A Multiagent Fuzzy-Logic-Based Energy Management of Hybrid Systems Senior Member, IEEE

2123 IEEE TRANSACTIONS ON INDUSTRY APPLICATIONS, VOL. 45, NO. 6, NOVEMBER/DECEMBER 2009
A Multiagent Fuzzy-Logic-Based Energy
Management of Hybrid Systems
Jérémy Lagorse, Marcelo G. Simões, Senior Member, IEEE , and Abdellatif Miraoui
Abstract —Hybrid energy systems (HESs) for renewable energy sources are an interesting solution to power stand-alone systems.
However, the energy management of such systems is quite complex when it relies on a central controller. With a central controller, the energy management system (EMS) has to be redesigned when the configuration is changed (for example, with the addition of a new device). This paper proposes a distributed EMS to control the energy flow in the HES. This distributed controller is based on multiagent-system (MAS) technology. With this concept, a HES is seen as a collection of different elements that collaborate to reach a global coordination. The agent approach for HES is explained, and a MAS is presented. Finally, a simulation model of the HES controlled by a MAS is proposed, and the system reaction is detailed.
Index Terms —Cooperative systems, energy management, fuzzy logic, hybrid systems.
I. I NTRODUCTION
T HE WORLDWIDE community has recognized the issues of global warming, and renewable energy is a promising solution to reduce greenhouse emissions. The use of renewable energy sources presents a tremendous potential for many applications, and particularly, off-grid stand-alone systems have many benefits. Powering remote sites with renewable sources implies the use of storage devices due to the fluctuating nature of the power production. Furthermore, back-up sources, like for instance diesel engines or fuel cells (FCs), are often added to the system in order to increase the reliability of the stand-alone systems. The complete system is called a hybrid energy system
(HES), since it associates at least one renewable source plus one additional source and one storage element.
To control the power flow among the elements consisting a
HES, a suitable energy management system (EMS) must be designed. The EMS is usually a central controller that drives all the elements. Thus, the complexity in designing an EMS
Paper ICPSD-09-41, presented at the 2008 Industry Applications Society
Annual Meeting, Edmonton, AB, Canada, October 5–9, and approved for publication in the IEEE T RANSACTIONS ON I NDUSTRY A PPLICATIONS by the Energy Systems Committee of the IEEE Industry Applications Society.
Manuscript submitted for review November 15, 2008 and released for publication May 18, 2009. First published September 15, 2009; current version published November 18, 2009.
J. Lagorse and A. Miraoui are with the System and Transport Laboratory, University of Technology of Belfort-Montbeliard, 90000 Belfort, France
(e-mail: jeremy.lagorse@utbm.fr; abdellatif.miraoui@utbm.fr).
M. G. Simões is with the Power Electronics Laboratory, Engineering
Division, Colorado School of Mines, Golden, CO 80401 USA (e-mail: msimoes@mines.edu).
Color versions of one or more of the figures in this paper are available online at http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TIA.2009.2031786
increases with the level of hybridization of the HES (i.e., the number of elements present in the system). In addition, if the HES configuration changes, for instance when an element withdraws as a result of fault or maintenance, the centralized controller is unable to adapt its response. With a central controller, the EMS has also to be redesigned if a new element is added. Therefore, it is interesting to define a flexible, reliable, open, and scalable EMS.
This paper proposes a new approach to the HES based on the technology of the multiagent system (MAS). The adaptation of MAS to power engineering has been detailed in [1] and
[2]. The use in grid connected has also been detailed in [3].
With this approach, a HES is not seen as a global system to control but rather as a collection of independent entities that nevertheless collaborate. The control of the system is expected to emerge from the collaboration of the entities. In this way, a MAS naturally provides a flexible and reliable solution to control a HES with a changing configuration. First, the MAS approach applied to HES is introduced. Then, the agents and their behaviors are explained. Finally, a simulation model involving the use of agents to control the energy flow is presented, and the simulation results show that the proposed controller is able to adapt to a changing configuration.
II. MAS T HEORY
MAS theory is an emerging field that evolved from the distributed artificial intelligence (DAI) in the 1970s and 1980s.
Since MAS theory represents the major stream of research in DAI, the two fields are often confused. MAS technology has been successfully applied in many fields like telecommunication, manufacturing, transportation, etc. Although MAS research is widespread, there is no precise definition about what an agent is. Despite of the vague definition of agents, MAS theory generally specifies that they have the following main characteristics [4].
1) Agents have a certain level of autonomy, which means that they can make decisions without a central controller.
2) Agents are capable of acting in their environment, which means that they are able to perceive the changes in the environment in which they are immersed and then respond to those changes with their own actions whenever necessary.
3) Agents have proactive ability, which means that they have their own goals and do not just act in response to changes that have occurred in their environments.
0093-9994/$26.00 © 2009 IEEE
Authorized licensed use limited to: COLORADO SCHOOL OF MINES. Downloaded on April 08,2010 at 21:49:01 UTC from IEEE Xplore. Restrictions apply.
2124
TABLE I
P ARAMETERS OF THE E LEMENT
IEEE TRANSACTIONS ON INDUSTRY APPLICATIONS, VOL. 45, NO. 6, NOVEMBER/DECEMBER 2009
4) Agents have social ability, which means that agents can communicate with one another.
5) Agents have partial or no representation of the environment.
Based on these main features, the technology of intelligent agents and MASs is expected to alter radically the way in which complex, distributed, and open systems are conceptualized and implemented. Very intelligent agents are not necessarily needed; they can have a very simple individual behavior. The most known example based on this paradigm is a colony of ants. Each ant, taken as an agent, does not have a very complex behavior with an advanced reflection but the whole colony demonstrates an intelligent behavior through adaptation and flexibility. Therefore, the intelligent behavior can emerge from the cooperation of very simple agents. Due to the distributed, open, and complex nature of HES, the technology of MAS appears as a natural solution for the energy management purpose in HES. With an agent-based approach, a HES can be viewed as a collection of autonomous and “intelligent” agents that adapt to events occurring in their environment. The agents act both competitively and cooperatively for achieving a global performance of the system; such performance can be defined by the following goals:
1) to always supply the load;
2) to minimize the operational cost (limit the constraints on the devices);
3) to maximize the global efficiency.
In this paper, each device is assumed to be interfaced through an electrical converter. Thereby, the agents are the controllers that determine the amount of power and energy exchanged by the element with the rest of the system. The agents, their goals, and their behaviors are detailed in Section IV.
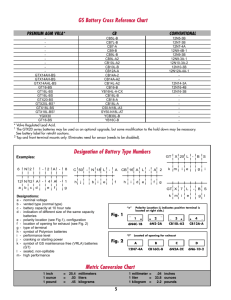
Fig. 1.
Hybrid system electrical layout.
efficiency is lower, its lifetime is less than SC, and it does not accept sharp load changes. For all these reasons, an SC has been preferred. Obviously, with an SC, the dc-bus voltage is not constant. That is why all the elements are connected to the dc bus through electrical converters. Those electrical converters, controlled by the MAS, allow managing the exchange of energy flow in the system.
A. Agents
IV. S YSTEM A GENTIFICATION
“Agentification” is the approach used to understand the system as a collection of different elements called the agents.
Agents are the controllers of the dc/dc converters. Unlike classical controllers, they have additional capabilities which make them “agents.” They decide on their own the power exchanged with the dc bus, which means that the information is not provided by a central controller. They can communicate, which means they know information coming from other agents and they also share information, for instance, about their capacity, their current state, and so on. It should be noticed that an agent is not obliged to share everything, and it does not have necessarily a complete representation of the other agents.
III. S YSTEM P RESENTATION
The studied hybrid system consists of the following items:
1) photovoltaic cells (PV);
2) two batteries (BAT1 and BAT2);
3) two FCs (FC1 and FC2);
4) dc bus;
5) supercapacitor (SC);
6) load.
The parameters of each storage element are summarized in
Table I; PV and load maximum power is 3 kW, FC1 supplies the maximum power of 2.5 kW, and FC2 supplies the maximum power of 0.5 kW (the hydrogen is considered to be always available).
The electrical layout of the system is shown on Fig. 1. The SC is directly connected to the dc bus. In HES, a battery is usually used to maintain a constant voltage on the dc bus. However, a battery has several drawbacks in comparison to an SC: its
B. Environment
An MAS is a set of agents which interact in a common environment. Consequently, the MAS approach implies to define an environment shared by the agents. For instance, in the application of lunar-explorer robots (where robots are agents), the environment is the moon [5]. In the studied HES shown in Fig. 1, all the elements are linked through the dc bus that consists of a large SC. Therefore, the dc bus appears as the common environment shared by all the elements constituting the MAS. For practical purpose, the environment is the state of charge (SOC) of the SC. This information is accessible by all the agents, and they can act in this environment. For example, a battery agent can change this environment (i.e., the SC SOC) by taking energy from the dc bus.
Authorized licensed use limited to: COLORADO SCHOOL OF MINES. Downloaded on April 08,2010 at 21:49:01 UTC from IEEE Xplore. Restrictions apply.
LAGORSE et al.
: MULTIAGENT FUZZY-LOGIC-BASED ENERGY MANAGEMENT OF HYBRID SYSTEMS 2125
C. “Blackboard” for Communications
Communication and sharing information is important to reach a global coordination. However, this communication is not necessarily direct between two agents. It can be performed using the principle of “blackboard.” Agents write their messages on a blackboard which can be read by all the agents as when someone leaves a message on the door of the fridge.
In a more abstract concept of communication, agents would only modify their environment to communicate like ants leave pheromones on the soil. The blackboard principle for communications was selected because it appeared to be promptly implemented and very efficient for this purpose.
The blackboard contains all the information required by the agents to take their decision. Information is written by agents themselves. It helps agents to rise the level of knowledge that they have of their own environment and of the other agents.
In this way, they pay attention to the other agents to reach the goal of the system and ensure a global coordination of their actions. This is the core of the MAS technology, since the goal is to control a very complicated system with minimum data exchange and minimum computational demands [6].
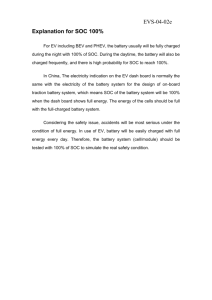
Fig. 2.
Membership functions.
D. Production Agent
The production agent has two goals: The first one is to deliver the maximum power from the source using a maximum power point tracking algorithm. The other goal of the production agent is to write on the blackboard information about the amount of energy produced. This second goal is the one which really makes it an agent. The communication can be regarded as part of their capability for acting in the environment [4].
TABLE II
F UZZY A LGORITHM FOR B ATTERY A GENT
E. Load Agent
As the production agent, the load agent has two goals. First is to keep a constant voltage to the load, which can be performed using classic controller. The other one is to inform on the current load power using the blackboard.
F. Battery “Fuzzy Agent”
The behavior of the battery agent can be summarized by several statements:
1) to charge the battery when its SOC is low and dc-bus SOC is high;
2) to discharge the battery when its SOC is high and dc-bus
SOC is low;
3) to protect the battery against deep discharge;
4) etc.
The imprecision of the first two rules, with terms like “low” and “high,” makes a priori difficult their interpretation to develop reliable agent behavior. In addition, the amount of power exchanged with the dc bus has also to be estimated and is not clearly defined in the rules. Fuzzy logic brings a useful solution when the reaction of a system only relies on semantic rules.
Furthermore, an EMS relying on fuzzy logic has been detailed in [7]. Thus, the battery agent is guided by fuzzy-logic rules and is called “fuzzy agent.”
The battery agent has two inputs: the dc-bus SOC (the environment) and the battery SOC. For both inputs, there are five fuzzy values defined: very low (VL), low (L), medium
(M), high (H), and very high (VH). For the output, the power, exchanged with the dc bus, seven fuzzy values are defined: negative high (NH), negative medium (NM), negative low
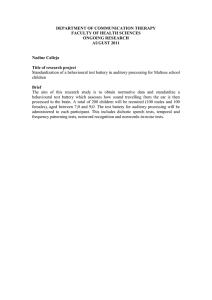
(NL), zero (Z), positive low (PL), positive medium (PM), and positive high (PH). A positive power flows when battery is discharging. The membership functions of output and input are shown on Fig. 2. The fuzzy algorithm consists of 25 fuzzylogic rules, giving the output power according to the two inputs as presented in Table II. It results in the fuzzy map shown on
Fig. 3.
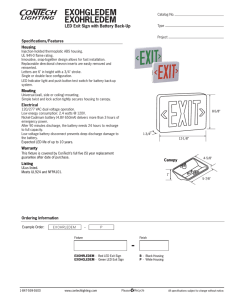
However, the battery agent does not entirely rely on fuzzy logic and is a combination of fuzzy and crisp logic. Indeed, in case of very high dc-bus SOC, it is interesting that battery agent catches the surplus of power to charge the battery. This behavior results from a selection between a “crisp” and the fuzzy decision, as shown in Fig. 4.
The behavior “Maximum charge” takes into account the state of the other batteries. Indeed, if another battery also catches the surplus of power at the same time, the whole power caught by the two batteries would be twice the initial surplus of power, and the dc-bus SOC would sharply decrease. The problem would be bigger and more complex, if more batteries are connected. That is why the surplus must be dispatched among the
Authorized licensed use limited to: COLORADO SCHOOL OF MINES. Downloaded on April 08,2010 at 21:49:01 UTC from IEEE Xplore. Restrictions apply.
2126 IEEE TRANSACTIONS ON INDUSTRY APPLICATIONS, VOL. 45, NO. 6, NOVEMBER/DECEMBER 2009
Fig. 3.
Three-dimensional fuzzy map of the battery agent.
Fig. 4.
Battery-agent behavior selection.
batteries. Thereby, a battery agent needs information from the other battery agents. The required information is written on the blackboard by the other battery agents.
1) The maximum power of the other batteries ( P max i
: maximum power of battery i ): this is to dispatch the surplus among the batteries according to their maximum power
(the battery with the greater power should be charged with a greater amount of power than one with a smaller maximum power).
2) The willingness to charge: if a battery is fully charged or is in fault, it cannot be charged ( W i
: willingness of battery i to be charged).
3) The current power production ( P prod
) and the current load consumption ( P cons
) : it allows the battery agent to deduce the surplus of power.
Based on this information, the agent can deduce the amount of power it is authorized to take ( M ax
Charge
) without disturbing the rest of the system as described in
M ax
Charge
=
−
P max n
I =1
P max i
×
W i
×
( P prod
−
P cons
) (1) where W i
∈ {
0 , 1
}
.
In order to avoid battery overcharging, the constraint described in the following expression has to be respected:
M ax
Charge
≤ −
P max
.
(2)
The battery agent in its environment is shown in Fig. 5.
Fig. 5.
Battery agent and its environment.
G. FC Agent
The FC is an additional source to compensate for the power that the PV system lacks to meet. This source has to be employed in a way to reduce the hydrogen consumption and to increase FC lifetime. This lifetime is constrained by both the operating time and the numbers of start/stop cycles. Thereby, in certain cases, as if the PV system meets the load power, it is interesting to keep on the FC to save a start/stop cycle.
For instance, if the PV production meets the load consumption but that for the next hour the load will be greater than the production, it is interesting to keep the FC working on its best efficiency point and to charge the batteries. Thus, the FC agent has to be able to forecast the production and the consumption.
This forecast is called energy needs (EN). EN gives the difference between the consumption and the production for the next ten hours and is assumed to be the same as 24 h previously. EN for the next h hour is expressed in h
−
14
EN
( h )
= h
−
24
P cons
−
P prod
.
(3)
The FC agent behavior is based on the operating mode that has been described. In addition, it has also to cooperate with other FC or, more generally, with other additional sources that compose the HES. For instance, if another FC already supplies the load in totality, it is not necessary to start the FC.
The FC agent’s behavior can be summarized with the algorithm shown Fig. 6. Three cases are considered.
1) First, if the FC is stopped, the SC SOC reaches a very low level and there is a lack of power, the FC is started and delivers the lack of power. Consequently, FC power can be expressed by
P
FC
= P load
− P prod
− P add
.
(4)
2) P add i is the power supplied by the additional sources
In a system with k additional sources, P add i is expressed
.
according to
P add
= k i =1
P add i
.
(5)
3) Second, if the FC is working and that there is still a lack of power, FC continues to delivers this lack of power as in (4).
Authorized licensed use limited to: COLORADO SCHOOL OF MINES. Downloaded on April 08,2010 at 21:49:01 UTC from IEEE Xplore. Restrictions apply.
LAGORSE et al.
: MULTIAGENT FUZZY-LOGIC-BASED ENERGY MANAGEMENT OF HYBRID SYSTEMS 2127
Fig. 7.
Simulation structure.
Fig. 6.
FC-agent behavior.
4) Finally, if the FC is working and the production meets the consumption, the agent decision relies on the ENs. If the
ENs are positive, the FC remains activated and delivers power with a maximum of efficiency ( P
Best Efficiency
) ; otherwise, the FC is shut down.
V. S IMULATION M ODEL
The proposed MAS has been implemented using MATLAB software. Usually, object-oriented languages, like C++ or Java, are used to develop MAS. An agent-oriented language does not exist, and object-oriented language is preferred because it has some similarities with the agent approach. However, MATLAB has been used because it is widely applied in electrical and power engineering to control applications, and it features a very convenient fuzzy-logic toolbox.
The simulation model consists of one main program describing the physical system, some functions describing the agents, and a global-structure-type data which represents the blackboard. The structure of the simulation model is shown in Fig. 7.
The functions’ parameters are the perceptions (i.e., the inputs) of the agents, and the returned values of the function represent the action of the agent in the environment. The functions are called from the main program. Furthermore, as the blackboard is a global variable, it can be accessed and modified by any function (i.e., agent). The function and the main program have been implemented using “m-script files.”
The model in the main program computes only power and energy on the physical point of view. That allows better un-
Fig. 8.
PV production and load profiles.
derstanding the response and the evolution of the HES under
MAS-based control.
VI. C ASE S TUDIES
In order to observe and to understand the adaptation of the system with a changing configuration, three cases are studied.
In the first case, all the elements work correctly. Then, the adaptation of the system when a battery is in fault is studied in the second case, and in the third case, an FC is in fault. The production and consumption profiles shown in Fig. 8 remain the same.
A. Case 1: Normal Operation
It is shown in Fig. 9 that FC is started when the dc-bus
SOC reaches a very low level. The power delivered by FC is equal to the lack of power (i.e., consumption minus production,
( P cons
−
P prod
) . Then, when dc-bus SOC overtakes a better level, 0.6 at the 15th hour, FC works on the best efficiency operating point (300 W). That is because, at the beginning of the simulation, the information on the ENs is not available yet, and its default original value is zero. Indeed, as the ENs are computed based on the 24 previous hours, they are available after the 24th hour. However, at the 45th hour, ENs are negative, and the dc-bus SOC goes over the level of 0.6 so the FC is stopped.
Fig. 10 shows the evolution of batteries power and SOC. In the beginning, the batteries are discharged and cannot supply
Authorized licensed use limited to: COLORADO SCHOOL OF MINES. Downloaded on April 08,2010 at 21:49:01 UTC from IEEE Xplore. Restrictions apply.
2128 IEEE TRANSACTIONS ON INDUSTRY APPLICATIONS, VOL. 45, NO. 6, NOVEMBER/DECEMBER 2009
Fig. 9.
DC-bus SOC, ENs, and FC power evolutions for case 1.
Fig. 11.
System reaction for case 2 (battery fault).
Fig. 10.
Batteries power and SOC evolutions for case 1.
the load. The amount of power increases while the difference between the SC SOC and the batteries SOC also increases.
Furthermore, as the battery 2 has a larger power than battery 1, battery 2 is discharged faster. At the 15th hour, FC1 is started and supplies the load. Due to the behavior of the battery agent, battery 1 charged the SC until the battery and SC SOC become equal. Consequently, battery 2 SOC also increases and batteries SOC naturally tend to be balanced. When SC is full, for instance, at the 25th hour where the excess of production is
3 W, the produced power is shared among the batteries. Once a battery is full, charging is stopped.
Fig. 12.
System reaction for case 3 (FC default).
C. Case 3: Adaptation Following an FC Fault
For this third case, a second FC is added; its power is smaller than the first one, and it is rated at 500 W. The other parameters of the systems are unchanged, and only FC 1 is in fault at the
36th hour. Before this fault, the power delivered by FC1 is the same as in the previous case (see Fig. 12). Furthermore, it should be noticed that FC2 remains inactivated. However, once FC1 is in fault, the power supplied to the dc bus is insufficient. Consequently, the dc-bus SOC drops and when it reaches 0.3, FC2 is activated. Then, FC2 is stopped because the
EN’s forecast is negative for the next ten hours.
B. Case 2: Adaptation Following a Battery Fault
In this case, battery 2 is assumed to be in fault from the
25th hour until the 56th hour. The system reaction is shown in
Fig. 11. In the beginning, the system is obviously unchanged.
However, when battery 2 is in fault, battery 1 delivers more power as during the 31st hour or after the 50th hour. Furthermore, when SC is full, battery 1 is charged with the maximum power available. However, once battery 2 is no longer at fault, the power available is shared to charge both batteries. This sharing of resource is obtained due to the cooperation of battery agents through the blackboard.
VII. C ONCLUSION
The MAS technology applied to the energy management in a stand-alone system has been presented in this paper. The MAS approach and the agents’ behaviors have been detailed. The system reaction has been observed through a simulation model, and it has been demonstrated that the proposed EMS is able
Authorized licensed use limited to: COLORADO SCHOOL OF MINES. Downloaded on April 08,2010 at 21:49:01 UTC from IEEE Xplore. Restrictions apply.
LAGORSE et al.
: MULTIAGENT FUZZY-LOGIC-BASED ENERGY MANAGEMENT OF HYBRID SYSTEMS 2129 to adapt its response even for changing configurations. When the system is changed, each agent adapts its behavior, and the system continues to work without perturbation, i.e., the load is always supplied with high efficiency.
R EFERENCES
[1] S. D. J. McArthur, E. M. Davidson, V. M. Catterson, A. L. Dimeas,
N. D. Hatziargyriou, and F. Ponci, “Multi-agent systems for power engineering applications—Part I: Concepts, approaches, and technical challenges,” IEEE Trans. Power Syst.
, vol. 22, no. 4, pp. 1743–1752, Nov. 2007.
[2] S. D. J. McArthur, E. M. Davidson, V. M. Catterson, A. L. Dimeas,
N. D. Hatziargyriou, and F. Ponci, “Multi-agent systems for power engineering applications—Part II: Technologies, standards, and tools for building multi-agent systems,” IEEE Trans. Power Syst.
, vol. 22, no. 4, pp. 1753–1759, Nov. 2007.
[3] A. L. Dimeas and N. D. Hatziargyriou, “Operation of a multiagent system for microgrid control,” IEEE Trans. Power Syst.
, vol. 20, no. 3, pp. 1447–
1455, Aug. 2005.
[4] Z. Jiang, “Agent-based control framework for distributed energy resources microgrids,” in Proc. IEEE Int. Conf. Intell. Agent Technol.
,
2006, pp. 646–652.
[5] J. Ferber, Multi-Agent Systems: An Introduction to Distributed Artificial
Intelligence . Reading, MA: Addison-Wesley, 1999.
[6] M. Wooldridge, “Agent-based software engineering,” Proc. Inst. Elect.
Eng.—Softw. Eng.
, vol. 144, no. 1, pp. 26–37, Jan. 1997.
[7] C. Abbey and G. Joos, “Energy management strategies for optimization of energy storage in wind power hybrid system,” in Proc. 36th IEEE Power
Electron. Spec. Conf.
, 2005, pp. 2066–2072.
Abdellatif Miraoui was born in Morocco in 1962.
He received the M.Sc. degree from Haute Alsace
University, Colmar, France, in 1988, and the Ph.D.
degree and the Habilitation to Supervise Research from Franche Comté University, Besançon, France, in 1992 and 1999, respectively.
He was an Associate Professor of electrical machines at Franche Comté University. He was also distinguished as an Honorary Professor by the University of Brasov, Brasov, Romania. He is a Doctor
Honoris Causa of Cluj-Napoca Technical University,
Cluj-Napoca, Romania. Since 2000, he has been a Full Professor of electrical engineering (electrical machines and energy) at the University of Technology of
Belfort-Montbeliard (UTBM), Belfort, France, where since 2001, he has been the Director of the Electrical Engineering Department, was the Head of the
“Energy Conversion and Command” Research Team (38 researchers in 2007), and since June 2008, has been the Vice President of Research Affairs. He is the author of over 60 journal and 80 international conference papers. He is the author of the first textbook in French about fuel cells: Pile à Combustible:
Principes, Technologies Modélisation et Applications (Fuel Cells: Basic Principles, Technologies, Modeling and Applications) (Ellipses-Technosup, February
2007). He is the Editor of the International Journal of Electrical Engineering
Transportation . He is also a Scientific Responsible for the column “ Electrical
Machines ” of the important French industrial review Techniques de l’Ingénieur .
His special interests include fuel-cell energy, integration of ultracapacitor in transportation, design and optimization of permanent-magnet machines, and electrical propulsion/traction.
Prof. Miraoui is a member of several international journals and conference committees. He is a member of the IEEE Power Electronics Society, IEEE
Industrial Electronics Society, and the IEEE Vehicular Technology Society.
In 2007, he was the recipient of a high distinction from the French Higher
Education Ministry, “Chevalier dans l’Ordre des Palmes Académiques.”
Jérémy Lagorse was born in Dole, France, in 1983.
He received the M.S. degree in electrical and control system engineering from the University of Technology of Belfort-Montbeliard, Belfort, France, in
2006, where he is currently working toward the Ph.D.
degree in electrical engineering.
His research interests include renewable energy, optimal sizing, and energy management.
Marcelo G. Simões (S’89–M’95–SM’98) received the B.S. and M.Sc. degrees in electrical engineering from the University of São Paulo, São Paulo,
Brazil, in 1985 and 1990, respectively, the Ph.D. degree in electrical engineering from the University of
Tennessee, Knoxville, in 1995, and the Livre-
Docencia (D.Sc.) degree in mechanical engineering from the University of São Paulo in 1998.
He is currently with the Power Electronics Laboratory, Engineering Division, Colorado School of
Mines, Golden, where he has been engaged in establishing research and education activities in the development of intelligent control for high-power-electronics applications in renewable- and distributedenergy systems. He has authored the books Alternative Energy Systems: Design and Analysis With Induction Generators (CRC Press, 2005) and Integration of
Alternative Sources of Energy (Wiley/IEEE Press, 2007).
Dr. Simões was the recipient of a National Science Foundation (NSF) Faculty
Early Career Development (CAREER) in 2002, the NSF’s most prestigious award for new faculty members. He is serving IEEE in several capacities and is currently an Associate Editor of the IEEE T RANSACTIONS ON P OWER E LEC -
TRONICS , Chair for the IEEE Industry Applications Society (IAS) Industrial
Automation and Control Committee, and Vice Chair for the IAS Manufacturing
Systems Development and Applications Department.
Authorized licensed use limited to: COLORADO SCHOOL OF MINES. Downloaded on April 08,2010 at 21:49:01 UTC from IEEE Xplore. Restrictions apply.