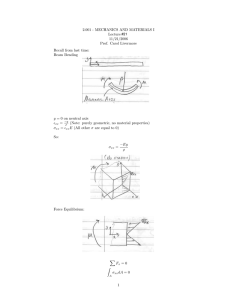
2.001 - MECHANICS AND MATERIALS I Lecture 12/4/2006 Prof. Carol Livermore
advertisement

2.001 - MECHANICS AND MATERIALS I Lecture #24 12/4/2006 Prof. Carol Livermore Torsion (Twisting) Mxx = Mt Examples where torsion is important: - Screwdriver - Drills - Propellers Use superposition Example: Unifrom along length, has circular symmetry 1 ϕ(x) = Angle of Twist (Total) at Point x (Built Up) Compatibility: d = ϕ(x + dx)R − ϕ(x)R d = γdx So: γdx = ϕ(x + dx)R − ϕ(x)R γdx = dϕR dγ γ=R dx What is γ? So: γ = γrθ Shear Strain Thus: γrθ = R 2 dϕ dx And: γ R dϕ = 2 2 dx θx = rr = θθ = xx = rθ = rx = 0 Constitutive Relations: σθx = 2Gθx = Gγxθ = Gr dϕ , where G is the shear modulus. dx E 2(1 + ν) G= σxx = σθθ = σrr = σrθ = σrx = 0 σθx = Gr Recall beam bending σxx = dϕ dx −Ey ρ . Equilibrium: Mx = 0 rdF = 0 −Mt + A dF = σθx dA rσθx dA = 0 −Mt + A Mt = rGr A 3 dϕ dA dx Mt = dϕ dx Gr2 dA A Recall beam bending: M= 1 ρ Ey 2 dA A Note: dϕ happens dx : what 2 Gr dA: effective stiffness A Mt : what we apply If G is constant ”Special Case” Mt = J≡ dϕ G dx r2 dA A r2 dA Polar Moment of Inertia A So for ”special case” G is constant. Mt = GJ dϕ dx Recall beam bending: M= EI ρ If G is not constant: (GJ)ef f = Gr2 dA A When G is constant: Mt = GJ dϕ dϕ and generally σθx = Gr dx dx Mt σθx = GJ Gr So: σθx = 4 Mt r J Example for J 1. Cicular solid shaft r2 dA J= 2π R = 0 A 2π = 0 0 4 r2 rdrdθ R dθ 4 π 4 R 2 J= 2. Hollow circular shaft J= 2π 0 R2 r3 drdθ R1 π 4 4 J= R2 − R1 2 (GJ)composite = = (GJ)inside + (GJ)outside G1 πR14 G1 π 4 R2 − R14 + 2 2 Or: (GJ)ef f = 0 2π R1 0 3 R2 G1 r dr + G2 r dr dθ 3 R1 Note: Due to powers of order 4, material buys you more stiffness on the outside than the inside. 5 So why don’t we make R huge? Now look at it at 45◦ It will fail in compression and it will buckle. What is the total angle of twist? For one material (constant G) Mt = GJ So: 6 dϕ dx dϕ Mt = dx GJ ϕ(x) = Mt x + c1 GJ Boundary Condition: At x = 0, ϕ(0) = 0 ⇒ c1 = 0. So: ϕ(x) = Mt x GJ φ(L) = Mt L GJ The total angle of twist φ(L) 7