Lecture 3 - 2003
advertisement

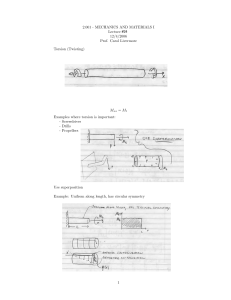
Lecture 3 - 2003 Kollbruner Section 5.2 Characteristics of Thin Walled Sections and .. Kollbruner Section 5.3 Bending without Twist thin walled => (cross section shape arbitrary and thickness can vary) axial stresses and shear stress along center of wall govern normal (to curved cross section) stress neglected position determined by curvelinear coordinate s along center line of cross section St. Venant torsion not a player as K ~ t^3 y, η use shear flow: z => ζ x => ξ z, ζ a) equilibrium of wall element: x σ τ = τ xs = τ sx ds dx q s x t q + dq/ds*ds σ + dσ dx*dx στ σ + d σ ⋅dx ⋅t⋅ds − σ⋅t⋅ds + dx q + d q⋅ ds ⋅dx − q⋅ dx = 0 ds using q = τ ⋅t as it includes τ(s) and t(s) d d q + σ ⋅t = 0 ds dx 1 notes_12_bending_wo_twist.mcd s ds ← → ↓ ↑ ↔ b) compatibility (shear strain) du/ds ↑ du/ds*ds=du d d u+ v=γ ds dx dx dv/dx v is displacement in s direction u is displacement in x direction ↔ → ←↓ dv/dx*dx=dv x view looking ⊥ to surface c) tangential displacement (δv) in terms of η, ζ and φ v is displacement in s direction η is displacement in y direction ζ is displacement in z direction and φ is rotation all at point s on cross section. α dv dη dv α dζ δ v is differential over distance dx δη is component of δv in y δζ is component of δv in z direction direction and hp*δφ is component due to differential rotation between x and x+dx z component y component hp*dφ dφ p dφ hp . dv superposition => rotation component dv = dη⋅ cos( α ) + dζ⋅ sin( α ) + hp⋅ dφ η, ζ and φ depend on s and x while α and hp are independent of x (prismatic section) rewrite as: 2 notes_12_bending_wo_twist.mcd δv δx = δη δx ⋅cos( α ) + δζ δx ⋅sin( α ) + hp⋅ δφ δx further assumptions: 1) preservation of cross section shape => ζ = ζ(x); η = η(x) φ = φ(x) d d 2) shear though finite is small ~ 0 => u = − v ds dx δu axial stress 3) Hooke's law holds => σ = E⋅ δx equilibrium for the cross section: ⌠ σ dA = Nx ⌡ ⌠ σ⋅y dA = −M z ⌡ Nx = axial force Mz and My are bending moments wrt y and z respectively note integral expressions Tp is torsional moment wrt cross sectional point P Qx and Qy shear forces ⌠ σ⋅z dA = M y ⌡ ⌠ τ⋅h dA = p ⌡ ⌠ q⋅ h ds = T p p ⌡ ⌠ ⌠ τ⋅cos( α ) dA = q⋅cos( α ) ds = Vy ⌡ ⌡ ⌠ ⌠ τ⋅sin( α ) dA = q⋅sin( α ) ds = Vz ⌡ ⌡ 5.3 Bending without twist ⌠ σ dA = 0 ⌡ ⌠ q⋅ h ds = 0 p ⌡ 3 possible only if lateral loads pass through P notes_12_bending_wo_twist.mcd δv = δx using δη δx ⋅cos( α ) + δζ δx ⋅sin( α ) + hp⋅ δφ δx from above, δφ d d =0 u = − v with no twist => δx ds dx becomes: δu δs =− dη dx ⋅cos( α ) − dζ dx ⋅sin( α ) which can be integrated to become: ⌠ ⌠ dζ = ζ' (prime is control F7) u = −η'⋅ cos( α ) ds − ζ'⋅ sin( α ) ds + u0( x) where dx ⌡ ⌡ and δη δx is η', and comes outside the integral due to our prismatic assumption dY (=dy) =ds*cos(α), dZ (=dz) =ds*sin(α), dz where Y and Z refer to a coordinate system with an arbitrary origin, whereas x and y are defined centroidal (refer to center of area) => α ⌠ ⌠ u( x) = −η'⋅ 1 dY − ζ'⋅ 1 dZ + u0( x) ⌡ ⌡ y,η dy ds z,ζ u = −η'⋅Y − ζ' ⋅ Z + u0( x) which says longitudinal displacement u is distributed linearly across cross section (plane sections remain plane) u0 is the constant of integration which is f(x) axial strain = du/dx => u' = −η''⋅Y − −ζ''⋅Z + u'0( z) and σ = E⋅ u' = −E⋅ η''⋅Y − ζ''⋅Z + E⋅ u'0( z) ⌠ now with σ dA = 0 ⌡ ⌠ ⌠ ⌠ ⌠ σ dA = E⋅ u' da = − E⋅η''⋅Y dA − E⋅ζ''⋅Z dA + ⌡ ⌡ ⌡ ⌡ ⌠ ⌠ ⌠ −E⋅ η''⋅ Y dA − E⋅ζ''⋅ Z dA + E⋅ u'0( z)⋅ 1 dA = 0 ⌡ ⌡ ⌡ 4 ⌠ E⋅ u' ( z) dA = 0 0 ⌡ => => notes_12_bending_wo_twist.mcd E⋅ u'0( z) = E⋅η''⋅ ⌠ Y dA ⌡ A ⌠ + E⋅ζ''⋅ Z dA ⌡ σ = −E⋅ η''⋅Y − −E⋅ ζ''⋅Z + E⋅η''⋅ ⌠ Y dA ⌡ A + E⋅ζ''⋅ determines E⋅ u'0( z) in stress σ => ⌠ Z dA ⌡ A ⌠ ⌠ Y dA Z dA ⌡ ⌡ σ = −E⋅ η''⋅ Y − − −E⋅ ζ''⋅ Z − A A ⌠ Y dA ⌡ A y=Y− but ............. is the definition of the y position of the centroid and ⌠ Y dA ⌡ A and z=Z− rearranged becomes ⌠ Z dA ⌡ ⌠ Z dA ⌡ A the z position => and σ = −E⋅ η''⋅y − E⋅ζ''⋅z A where y and z are the position of the point s in the centroidal coordinate system. η'' and ζ'' are determined by the equilibrium conditions ⌠ σ⋅y dA = −M z ⌡ ⌠ ⌠ σ⋅y dA = ⌡ ⌡ ⌠ σ⋅z dA = M y ⌡ σ = −E⋅ η''⋅y − E⋅ζ''⋅z ⌠ ⌠ y ⋅ y dA ⋅ −E⋅ζ''⋅ z⋅ y dA = −M z ⌡ ⌡ (−E⋅ η''⋅y − E⋅ζ''⋅z) ⋅y dA = −E⋅ η''⋅ 5 notes_12_bending_wo_twist.mcd ⌠ ⌠ σ⋅z dA = ⌡ ⌡ ⌠ ⌠ y ⋅ z dA − E⋅ζ'' z⋅ z dA = M y ⌡ ⌡ ( −E⋅ η''⋅y − E⋅ζ''⋅z)⋅z dA = −E⋅ η'' ⌠ ⌠ ⌠ noting that z⋅ z dA = Iy , z⋅ y dA = Iyz and y ⋅ y dA = Iz and solving the two ⌡ ⌡ ⌡ equations for two unknowns E⋅η'' and E⋅ζ'' leads to => Given −Eη''⋅Iz − Eζ''⋅Iyz = −M z solving two equations two unknowns −Eη''⋅Iyz − Eζ''⋅Iy = M y Iyz⋅My + Mz⋅Iy −I 2 + I ⋅I yz y z Find( Eη'' , Eζ'') → −Iyz⋅Mz − My⋅Iz −Iyz2 + Iy⋅Iz Eη'' := (Iyz⋅My + Mz⋅Iy) Eζ'' := −I 2 + I ⋅II y z yz (−Iyz⋅Mz − My⋅Iz) −I 2 + I ⋅I y z yz reversed signs now substituting back into the relation for axial stress ( σ := −E⋅ η''⋅y − E⋅ζ''⋅ z ) => σ := −Eη''⋅ y − Eζ''⋅ z σ→ ( − Iyz⋅M y + M z⋅Iy 2 ) ⋅y − −Iyz + Iy ⋅Iz or ....... rearranging in terms of My and Mz => −Iyz⋅M z − M y ⋅Iz 2 ⋅z −Iyz + Iy ⋅Iz σ := My (−Iy⋅y + Iyz⋅z)⋅Mz + (Iz⋅z − Iyz⋅y)⋅M −I 2 + I ⋅I y z yz 6 notes_12_bending_wo_twist.mcd as a check on this development let: Iyz := 0 and σ→ −M z Iz σ := ⋅y + My Iy ⋅z ( − Iyz⋅M y + M z⋅Iy −I 2 + I ⋅I y z yz integration of s q1( x) = 0 ( (−Iyz⋅Mz − My⋅Iz) −I 2 + I ⋅I y z yz ⋅zz d d q + σ ⋅t = 0 (the equilibrium relationship above) along s leads to : ds dx where q1( x) is f(x) and represents the shear flow at the start of the region. it is 0 at a stress free boundary which is convenient for an open section: d σ ⋅t ds dx 0 ⋅y − which matches our previous understanding on bending c) Shear Stress ⌠ q( s, x) = q1( x) − ⌡ ) ) ( ) −Iyz⋅M z − M y ⋅Iz d − Iyz⋅M y + M z⋅Iy d σ = ⋅y − ⋅z dx 2 2 dx −Iyz + Iy ⋅Iz −Iyz + Iy ⋅Iz Vz+dVz/dx*dx Vz where only My and Mz are x dependent and d d M z = Vy and M y = −Vz => dx dx y x My+dMy/dx*dx My Vy Mz z M z( x) := Vy ⋅x d dx M y ( x) := −V Vz⋅x ( − Iyz⋅M y ( x) + M z( x)⋅Iy −I 2 + I ⋅I y z yz ) ⋅y − Vy+dVy/dx*dx x Mz+dMz/dx*dx Iyz := Iyz (−Iyz⋅Mz(x) − My( x)⋅Iz) −I 2 + I ⋅I y z yz Iyz⋅Vz − Vy ⋅Iy −Iyz + Iy ⋅Iz ⋅z → 2 ⋅y − −Iyz⋅Vy + Vz⋅Iz 2 ⋅z −Iyz + Iy ⋅Iz copy and substitute ⌠ q( s, x) = − ⌡ s 0 q( s, x) = s ⌠ d σ ⋅t ds = − ( Iyz⋅Vz − Vy⋅Iy ) ⋅y − ( −Iyz⋅Vy + Vz⋅Iz) ⋅z ⋅t ds dx 2 −I 2 + I ⋅I −Iyz + Iy ⋅Iz y z yz ⌡ 0 −1 2 −Iyz + Iy ⋅Iz ⌠ ⌠ ⋅ Iyz⋅Vz − Vy ⋅Iy ⋅ y ⋅ t ds − −Iyz⋅Vy + Vz⋅Iz ⋅ z⋅ t ds ⌡ ⌡ ( ) s ( 0 7 ) s 0 notes_12_bending_wo_twist.mcd if we designate the integrals which are the static moments of the cross section area: Qy and Qz: s s ⌠ Qz = y ⋅ t ds ⌡ ⌠ Qy = z⋅ t ds ⌡ 0 −1 q( s, x) := 2 −Iyz + Iy ⋅Iz 0 ( q( s, x) collect , Vy , Vz → q( s, x) := ) ( −1 2 −Iyz + Iy ⋅Iz ( ) ⋅ −Iy ⋅Qz + Iyz⋅Qy ⋅Vy − or rearranging as we did for axial stress 1 2 −Iyz + Iy ⋅Iz ( ) ⋅ Iyz⋅Qz − Iz⋅Qy ⋅Vz −1 ⋅ ( Iyz⋅Qz − Iz⋅Qy ) ⋅Vz + ( −Iy ⋅Qz + Iyz⋅Qy ) ⋅V Vy −I 2 + I ⋅I yz y z or if the axes are principal (Ixy = 0) q( s, x) := ) ⋅ Iyz⋅Vz − Vy ⋅Iy ⋅Qz − −Iyz⋅Vy + Vz⋅Iz ⋅Q Qy Iyz := 0 −1 ⋅ ( Iyz⋅Qz − Iz⋅Qy ) ⋅Vz + ( −Iy ⋅Qz + Iyz⋅Qy ) ⋅V Vy −I 2 + I ⋅I yz y z Vy Vz q( s, x) simplify collect , Qy → ⋅Qy + Qz⋅ Iz Iy q( s, x) := Qy⋅Vz Qz⋅Vy + Iz Iy Iyz := 0 d) Shear Center the above relationships apply for bending without twist i.e. when ⌠ σ dA = 0 ⌡ q→ −1 2 −Izy + Iy ⋅Iz ⌠ q⋅ h ds = 0 p ⌡ ( ) ( possible only if lateral loads pass through P ) ⋅ Izy⋅Qz − Iz⋅Qy ⋅Vz + −Iy ⋅Qz + Izy⋅Qy ⋅Vy 8 from above (reset in hidden area notes_12_bending_wo_twist.mcd this point P was designated (by Maillart in 1921, see page 106 Kollbrunner) as the shear center. In the centroidal coordinate system, this is located at yD and zD. the second condition applies for a shear force V. The center of action must pass through P. Divide Q into components Vy and Vz y thus from (Qy), the moment the moment equilibrium wrt C (in centroidal coordinates) is: q ⌠ q V ⋅h ds + V ⋅z = 0 y D y c ⌡ ( ) Vy ⌠ q V ⋅h ds = −V ⋅z y D y c ⌡ ( ) ( ) q Vy set reset −1 2 −Izy + Iy ⋅Iz q := ( zD = ⋅ ( Iyz⋅Qz − Iz⋅Qy ) ⋅Vz + ( −Iy ⋅Qz + Iyz⋅Qy ) ⋅V Vy −I 2 + I ⋅I yz y z ) ⌠ 2 −I + I ⋅I ⌡ y z zy −Vy substitute −1 ( ) −Vy ⋅zD = −1 ⋅ −Iy ⋅Qz + Izy⋅Qy ⋅Vy ⌠ ⌠ q V ⋅h ds = −V ⋅z = y D y c ⌡ ⌡ −I 2 + I ⋅I y z zy ( ( moment from V.z ) ⋅ −Iy ⋅Qz + Izy⋅Qy ⋅Vy ⋅hc ds −Iy ⋅Qz + Izy⋅Qy ⋅hc ds ) ⌠ ⋅ −Iy ⋅Qz + Izy⋅Qy ⋅hc ds = −I 2 + I ⋅I ⌡ y z zy 1 yD,zD z is q with Vz set to 0 and hc is perpendicular distance from centroid to line of action (i.e. y(s) and z(s)). Vz := 0 q→ Vz hC ( ) ⌠ ⌠ −Iy ⋅ Qz⋅hc ds + Izy⋅ Qy ⋅hc ds ⌡ ⌡ ⌠ q V ⋅h ds − V ⋅y = 0 z D z c ⌡ ( ) 9 or ... 2 −Izy + Iy ⋅Iz ⌠ q V ⋅h ds = V ⋅y z D z c ⌡ ( ) notes_12_bending_wo_twist.mcd ( ) is q with Vy set to 0 and hc is perpendicular distance from centroid to line of action (i.e. y(s) and z(s)). q Vz reset reset set Vz := Vz −1 q→ 2 −Izy + Iy ⋅Iz ( ) ( ) yD = q := ⋅ Izy⋅Qz − Iz⋅Qy ⋅Vz ⌠ ⌠ q V ⋅h ds = V ⋅y = z D z c ⌡ ⌡ ⌠ Vz⋅y D = ⌡ Vy := 0 −1 −I 2 + I ⋅I y z zy −1 −I 2 + I ⋅I y z zy ( −1 ⋅ ( Iyz⋅Qz − Iz⋅Q Qy ) ⋅Vz + ( −Iy ⋅Qz + Iyz⋅Qy ) ⋅Vy −I 2 + I ⋅I yz y z substitute ( ) ⋅ Izy⋅Qz − Iz⋅Qy ⋅Vz⋅hc ds ) ⋅ Izy⋅Qz − Iz⋅Qy ⋅Vz⋅hc ds = ⌠ ⌠ ⋅ Izy⋅ Qz⋅hc ds − Iz⋅ Qy ⋅hc ds −I 2 + I ⋅I ⌡ ⌡ y z zy −Vz ⌠ ⌠ ⋅ Izy⋅ Qz⋅hc ds − Iz⋅ Qy ⋅hc ds −I 2 + I ⋅I ⌡ ⌡ y z zy −1 for principal axes (Iyz = 0): Izy := 0 ⌠ ⌠ y D := ⋅ Izy⋅ Qz⋅hc ds − Iz⋅ Qy ⋅hc ds −I 2 + I ⋅I ⌡ ⌡ zy y z −1 yD = ⌠ Q ⋅h ds y c ⌡ zD := zD = Iy 10 ⌠ ⌠ −Iy ⋅ Qz⋅hc ds + Izy⋅ Qy ⋅hc ds ⌡ ⌡ 2 −Izy + Iy ⋅IIz ⌠ − Qz⋅hc ds ⌡ Iz notes_12_bending_wo_twist.mcd