matrices.
To complete the notation we are going to use further in the paper, we need to define subgrids of the original grid of observations of a given asset k. To this end, the grid of observations
k
{τjk }j=1,...,N k is subdivided into subgrids {τjs+h
}j=0,...,Nh,s
k , where s = 1, . . . , S and h = 1, . . . , s,
which denotes the h-th subgrid for a sampling frequency of s ticks (e.g., with s = 2 we can
k
k
k
have two subgrids, the first one comprising the ticks
j k{τ1k, τ3 , τ5 , . . .} and the second – the ticks
k
{τ2k , τ4k , τ6k , . . .}). Furthermore, we define Nh,s
= N s−h . For each subgrid, we can define the
corresponding observed and efficient s-tick returns as
rτkjs+h = pkτ(j−1)s+h − pkτjs+h ,
∗k
rτ∗kjs+h = p∗k
τ(j−1)s+h − pτjs+h ,
k
j = 1, . . . , Nh,s
k
j = 1, . . . , Nh,s
,
and the noise returns as
ekτjs+h = ukτ(j−1)s+h − ukτjs+h ,
3
3.1
k
j = 1, . . . , Nh,s
.
Estimation Procedures
Variance Estimation
Least squares estimation of integrated variance is addressed in detail in Nolte & Voev (2012).
Here, we briefly present the essence of the estimation procedure. A key step is to to separate the
variance of the unobservable price process from the variance of the noise component. To accomplish that we use the idea of the volatility signature plot introduced by Andersen et al. (2001),
which is the graphical representation of the realized variance against the sampling frequency
at which it was computed. The volatility signature plot depicts the relationship between the
realized variance computed with returns sampled on a certain grid and the number of sampling
points on the grid for a set of predetermined grids. To gain an intuitive understanding for our
estimation procedure, consider the i.i.d. noise case, under which theoretically the noise variance
accumulates linearly with the number of sampling points, whereas the integrated variance is
constant. Thus, an estimate of the integrated variance can simply be obtained as the intercept
of the regression of the realized variances on the number of sampling points on the grid. Under
a more general specification of the noise process, as in Assumption 2, the realized variances
are further affected by the noise autocorrelations, which have to be taken into account in the
6
regression by including appropriate additional regressors.
More formally, consider a given asset k with N k observations (ticks, transactions, quote
updates) within the period of interest. To this end, the grid of observations {tkj }j=1,...,N k is
subdivided into subgrids {tkjs+h }j=0,...,j N k −h k , where s = 1, . . . , S and h = 1, . . . , s, which denotes
s
the h-th subgrid for a sampling frequency of s ticks (e.g., with s = 2 we can have two subgrids,
the first one comprising the ticks {tk1 , tk3 , tk5 , . . .} and the second – the ticks {tk2 , tk4 , tk6 , . . .}). For
each subgrid, we can define the corresponding observed and efficient s-tick returns as
rtkjs+h
=
pkt(j−1)s+h
−
Nk − h
j = 1, . . . ,
s
k
N −h
,
j = 1, . . . ,
s
pktjs+h ,
∗k
rt∗kjs+h = p∗k
t(j−1)s+h − ptjs+h ,
and the noise returns as
ektjs+h
=
ukt(j−1)s+h
−
uktjs+h ,
Nk − h
j = 1, . . . ,
.
s
j k k
k
= N s−h − 1. The realized
Denote the number of returns for the h-th s-subgrid as Nh,s
variance of asset k based on this subgrid is defined explicitly as a function of the number of
returns on the subgrid:
k
Nh,s
k
RV k (Nh,s
)=
2
X
rtkjs+h .
j=1
To estimate the integrated variance we will exploit the following relationship, which holds
under Assumptions 1 and 2:
Nk
h,s
h
i
X
k
E RV k (Nh,s
) = IVk +
Var ektjs+h
j=1
∞
X
= IVk + 2
q=1
k
≈ IV +
k
Nh,s
(q) (γk,k (0) − γk,k (q))
k
2Nh,s
γk,k (0)
−2
Q
X
k
Nh,s
(q)γk,k (q),
(1)
q=1
where IVk is the integrated variance of the true price process of asset k, i.e. element (k, k) of
P k
k
k
the matrix IC and Nh,s
= q Nh,s
(q). Thereby, Nh,s
(q) counts the number of q-second returns
7
of asset k for the (h, s)-subgrid given by
k
Nh,s
(q) =
X
1l {tk
k
js+h −t(j−1)s+h =q}
.
j
Note, that these counts need to be considered because we work with irregularly-spaced returns,
which under the assumption of an autocovariance
h
ifunction defined on the smallest regular
time grid (each second), imply that each Var ektjs+h depends on the length of the return and
thus consists of two elements, namely γk,k (0) and the q-second autocovariance γk,k (q). The
approximation in Equation (1) results from truncating the autocorrelation function at lag Q.
This is reasonable, since for a covariance stationary process the autocovariance function tends
to zero for large lags, so that Q has to be chosen appropriately. As we will see below, letting
Q be too large leads to more estimation noise, because for large Q’s there are relatively few
P k
k
k
counts Nh,s
(Q). Furthermore, since Nh,s
= q Nh,s
(q), choosing Q too large yields a singular
regressor matrix.
Under the assumption of an i.i.d. noise process we obtain from Equation (1) the standard
result (as in e.g., Hansen & Lunde (2006)):
k
k
E RV k (Nh,s
) = IVk + 2Nh,s
γk,k (0).
Equation (1) differs to the extent that we have to consider the q-th order autocorrelation of the
noise process and we have to count the number of occurrences.
On the basis of the theoretical relationship in Equation (1) and the above assumptions,
we can easily derive the corresponding pooled OLS regression
yh,s = c + β ′ xh,s + εh,s ,
s = 1, . . . , S,
h = 1, . . . , s
(2)
k
where yh,s
=
RV k (Nh,s
) and xh,s is the Q-dimensional vector given by
k
k
k
xh,s = (Nh,s
, Nh,s
(1), . . . , Nh,s
(Q))′ . In practice, Q has to be chosen appropriately, to reflect
the degree of persistence of the noise process in the particular application.
k
In the above regression, one simply regresses the realized variances on Nh,s
and the qk
counts Nh,s
(q). The estimated constant ĉ is an estimate of the integrated variance IVk , while
β̂0 , β̂1 , . . . , β̂Q are estimates of 2γk,k (0), −2γk,k (1), . . . , −2γk,k (Q). Hence, as a byproduct of
this estimation we can obtain the autocovariance function of the noise process, which can be
identified under the assumption that the autocovariance γk,k (Q) vanishes for a large enough Q.
For a particular application, one could choose Q in an iterative manner starting from a relatively
small value which is increased in each step. The optimal value of Q is the smallest value at
which a given criterion (e.g. the gradient of the estimates) no longer changes considerably.
8
3.2
Covariance Estimation
Covariance estimation based on high-frequency data is inherently more challenging than variance estimation, since there is the additional complication of non-synchronicity. As mentioned
already, non-synchronicity poses the problem of defining common event times for multiple assets. Typically, last-tick interpolation is employed, in which the last recorded price before a
pre-defined observation time is taken as the observed price at that point of time. This leads to
a bias towards zero in the estimated realized covariance as the sampling frequency increases. A
solution to this problem is proposed by Hayashi & Yoshida (2005). Considering two assets k
and l, the Hayashi-Yoshida (HY) estimator based on all observations is defined as
k
HY
k,l
=
l
N X
N
X
j=1
rtkk rtll ′ 1l {(tkj−1 ,tkj ]∩(tl ′
j
j ′ =1
,tl ]}
j −1 j ′
j
.
As can be seen from the definition, this estimator sums all cross products of overlapping returns
of the assets under consideration. We can also base the estimation on the (h, s)- subgrid of
asset k in combination with the (h′ , s′)-subgrid of asset l, which we denote by
k Nl
Nh,s
h′ ,s′
HY k,l (h, s, h′ , s′ ) =
X X
j=1
j ′ =1
rtkk
js+h
rtll
j ′ s′ +h′
1l {(tk
(j−1)s+h
,tkjs+h ]∩(tl(j ′ −1)s′ +h′ ,tlj ′ s′ +h′ ]} .
(3)
In practice, it is convenient to implement this estimator by picking one of the assets, say
k, and determining for each of its tick returns rtkk , the corresponding return of the other asset
js+h
which envelops it, i.e. starts before or at tk(j−1)s+h and spans over at least to tkjs+h . Of course,
if one interchanges the assets, the estimator is numerically identical, but with respect to speed
of execution, we recommend using the slower trading asset to determine the corresponding
enveloping returns of the faster asset. In the following exposition we set the slower asset to
be asset k. While the HY estimator is defined using all returns of both assets, effectively,
k
there are at most min(Nh,s
, Nhl ′ ,s′ ) different pairs of returns which contribute to the sum. This
arises, because two or more neighboring returns of asset k may happen to be enveloped by the
same return of asset l. Due to the summability of log returns, this effectively amounts to only
one return pair in the sum of the HY estimator and the noise contaminations cancel against
each other. Thus, the amount of noise which accumulates in the sum is a function of such
effective pairs, while some of the ticks tkjs+h play no role and are hence irrelevant. In order to
determine the number of effective pairs, we introduce the right- and left-continuous counting
k
k
PNh,s
PNh,s
k
k
functions Nh,s
(t) = j=1
1l {tk ≤t} and N̆h,s
(t)
=
1l {tk <t} , k = 1, . . . , n, s = 1, . . . , S,
j=1
js+h
js+h
9
where rtll
j′
:tli′
denotes the (possibly multiple-tick) return of asset l over the interval (tlj ′ , tli′ ), and
the t̃kjs+h ’s denote the relevant ticks of asset k on the (h, s)-subgrid, i.e., the set of all (h, s)-ticks
minus the set of ticks fulfilling the condition in equation (4).
Each pair rt̃kk rtll
can be decomposed as
:tl
js+h
N l ′ ′ (t̃k
N̆ l ′ ′ (t̃k
+1
)
)
js+h
(j−1)s+h
h ,s
h ,s
rt̃kk
js+h
rtll
(
N l ′ ′ t̃k
(j−1)s+h
h ,s
)
:tl
(
)
N̆ l ′ ′ t̃k
+1
js+h
h ,s
= rt̃∗kk rt∗ll
js+h
+ekt̃k
js+h
(
N l ′ ′ t̃k
(j−1)s+h
h ,s
eltl
(
)
:tl
N l ′ ′ t̃k
(j−1)s+h
h ,s
(
)
N̆ l ′ ′ t̃k
+1
js+h
h ,s
)
:tl
(
)
.
(5)
N̆ l ′ ′ t̃k
+1
js+h
h ,s
The first product on the right-hand side of equation (5) contributes to the estimation of the
integrated covariance, which we would like to measure. The second one is due to noise and we
examine it further:
!
ekt̃k eltl
= ukt̃k − ukt̃k
ult l
− ultl
:tl
k
js+h
js+h
(j−1)s+h
N̆
t̃
+1
l
k
l
k
N ′ ′ (t̃
N̆ ′ ′ (t̃
+1
N l ′ ′ (t̃k
h′ ,s′ ( js+h )
js+h )
(j−1)s+h )
(j−1)s+h )
h ,s
h ,s
←−
−→
L99
99Kh ,s
= γk,l q + γk,l q − γk,l q − γk,l q ,
where
←−
q
−→
= t̃k(j−1)s+h − tl
Nhl ′ ,s′ t̃k(j−1)s+h
q
= t̃kjs+h − tN̆ l ′ ′ (t̃k )+1
js+h
h ,s
L99
= t̃kjs+h − tl
q
99K
q
Nhl ′ ,s′ t̃k(j−1)s+h
= t̃k(j−1)s+h − tN̆ l ′ ′ (t̃k )+1
js+h
h ,s
are the time spans in seconds between the four returns’ endpoints and therefore the crosscorrelation orders in the autocorrelation function γk,l (q).
11
where yh,s,h′,s′ = HY k,l (h, s, h′ , s′ ) and xh,s,h′,s′ is the (2Q + 1)-dimensional vector given by
k
k
k
k
k
′
xh,s = (Nh,s,h
′ ,s′ (−Q), Nh,s,h′ ,s′ (−Q + 1), . . . , Nh,s,h′ ,s′ (0), . . . , Nh,s,h′ ,s′ (Q − 1), Nh,s,h′ ,s′ (Q)) , and
Q is chosen suitably.
4
Simulation Study
In this section, we resort to Monte Carlo simulations to compare the finite-sample performance
of our estimation approach against other widely applied estimation techniques, namely the
estimator (HY) proposed by Hayashi & Yoshida (2005) along with its subsampled version (HYS)
proposed by Voev & Lunde (2007), the Parzen type realized kernel (UK, for the univariate and
MK, for the multivariate version) of Barndorff-Nielsen et al. (2009) and Barndorff-Nielsen et al.
(2011), and the flat-top realized kernel (FTRK) of Varneskov (2011). The first two techniques
estimate the integrated covariance (V12), the univariate Parzen kernel estimates the variances
of the two price processes (V1 and V2), while the last two techniques estimate all elements of
the covariation (V1, V2, and V12). Our estimators are the estimated constants in the OLS
regressions in equations 2 and 6 for the integrated variance and covariance, respectively. The
performance is measured in terms of the bias and the root mean squared error (RMSE) against
the true value of V1, V2, and V12.
4.1
Simulation Design
The simulation design follows the approach in Barndorff-Nielsen et al. (2011). Specifically, we
simulate over the interval t ∈ [0, 1], which corresponds to 6.5 hours of second-by-second trading
activity and a number N = 23, 400 of intervals. The simulations are performed using 1,000
replications. The efficient price process is given by the following bivariate stochastic volatility
model:
p
dp∗j,t = µdt + ρσj,t dWj,t + 1 − ρ2 σj,t dBt , p∗j,0 = 0
σj,t = exp(β0 + β1 vt ),
dvj,t = αvj,tdt + dWj,t ,
for j = 1, 2,
where dW1 , dW2 and dB are standard independent Brownian motions. In this setup, the
second term of the price process is an idiosyncratic factor, while the third term is a common
factor, whose strength is determined by the squared root of the correlation between p∗1 and
p
p∗2 , i.e. by 1 − ρ2 . There is a perfect correlation (leverage) between the innovations of the
idiosyncratic factor and σj , i.e. corr(ρσj dWj , σj ) = 1, while the leverage between the efficient
price process and vj is ρ.
13
The parametrization is also as in Barndorff-Nielsen et al. (2011). We set µ = 0.03,
hR β1 = i
1 2
2
0.125, α = −0.025, ρ = −0.3 and β0 = β1 /2α, which is a normalization ensuring that E 0 σj,u
du =
1. To initiate the process vj each day we use its stationary distribution, vj,0 ∼ N(0, (−2a)−1 ).
To generate the bivariate noise process, uj , we start with an i.i.d. specification,
v
u
N
u
X
2
2
2 t −1
4
Noise 1: υj ∼ N(0, ωj ) with ωj = ξ
N
.
σj,i
i=1
This specification means that the variance of the noise moves together with the spot volatility
of the efficient price process. We assign two values to the noise-to-signal ratio 0.001 (low noise
regime), and 0.01 (high noise regime). To pose an additional challenge we also consider three
specifications, which allow for serial dependence (AR(1) and MA(1)) in the noise and correlation
between the noise and the efficient price process.
Noise 2: υ̃j,t = φj υ̃j,t−1 + υj,t for φ1 = −0.5 and φ2 = −0.2.
Noise 3: υ̃j,t = υj,t + θj υj,t−1 for θ1 = −0.7 and θ2 = −0.4.
Noise 4: υ̃j,t = φj,0(p∗j,t − p∗j,t−1 ) + φj,1 (p∗j,t−1 − p∗j,t−2 ) + ϋj,t,
√
√
for φj,0 = −0.6 ωj , φj,1 = −0.3 ωj , ϋ1,t ∼ Noise 2 with φ = 0.3 and ϋ2,t ∼ Noise 3 with
θ = 0.5.
To obtain different scenaria in terms of trading activity we generate random Poisson
sampling times with constant intensities η1 and η2 for asset 1 and 2, respectively. This allows
us to study the impact of non-synchronous trading and assess the two synchronization schemes,
refresh time versus tick time. We consider 3,600 scenarios for each noise model by varying 1/η1
and 1/η2 from 1 to 60. For example, the pair (1/η1 ,1/η2 )=(1/λ1,1/λ2 )=(10,60) means that on
average p∗1 and p∗2 is observed every 10 and 60 seconds, respectively.
4.2
Practical Issues
In our approach there are two parameters that need to be chosen: Q - the number of lags for
the (cross) autocovariance function of the noise processes, and S - the number of subsamples.
To choose S in the univariate case we rely on results derived in Nolte & Voev (2012), who
provide the theoretical foundations1 of how to choose S in the i.i.d. noise case. We denote
this S as S ∗ and we use it as an indication of how to choose S for all noise models in both the
1
))
,
Briefly, optimal S is given by S ∗ = α∗ N β−1 , where N is the number of intraday prices, β = 32 1 − ln(ln(N
ln(N )
q
2
33.75ω 4 (π 2 −4(γ0 +2γ1 ))
and α∗ = 3
. Intuitively, α∗ is a noise-to-signal ratio and resembles to a similar quantity
IQ
which determines the length of the bandwidth in the realized kernel approach.
14
univariate and multivariate estimation. The choice of Q should be data-driven as it depends on
the serial dependence of the noise process. In practise we start with a “base scenario”, which
sets S = S ∗ and Q = 5. Then, we perform a sensitivity analysis2 to test whether our results
can be further improved by selecting different values of S and Q. The values that minimize
the RMSE in each case consist our “optimal scenario”. Specifically, the optimal scenario for
the univariate estimation is S = S ∗ and Q = 0 for the i.i.d. noise model and Q = 2 for the
2 dependant noise cases. The optimal scenario for the multivariate estimation is S = S ∗ and
Q = 0 across all noise models.
Although the aforementioned sensitivity analysis is difficult to be implemented in a nonsimulation based exercise, it provides insightful findings on how to choose S and Q in practise.
First, in the univariate case a larger Q than 0 (up to 5) might be beneficial when noise exhibits
higher dependence, especially for assets with very active trading activity. On the contrary, a
larger Q seems to increase the RMSE in the covariance estimation. A higher S may further
improve the estimation precision when the trading frequency of the price processes is low. In
our sensitivity analysis this occurs in the region of λ1 , λ2 > 50 mainly for the i.i.d. noise case.
Values higher than S = 1.5S ∗ do not improve the estimation precision.
A few remarks on the implementation of the competing estimators are required. The multivariate Parzen kernel is implemented in the spirit of Barndorff-Nielsen et al. (2011). Specifically, we use a refresh time synchronization scheme, with Parzen weights, and with bandwidth
H = 3.51n3/5 meanj=1,...,d(φ2j /RVj,1/900 )2/5 .The nominator inside the parenthesis approximates
the spot variance and is obtained by averaging over subsampled realized variances computed at
60-second grid and dividing by twice the number of returns. The denominator is the realized
variance estimator based on 20 min subsampling returns, an approximation for the squared root
of the integrated quarticity. To calculate the flat-top realized kernel we follow the recommendations of Varneskov (2011). We use the refresh time sampling scheme, with a Tukey-Hanning
type kernel function and tuning parameters c = H −1/2 and b = 2. The parameter c controls the
flat-top region of the weighting function. Finally, we adopt all Varneskov (2011) suggestions for
the calculation of the bandwidth.
4.3
Simulation Results
In this subsection we present the bias and the RMSE of the competing estimators for all elements
(when applicable) of the covariation and for many scenaria of trading activity. To conserve space
we present results only for the first three noise models, i.e. the i.i.d., AR(1) and MA(1) cases,
and the high noise-to-signal ratio, i.e. ξ 2 = 0.01, which previous literature suggests that it is
2
We do not report these result to save space. However, they are available upon request.
15
the most relevant choice from a practical viewpoint. In Tables 1-18 (Appendix), we present
60 scenaria per estimator/noise model by sampling price process 1 every 5, 15, 30, 45 and 60
seconds and price process 2 every 5, 10, 15, 20, 25, 30, 35, 40, 45, 50, 55 and 60 seconds.
To start with, we observe some general trends in the results. Firstly, in the multivariate
case all estimators are mostly negatively biased with only few sign alterations, while in the
univariate case there is a mixed picture: On the one hand, the bias of our estimator remains
negative, on the other hand for both realized kernel estimators bias turns positive. Secondly, it
seems that, in terms of the bias, the performance of the OLS and the realized kernel estimators
are more stable as we move from the i.i.d. noise case to the dependant noise cases compared
to the that of HY and HYS. However, if we turn our interest to the RMSE all models perform
better in the i.i.d. case, as expected. Thirdly, although unreported, the bias and the RMSE
are higher for the high noise regime (ξ 2 = 0.01) than the low noise regime (ξ 2 = 0.001); higher
noise adds additional challenge to all estimators. Finally, it seems that the OLS estimator is
not too sensitive to the choice of the tuning parameters Q and S, which is a desirable feature.
To get a better insight into the performance of the covariation estimators we report3 in
Graphs 1-18 (Appendix) the bias and the RMSE of all estimators and for the first three noise
models across 3,600 non-synchronous trading scenaria, which are constructed by varying the
sampling frequency of both prices processes from 1 to 60 seconds. The key message from Tables
1-18 and Graphs 1-18 is that the OLS estimator is a very precise estimator both in the univariate
and the multivariate case. It is the best estimator in terms of the RMSE in the univariate case
and second only to the HYS in the multivariate case, although even in the latter case the OLS
estimator outperforms in the region of very frequent trading activity, i.e. when λ1 and λ2 are
close to 1.
In the covariance estimation4 , the two realized kernel estimators, the MK and FTRK,
have a very similar behavior: they perform well when the two price processes have the same
sample frequency (i.e., as we move diagonally from (λ1 , λ2 ) = (1, 1) to (λ1 , λ2 ) = (60, 60)), but
their RMSE increases dramatically when the two price processes are sampled unevenly. This
type of bias is less severe for the FTRK. Although the OLS estimator has a similar pattern,
it definitely outperforms both realized kernel estimators, with the only exception being when
compared to the FTRK and for λ1 , λ2 ≤ 2. In all other cases (to be more precise, in approx.
90% of these), the OLS estimator performs better. Furthermore, the OLS estimator performs
universally better than the HY across all noise models. The underperformance of the HY is
particularly high for λ1 , λ2 < 10, when trading activity is very frequent; in this regeion the
3
For the OLS estimator, we use the optimal Q and S scenario to construct the graphs. The shape of the graphs
or the ranking of the competing estimators do not change if instead we use the base scenario.
4
See Tables 1-2 and Graphs 1-2 for the i.i.d. noise case, Tables 7-8 and Graphs 7-8 for AR(1) noise case and
finally Tables 13-14 and Graphs 13-14 for the MA(1) noise case.
16
RMSE spikes. The best estimator in the multivariate case is the the subsampled HY, a result
driven merely from its lower variance compared to the OLS estimator, as their distance in bias
terms is smaller. However, when both processes are sampled at the highest possible frequencies
(λ1 , λ2 < 5) the OLS estimator wins the race.
In the variance estimation5 , the message is clear: The OLS estimator performs better
against all competitors. An interesting finding, is the performance difference of the Parzen
kernel between its univariate and multivariate version. The MK estimator suffers from the
same type of bias as the covariance estimator does, when the price processes are sampled at
different frequencies. This is not the case for the univariate Parzen kernel. One explanation
may be the refresh time synchronization scheme applied to the multivariate case. As we know,
refresh time is dominated by the least liquid asset making variance estimation depending on
the trading frequency of both assets. Thus, the sampling frequency of process 1 is endogenous
to the variance estimation of process 2. On the contrary, the univariate Parzen kernel and the
OLS variance estimator make use of all available data, thus the variance estimation of each
asset is independent of how liquid the second asset is. As discussed in Section 2, a possibly
drawback of the separate estimation of the elements of the variance covariance matrix is the
loss of positivity of the covariance matrix. Although we acknowledge this possibility, we had
very few cases of a non positive definite estimates in our simulation exercise, indicating that it
should not pose much of concern.
5
Conclusion
The purpose of this paper is to provide a framework for the estimation of the whole variance
and covariance matrix. To accomplish that we build on the integrated variance estimation
approach developed in Nolte & Voev (2012) and propose its multivariate version. Although
we estimate the elements of the covariation matrix separately, we use the same least square
regression based technique both for the variances and the covariances, thus proposing a unified
framework. Moreover we take into account the unique features of each element and the accompanied challenges they pose, for example the non-synchronous trading issue that arises in the
covariance estimation or the presence of the MMS noise.
To test the finite-sample properties of our estimation approach we conduct a comprehensive simulation study where we compare its performance against widely applied estimation
techniques of the elements of realized covariation. To add complexity in our analysis we allow the MMS noise component to be not only iid, but also serially dependent (either AR(1)
5
See Tables 3-6 and Graphs 3-6 for the i.i.d. noise case, Tables 9-2 and Graphs 9-12 for AR(1) noise case and
finally Tables 15-18 and Graphs 15-18 for the MA(1) noise case.
17
or MA(1)) as well as correlated with the price process. Furthermore, we construct several
sampling-frequency scenaria to capture the impact of non-synchronous trading activity, which
allow us to assess the role of the different sampling schemes suggested in the relevant literature.
The results of the simulation study show that the OLS estimator is a very precise estimator
both in the univariate and the multivariate case. It is the best estimator in root mean squared
error terms compared to the alternative integrated variance techniques, and second only to the
subsampled HY in the multivariate case, although comfortably outperforms the realized kernel
based estimators. A nice feature of our estimator is that it has relatively stable performance
across different non-synchronous trading scenaria, different type of MMS noise components and
in both the univariate and multivariate case.
18
References
Andersen, T. G., Bollerslev, T., Diebold, F. X. & Labys, P. (2001), ‘The distribution of exchange rate
volatility’, Journal of the American Statistical Association 96, 42–55.
Barndorff-Nielsen, O. E., Hansen, P., Lunde, A. & Shephard, N. (2008a), ‘Designing realized kernels to measure the ex-post variation of equity prices in the presence of noise’, Econometrica
76, 1481–1536.
Barndorff-Nielsen, O. E., Hansen, P., Lunde, A. & Shephard, N. (2008b), Multivariate realised kernels:
consistent positive semi-definite estimators of the covariation of equity prices with noise and
non-synchronous trading. CREATES Working Paper 2008-63.
Barndorff-Nielsen, O. E., Hansen, P., Lunde, A. & Shephard, N. (2009), ‘Realized kernels in practice:
Trades and quotes’, Econometrics Journal . forthcoming.
Barndorff-Nielsen, O. E., Hansen, P. R., Lunde, A. & Shephard, N. (2011), ‘Multivariate realised
kernels: Consistent positive semi-definite estimators of the covariation of equity prices with noise
and non-synchronous trading.’, Journal of Econometrics 162, 149–169.
Barndorff-Nielsen, O. E. & Shephard, N. (2002), ‘Econometric analysis of realized volatility and its
use in estimating stochastic volatility models’, Journal of the Royal Statistical Society Series B
64(2), 253–280.
Barndorff-Nielsen, O. E. & Shephard, N. (2004), ‘Econometric analysis of realised covariation: High
frequency based covariance, regression and correlation in financial economics’, Econometrica
72, 885–925.
Christensen, K., Oomen, R. & Podolskij, M. (2010), ‘Realised quantile-based estimation of the integrated variance’, Journal of Econometrics 159(1), 74–98.
Corsi, F. & Audrino, F. (2007), Realized correlation tick-by-tick. Working paper, University of Lugano.
Epps, T. (1979), ‘Comovements in stock prices in the very short run’, Journal of the American Statistical Association 74, 291–298.
Griffin, J. E. & Oomen, R. C. A. (2006), Covariance measurement in the presence of non-synchronous
trading and market microstructure noise. Working Paper, University of Warwick.
Hansen, P. R. & Lunde, A. (2006), ‘Realized variance and market microstructure noise’, Journal of
Business and Economic Statistics 24, 127–161.
Hayashi, T. & Yoshida, N. (2005), ‘On covariance estimation of non-synchronously observed diffusion
processes’, Bernoulli 11, 359–379.
19
Jacod, J., Li, Y., Mykland, P., Podolskij, M. & Vetter, M. (2009), ‘Microstructure noise in the continuous case: the pre-averaging approach’, Stochastic Processes and Their Applications 119(7), 2249–
2276.
Martens, M. (2004), Estimating unbiased and precise realized covariances. Econometric Institute,
Erasmus University Rotterdam.
Nolte, I. & Voev, V. (2012), ‘Least squares inference on integrated volatility and the relationship
between efficient prices and noise’, Journal of Business & Economic Statistics 30(1), 94–108.
Varneskov, R. (2011), ‘Flat-top realized kernel estimation of quadratic covariation with nonsynchronous and noisy asset prices’, CREATES Research Papers .
Voev, V. & Lunde, A. (2007), ‘Integrated covariance estimation using high-frequency data in the
presence of noise’, Journal of Financial Econometrics 5, 68–104.
Zhang, L. (2006), ‘Efficient estimation of stochastic volatility using noisy observations: A multi-scale
approach’, Bernoulli 12, 1019–1043.
Zhang, L. (2011), ‘Estimating covariation: Epps effect, microstructure noise’, Journal of Econometrics
160(1), 33–47.
Zhang, L., Mykland, P. A. & Aı̈t-Sahalia, Y. (2005), ‘A tale of two time scales: Determining integrated volatility with noisy high frequency data’, Journal of the American Statistical Association
100, 1394–1411.
20
A
Appendix
21
Table 1: Noise Model 1 (i.i.d.) - Covariance (V12) - BIAS.
λ25
λ210
λ215
λ220
λ225
λ230
λ235
λ240
λ245
λ250
λ255
λ260
-0.009
-0.009
-0.019
-0.016
-0.015
-0.020
-0.015
-0.017
-0.022
-0.008
-0.025
-0.014
-0.007
-0.013
-0.024
-0.021
-0.019
-0.008
-0.017
-0.016
-0.029
-0.015
-0.014
-0.014
-0.019
-0.024
-0.020
-0.018
-0.016
-0.017
-0.032
-0.017
-0.016
-0.016
-0.008
-0.023
-0.017
-0.016
-0.014
-0.007
-0.018
-0.018
-0.018
-0.014
-0.009
Panel A. OLS V12 (base scenario)
λ15
λ115
λ130
λ145
λ160
-0.007
-0.017
-0.017
-0.028
-0.020
-0.012
-0.012
-0.018
-0.013
-0.028
-0.018
-0.011
-0.008
-0.023
-0.014
Panel B. OLS V12 (optimal Q and S)
λ15
λ115
λ130
λ145
λ160
-0.007
-0.017
-0.018
-0.028
-0.019
-0.012
-0.013
-0.018
-0.012
-0.028
-0.018
-0.011
-0.009
-0.022
-0.014
-0.009
-0.009
-0.019
-0.016
-0.014
-0.021
-0.015
-0.018
-0.021
-0.010
-0.025
-0.015
-0.007
-0.014
-0.023
-0.021
-0.019
-0.010
-0.017
-0.016
-0.029
-0.015
-0.014
-0.012
-0.017
-0.023
-0.020
-0.018
-0.015
-0.017
-0.032
-0.017
-0.016
-0.017
-0.007
-0.023
-0.017
-0.017
-0.014
-0.007
-0.018
-0.017
-0.018
-0.015
-0.010
-0.005
0.024
0.011
0.027
0.006
0.049
-0.022
0.009
0.014
0.015
-0.007
0.010
0.003
-0.012
0.011
-0.008
-0.021
0.003
-0.008
-0.006
-0.035
0.010
-0.010
-0.014
-0.004
0.000
0.000
0.015
0.003
-0.007
0.030
-0.009
-0.010
-0.012
-0.009
-0.019
-0.003
-0.002
-0.012
-0.012
0.009
0.013
-0.010
-0.006
0.015
-0.001
-0.002
0.001
0.002
0.001
-0.014
-0.003
-0.005
-0.013
-0.011
-0.006
-0.009
-0.015
-0.010
-0.009
-0.017
-0.010
-0.013
-0.017
-0.007
-0.020
-0.013
-0.006
-0.009
-0.017
-0.021
-0.014
-0.010
-0.015
-0.015
-0.023
-0.012
-0.009
-0.009
-0.013
-0.018
-0.016
-0.015
-0.011
-0.012
-0.028
-0.015
-0.013
-0.015
-0.008
-0.018
-0.013
-0.014
-0.011
-0.002
-0.016
-0.013
-0.014
-0.010
-0.006
-0.007
-0.007
-0.005
-0.005
0.004
0.005
-0.008
-0.015
-0.010
-0.001
-0.005
-0.008
-0.012
-0.015
-0.005
-0.006
-0.005
-0.016
-0.014
-0.012
0.000
-0.002
-0.016
-0.023
-0.019
0.001
-0.005
-0.017
-0.014
-0.020
0.007
-0.002
-0.013
-0.017
-0.022
-0.006
-0.001
-0.011
-0.027
-0.031
0.010
0.000
-0.011
-0.022
-0.026
0.010
0.001
-0.012
-0.019
-0.039
-0.007
0.000
-0.003
-0.005
0.006
0.005
-0.004
-0.007
-0.008
0.008
-0.005
-0.004
-0.002
-0.010
0.003
-0.007
0.000
-0.006
-0.004
-0.005
-0.004
0.000
-0.002
-0.011
-0.012
-0.001
-0.005
-0.007
-0.005
-0.013
0.006
-0.001
-0.002
0.000
-0.005
-0.005
0.003
-0.004
-0.011
-0.011
0.010
0.003
-0.005
-0.004
0.003
0.012
0.003
-0.004
-0.006
-0.011
Panel C. HY V12
λ15
λ115
λ130
λ145
λ160
-0.008
-0.012
-0.019
0.008
-0.011
0.025
0.007
0.011
0.028
-0.023
Panel D. HYS V12
λ15
λ115
λ130
λ145
λ160
-0.005
-0.012
-0.017
-0.021
-0.019
-0.009
-0.011
-0.014
-0.007
-0.024
Panel E. MK V12
λ15
λ115
λ130
λ145
λ160
-0.005
-0.002
0.002
0.007
0.010
-0.003
-0.005
-0.004
0.003
0.003
Panel F. FTRK V12
λ15
λ115
λ130
λ145
λ160
-0.002
0.000
-0.001
0.006
0.010
-0.001
-0.002
-0.003
0.003
0.004
22
Table 2: Noise Model 1 (i.i.d.) - Covariance (V12) - RMSE.
λ25
λ210
λ215
λ220
λ225
λ230
λ235
λ240
λ245
λ250
λ255
λ260
0.204
0.161
0.176
0.179
0.212
0.213
0.179
0.178
0.203
0.223
0.229
0.189
0.176
0.186
0.197
0.252
0.209
0.180
0.184
0.217
0.272
0.200
0.186
0.183
0.195
0.299
0.222
0.212
0.186
0.201
0.296
0.234
0.200
0.194
0.212
0.329
0.237
0.213
0.204
0.207
Panel A. OLS V12 (base scenario)
λ15
λ115
λ130
λ145
λ160
0.114
0.156
0.219
0.259
0.320
0.133
0.151
0.177
0.220
0.252
0.156
0.156
0.177
0.200
0.231
0.195
0.158
0.177
0.220
0.223
Panel B. OLS V12 (optimal Q and S)
λ15
λ115
λ130
λ145
λ160
0.108
0.151
0.216
0.255
0.317
0.127
0.143
0.174
0.218
0.251
0.151
0.150
0.173
0.191
0.222
0.188
0.154
0.172
0.213
0.215
0.202
0.159
0.170
0.178
0.206
0.212
0.172
0.170
0.197
0.224
0.227
0.182
0.167
0.183
0.194
0.250
0.206
0.176
0.183
0.202
0.270
0.196
0.181
0.181
0.184
0.298
0.220
0.208
0.188
0.202
0.293
0.229
0.197
0.190
0.208
0.333
0.233
0.206
0.200
0.199
0.795
0.599
0.500
0.471
0.423
0.651
0.564
0.485
0.447
0.416
0.627
0.561
0.457
0.440
0.387
0.585
0.509
0.452
0.439
0.385
0.533
0.474
0.435
0.390
0.390
0.516
0.495
0.424
0.410
0.392
0.504
0.451
0.407
0.401
0.360
0.459
0.432
0.397
0.386
0.368
0.485
0.426
0.387
0.369
0.389
0.451
0.416
0.385
0.377
0.375
0.130
0.127
0.151
0.159
0.180
0.147
0.141
0.155
0.179
0.175
0.157
0.141
0.145
0.158
0.168
0.161
0.144
0.156
0.190
0.189
0.170
0.150
0.153
0.157
0.180
0.188
0.165
0.155
0.161
0.180
0.200
0.158
0.155
0.165
0.167
0.216
0.179
0.168
0.158
0.182
0.216
0.185
0.166
0.168
0.188
0.237
0.186
0.169
0.182
0.188
0.161
0.150
0.181
0.203
0.231
0.207
0.163
0.183
0.223
0.237
0.213
0.170
0.173
0.181
0.214
0.217
0.182
0.172
0.203
0.227
0.235
0.203
0.171
0.177
0.196
0.257
0.212
0.183
0.188
0.199
0.277
0.203
0.190
0.187
0.200
0.296
0.225
0.208
0.185
0.195
0.298
0.236
0.206
0.192
0.196
0.330
0.240
0.216
0.195
0.196
0.158
0.166
0.200
0.224
0.265
0.217
0.180
0.207
0.246
0.285
0.223
0.190
0.199
0.207
0.265
0.226
0.199
0.201
0.236
0.271
0.244
0.229
0.201
0.207
0.241
0.276
0.233
0.211
0.228
0.242
0.296
0.230
0.229
0.232
0.248
0.314
0.263
0.250
0.222
0.233
0.324
0.270
0.251
0.237
0.280
0.367
0.279
0.263
0.237
0.234
Panel C. HY V12
λ15
λ115
λ130
λ145
λ160
1.107
0.763
0.571
0.502
0.462
0.900
0.653
0.537
0.471
0.435
Panel D. HYS V12
λ15
λ115
λ130
λ145
λ160
0.109
0.127
0.161
0.185
0.233
0.114
0.124
0.144
0.172
0.196
Panel E. MK V12
λ15
λ115
λ130
λ145
λ160
0.116
0.163
0.228
0.264
0.323
0.138
0.160
0.188
0.227
0.258
Panel F. FTRK V12
λ15
λ115
λ130
λ145
λ160
0.116
0.159
0.239
0.284
0.353
0.134
0.170
0.203
0.247
0.300
23
Table 3: Noise Model 1 (i.i.d.) - Variance of Process 1 (V1) - BIAS.
λ25
λ210
λ215
λ220
λ225
λ230
λ235
λ240
λ245
λ250
λ255
λ260
-0.004
-0.002
-0.015
0.000
-0.008
-0.001
0.006
0.002
-0.009
-0.006
-0.004
0.005
-0.009
-0.014
-0.009
-0.008
-0.003
-0.011
-0.001
-0.015
-0.005
-0.003
0.000
-0.002
0.000
-0.005
-0.005
-0.011
-0.004
-0.011
-0.007
0.001
-0.006
-0.009
-0.003
-0.006
-0.004
-0.004
-0.012
-0.004
-0.005
-0.004
-0.005
-0.011
-0.003
Panel A. OLS V1 (base scenario)
λ15
λ115
λ130
λ145
λ160
-0.007
-0.002
-0.003
-0.005
-0.007
-0.007
-0.009
-0.003
-0.002
-0.008
-0.007
-0.001
-0.008
-0.003
0.003
Panel B. OLS V1 (optimal Q and S)
λ15
λ115
λ130
λ145
λ160
-0.004
-0.001
-0.006
-0.005
-0.007
-0.005
-0.009
-0.004
-0.004
-0.007
-0.008
-0.002
-0.006
-0.006
0.005
-0.003
-0.005
-0.015
-0.001
-0.008
-0.002
0.001
-0.001
-0.010
-0.005
-0.005
0.003
-0.012
-0.013
-0.007
-0.008
-0.006
-0.013
-0.002
-0.015
-0.004
-0.006
0.000
-0.005
-0.001
-0.004
-0.008
-0.009
-0.004
-0.010
-0.006
0.001
-0.006
-0.008
-0.004
-0.006
-0.006
-0.007
-0.011
-0.004
-0.006
-0.003
-0.005
-0.011
0.000
0.096
0.115
0.126
0.134
0.145
0.103
0.109
0.120
0.140
0.156
0.104
0.117
0.130
0.130
0.147
0.104
0.120
0.123
0.130
0.150
0.097
0.113
0.124
0.135
0.142
0.100
0.114
0.122
0.139
0.145
0.104
0.113
0.122
0.142
0.150
0.095
0.111
0.120
0.135
0.142
0.100
0.112
0.123
0.135
0.150
0.101
0.110
0.122
0.126
0.151
0.076
0.208
0.076
0.067
0.068
0.071
0.190
0.088
0.075
0.078
0.050
0.148
0.105
0.086
0.089
0.048
0.140
0.264
0.100
0.090
0.053
0.121
0.265
0.115
0.094
0.033
0.100
0.221
0.121
0.110
0.051
0.105
0.197
0.272
0.123
0.029
0.085
0.163
0.248
0.173
0.044
0.083
0.163
0.262
0.142
0.049
0.085
0.145
0.239
0.316
0.018
0.027
0.015
0.014
0.020
0.024
0.033
0.017
0.009
0.029
0.013
0.024
0.023
0.014
0.025
0.012
0.027
0.059
0.012
0.017
0.022
0.019
0.039
0.017
0.004
0.003
0.004
0.034
0.015
0.011
0.026
0.015
0.023
0.035
0.018
0.006
0.009
0.013
0.025
0.015
0.024
0.016
0.010
0.037
0.021
0.034
0.023
0.005
0.026
0.036
Panel C. UK V1
λ15
λ115
λ130
λ145
λ160
0.099
0.111
0.129
0.145
0.152
0.095
0.111
0.125
0.141
0.147
Panel D. MK V1
λ15
λ115
λ130
λ145
λ160
0.150
0.058
0.049
0.050
0.042
0.103
0.079
0.062
0.059
0.046
Panel E. FTRK V1
λ15
λ115
λ130
λ145
λ160
0.017
0.019
0.020
0.029
0.027
0.020
0.019
0.015
0.018
0.017
24
Table 4: Noise Model 1 (i.i.d.) - Variance of Process 1 (V1) - RMSE.
λ25
λ210
λ215
λ220
λ225
λ230
λ235
λ240
λ245
λ250
λ255
λ260
0.192
0.250
0.250
0.272
0.339
0.180
0.470
0.478
0.299
0.351
0.182
0.243
0.247
0.273
0.321
0.189
0.279
0.363
0.294
0.313
0.196
1.983
0.266
0.268
0.344
0.193
0.264
0.259
0.291
0.343
0.173
0.224
0.257
0.272
0.361
0.195
0.224
1.476
0.320
0.316
Panel A. OLS V1 (base scenario)
λ15
λ115
λ130
λ145
λ160
0.192
0.232
0.261
0.287
0.338
0.196
0.233
0.247
0.309
0.318
0.186
0.249
0.262
0.284
0.327
0.200
1.117
0.260
0.304
0.292
Panel B. OLS V1 (optimal Q and S)
λ15
λ115
λ130
λ145
λ160
0.171
0.208
0.232
0.247
0.290
0.173
0.190
0.231
0.290
0.294
0.162
0.223
0.242
0.263
0.313
0.173
0.225
0.244
0.279
0.292
0.167
0.213
0.231
0.249
0.294
0.162
0.231
0.235
0.269
0.308
0.159
0.205
0.220
0.250
0.295
0.162
0.212
0.252
0.276
0.282
0.171
0.217
0.237
0.246
0.314
0.167
0.211
0.249
0.252
0.313
0.152
0.199
0.245
0.249
0.315
0.172
0.192
0.238
0.278
0.286
0.230
0.295
0.353
0.361
0.406
0.238
0.293
0.346
0.395
0.415
0.236
0.289
0.335
0.354
0.403
0.241
0.309
0.350
0.389
0.440
0.229
0.283
0.338
0.363
0.382
0.234
0.287
0.343
0.385
0.401
0.244
0.291
0.333
0.366
0.402
0.244
0.284
0.325
0.381
0.428
0.233
0.291
0.330
0.354
0.431
0.247
0.285
0.346
0.380
0.394
0.296
0.349
0.343
0.401
0.472
0.347
0.350
0.328
0.417
0.442
0.357
0.345
0.311
0.354
0.426
0.385
0.355
0.419
0.373
0.481
0.403
0.372
0.418
0.342
0.367
0.432
0.370
0.418
0.361
0.395
0.493
0.374
0.408
0.460
0.379
0.465
0.399
0.403
0.452
0.398
0.493
0.413
0.437
0.468
0.392
0.559
0.437
0.412
0.450
0.488
0.265
0.288
0.357
0.444
0.528
0.326
0.295
0.346
0.475
0.520
0.357
0.319
0.319
0.391
0.513
0.378
0.331
0.353
0.412
0.587
0.422
0.377
0.347
0.372
0.428
0.454
0.374
0.384
0.403
0.456
0.531
0.396
0.403
0.424
0.434
0.498
0.458
0.440
0.429
0.432
0.539
0.479
0.474
0.443
0.455
0.617
0.512
0.467
0.439
0.426
Panel C. UK V1
λ15
λ115
λ130
λ145
λ160
0.238
0.294
0.356
0.390
0.406
0.235
0.288
0.335
0.395
0.389
Panel D. MK V1
λ15
λ115
λ130
λ145
λ160
0.258
0.332
0.455
0.531
0.611
0.263
0.268
0.357
0.436
0.508
Panel E. FTRK V1
λ15
λ115
λ130
λ145
λ160
0.206
0.316
0.470
0.560
0.653
0.229
0.251
0.373
0.469
0.575
25
Table 5: Noise Model 1 (i.i.d.) - Variance of Process 2 (V2) - BIAS.
λ25
λ210
λ215
λ220
λ225
λ230
λ235
λ240
λ245
λ250
λ255
λ260
-0.012
-0.015
-0.008
-0.006
-0.010
-0.014
-0.006
-0.011
-0.020
-0.011
-0.025
-0.011
-0.013
-0.009
-0.007
-0.008
-0.008
-0.002
-0.022
-0.018
-0.017
-0.014
-0.012
-0.028
-0.010
-0.013
-0.012
-0.024
-0.016
-0.016
-0.044
-0.012
-0.016
-0.028
-0.019
-0.014
-0.016
-0.012
-0.011
0.000
-0.021
-0.007
-0.010
-0.013
-0.022
Panel A. OLS V2 (base scenario)
λ15
λ115
λ130
λ145
λ160
-0.014
-0.009
-0.018
-0.011
-0.015
-0.013
-0.007
-0.009
-0.014
-0.010
-0.020
-0.011
-0.015
-0.010
-0.010
Panel B. OLS V2 (optimal Q and S
λ15
λ115
λ130
λ145
λ160
-0.013
-0.010
-0.016
-0.011
-0.013
-0.014
-0.011
-0.011
-0.013
-0.012
-0.018
-0.014
-0.018
-0.011
-0.011
-0.015
-0.014
-0.014
-0.008
-0.009
-0.017
-0.007
-0.012
-0.018
-0.015
-0.027
-0.014
-0.012
-0.012
-0.010
-0.010
-0.011
-0.004
-0.022
-0.021
-0.017
-0.016
-0.011
-0.028
-0.011
-0.012
-0.015
-0.022
-0.014
-0.016
-0.037
-0.015
-0.019
-0.028
-0.020
-0.013
-0.017
-0.017
-0.012
-0.002
-0.017
-0.010
-0.010
-0.014
-0.022
0.091
0.097
0.096
0.095
0.094
0.102
0.099
0.099
0.100
0.099
0.099
0.104
0.105
0.099
0.107
0.097
0.110
0.109
0.099
0.122
0.110
0.109
0.121
0.111
0.110
0.102
0.118
0.119
0.101
0.113
0.113
0.120
0.119
0.127
0.124
0.097
0.123
0.119
0.108
0.122
0.119
0.120
0.130
0.123
0.139
0.121
0.126
0.128
0.137
0.119
0.039
0.100
0.113
0.081
0.070
0.040
0.076
0.144
0.096
0.081
0.026
0.067
0.174
0.126
0.105
0.026
0.062
0.113
0.171
0.126
0.025
0.062
0.102
0.206
0.140
0.024
0.058
0.087
0.180
0.149
0.022
0.054
0.078
0.110
0.198
0.001
0.048
0.073
0.090
0.213
0.021
0.043
0.076
0.115
0.260
0.023
0.043
0.069
0.093
0.132
0.004
0.017
0.009
0.000
0.012
0.013
0.011
0.006
-0.001
0.011
0.001
0.011
0.015
-0.001
0.003
0.003
0.007
0.004
0.007
0.000
0.000
0.012
0.017
0.029
-0.002
0.006
0.011
0.009
0.015
-0.005
0.003
0.009
0.003
0.015
0.010
-0.015
0.007
0.005
-0.003
0.009
0.005
0.006
0.007
0.014
0.043
0.011
0.004
-0.001
0.003
-0.004
Panel C. UK V2
λ15
λ115
λ130
λ145
λ160
0.080
0.085
0.078
0.084
0.079
0.088
0.089
0.089
0.088
0.091
Panel D. MK V2
λ15
λ115
λ130
λ145
λ160
0.097
0.067
0.035
0.032
0.025
0.054
0.116
0.073
0.065
0.041
Panel E. FTRK V2
λ15
λ115
λ130
λ145
λ160
0.011
0.014
0.002
0.009
0.006
0.013
0.009
0.011
0.015
0.006
26
Table 6: Noise Model 1 (i.i.d.) - Variance of Process 2 (V2) - RMSE.
λ25
λ210
λ215
λ220
λ225
λ230
λ235
λ240
λ245
λ250
λ255
λ260
0.297
0.296
0.286
0.294
0.344
0.314
0.421
0.312
0.273
0.295
0.330
0.331
0.311
0.296
0.341
0.332
0.346
0.343
0.291
0.327
0.334
0.323
0.315
0.343
0.327
0.391
0.352
0.366
0.387
0.358
0.342
0.358
0.354
0.341
0.376
0.354
0.377
0.342
0.375
0.356
Panel A. OLS V2 (base scenario)
λ15
λ115
λ130
λ145
λ160
0.200
0.195
0.196
0.205
0.202
0.228
0.217
0.238
0.242
0.232
0.239
0.447
0.257
0.263
0.271
0.299
0.313
0.289
0.279
0.272
Panel B. OLS V2 (optimal Q and S)
λ15
λ115
λ130
λ145
λ160
0.173
0.172
0.172
0.178
0.175
0.195
0.186
0.206
0.208
0.208
0.216
0.247
0.234
0.235
0.229
0.251
0.262
0.251
0.235
0.236
0.265
0.250
0.262
0.273
0.287
0.282
0.289
0.282
0.254
0.267
0.297
0.263
0.285
0.278
0.319
0.301
0.309
0.306
0.265
0.301
0.308
0.298
0.285
0.332
0.300
0.347
0.326
0.346
0.343
0.333
0.325
0.333
0.320
0.301
0.342
0.331
0.341
0.320
0.350
0.356
0.315
0.348
0.333
0.321
0.322
0.365
0.361
0.355
0.346
0.360
0.371
0.374
0.370
0.381
0.378
0.378
0.380
0.400
0.365
0.390
0.391
0.393
0.395
0.386
0.415
0.383
0.409
0.401
0.383
0.413
0.414
0.418
0.413
0.428
0.411
0.421
0.419
0.413
0.423
0.425
0.427
0.425
0.422
0.416
0.438
0.434
0.413
0.420
0.438
0.459
0.343
0.339
0.400
0.419
0.445
0.408
0.358
0.393
0.444
0.463
0.448
0.374
0.408
0.409
0.442
0.464
0.388
0.385
0.436
0.465
0.496
0.415
0.382
0.436
0.452
0.539
0.419
0.384
0.436
0.433
0.586
0.435
0.396
0.390
0.485
0.592
0.485
0.428
0.408
0.471
0.620
0.481
0.426
0.396
0.525
0.643
0.503
0.436
0.409
0.429
0.333
0.329
0.396
0.442
0.505
0.415
0.359
0.384
0.461
0.521
0.460
0.394
0.392
0.420
0.504
0.476
0.408
0.400
0.448
0.542
0.514
0.447
0.407
0.421
0.507
0.570
0.450
0.410
0.447
0.478
0.620
0.474
0.441
0.427
0.503
0.621
0.545
0.476
0.432
0.472
0.662
0.532
0.497
0.452
0.538
0.698
0.572
0.516
0.462
0.496
Panel C. UK V2
λ15
λ115
λ130
λ145
λ160
0.267
0.256
0.249
0.273
0.255
0.298
0.299
0.313
0.309
0.305
Panel D. MK V2
λ15
λ115
λ130
λ145
λ160
0.263
0.344
0.423
0.477
0.573
0.309
0.357
0.399
0.439
0.489
Panel E. FTRK V2
λ15
λ115
λ130
λ145
λ160
0.229
0.319
0.436
0.509
0.625
0.289
0.343
0.411
0.459
0.561
27
Table 7: Noise Model 2 (AR(1)) - Covariance (V12) - BIAS.
λ25
λ210
λ215
λ220
λ225
λ230
λ235
λ240
λ245
λ250
λ255
λ260
-0.013
-0.016
-0.015
-0.008
-0.019
-0.016
-0.020
-0.008
-0.022
-0.025
-0.019
-0.013
-0.015
-0.018
-0.019
-0.020
-0.019
-0.010
-0.010
-0.018
-0.024
-0.015
-0.017
-0.011
-0.006
-0.030
-0.018
-0.020
-0.012
-0.024
-0.022
-0.011
-0.013
-0.020
-0.020
-0.022
-0.020
-0.013
-0.028
-0.019
-0.027
-0.018
-0.032
-0.009
-0.012
Panel A. OLS V12 (base scenario)
λ15
λ115
λ130
λ145
λ160
-0.009
-0.015
-0.027
-0.024
-0.022
-0.012
-0.014
-0.013
-0.024
-0.033
-0.014
-0.009
-0.020
-0.017
-0.017
Panel B. OLS V12 (optimal Q and S)
λ15
λ115
λ130
λ145
λ160
-0.008
-0.015
-0.027
-0.024
-0.022
-0.012
-0.014
-0.013
-0.024
-0.033
-0.014
-0.009
-0.019
-0.017
-0.017
-0.013
-0.016
-0.016
-0.009
-0.019
-0.016
-0.020
-0.008
-0.022
-0.025
-0.020
-0.013
-0.013
-0.018
-0.018
-0.021
-0.019
-0.010
-0.011
-0.018
-0.025
-0.016
-0.017
-0.010
-0.006
-0.030
-0.018
-0.020
-0.012
-0.025
-0.022
-0.011
-0.011
-0.019
-0.021
-0.022
-0.020
-0.013
-0.029
-0.022
-0.027
-0.019
-0.032
-0.009
-0.012
-0.025
-0.021
-0.012
-0.006
0.001
-0.056
-0.037
-0.019
0.003
-0.023
-0.010
0.006
-0.032
-0.016
-0.018
-0.003
0.043
-0.017
-0.007
0.004
0.014
0.016
0.016
-0.017
-0.014
-0.030
-0.030
-0.023
0.030
0.011
-0.005
-0.022
-0.007
0.029
-0.005
-0.010
-0.022
0.019
0.015
-0.010
0.041
0.023
0.002
-0.020
0.001
-0.014
-0.019
-0.003
-0.010
0.003
-0.009
-0.008
-0.013
-0.013
-0.013
-0.014
-0.017
-0.013
-0.009
-0.018
-0.013
-0.013
-0.010
-0.020
-0.024
-0.016
-0.005
-0.010
-0.015
-0.014
-0.015
-0.012
-0.007
-0.011
-0.017
-0.020
-0.015
-0.017
-0.003
-0.003
-0.025
-0.016
-0.017
-0.004
-0.020
-0.020
-0.011
-0.007
-0.013
-0.018
-0.018
-0.014
-0.007
-0.026
-0.016
-0.023
-0.016
-0.025
-0.007
-0.007
-0.004
-0.007
-0.010
-0.001
0.002
-0.001
-0.008
-0.014
-0.006
-0.001
0.001
-0.010
-0.008
-0.011
-0.005
-0.001
-0.005
-0.015
-0.012
-0.013
-0.001
-0.002
-0.013
-0.014
-0.015
0.002
-0.005
-0.021
-0.019
-0.020
-0.002
-0.004
-0.018
-0.020
-0.024
0.007
-0.003
-0.011
-0.021
-0.028
0.003
-0.002
-0.006
-0.034
-0.040
0.007
0.001
-0.023
-0.017
-0.030
-0.003
-0.001
-0.008
0.001
0.003
-0.001
-0.005
-0.011
-0.003
0.003
0.000
-0.006
0.001
-0.005
0.001
-0.002
-0.004
-0.007
-0.005
-0.003
-0.004
-0.001
-0.002
-0.003
-0.006
-0.002
-0.004
-0.008
-0.006
-0.008
-0.004
-0.003
-0.009
-0.007
-0.004
0.005
-0.001
-0.008
-0.005
-0.011
0.004
0.002
0.000
-0.017
-0.014
0.006
0.003
-0.017
-0.005
-0.005
Panel C. HY V12
λ15
λ115
λ130
λ145
λ160
-0.053
-0.041
0.012
-0.020
-0.019
0.015
-0.057
-0.014
-0.011
-0.016
Panel D. HYS V12
λ15
λ115
λ130
λ145
λ160
-0.010
-0.013
-0.022
-0.021
-0.023
-0.007
-0.014
-0.010
-0.020
-0.029
Panel E. MK V12
λ15
λ115
λ130
λ145
λ160
-0.005
-0.005
-0.003
0.007
0.011
-0.006
-0.006
-0.003
-0.006
-0.008
Panel F. FTRK V12
λ15
λ115
λ130
λ145
λ160
-0.003
-0.004
-0.007
0.004
0.013
-0.007
-0.005
-0.005
-0.006
-0.006
28
Table 8: Noise Model 2 (AR(1)) - Covariance (V12) - RMSE.
λ25
λ210
λ215
λ220
λ225
λ230
λ235
λ240
λ245
λ250
λ255
λ260
0.217
0.167
0.190
0.189
0.243
0.237
0.184
0.175
0.189
0.202
0.248
0.200
0.179
0.192
0.196
0.253
0.215
0.182
0.184
0.256
0.277
0.228
0.188
0.190
0.200
0.311
0.235
0.211
0.198
0.188
0.301
0.238
0.216
0.221
0.218
0.320
0.248
0.207
0.208
0.194
Panel A. OLS V12 (base scenario)
λ15
λ115
λ130
λ145
λ160
0.115
0.161
0.206
0.262
0.327
0.136
0.148
0.188
0.220
0.260
0.164
0.149
0.188
0.202
0.259
0.191
0.152
0.165
0.208
0.215
Panel B. OLS V12 (optimal Q and S)
λ15
λ115
λ130
λ145
λ160
0.110
0.156
0.205
0.259
0.328
0.131
0.139
0.185
0.217
0.258
0.158
0.144
0.182
0.197
0.253
0.187
0.148
0.160
0.207
0.211
0.212
0.164
0.183
0.185
0.229
0.234
0.182
0.172
0.185
0.197
0.246
0.198
0.177
0.187
0.191
0.252
0.211
0.177
0.181
0.243
0.281
0.224
0.189
0.183
0.188
0.315
0.234
0.201
0.192
0.185
0.295
0.237
0.210
0.209
0.203
0.319
0.245
0.206
0.203
0.191
0.876
0.736
0.570
0.550
0.477
0.793
0.660
0.565
0.496
0.476
0.725
0.628
0.545
0.487
0.447
0.661
0.598
0.516
0.494
0.476
0.641
0.568
0.497
0.465
0.453
0.615
0.522
0.470
0.424
0.440
0.590
0.536
0.467
0.459
0.413
0.535
0.520
0.475
0.441
0.426
0.551
0.479
0.459
0.432
0.413
0.497
0.459
0.442
0.427
0.406
0.130
0.139
0.149
0.168
0.202
0.148
0.138
0.147
0.165
0.177
0.165
0.141
0.164
0.156
0.192
0.176
0.154
0.152
0.176
0.174
0.187
0.159
0.162
0.167
0.171
0.189
0.167
0.162
0.158
0.212
0.208
0.175
0.168
0.171
0.180
0.227
0.185
0.166
0.181
0.174
0.216
0.182
0.190
0.186
0.183
0.237
0.195
0.184
0.182
0.186
0.174
0.151
0.195
0.214
0.271
0.192
0.151
0.169
0.221
0.227
0.222
0.178
0.181
0.196
0.235
0.236
0.194
0.168
0.193
0.208
0.251
0.209
0.176
0.193
0.201
0.247
0.219
0.184
0.170
0.222
0.273
0.235
0.190
0.182
0.200
0.307
0.240
0.201
0.197
0.192
0.300
0.239
0.207
0.192
0.199
0.321
0.251
0.208
0.196
0.197
0.174
0.162
0.215
0.244
0.307
0.191
0.163
0.186
0.245
0.267
0.226
0.193
0.205
0.226
0.269
0.241
0.217
0.186
0.227
0.249
0.257
0.234
0.210
0.229
0.246
0.249
0.247
0.215
0.207
0.254
0.283
0.273
0.221
0.221
0.250
0.319
0.273
0.237
0.235
0.253
0.320
0.279
0.248
0.238
0.239
0.345
0.290
0.243
0.245
0.251
Panel C. HY V12
λ15
λ115
λ130
λ145
λ160
1.296
0.936
0.684
0.577
0.492
1.043
0.824
0.619
0.533
0.497
Panel D. HYS V12
λ15
λ115
λ130
λ145
λ160
0.118
0.129
0.161
0.195
0.238
0.116
0.127
0.151
0.165
0.202
Panel E. MK V12
λ15
λ115
λ130
λ145
λ160
0.116
0.167
0.218
0.271
0.336
0.143
0.153
0.199
0.225
0.273
Panel F. FTRK V12
λ15
λ115
λ130
λ145
λ160
0.118
0.163
0.219
0.281
0.370
0.136
0.161
0.214
0.244
0.311
29
Table 9: Noise Model 2 (AR(1)) - Variance of Process 1 (V1) - BIAS.
λ25
λ210
λ215
λ220
λ225
λ230
λ235
λ240
λ245
λ250
λ255
λ260
-0.001
-0.008
-0.011
0.001
-0.011
-0.005
0.002
-0.005
-0.024
-0.009
-0.002
0.052
-0.004
-0.004
-0.007
-0.001
0.018
-0.004
-0.008
-0.017
-0.008
0.065
-0.008
-0.017
-0.014
-0.001
-0.006
-0.012
-0.012
0.006
0.001
-0.005
-0.005
-0.013
-0.014
-0.005
-0.007
0.005
-0.012
-0.013
-0.003
-0.047
0.023
-0.007
-0.016
Panel A. OLS V1 (base scenario)
λ15
λ115
λ130
λ145
λ160
-0.001
-0.057
-0.005
-0.003
-0.023
-0.006
-0.006
-0.003
-0.004
-0.025
-0.004
0.088
-0.001
-0.009
-0.012
Panel B. OLS V1 (optimal Q and S)
λ15
λ115
λ130
λ145
λ160
-0.089
-0.032
-0.017
-0.007
-0.023
-0.104
-0.030
-0.011
-0.009
-0.033
-0.096
-0.017
-0.019
-0.012
-0.012
-0.091
-0.034
-0.022
-0.005
-0.013
-0.092
-0.022
-0.008
-0.015
-0.009
-0.095
-0.023
-0.014
-0.014
-0.012
-0.091
-0.029
-0.013
-0.015
-0.020
-0.100
-0.031
-0.025
-0.004
-0.017
-0.101
-0.024
-0.022
-0.019
0.001
-0.094
-0.026
-0.015
-0.021
-0.008
-0.095
-0.023
-0.007
-0.017
-0.014
-0.097
-0.023
-0.006
-0.015
-0.017
0.125
0.149
0.154
0.169
0.189
0.129
0.133
0.158
0.182
0.188
0.123
0.144
0.155
0.164
0.197
0.126
0.141
0.153
0.174
0.186
0.129
0.134
0.152
0.170
0.181
0.121
0.135
0.156
0.173
0.175
0.126
0.144
0.150
0.160
0.193
0.127
0.136
0.154
0.168
0.178
0.124
0.137
0.161
0.167
0.186
0.126
0.134
0.168
0.159
0.182
0.100
0.176
0.098
0.092
0.080
0.080
0.222
0.116
0.106
0.091
0.072
0.214
0.146
0.117
0.106
0.068
0.170
0.142
0.135
0.125
0.060
0.138
0.305
0.181
0.132
0.065
0.128
0.295
0.301
0.140
0.045
0.120
0.243
0.272
0.159
0.054
0.110
0.214
0.328
0.161
0.058
0.096
0.237
0.332
0.220
0.057
0.100
0.156
0.296
0.193
0.032
0.035
0.023
0.027
0.027
0.021
0.018
0.019
0.026
0.025
0.022
0.024
0.028
0.020
0.026
0.027
0.026
0.020
0.026
0.022
0.022
0.026
0.047
0.027
0.017
0.028
0.022
0.041
0.051
0.013
0.016
0.023
0.024
0.019
0.016
0.029
0.019
0.022
0.029
0.013
0.031
0.026
0.025
0.041
0.034
0.033
0.017
-0.006
0.047
0.023
Panel C. UK V1
λ15
λ115
λ130
λ145
λ160
0.129
0.138
0.150
0.162
0.186
0.124
0.135
0.158
0.176
0.172
Panel D. MK V1
λ15
λ115
λ130
λ145
λ160
0.127
0.071
0.058
0.063
0.059
0.129
0.101
0.079
0.077
0.054
Panel E. FTRK V1
λ15
λ115
λ130
λ145
λ160
0.029
0.023
0.020
0.034
0.045
0.024
0.023
0.021
0.028
0.020
30
Table 10: Noise Model 2 (AR(1)) - Variance of Process 1 (V1) - RMSE.
λ25
λ210
λ215
λ220
λ225
λ230
λ235
λ240
λ245
λ250
λ255
λ260
0.185
0.221
0.273
0.301
0.297
0.198
0.533
0.258
0.311
0.333
0.202
0.276
0.251
0.287
0.339
0.183
0.286
0.281
0.287
0.323
0.214
0.294
0.272
0.292
0.366
0.217
0.266
0.286
0.281
0.305
0.189
0.223
0.281
0.309
0.322
0.187
0.290
0.270
0.317
0.320
Panel A. OLS V1 (base scenario)
λ15
λ115
λ130
λ145
λ160
0.195
0.272
0.272
0.278
0.326
0.189
0.235
0.262
0.308
0.328
0.216
0.451
0.273
0.293
0.355
0.205
0.246
0.245
0.306
0.328
Panel B. OLS V1 (optimal Q and S)
λ15
λ115
λ130
λ145
λ160
0.196
0.195
0.255
0.265
0.288
0.198
0.222
0.240
0.268
0.300
0.212
0.201
0.253
0.270
0.319
0.205
0.217
0.236
0.281
0.318
0.189
0.213
0.253
0.275
0.297
0.194
0.209
0.240
0.290
0.301
0.197
0.211
0.242
0.271
0.297
0.197
0.217
0.263
0.258
0.296
0.204
0.231
0.256
0.263
0.334
0.212
0.218
0.265
0.266
0.273
0.195
0.206
0.263
0.270
0.297
0.190
0.212
0.250
0.291
0.292
0.260
0.309
0.372
0.396
0.447
0.272
0.306
0.347
0.415
0.432
0.253
0.317
0.373
0.394
0.440
0.264
0.319
0.365
0.411
0.444
0.271
0.302
0.353
0.401
0.418
0.252
0.320
0.361
0.374
0.419
0.265
0.316
0.361
0.378
0.470
0.264
0.304
0.382
0.390
0.403
0.256
0.306
0.382
0.401
0.419
0.253
0.313
0.394
0.375
0.437
0.310
0.314
0.353
0.422
0.494
0.346
0.373
0.314
0.423
0.432
0.377
0.382
0.355
0.376
0.438
0.414
0.380
0.338
0.386
0.425
0.427
0.405
0.464
0.382
0.375
0.425
0.414
0.482
0.456
0.387
0.450
0.430
0.449
0.437
0.416
0.508
0.445
0.430
0.503
0.371
0.520
0.471
0.457
0.505
0.418
0.528
0.422
0.419
0.485
0.402
0.271
0.261
0.360
0.465
0.564
0.311
0.307
0.300
0.463
0.486
0.362
0.315
0.344
0.410
0.506
0.418
0.353
0.334
0.408
0.494
0.430
0.406
0.376
0.371
0.415
0.425
0.431
0.417
0.369
0.425
0.477
0.477
0.420
0.383
0.446
0.538
0.481
0.415
0.432
0.410
0.554
0.547
0.437
0.446
0.430
0.569
0.471
0.457
0.468
0.439
Panel C. UK V1
λ15
λ115
λ130
λ145
λ160
0.264
0.305
0.356
0.383
0.444
0.263
0.317
0.351
0.412
0.421
Panel D. MK V1
λ15
λ115
λ130
λ145
λ160
0.243
0.309
0.453
0.543
0.688
0.283
0.287
0.376
0.453
0.546
Panel E. FTRK V1
λ15
λ115
λ130
λ145
λ160
0.211
0.280
0.455
0.552
0.742
0.235
0.267
0.385
0.489
0.611
31
Table 11: Noise Model 2 (AR(1)) - Variance of Process 2 (V2) - BIAS.
λ25
λ210
λ215
λ220
λ225
λ230
λ235
λ240
λ245
λ250
λ255
λ260
-0.012
-0.015
-0.025
-0.097
-0.014
-0.007
-0.005
-0.011
-0.017
-0.011
-0.017
-0.094
-0.016
-0.008
-0.017
-0.015
-0.021
-0.015
-0.007
-0.008
0.028
-0.037
0.004
-0.013
-0.018
-0.020
-0.016
-0.019
-0.007
0.002
-0.014
-0.029
-0.003
-0.015
-0.014
-0.025
-0.011
-0.002
-0.026
-0.008
-0.012
-0.018
-0.034
-0.014
-0.013
Panel A. OLS V2 (base scenario)
λ15
λ115
λ130
λ145
λ160
-0.015
-0.014
-0.012
-0.013
-0.017
-0.014
-0.011
-0.018
-0.014
-0.020
-0.056
0.035
-0.005
0.030
-0.087
Panel B. OLS V2 (optimal Q and S)
λ15
λ115
λ130
λ145
λ160
-0.049
-0.050
-0.047
-0.050
-0.053
-0.028
-0.027
-0.031
-0.030
-0.034
-0.019
-0.019
-0.018
-0.024
-0.022
-0.018
-0.025
-0.020
-0.017
-0.016
-0.015
-0.018
-0.016
-0.022
-0.019
-0.021
-0.019
-0.022
-0.020
-0.022
-0.020
-0.024
-0.020
-0.017
-0.011
-0.015
-0.020
-0.019
-0.017
-0.018
-0.029
-0.019
-0.020
-0.011
-0.026
-0.024
-0.029
-0.008
-0.018
-0.015
-0.029
-0.016
-0.005
-0.026
-0.012
-0.018
-0.020
-0.032
-0.018
-0.016
0.098
0.103
0.105
0.098
0.095
0.101
0.098
0.099
0.105
0.104
0.109
0.107
0.102
0.103
0.115
0.108
0.104
0.103
0.100
0.110
0.107
0.104
0.114
0.118
0.113
0.118
0.117
0.113
0.114
0.112
0.115
0.124
0.123
0.126
0.112
0.122
0.120
0.127
0.132
0.124
0.117
0.128
0.138
0.118
0.130
0.127
0.131
0.116
0.135
0.132
0.045
0.166
0.103
0.086
0.060
0.040
0.069
0.158
0.098
0.090
0.038
0.066
0.177
0.140
0.092
0.021
0.057
0.215
0.157
0.138
0.019
0.044
0.089
0.199
0.154
0.021
0.046
0.086
0.138
0.195
0.014
0.044
0.082
0.136
0.215
0.019
0.042
0.078
0.106
0.223
0.014
0.044
0.087
0.089
0.243
0.022
0.041
0.056
0.097
0.235
0.015
0.023
0.002
0.008
0.001
0.010
0.009
0.013
0.007
0.011
0.013
0.009
0.020
0.009
0.002
-0.002
0.007
0.020
-0.003
0.007
-0.001
-0.001
0.011
0.024
0.004
-0.001
0.002
0.001
0.007
0.022
-0.004
0.003
0.009
0.013
0.015
0.001
0.004
0.003
0.014
0.010
0.000
0.012
0.013
-0.008
0.033
0.007
0.003
-0.004
0.009
0.010
Panel C. UK V2
λ15
λ115
λ130
λ145
λ160
0.083
0.085
0.086
0.083
0.079
0.092
0.093
0.088
0.089
0.089
Panel D. MK V2
λ15
λ115
λ130
λ145
λ160
0.135
0.057
0.031
0.025
0.027
0.050
0.134
0.063
0.049
0.020
Panel E. FTRK V2
λ15
λ115
λ130
λ145
λ160
0.012
0.005
-0.005
0.001
0.010
0.009
0.016
-0.004
0.000
-0.018
32
Table 12: Noise Model 2 (AR(1)) - Variance of Process 2 (V2) - RMSE.
λ25
λ210
λ215
λ220
λ225
λ230
λ235
λ240
λ245
λ250
λ255
λ260
0.305
0.300
0.249
0.305
0.269
0.308
0.424
0.298
0.293
0.292
0.299
0.304
0.299
0.302
0.319
0.340
0.333
0.356
0.324
0.345
0.364
0.345
0.343
0.317
0.341
0.353
0.319
0.350
0.367
0.356
0.369
0.343
0.379
0.374
0.364
0.379
0.376
0.365
0.368
0.355
Panel A. OLS V2 (base scenario)
λ15
λ115
λ130
λ145
λ160
0.200
0.186
0.205
0.192
0.187
0.228
0.243
0.235
0.231
0.241
0.265
0.416
0.249
0.335
0.313
0.260
0.280
0.281
0.425
0.265
Panel B. OLS V2 (optimal Q and S)
λ15
λ115
λ130
λ145
λ160
0.185
0.181
0.188
0.177
0.178
0.202
0.208
0.208
0.206
0.215
0.210
0.235
0.226
0.221
0.228
0.248
0.252
0.250
0.253
0.236
0.262
0.254
0.233
0.286
0.249
0.276
0.284
0.279
0.274
0.265
0.279
0.280
0.271
0.275
0.293
0.302
0.293
0.320
0.295
0.315
0.336
0.314
0.314
0.300
0.301
0.322
0.298
0.325
0.323
0.318
0.330
0.309
0.342
0.338
0.322
0.330
0.344
0.340
0.324
0.330
0.327
0.334
0.355
0.320
0.337
0.342
0.345
0.343
0.369
0.345
0.372
0.375
0.353
0.370
0.390
0.388
0.394
0.385
0.365
0.379
0.381
0.389
0.382
0.396
0.394
0.387
0.400
0.411
0.399
0.388
0.420
0.440
0.407
0.398
0.404
0.435
0.419
0.431
0.414
0.405
0.407
0.424
0.423
0.439
0.418
0.423
0.430
0.423
0.448
0.409
0.355
0.359
0.408
0.429
0.508
0.392
0.330
0.413
0.428
0.455
0.468
0.374
0.402
0.443
0.449
0.506
0.397
0.413
0.428
0.449
0.521
0.430
0.364
0.427
0.446
0.532
0.452
0.403
0.393
0.521
0.585
0.482
0.398
0.390
0.467
0.632
0.474
0.431
0.392
0.478
0.613
0.505
0.428
0.423
0.461
0.638
0.507
0.438
0.430
0.470
0.349
0.312
0.404
0.450
0.572
0.387
0.329
0.406
0.440
0.503
0.466
0.387
0.379
0.458
0.511
0.502
0.415
0.369
0.436
0.471
0.531
0.465
0.392
0.414
0.474
0.542
0.496
0.433
0.418
0.504
0.597
0.529
0.433
0.413
0.485
0.649
0.526
0.481
0.436
0.486
0.651
0.568
0.494
0.477
0.471
0.673
0.570
0.491
0.517
0.481
Panel C. UK V2
λ15
λ115
λ130
λ145
λ160
0.264
0.276
0.265
0.259
0.257
0.295
0.301
0.295
0.290
0.298
Panel D. MK V2
λ15
λ115
λ130
λ145
λ160
0.293
0.350
0.414
0.498
0.598
0.308
0.353
0.402
0.417
0.521
Panel E. FTRK V2
λ15
λ115
λ130
λ145
λ160
0.239
0.326
0.409
0.518
0.664
0.278
0.321
0.408
0.441
0.604
33
Table 13: Noise Model 3 (MA(1)) - Covariance (V12) - BIAS.
λ25
λ210
λ215
λ220
λ225
λ230
λ235
λ240
λ245
λ250
λ255
λ260
-0.018
-0.011
-0.012
-0.017
-0.020
-0.018
-0.016
-0.018
-0.017
-0.017
-0.021
-0.014
-0.018
-0.014
-0.017
-0.018
-0.016
-0.011
-0.005
-0.010
-0.020
-0.021
-0.011
-0.015
-0.009
-0.008
-0.018
-0.004
-0.008
-0.030
-0.032
-0.013
-0.015
-0.020
-0.009
-0.043
-0.019
-0.020
-0.025
-0.020
-0.033
-0.018
-0.014
-0.010
-0.010
Panel A. OLS V12 (base scenario)
λ15
λ115
λ130
λ145
λ160
-0.009
-0.017
-0.020
-0.033
-0.022
-0.011
-0.011
-0.011
-0.014
-0.018
-0.016
-0.009
-0.013
-0.022
-0.010
Panel B. OLS V12 (optimal Q and S)
λ15
λ115
λ130
λ145
λ160
-0.009
-0.016
-0.021
-0.033
-0.022
-0.011
-0.011
-0.012
-0.014
-0.018
-0.016
-0.009
-0.013
-0.020
-0.011
-0.018
-0.012
-0.011
-0.017
-0.020
-0.018
-0.016
-0.018
-0.017
-0.017
-0.022
-0.013
-0.017
-0.014
-0.016
-0.017
-0.016
-0.011
-0.006
-0.009
-0.020
-0.021
-0.011
-0.016
-0.010
-0.008
-0.017
-0.005
-0.009
-0.030
-0.032
-0.013
-0.014
-0.019
-0.008
-0.042
-0.018
-0.021
-0.021
-0.021
-0.033
-0.019
-0.015
-0.011
-0.009
-0.006
-0.003
-0.006
-0.010
-0.023
0.004
-0.024
0.029
0.008
0.003
0.021
-0.044
0.017
0.024
0.036
0.005
0.000
0.010
0.016
0.008
-0.034
0.026
-0.003
-0.003
0.014
-0.008
-0.010
-0.021
0.003
0.008
-0.039
0.011
0.015
-0.016
-0.005
-0.028
-0.008
0.019
0.012
-0.003
-0.029
-0.006
-0.008
0.006
0.001
0.002
0.011
0.004
0.007
0.000
-0.010
-0.004
-0.009
-0.015
-0.013
-0.014
-0.008
-0.006
-0.013
-0.017
-0.013
-0.017
-0.013
-0.013
-0.009
-0.019
-0.010
-0.012
-0.006
-0.013
-0.017
-0.009
-0.009
-0.007
-0.005
-0.016
-0.017
-0.012
-0.012
-0.007
-0.010
-0.013
-0.003
-0.007
-0.022
-0.026
-0.012
-0.008
-0.012
-0.007
-0.036
-0.017
-0.016
-0.012
-0.017
-0.025
-0.014
-0.013
-0.006
-0.006
-0.005
-0.009
-0.007
-0.002
0.001
-0.001
-0.007
-0.009
-0.005
-0.004
-0.001
-0.008
-0.018
-0.009
-0.009
0.000
-0.005
-0.022
-0.017
-0.010
0.002
-0.003
-0.008
-0.014
-0.012
0.002
-0.005
-0.014
-0.019
-0.018
0.011
-0.002
-0.010
-0.022
-0.029
0.006
-0.003
-0.018
-0.028
-0.026
0.000
0.004
-0.014
-0.018
-0.032
0.006
0.001
-0.009
-0.030
-0.027
-0.003
-0.002
-0.006
-0.001
0.004
0.000
-0.002
-0.005
-0.003
-0.002
-0.001
-0.002
-0.012
-0.004
-0.005
-0.002
-0.002
-0.011
-0.010
-0.006
0.001
-0.001
0.004
-0.003
-0.005
-0.001
-0.003
-0.005
-0.004
-0.004
0.010
-0.001
-0.002
-0.006
-0.016
0.004
-0.003
-0.011
-0.008
-0.002
-0.002
0.006
-0.010
-0.009
-0.015
0.005
0.002
-0.003
-0.013
-0.007
Panel C. HY V12
λ15
λ115
λ130
λ145
λ160
-0.002
-0.007
-0.021
-0.031
-0.002
0.004
-0.017
0.005
-0.010
0.002
Panel D. HYS V12
λ15
λ115
λ130
λ145
λ160
-0.009
-0.012
-0.017
-0.030
-0.017
-0.006
-0.010
-0.008
-0.011
-0.017
Panel E. MK V12
λ15
λ115
λ130
λ145
λ160
-0.003
-0.004
-0.002
-0.004
0.009
-0.003
-0.007
0.000
0.003
-0.001
Panel F. FTRK V12
λ15
λ115
λ130
λ145
λ160
0.000
-0.005
-0.006
-0.006
0.009
-0.004
-0.005
0.002
0.002
0.000
34
Table 14: Noise Model 3 (MA(1)) - Covariance (V12) - RMSE.
λ25
λ210
λ215
λ220
λ225
λ230
λ235
λ240
λ245
λ250
λ255
λ260
0.215
0.180
0.172
0.202
0.224
0.230
0.193
0.171
0.189
0.215
0.255
0.199
0.186
0.206
0.199
0.269
0.214
0.184
0.200
0.200
0.287
0.234
0.214
0.212
0.198
0.293
0.243
0.221
0.191
0.225
0.304
0.243
0.217
0.210
0.241
0.337
0.248
0.222
0.224
0.208
Panel A. OLS V12 (base scenario)
λ15
λ115
λ130
λ145
λ160
0.124
0.163
0.212
0.261
0.298
0.147
0.150
0.182
0.219
0.251
0.177
0.146
0.173
0.206
0.249
0.200
0.157
0.185
0.211
0.213
Panel B. OLS V12 (optimal Q and S)
λ15
λ115
λ130
λ145
λ160
0.119
0.156
0.211
0.264
0.301
0.140
0.143
0.178
0.214
0.247
0.173
0.141
0.173
0.200
0.238
0.197
0.152
0.183
0.201
0.211
0.211
0.180
0.170
0.200
0.218
0.228
0.189
0.170
0.184
0.209
0.250
0.196
0.184
0.201
0.199
0.273
0.212
0.181
0.196
0.192
0.287
0.234
0.198
0.200
0.195
0.290
0.239
0.217
0.191
0.223
0.304
0.236
0.216
0.199
0.217
0.341
0.245
0.212
0.211
0.197
1.005
0.824
0.663
0.582
0.532
0.885
0.754
0.607
0.581
0.516
0.856
0.688
0.586
0.564
0.536
0.734
0.666
0.575
0.521
0.510
0.691
0.645
0.558
0.501
0.481
0.681
0.627
0.541
0.499
0.466
0.616
0.579
0.542
0.480
0.464
0.633
0.557
0.496
0.460
0.471
0.599
0.548
0.504
0.494
0.435
0.582
0.501
0.476
0.467
0.448
0.147
0.143
0.152
0.170
0.190
0.150
0.142
0.162
0.168
0.175
0.162
0.161
0.148
0.178
0.193
0.177
0.160
0.168
0.171
0.183
0.185
0.166
0.170
0.185
0.178
0.202
0.175
0.161
0.177
0.188
0.212
0.187
0.175
0.181
0.174
0.218
0.192
0.192
0.173
0.218
0.223
0.185
0.186
0.187
0.197
0.252
0.195
0.172
0.186
0.188
0.189
0.144
0.181
0.213
0.250
0.208
0.155
0.183
0.212
0.220
0.217
0.184
0.183
0.204
0.228
0.229
0.199
0.175
0.194
0.218
0.252
0.197
0.185
0.198
0.195
0.267
0.216
0.184
0.196
0.202
0.286
0.236
0.202
0.191
0.203
0.283
0.237
0.224
0.186
0.200
0.297
0.241
0.213
0.207
0.207
0.330
0.251
0.219
0.205
0.191
0.193
0.153
0.199
0.238
0.294
0.213
0.168
0.201
0.235
0.257
0.219
0.208
0.223
0.234
0.261
0.229
0.216
0.197
0.227
0.264
0.254
0.214
0.216
0.227
0.237
0.271
0.243
0.214
0.235
0.257
0.297
0.255
0.246
0.246
0.249
0.291
0.259
0.259
0.224
0.255
0.306
0.274
0.253
0.245
0.243
0.342
0.289
0.266
0.248
0.234
Panel C. HY V12
λ15
λ115
λ130
λ145
λ160
1.446
0.990
0.755
0.652
0.586
1.160
0.896
0.697
0.627
0.572
Panel D. HYS V12
λ15
λ115
λ130
λ145
λ160
0.122
0.137
0.161
0.194
0.218
0.130
0.137
0.149
0.170
0.195
Panel E. MK V12
λ15
λ115
λ130
λ145
λ160
0.121
0.168
0.225
0.271
0.311
0.154
0.155
0.194
0.230
0.260
Panel F. FTRK V12
λ15
λ115
λ130
λ145
λ160
0.117
0.159
0.224
0.279
0.333
0.147
0.158
0.206
0.248
0.297
35
Table 15: Noise Model 3 (MA(1)) - Variance of Process 1 (V1) - BIAS.
λ25
λ210
λ215
λ220
λ225
λ230
λ235
λ240
λ245
λ250
λ255
λ260
-0.006
0.014
0.027
-0.020
-0.010
-0.004
-0.080
-0.013
0.005
-0.016
-0.005
0.013
-0.003
0.011
-0.001
-0.003
0.001
-0.042
0.010
-0.001
0.001
0.024
0.009
0.000
-0.002
-0.007
-0.078
-0.003
-0.001
-0.018
-0.003
-0.019
-0.038
-0.006
-0.003
-0.005
0.007
0.007
-0.006
-0.019
-0.002
0.044
0.008
0.002
-0.003
Panel A. OLS V1 (base scenario)
λ15
λ115
λ130
λ145
λ160
-0.003
0.013
-0.003
-0.018
-0.011
-0.009
-0.018
0.002
-0.009
-0.012
-0.009
-0.021
-0.002
0.000
-0.021
Panel B. OLS V1 (optimal Q and S)
λ15
λ115
λ130
λ145
λ160
-0.076
-0.032
-0.017
-0.031
-0.012
-0.076
-0.037
-0.014
-0.018
-0.018
-0.073
-0.027
-0.021
-0.004
-0.031
-0.077
-0.033
-0.014
-0.026
-0.013
-0.085
-0.037
-0.028
-0.004
-0.023
-0.083
-0.036
-0.022
-0.015
-0.013
-0.077
-0.036
-0.007
-0.002
-0.002
-0.078
-0.035
-0.017
-0.011
-0.005
-0.078
-0.031
-0.013
-0.011
-0.025
-0.077
-0.036
-0.023
-0.013
-0.007
-0.080
-0.030
-0.008
-0.015
-0.025
-0.078
-0.038
-0.023
-0.007
-0.006
0.132
0.150
0.163
0.197
0.209
0.134
0.148
0.170
0.174
0.197
0.137
0.147
0.153
0.194
0.189
0.131
0.156
0.169
0.181
0.206
0.133
0.153
0.185
0.197
0.206
0.137
0.155
0.173
0.189
0.206
0.133
0.155
0.163
0.200
0.195
0.133
0.153
0.163
0.196
0.211
0.134
0.153
0.171
0.186
0.187
0.135
0.149
0.178
0.202
0.205
0.107
0.324
0.106
0.101
0.098
0.092
0.265
0.117
0.104
0.102
0.086
0.193
0.138
0.129
0.119
0.071
0.178
0.153
0.149
0.128
0.066
0.168
0.350
0.173
0.148
0.075
0.152
0.325
0.173
0.165
0.067
0.127
0.249
0.199
0.149
0.063
0.131
0.254
0.438
0.185
0.053
0.122
0.224
0.332
0.174
0.056
0.115
0.217
0.354
0.264
0.024
0.056
0.022
0.033
0.043
0.032
0.038
0.020
0.021
0.022
0.033
0.027
0.026
0.027
0.028
0.026
0.027
0.023
0.013
0.028
0.025
0.022
0.048
0.031
0.022
0.039
0.028
0.051
0.028
0.017
0.033
0.031
0.023
0.028
0.008
0.032
0.026
0.011
0.067
0.021
0.024
0.041
0.014
0.037
0.006
0.031
0.027
0.030
0.053
0.033
Panel C. UK V1
λ15
λ115
λ130
λ145
λ160
0.133
0.155
0.172
0.173
0.210
0.128
0.143
0.171
0.183
0.197
Panel D. MK V1
λ15
λ115
λ130
λ145
λ160
0.186
0.081
0.062
0.052
0.073
0.143
0.111
0.093
0.090
0.075
Panel E. FTRK V1
λ15
λ115
λ130
λ145
λ160
0.037
0.031
0.021
0.021
0.053
0.032
0.024
0.032
0.035
0.031
36
Table 16: Noise Model 3 (MA(1)) - Variance of Process 1 (V1) - RMSE.
λ25
λ210
λ215
λ220
λ225
λ230
λ235
λ240
λ245
λ250
λ255
λ260
0.190
0.427
0.263
0.313
0.349
0.185
0.260
0.308
0.340
0.360
0.190
0.258
0.468
0.288
0.339
0.194
0.263
0.299
0.332
0.363
0.204
0.241
0.277
0.293
0.346
0.196
0.259
0.273
0.300
0.344
0.201
0.241
0.298
0.307
0.353
0.202
0.302
0.272
0.351
0.333
Panel A. OLS V1 (base scenario)
λ15
λ115
λ130
λ145
λ160
0.216
0.351
0.255
0.321
0.313
0.195
0.267
0.275
0.298
0.360
0.186
0.328
0.248
0.307
0.342
0.192
0.257
0.298
0.279
0.340
Panel B. OLS V1 (optimal Q and S)
λ15
λ115
λ130
λ145
λ160
0.235
0.206
0.233
0.302
0.291
0.230
0.210
0.257
0.269
0.336
0.221
0.208
0.230
0.283
0.316
0.218
0.223
0.257
0.258
0.306
0.216
0.213
0.249
0.287
0.315
0.223
0.212
0.271
0.320
0.327
0.220
0.232
0.256
0.267
0.308
0.224
0.223
0.260
0.314
0.325
0.238
0.219
0.256
0.273
0.325
0.215
0.233
0.248
0.279
0.308
0.226
0.222
0.289
0.285
0.337
0.224
0.208
0.244
0.321
0.296
0.266
0.325
0.358
0.423
0.456
0.272
0.339
0.377
0.405
0.442
0.278
0.316
0.371
0.433
0.435
0.260
0.323
0.396
0.413
0.467
0.259
0.343
0.397
0.408
0.441
0.270
0.334
0.377
0.423
0.437
0.270
0.322
0.378
0.406
0.452
0.263
0.334
0.366
0.423
0.449
0.268
0.332
0.378
0.408
0.438
0.270
0.316
0.379
0.454
0.451
0.331
0.433
0.343
0.430
0.477
0.360
0.414
0.346
0.411
0.458
0.370
0.390
0.350
0.400
0.436
0.414
0.399
0.360
0.387
0.434
0.437
0.399
0.508
0.365
0.407
0.472
0.418
0.490
0.389
0.398
0.476
0.427
0.427
0.372
0.421
0.478
0.438
0.455
0.592
0.407
0.510
0.452
0.445
0.510
0.410
0.551
0.445
0.438
0.536
0.447
0.298
0.305
0.347
0.464
0.536
0.335
0.318
0.346
0.449
0.528
0.348
0.344
0.352
0.436
0.495
0.409
0.375
0.361
0.392
0.480
0.441
0.378
0.391
0.370
0.441
0.483
0.421
0.403
0.389
0.433
0.488
0.442
0.385
0.378
0.466
0.494
0.463
0.441
0.433
0.436
0.529
0.487
0.423
0.438
0.417
0.585
0.494
0.441
0.453
0.427
Panel C. UK V1
λ15
λ115
λ130
λ145
λ160
0.280
0.315
0.373
0.418
0.437
0.268
0.302
0.388
0.403
0.443
Panel D. MK V1
λ15
λ115
λ130
λ145
λ160
0.295
0.309
0.463
0.554
0.634
0.309
0.278
0.376
0.436
0.547
Panel E. FTRK V1
λ15
λ115
λ130
λ145
λ160
0.222
0.267
0.458
0.557
0.665
0.253
0.254
0.373
0.459
0.601
37
Table 17: Noise Model 3 (MA(1)) - Variance of Process 2 (V2) - BIAS.
λ25
λ210
λ215
λ220
λ225
λ230
λ235
λ240
λ245
λ250
λ255
λ260
-0.010
-0.005
-0.009
0.059
-0.065
-0.012
-0.014
-0.013
-0.018
-0.031
-0.022
-0.010
-0.016
-0.013
-0.012
-0.020
-0.019
-0.010
-0.024
-0.016
-0.025
-0.012
-0.012
-0.011
-0.011
-0.001
-0.015
-0.021
-0.160
0.000
-0.017
-0.015
-0.008
-0.007
-0.015
-0.022
0.002
-0.016
-0.025
-0.018
-0.014
-0.009
-0.019
-0.024
-0.010
Panel A. OLS V2 (base scenario)
λ15
λ115
λ130
λ145
λ160
-0.014
-0.014
-0.011
-0.011
-0.014
-0.013
-0.014
-0.013
-0.015
-0.016
-0.108
0.018
-0.024
0.036
-0.024
Panel B. OLS V2 (optimal Q and S)
λ15
λ115
λ130
λ145
λ160
-0.090
-0.092
-0.086
-0.087
-0.091
-0.044
-0.047
-0.050
-0.046
-0.044
-0.039
-0.034
-0.037
-0.035
-0.033
-0.027
-0.026
-0.027
-0.025
-0.032
-0.027
-0.025
-0.022
-0.026
-0.025
-0.029
-0.022
-0.026
-0.022
-0.028
-0.026
-0.027
-0.019
-0.033
-0.023
-0.024
-0.020
-0.020
-0.018
-0.017
-0.009
-0.017
-0.028
-0.027
-0.007
-0.020
-0.017
-0.017
-0.013
-0.018
-0.025
-0.003
-0.018
-0.033
-0.021
-0.016
-0.012
-0.020
-0.026
-0.021
0.102
0.102
0.103
0.100
0.104
0.111
0.113
0.112
0.113
0.110
0.114
0.113
0.117
0.109
0.119
0.113
0.121
0.116
0.122
0.110
0.119
0.124
0.125
0.120
0.125
0.122
0.126
0.129
0.128
0.126
0.147
0.136
0.125
0.125
0.133
0.134
0.139
0.143
0.138
0.142
0.129
0.141
0.137
0.133
0.145
0.142
0.142
0.140
0.130
0.147
0.041
0.088
0.119
0.077
0.064
0.040
0.083
0.136
0.108
0.089
0.037
0.068
0.188
0.140
0.111
0.028
0.060
0.251
0.194
0.116
0.033
0.064
0.106
0.218
0.152
0.019
0.058
0.100
0.243
0.210
0.038
0.050
0.101
0.248
0.188
0.031
0.051
0.091
0.118
0.263
0.023
0.054
0.082
0.101
0.265
0.022
0.055
0.079
0.102
0.229
0.007
0.013
0.008
0.001
-0.003
0.013
0.020
0.011
0.008
0.000
0.011
0.010
0.006
0.008
0.004
0.005
0.004
0.031
0.014
-0.002
0.015
0.013
0.020
0.030
0.001
0.001
0.009
0.010
0.023
0.020
0.020
0.006
0.013
0.019
0.005
0.011
0.006
0.010
0.004
0.044
0.007
0.010
0.010
0.008
0.013
0.005
0.014
0.003
-0.007
0.029
Panel C. UK V2
λ15
λ115
λ130
λ145
λ160
0.092
0.093
0.093
0.090
0.090
0.101
0.097
0.099
0.097
0.097
Panel D. MK V2
λ15
λ115
λ130
λ145
λ160
0.119
0.069
0.040
0.021
0.031
0.051
0.146
0.079
0.069
0.049
Panel E. FTRK V2
λ15
λ115
λ130
λ145
λ160
0.019
0.009
0.006
-0.004
0.012
0.009
0.014
0.009
0.010
0.011
38
Table 18: Noise Model 3 (MA(1)) - Variance of Process 2 (V2) - RMSE.
λ25
λ210
λ215
λ220
λ225
λ230
λ235
λ240
λ245
λ250
λ255
λ260
0.309
0.297
0.292
0.271
0.290
0.297
0.304
0.296
0.303
0.309
0.328
0.321
0.330
0.364
0.321
0.333
0.342
0.322
0.341
0.354
0.336
0.363
0.354
0.541
0.353
0.375
0.408
0.390
0.354
0.338
0.345
0.385
0.344
0.379
0.356
0.380
0.381
0.369
0.357
0.391
Panel A. OLS V2 (base scenario)
λ15
λ115
λ130
λ145
λ160
0.198
0.208
0.200
0.202
0.203
0.241
0.239
0.231
0.228
0.256
0.529
0.319
0.270
0.393
0.269
0.294
0.297
0.313
0.389
0.435
Panel B. OLS V2 (optimal Q and S)
λ15
λ115
λ130
λ145
λ160
0.203
0.209
0.198
0.201
0.206
0.213
0.215
0.208
0.206
0.221
0.260
0.232
0.225
0.236
0.226
0.255
0.252
0.265
0.256
0.240
0.274
0.278
0.264
0.255
0.255
0.278
0.281
0.270
0.276
0.281
0.296
0.284
0.303
0.320
0.297
0.304
0.314
0.293
0.307
0.328
0.304
0.333
0.320
0.299
0.314
0.329
0.346
0.360
0.314
0.299
0.313
0.332
0.304
0.342
0.319
0.345
0.354
0.343
0.326
0.352
0.361
0.337
0.330
0.330
0.330
0.381
0.364
0.390
0.371
0.366
0.393
0.383
0.384
0.369
0.386
0.383
0.397
0.391
0.402
0.376
0.391
0.388
0.396
0.413
0.403
0.387
0.424
0.404
0.406
0.427
0.426
0.440
0.449
0.405
0.417
0.439
0.435
0.453
0.438
0.409
0.420
0.457
0.433
0.447
0.446
0.449
0.436
0.446
0.436
0.446
0.378
0.319
0.396
0.435
0.469
0.434
0.351
0.404
0.432
0.443
0.455
0.381
0.423
0.440
0.448
0.490
0.394
0.466
0.466
0.439
0.524
0.412
0.378
0.485
0.442
0.562
0.458
0.398
0.471
0.493
0.588
0.471
0.433
0.479
0.454
0.589
0.479
0.455
0.401
0.513
0.586
0.508
0.443
0.422
0.504
0.656
0.501
0.436
0.420
0.466
0.370
0.303
0.385
0.464
0.539
0.423
0.350
0.404
0.450
0.488
0.447
0.398
0.409
0.450
0.487
0.492
0.417
0.413
0.467
0.493
0.527
0.425
0.393
0.460
0.474
0.568
0.490
0.435
0.455
0.490
0.601
0.511
0.480
0.478
0.477
0.602
0.528
0.489
0.431
0.525
0.607
0.563
0.508
0.462
0.506
0.683
0.563
0.513
0.489
0.474
Panel C. UK V2
λ15
λ115
λ130
λ145
λ160
0.271
0.272
0.278
0.266
0.276
0.301
0.311
0.311
0.310
0.309
Panel D. MK V2
λ15
λ115
λ130
λ145
λ160
0.279
0.352
0.434
0.507
0.544
0.315
0.360
0.393
0.437
0.495
Panel E. FTRK V2
λ15
λ115
λ130
λ145
λ160
0.235
0.325
0.423
0.527
0.583
0.287
0.315
0.391
0.449
0.550
39