From: AAAI Technical Report WS-96-05. Compilation copyright © 1996, AAAI (www.aaai.org). All rights reserved.
Using Description Logics for Consistency-based Diagnosis
Gerd Kamp
Universit~t Hamburg
Vogt-KSlln-Str.30
22527 Hamburg
kamp@informatik.uni-hamburg.de
Abstract
In this paper weargue that description logics (DL)are well
suited for consistency-based diagnosis. Theyprovide a rich
and expressive representation language,that is able to fulfill
the representation needs. The TBoxcontains the descriptions
of the different componenttypes and the modelsof correct
and faulty behavior. Concrete devices are modeledas a set
of assertions within the ABox.Furthermorethe powerful Tand ABoxinference services such as consistency, object classification 3 and classification can be used for simulation and
diagnosis. Moreover,for certain languages (e.g..ALCY(1)))
sound and complete algorithms for these inferences could be
given(see e.g. [3]).
Using quantitative modelsof simple mechanismsas
an example domain, we show howthe basic principles of consistency-based diagnosis can be implementedusing description logics with expressive
concrete domains. In addition, description logics
provide the inference services necessary to organize and validate modellibraries, an aspect that is
neglected in consistency-baseddiagnosis until now.
Description Logics for Diagnosis
1
Holger Wache
Universit~t Bremen
P.O. Box 330 440
28334 Bremen
wache@informatik.uni-bremen.de
Consistency-baseddiagnosis1 [7; 10] is a methodfor the diagnosis of technical devices basedon descriptions of the correct
and faulty behavior of components.Therefore, for representing, simulating and diagnosingthe simple bike drive train in
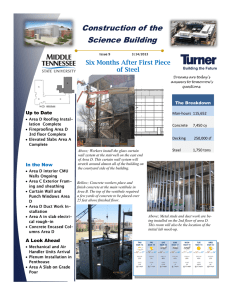
Fig. 1 at least the following knowledgemust be represented
within such a system:
1. The different types of components,e.g. wheels, gearwheels, chains, along with their attributes like force F,
2radius r and torque M.
2. The structure of assemblies, e.g the kinematic structure
of the mechanismsusing kinematic pairs.
3. Physical laws like M= r x F and constraints imposed
on the attributes like F > 0 and r > 0.
4. The normaland faulty behaviors (often called modelsin
consistency-based diagnosis) of componentsand assemblies, e.g. the propagationof torques from one wheelto
another (M1= M2)in a rotational pair.
Basedon this representation diagnosis is mainlythe task of
identifying the modelsof behavior that are consistent with a
set of observed parametervalues. This is most often done by
simulating hypothetized behaviors and comparingthe results
with the observedvalues.
tAlso called model-based
diagnosis
2In this paperweare modeling
these attributes using scalar numericvalues resulting in quantitativemodelsof behavior.Alternatively a qualitative modeling
usingsymbolicvaluesas it is usedin
qualitativephysicsis possible.
---
\\
,---
Figure 1: A simple bike drive train
Despite these facts there are no consistency-baseddiagnostic systemsthat use description logics, at least to our knowledge. The mainreason for this is the lack of expressive concrete domainsin current DLsystems. Since we have to deal
with numericparameter values, we need a description logic
that is able to handle concrete domains.In order to describe
physical laws and behavioral modelswe need at least a concrete domainthat is able to reason with linear systems of inequalities between polynomials4, in the TBoxas well as in
the ABox.
2
Concrete Domains- State of the Art
Baader and Hanschke[1; 3] have shownthat it is theoretically possible to integrate systems of nonlinear polynomi3Alsoknown
as realization.
4M= r x F is a quadratic polynomialbut becomeslinear when
one of the variablesis known.
- 136-
ais into the 1"- and ABoxreasoningservices. Theydevelopeda schemefor integrating concretedomainsinto description languagesandshowed
that the decidabilityof the resulting descriptionlanguage,AgeJr(2)) is preservedfor concrete
domains
that fulfill certain restrictions (so called admissible
concrete domains).
Byusingthe decidabilityof the theoryof the elementary
algebraoverthe reals [11], it caneasily be shown
that systems
of inequationsbetweenarbitrary polynomialsand systemsof
inequalities betweenlinear polynomialsare admissibleconcrete domains[6]. Butwhatis the status of concretedomains
in implementedsystems?
KRSS
providesa concretepart of the domain,specified as
the rationalsandstrings oversomealphabetof size at least 2.
Werestrict our analysis to the numericdomain.
Terms
withinthe concretedomain.Instead, they all rely on the respectiveoperatorsof the abstract domain,resulting in obvious performancehits. Since KRSS
and CLASSIC
only provideandin the abstract domain,it is impossibleto definethe
missingcomparisonoperator < in these systems.
Theonly wayto circumventthe abovelimitations in some
wayis via constructs(satisfies, test-h/c) that allowto include
arbitrary Lisp functions into conceptdescriptions5. Obviously this constructs cannotbe used at all within the TBox
reasoningservices. Thus, the handling of concrete domain
expressionsas a blackbox mayresult in incompleteor wrong
classifications. In Section7 wewill see that classification
basedon concretedomainexpressionsis indeedan interesting TBoxinference. W.r.t. the ABoxreasoning they have
the majordisadvantageof being lisp functionsand not constraints.
All this showsthat current implementations
of description
logics do not provide the mechanisms
weneed in order to
fulfill the representationneedsdescribedin Section1.
aft
I:++;/
(o. ~)
rmulae
(a < #)
e
o
e
®
®
®
(~_<#)
(,~ >#)
Operator
-9~o
(~v ¢)
^~
~e~°n~er
I
Van®)
O
®
®
O
@
@
O
®
¯ explicitly ontained
C)
@ via the abstractdomain
implicitlyexpressible
®
®
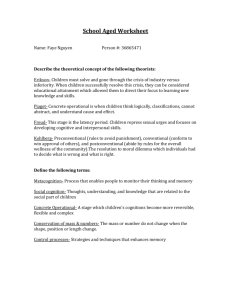
Table1: Expressiveness:LinearSentences
Table1 summarizes
the systems’capabilities to handlesystemsof (in)equations betweenpolynomials.
Thefirst andforemostobservationis the completelack of
anyfunction symbols.Therefore,current terminologicalsystemscan at best handlearbitrary comparisonsbetweenattributes or attributes and numbers.Only LOOM
defines a
relation +, but it cannotbe usedwithinconceptdefinitions.
Thereforeit is impossibleto define eventhe simplestequations betweenunivariatelinear polynomials
like z = y + 1 or
d = 2. r. Notto mentionlinear multivariatepolynomials
like
u = 2. (l + w) or nonlinear polynomialslike M= F.
KRSS and CLASSIC show another notable limitation. Unlike the other systemsthey provideonly > and< as comparison operators,andonetermof the equationis restricted to be
a constant. This makesit evenimpossibleto define a square
as a speeiai rectanglewith I = w.Onehas to use the abstract
equality predicate equalin order to describethis. Furthermore,no systemimplements
logical operatorsor quantifiers
3 Expressive concrete domains
Thereare two possibilities for implementing
the concrete
domainextension of a terminological system: providing a
6genericinterface to algorithmsrealizing a concretedomain
or hardwiringthe integration of specific algorithms7. A
genericinterface makesit easy to providemultipleconcrete
domains,resulting in a modularsystemarchitecture. Thus
onecan select the properalgorithmsneededto fulfill the requirementsof the specific application, andcouplethemwith
the descriptionlogic throughthe genericconcretedomaininterface.
For example,a large numberof algorithmsfor solvingsystemsof algebraic (in)equationsare andhavebeendeveloped.
Furthermore,a couple of this algorithmshave beenincorporated into CLP(R)-systems
(e.g. [5]). Using a CLP(R)systemas the concrete domainsolver, weparticipate from
the progressmadein this area throughsimplyexchanging
the
CLP(7~)-system
at the interface.
3.1 Concrete predicates
Thus, we implementedCTL[6], a system based on TAXON
andthe description logic A£g~(7))whichrealizes a generic
concrete domaininterface. CTLimplementsthe KRSS
syntax, whichwe had to be extended in the following way
(for details see [6]): Predicateterms P describe concrete
predicates. Theyare either a predicate namePNor a list
((namer)(x~ x,~)(exprv)) consisting of a dom
ain identifier (namer)and a list of variables zl... zn. The expression (exprv)actually definesthe concretepredicate. (define5 KRSS, LOOM,and CLASSICprovide such constructs.
~Thisis mainlythe taskof decidingff a finite conjunction
of
concretedomain
expressions
is satisfiable.
7The built-in
concrete domains
in CLASSIC, LOOMand KRIS
are more
or less examples
for this hardwiredintegration.
- 137-
constraint PNP) assigns a namePNto a predicate term
P. Further (constrain RI ... R,P) is an additional concept term operator with the followingsemantics:(constrain
nt ... R,,P) z -- {a 13bl,...,bn((a, bl) E n~ A...
(a, bn) E RznA (bl,..., bn) e pZ)}.
Since CTLis basedon the plain tableaux calculus using
the rules describedin [3] only the respectiveconcretedomain
roles hadbe implemented
appropriatelyin order to realize the
generic concretedomaininterface.
Since/~is a list of the admissiblevalues for eachparameter, the computed
restrictions can thenbe deliveredtogether
with the generatedmodel.
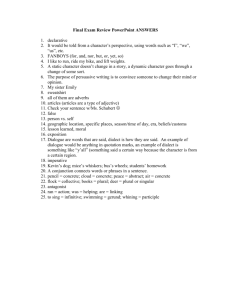
4 Representation
As wehaveseen in Section I, wemustbe able to describe
the different componenttypes of a mechanism
as well the
kinematicstructure. In kinematicsthis is normallydonewith
links andkinematicpairs [9]. In order to describethe drive
3.2 Generating models and computing parameter
train of Fig.l, it is sufficient to definerotational links and
restrictions
tensionlinks as specializationsof generallinks. ThetermiDescription logic systemsbased on a tableaux methodexnologyin Fig.2a defines a link as somethingthat carries a
plicitly generatea modelin the courseof the consistency
test.
force: llnk.foree. Rotationallinks (rotational-link)are links
Normally
only the result of the consistencytest is presented that in additionhaveattributes for a radius(rot.radius) and
to the user andthe constructedmodelis moreor less thrown torque(rot.torque).link.forceandrot.torqueare not negative,
away.In technical domainsand especially in our applicarot.radiusis strictly positive, andthe torqueis the productof
tion (but also e.g. in configuration)the calculatedmodel
radius andappliedforce. Finally wedefine a number
of addithe mainobject of interest. Thereforewerealized a function tional links suchas wheel,vhalnetc. withoutfurther specify(show-model)
within CTLthat returns the modelMfor a con- ing them.
sistent ABox.
In order to describe the structure of a mechanism,
kineThis schemacan be extendedto concretedomainsby using matic pairs are used. Aklnematle-palrdescribesthe connecquantifier eliminationtechniquesfromcomputeralgebras. A rionbetween
twolinks palr.llnkl andpalr.llnk2. Depending
on
subtaskof the consistencytest for an ABox,is testing whether the degreesof freedomof the relative motionof the links and
a conjunction
of concretepredicatesis satisfiable, i.e. check- the type of connectiondifferent types of pairs can be idening whetherthe sentenceS = 3xl ...qxk(pl A ... A Pn) is
tified. In the terminologyshownin Fig.2bwerestrict us to
true. Tarskisbasic idea for decidingthe theory of the elethe descriptionof pairs between
tworotational-links(rot-pair)
mentaryalgebra wasto transforman arbitrary sentenceinto
andpairs between
onerotatlonal-linkandonetenslon-llnk(rotan equivalentquantifier free oneS [11]. Thevalidity of this
tension-pair). Notethat weare able to describerot-tensionsentenceis then easy to check. Overthe years quantifier
pair via an or construct. In addition to the component
types
eliminationtechniqueshavebeenvasty improved,moreeffiandthe structure of the device,descriptionsof the correct as
cient generalalgorithmshavebeendevised(e.g. Cylindrical wellas the differentfaulty behaviormodelsare neededfor the
Algebraic Decomposition(CAD)[2]) and further improved consistency-based
diagnosisas well as the simulationof the
(e.g. PCAD
[4]) and specialized algorithmsfor subsets
device. Theterminologyin Fig.2c describesthe correct bethe theory have been found and realized. MostCLP(7~)- havior of rotational-palmandrot-tension-palm.Whereasthe
systemsmakeuse of the Fourier-Motzkin
algorithmfor quan- torqueis propagated
in ok-rot-pair,ok-rot-tension-pairproparifler eliminationoverlinear systemsof inequalities(see e.g.
gatesthe force.
[8]).
The terminologyin Fig.2d showssomeexemplaryfaulty
Besidescheckingthe validity of a sentence, quantifier
behaviorsof a rotational pair. Apair is slipping (slippingelimination as a generic methodcan be used to computethe
rot-pair) if bothtorquesare strictly positiveanddifferent.
restrictions imposedon the parametersof the modelM:
pair is broken(broken-rot-pair)if onetorqueis strictly positive, the other zero. Aseconddevelopermightdistinguish
1. Let X= z~,..., z,~ a list of parametersin M.
betweenstrong andweakslipping pairs (strong-slipping-rot2. Forzi EX
pair resp. weak-slipping-rot-pair)
as it is depictedin Fig.2e.
(a) Eliminateall quantiflersbut z~ fromS. I.e. transNotethat in our languageit is possibleto describethe weak
formS into a sentence Si = 3xiRi, Ri quantifier
slipping pair as the negationof a strong one. Thisallowsfor
free.
a simpledescriptionof a weakslipping pair, andreducesthe
sourcesof possiblefaults. It furthereasesthe modification
of
S~in disjunctivenormalform,i.e. trans(b) Transform
the knowledge
base, e.g. a changeof the limit betweenstrong
formSi into S~ = dnf(S~).
and weakslipping.
(c) Collectthe matrixR~of g~.
3. Returnthe list R = R1,... Rn of collectedmatricesR~.
Sthi$is calledvariableelimination
or projection
in the field of
CLP(~)
5 Simulation
Simulationis basedon the followingprocedure:
- 138-
Figure 2: TheKrss code
1. Descriptionof the device:Instantiating,relating the instancesto primitiveconceptsandbuildingup the device
structureby relating the instances.
2. Determination
of the modelsof behaviorfor the different
deviceparts.
3. Assertionof someparameterrestrictions.
4. Checkingthe consistency of the ABox.Thevalues and
restrictions of additionalparametersare calculatedduring the model-generatingprocess. Furthermore,additional instances maybe generated.
5. Presentation of the generatedmodeland parameterrestrictions. Eventuallybacktracking
in order to calculate
another model.
It is clear that the assertion of behaviormodelsandparameterrestrictions canbe freely intermixed.In addition,the
consistencytest andtherefore the modelgenerationcan be
triggered after every step. In the followingwewill give a
brief overviewhowsimulationworks, using the drive train
depictedin Fig.1. First the structure of the drive train has
to be described:Instanceshaveto be instantiated, primitive
conceptsfor this instances mustbe given andthe links and
the kinematicpairs mustbe related (Fig.2f).
In a secondstep (Fig.2g)wegive the valuesof the radii
the crankarm-1,
chainrlng-1,sprocket-1
andrear-wheel-1
and
the force that is appliedto the crankarm
as starting 9.
values
Wethen state that all components
exposetheir normalbehavior. Finally,wegivea valuefor the force appliedto orankarm1. Nowthe values for nearly all missingparametervalues
can be calculated(see Figure3). W.r.t. the bottom-bracketspindle-1 and the roar-axle-1 0 could be excludedfromthe
admissiblerangesof the respectiveforces(since the force appliedto the erankarm
is strictly positive). It is not surprising
9The values are given in Meter and Newton
that nofurther restriction is possible,giventhe fact that no
radius is givenfor these links. Neverthelessthe propagation
of the respectivetorquesto their adjoininglinks is possible
dueto the lawof torquethat holdsfor intact rotation-pairs.
Figure3: Thegeneratedmodelandparameterrestrictions
Arbitraryother parameterrestrictions as well as an arbitrary selectionof behaviorsare possible,but dueto the lack
of space wecan give no further examples.
6 Diagnosis
Diagnosisis supportedin the followingway:
1. Descriptionof the structure of the device.
2. Assertion of the observed parameter values and
(re)realization of the affected components.
This gives
an upperboundfor the behaviorsthat are consistentwith
the observedvalues.
Weak
realization in additiongives a lowerboundfor the
.
possible modelsof behaviorand therefore hints which
parametervalues shouldbe determinednext. This values
are thanasserted, the components
(re)realizedetc.
- 139-
in CTL,wecan guaranteethat all missingandaccidentalsubWeillustrate this method,usinga single rotational-pairas
an example.First Fig.2h showshowto describe a rotational
sumption
relations in the modellibrary are detected.
pair within the ABox.Fig.2i then showshowdifferent sets
8 Summary and outlook
of parametervalueslead to different diagnoses.Whilein the
first variant identic torquevalueslead to ok-rot-pair, giving Descriptionlogics with expressiveconcretedomainsare well
a zero value for the torque of onelink and a non-zerovalue suited for consistency-baseddiagnosis and simulation of
for the for force of the other link suffice to recognizeit as
technical devices. Additionallythey providethe inferences
a broken-rot-pair.Thisis possiblebecausethe radius is rethat are neededin order to organizeandmaintainlarge model
stricted to be strictly positive. Usingthe physicallawit can libraries. Actualworkfocuseson interfacing to a computer
be concluded
that the torqueof the secondlink is strictly posi- algebrasystemfor quantifier eliminationover quadraticsentive whichleads to the recognitionas a broken-rot-pair.
In the
tences [12]. Further workconcentrateson concrete domains
third variant the pair is realizedas a weak-slipping-rot-pair,over other base types, e.g. using CLP(FD)
systemsfor dedueto thecalculated
ratio of thetorques.
scribing qualitative models.Finally, weexplore other applicationareas suchas configurationandintelligent retrieval
fromparts catalogsetc.
7 Model Libraries
Fig.4 showsthe concepthierarchyafter classification of the
References
aboveterminologies.In this section wewill showhowclassification can be used for the organizationand maintenance [1] F. Baader and E Hanschke.A Schemefor Integrating
Concrete Domainsinto ConceptLanguages.Research
of modellibraries. Thefollowingobservationsare important
Report, DFKI,Kaiserslautern, Germany,
1991.
w.r.t this aspect:
[2] G.E. Collins. Quantifier Eliminationfor Real Closed
Fields by Cylindrical Algebraic Decomposition.In
Proc. of the SecondGI Conferenceon AutomataThepry and FormalLanguages,Springer, 1975.
[3] P. Hanschke.A DeclarativeIntegration of Terminological, Constraint-Based,Data-driven,and Goal-directed
Reasoning.Dissertation, Kaiserslautern,1993.
[4] H. Hong.RISC-CLP(Real):
Constraint Logic ProgramFigure4: Theclassified TBox
mingover the real numbers.In Constraint LogicProgramming:
Selected Research.MITPress, 1993.
All conceptdefinitions are different frombottom.There[5] JoxanJaffar, Spire Michaylov,Peter J. Stuckey, and
fore all definitions are satisfiable. This guaranteesthat no
RolandH. C. Yap. The CLP(R)Languageand System.
modelof behavioris mistakenlydefinedin a waythat there
Technicalreport, 1987.
exists no parametercombination
that leads to this behavior.
All conceptdefinitions are distinct fromeachother. This [6] Gerd Kampand Holger Wache.CTL- a description
logic with expressiveconcrete domains.Technicalremeansthat there are no twomodelsof behaviorthat are equivport, LKI,1996.
alent, somethingthat could easily happenwhentwo model
[7] J. de Kleer and B. Williams. DiagnosingMultiple
libraries are merged.
Faults. Artificial Intelligence,32, 1987.
Thestrong and weakslipping pairs in Fig.2e are modeled
as specializationsof rot-pair andnot of slipping-rot-pair.Sit[8] Jean-Louis Lassez. Parametric queries, linear conuationslike this are verylikely if differentpeopleare simulstraints and variable elimination. In Prec. DISCO-90
taneouslydevelopingmodelsof behavior, or whenthe model
1990.
librat’ies are complex.
Theclassificationservicedetectedthe
F.
Reuleaux.TheKinematicsof machinery- outlines of
[9]
missingsubsumptionrelation betweenslipping-rot-pairand
a theory of machines.Macmillan
& Co,, 1876.
strong-sUpping-rot-pair.
In othersituationsit may
bethecase
P.
Struss
and
O.
Dressier.
Physical
Negation- Integrat[10]
that a computed
subsumption
relation is not missingbut acing
Fault
Models
into
the
General
Diagnostic
Engine.In
cidentalin a sensethat it is causedbysomeerror or laxness
Prec.
IJCAI-89,
1989.
in the descriptionof the modelsof behavior.SuchErrors are
very likely in large and complexmodellibraries. Therefore [11] A. Tarski. A DecisionMethodfor ElementaryAlgebra
andGeometry.In CollectedWorksof A. Tarski.
the detectionof these errors is crucial for the development
of
1°
suchlibraries. Sinceall inferencesare soundandcomplete
[12] VolkerWeispfenning.ApplyingQuantifier Elimination
to Problemsin Simulationand optimization.Technical
1°atleast for linearsystems
of inequalities
in ourcurrentimpleReport,UniversitatPassau,1996.
rnentation
- 140-