OCEANOGRAPHY DEPARTMENT OREGON STATE UNIVERSITY of
advertisement

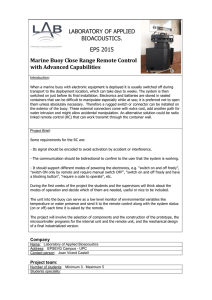
... 5 0 1 COLUMBIAR. R. LIBRARY Marine Science Laboratory Oregon State University DEPARTMENT of OCEANOGRAPHY rILLAhvoot 11.4Y SCHOOL of SCIENCE OREGON STATE UNIVERSITY ANALYSIS OF A TWO-POINT MOORING FOR A SPAR BUOY Richard F. Dominguez, John H. Nath, Steve Neshyba and David A. Young Sponsor Standard Oil of California Reference 69-34 Data Report No. 38 December 1969 Analysis of a Two-Point Mooring for a Spar Buoy By Richard F. Dominguez, John H. Nath, Steve Neshyba and David A. Young Data Report No. 38 December 1969 Reference 69-34 Sponsor : Standard Oil of California TABLE OF CONTENTS Acknowledgements List of Symbols List of Tables List of Figures ii iv Introduction Theoretical Considerations 7 Design Criteria Motion of the Buoy . ....... . A Numerical Model An Analogue for Mooring Statics Design and Operation Curves 7 10 21 23 26 Experimental Considerations Froude Modeling Law Couchy Modeling Law Testing Facilities Testing Procedure Buoy Models Frequency Response in Heave and Pitch. 39 . 39 40 41 42 42 46 Summary 51 Recommendations 53 References 82 Appendix 83 Hydraulic Model Data 84 A CKNOWLEDGEMENTS We express appreciation to Standard Oil of California for supporting this study on the two-point mooring of a spar buoy. We express appreciation to the Office of Naval Research for their general support of research in which the spar buoy plays an important role. We thank the National Science Foundation, Atmospheric Science Branch, for their support of the construction of a Marine Atmospheric Research Facility based on the TOTEM buoy. Bill Fischer of Standard Oil has given valuable suggestions on engineering techniques. G. B. Burdwell of ESSA has provided information leading to a design wave spectrum for the Oregon Coastal waters. Ray Fajardo has contributed to the numerical model of the two point mooring. Charles Nath, Linda and Cathy Neshyba assisted in reduction of hydraulic model data. We appreciate the cooperation of General Dynamics, Convair San Diego Division, in the lease of their wave basin for testing of the model buoy and mooring. LIST OF SYMBOLS Definition Symbol Acceleration a Area Damping coefficient Drag coefficient d d Diameter s Depth from the surface to the spring buoy line and chain junction Wave frequency Froude number Buoyant force F F F F F F d np nh rh rp Drag force Natural frequency of spar buoy in pitch Natural frequency of spar buoy in heave Resonant frequency of spar buoy in heave Resonant frequency of spar buoy in pitch g Gravitational constant H Wave height Spar buoy heave Moment of inertia k Spring constant Horizontal distance from the center line of spring buoy to the lowest point on the anchor chain L Characteristic length Wave length Mass Kinematic viscosity Pitch N Reynolds number R Mass density Wave slope H/X t Time Wave period Unit weight of sea water The angle the anchor line forms with the horizontal Velocity W Weight wn Natural radian frequency x Cartesian coordinate y Cartesian coordinate Cartesian coordinate Damping ratio Line mass density per foot of length LIST OF TABLES Table 1. Physical Properties of Prototype TOTEM Buoy Table 2. Static Mooring Line Analogue Model Results Table 3. Summary of Determinations of Natural Period in Seconds Table 4. Natural and Resonant Frequency Response of Spar Buoy Models Table 5. Hydraulic Model Data - Frequency Response of Buoy 1, 3 and S Table 6. Hydraulic Model Data - Two-Point Mooring with Straight Buoy Connecting Chain Table 7. Hydraulic Model Data - Two-Point Mooring with Weighted Lines Connecting Spring Buoys to TOTEM Table 8. Frequency Response of Buoy S' iv LIST OF FIGURES Fig. 1. Prototype Spar Buoy, TOTEM Fig. 2. TOTEM I under construction at the Marine Science Center, Newport, Oregon Fig. 3. Two-Point Mooring Fig. 4. Two-Point Mooring System and Nomenclature Fig. 5. Design Wave Spectrum Fig. 6. Forces Acting on Spar Buoy - Case I Fig. 7. Forces Acting on Spar Buoy - Case II Fig. 8. Mass-Spring-Damper System Fig. 9. Forces Acting on Spar Buoy during Pitch Fig. 10. Flow Chart of the Numerical Model Fig. 11. Static Mooring Line Model Fig. 12. Wind Velocity vs. Drag Force on Spar Buoy Fig. 13. Horizontal Displacement in X Direction Fig. 14. Vertical Displacement of Spar Buoy vs X Fig. 15. Connecting Chain Span and Spring Buoy Depth vs. Horizontal (X) Displacement of TOTEM Fig. 16. Line and Chain Tension vs. Displacement Fig. 17. Line Tension vs. Anchor Line Bottom Angle. Fig. 18. Displacement vs. Horizontal and Vertical Force Acting on Spar Buoy Fig. 19. Y vs. X' Displacement Fig. 20. Vertical Displacement of Spar Buoy vs. X' Fig. 21. Model Tests of TOTEM buoy and its two-point mooring Fig. 22. TOTEM buoy models, scale 1:100 Fig. 23. General Dynamics Model towing basin with TOTEM model and two-point mooring subjected to wind drag Fig. 24. Underwater photo of 2-point moor model in General Dynamics wave basin under 100 kt wind force. Fig. 25. Frequency Response of Buoy 1 Fig. 26. Frequency Response of Buoy 1 Fig. 27. Frequency Response of Buoy 3 Fig. 27a. Frequency Response of Buoy 3 (in pitch) Fig. 28. Frequency Response of Buoy S Fig. 29. Frequency Response of Buoy S Fig. 30. Frequency Response of Buoy 3 Fig. 31. Frequency Response of Buoy 3 Fig. 32. Frequency Response of Buoy 3 Fig. 33. Frequency Response of Buoy 3 Fig. 34. Frequency Response of Buoy S' Fig. 35. Frequency Response of Buoy S' Fig. 36. Frequency Response of Buoy 3 Fig. 37. Frequency Response of Buoy 3 Fig. 38. Frequency Response of Buoy 3 Fig. 39. Frequency Response of Buoy 3 Fig. 40. Frequency Response of Buoy 3 Fig. 41. Frequency Response of Buoy 3 vi Fig. 42. Frequency Response of Buoy 3 Fig. 43. Frequency Response of Buoy 3 Fig. 44. Normalized Frequency Response - Buoy 1 Fig. 45. Normalized Frequency Response - Buoy 3 Fig. 46. Normalized Frequency Response - Buoy S Fig. 47. Pitch and Heave vs. Wave Height of Buoy 1 Fig. 48. Pitch and Heave vs. Wave Height of Buoy 3 Fig. 49. Pitch and Heave vs. Wave Height of Buoy S Fig. 50. Normalized Frequency vs. Pitch and Heave for Various Chain Collar Positions Fig. 51. Normalized Frequency vs. Pitch and Heave for Various wind Directions vii INTRODUCTION Recent activity in the exploration and development of the ocean's resources has created a need for scientific and technical knowledge in many areas. One example is the need for rapid and reliable techniques for ascertaining and for the predictions of sea state and the atmospheric conditions at particular ocean locations. The Department of Oceanography at Oregon State University will attempt to make such atmospheric and oceanographic measurements from a Spar buoy in the near future. In September 1969, the buoy was moored on a two-point mooring some 30 miles off the Oregon coast, in 1800 ft of water. This is a report on the engineering analysis of the mooring structure for the buoy. The continued development of ocean resources will depend heavily on the installation of moored structures and it is hoped that this report will contribute to the engineering knowledge of such structures and moorings. The TOTEM spar buoy was built by the Department of Oceanography, Oregon State University. Figure 1 shows the shape and dimensions of the buoy. Figure 2 is a photograph of the prototype under construction. Listed in Table 1 are the physical properties of the buoy. It will be used to monitor atmospheric and ocean conditions by means of unmanned data collecting devices. Data 'will be telemetered directly to the central digital computer at Oregon State University. The advantage of such a system is that it can obtain measurements continuously at a fixed location over extended periods of time and transmit this information HO/ST INSTRUMENT HOUSE - RATED FOR NOMINAL 5000 LB. PAYLOAD SPAR d„..--ST/LL WATER LEVEL TANK NO. / - FLOTATION TANK NO. 2 - RESERVE TRIM / FLOTATION TANK NO. 3 - TRIM 181' 73' STEM BALLAST A - --- TANK NO. 4 - BALLAST FLOTATION 12' BALLAST Fig. 1 Prototype Spar Buoy, TOTEM. • ---:011)=.11111101:1111#11111WRSINIMM--,,-;ffivt. 1PLAWSWS FrYir!"! Imminammuld. - mixtuir ",1=1 ' Fig. 2. TOTEM I under construction at the Marine Science Center, Newport, Oregon . (-4 4 TABLE 1 Physical Properties of Prototype Totem Buoy Item 1. Weight 2. Center of gravity from bottom of buoy Flotation and ballast tanks empty Flotation and ballast tanks flooded to normal design elevation 55, 460 lbs 141, 820 lbs 81. 0 ft 62. 7 ft 74.5 ft 3. Center of buoyancy from bottom to buoy 4. Centroidal moment of inertia 5, 329, 000 lbssec2-ft 8, 796, 000 lbs- sec2 ft ocean would allow for continuous measurement of physical oceanographic and meteorological data simultaneously from widely separated locations. This report covers the investigation of the static and dynamic behavior of the particular two-point mooring shown in Figure 3. Shown in Figure 4 is the nomenclature and coordinate system adopted in this report. The primary objective of this study was to develop a reliable and economical mooring. The influence of wind, current and surface waves upon the motion and the internal forces within the system's components was considered. It was intended initially to completely analyze the problem from three viewpoints -- (1) an analytical approach where the equations of motion were linearized in order to obtain a closed solution for the buoy motion, (2) a numerical analysis which included all non-linearities and, (3) a hydraulic model study where the motions and forces were modeled in accordance with Froude law of similitude. However, due to a shortage of both time and available personnel the total analysis included the following: (1) an analysis of the natural frequencies of the buoy in heave and pitch; (2) an analysis, with the aid of a structural analogue, of the static forces and displacements due to steady state wind and current; (3) a nearly completed numerical model of the motion of the unmoored buoy; and (4) a hydraulic model study which established the sufficiency of the mooring for sinusoidal waves of frequencies that Fig. Two-Point Mooring 6 Spring buoy PL AN ds ° -i- 1 I Spring buoy epth q Chain sag 0.,,,--Totem buoy I ELEV. O Fig. 4. Two-Point Mooring System and Nomenclature. covered completely the design wave spectrum shown in Figure 5. THEORETICAL CONSIDERATIONS First established were the design criteria, or probable environmental conditions which the mooring would be required to resist. Following this, internal forces and motion of the system components were determined for given loading conditions. Design Criteria Two sets of design criteria were developed. A 100 knot wind with a 2 knot surface current was used to establish the response of the system to static loads. In addition, a 10-year storm was assumed in order to develop a wave spectrum to design for dynamic action of the buoy and its mooring. The first criterion is self-explanatory. The second will be discussed briefly. Watts and Faulkner (5) have described a set of recorded storms off Vancouver Island which they used to develop curves for wind speed vs average interval between storm occurrences in years. They did not state what statistical techniques were used as a basis for the curves. However, the curves appear to be reasonable. It was decided to use these curves as it was felt that the information would be conservative since the storms off Vancouver are notoriously worse than off the coast of Oregon 240 miles south. The curves show that a 10-year wind can be defined as: 8 (f) .404 0 .05 .32 .35 .123 Frequency in cps' Fig. 5. Design Wave Spectrum 38' .*N 143' w w= Fb Fig. 6. Forces Acting on Spar Buoy - Case I w Fb > w zo at t=0 I Fb Fig.7. Forces Acting on Spar Buoy - Case II. Fig. 8. Mass-Spring-Damper System 10 Magnitude of Wind (Knots) (MPH) 45 65 85 105 39.1 56.5 74.0 91.2 Duration (Hours) 24 2 1 Gust It was then necessary to establish a significant wave height to be used. Both the S-M-B method for an 80% fully-developed sea and the P-N-J method for a fully-developed sea were utilized as explained in Ippen (1). It was also decided to assume that the durations were somewhat longer, and the most severe condition was determined to be that where the wind duration is 44 hours. The resulting significant period is 14 seconds. A Gaussian sea surface was then assumed and an equilibrium spectrum where the high frequency spectral density values vary with the frequency to the negative fifth power, as explained in Plate and Nath (3), was then obtained. The resulting design spectrum is shown in Figure 5. Motion of the Buoy Since the primary mission of the spar buoy is to serve as an instrumented floating platform from which oceanographic and atmospheric measurements can be made, it is extremely important that the buoy be sufficiently stable under most sea conditions. The important forces which the buoy must withstand are those due to wind and current drag, and to wave interaction with the buoy. 11 Structures which are subject to constraint, which provides a restoration force when displaced, will exhibit oscillations that will occur at the natural frequency of the structure. Should the structure be subjected to disturbing forces composed of many frequency components such as that produced by waves, the possibility of resonance must be considered. Resonance between a structure and the disturbing force can occur when the frequency of the applied force matches the natural frequency of the structure. This results in a condition where the displacement amplitude of the structure may be large, depending on the amount of damping present. The occurrence of excessive displacements can be both destructive to the system and detrimental to its intended use. Consideration of the spar buoy's restraints show it to possess six degrees of freedom of motion. Therefore analyses of its motion must consider the possibility of both translation and rotation with respect to all three coordinate axes. The important forms of oscillatory motion, in terms of buoy stability, that can be expected to take place, are vertical motion in the z direction (a condition known as heave) and rotation about the horizontal x and y axes, termed pitch. Since the buoy is symmetrical about the z axis it is necessary to investigate pitch for one direction only. To obtain analytical solutions for the motion of the spar buoy with respect to heave, two cases of motion were considered. The first case neglected the effects of form drag on the buoy to obtain a first approximation of the natural period of the buoy. The second case made use of this 12 result to obtain an improved solution by including form drag effects due to fluid viscosity in order to get a first approximation of the equivalent linear relative damping coefficient. Case I - Viscous Effects Neglected If the buoy shown in Figure 6 is given a small initial vertical dis- placement z from its static equilibrium position, the effect is to change o the buoyant force acting on the buoy by an amount equal to the additional positive or negative displacement weight of the sea water displaced by the buoy. The only two forces acting on the buoy are thus the weight of the buoy which is constant, and the buoyant force which is dependent on the vertical position of the buoy. Upon release from the initial displacement position, without the effects of viscosity, the buoy will oscillate about its equilibrium position indefinitely. The equation of motion for the buoy is arrived at by the application of Newton's second law. E F = ma w-F b = m 2 2 z/dt . . (1) where m = mass of the buoy a = vertical acceleration of the buoy F = buoyant force b t = time w = weight of the buoy. The left-hand portion of this equation can be expressed in terms of the displacement z and the diameter d of the buoy. 13 - Tr 2 md2z ydz2 4 dt . . . (2) where 'y= unit weight of seawater. 3 Substitution of the following values, d = 3. 5 ft, y= 64 lbs/ft , and m = 4, 400 slugs, reduces the above equation to the following form: 2 d z 2 dt 1 7. 15 z = 0 . . . (3) This differential equation has the following solution: z = A sin t 1/7. 15 + B cost t V 1/7. 15 . (4) where V1/7. 15 is the radian frequency. Evaluation of the constants A and B is obtained by applying the boundary conditions: 51) t = 0, (d)t = 0, Z=Z dz dt 0 n thus =0 and B = z o and the solution therefore becomes z = z cos 0/1/7.15 . . o .". T = 16.8 sec or f = 1/T = 0.059 cycles/sec. (5) 14 Case II - Viscous Effects Included Formulation of the equation of motion in this case is identical to that of Case I except for the inclusion of the drag force on the buoy which can be expressed in terms of the following equation: = 1/2pAC d 1 V IV .. (6) where: F = drag force D p = specific density of the fluid A = projected area or surface area in contact with fluid for the case of pure shear drag C d = drag coefficient V = velocity The above form of the equation is used to maintain the directional sense of the drag force, which is always opposite to the direction of motion of the buoy. The drag coefficient C d in this equation is dependent upon the ratio of viscous forces to inertial forces. This can be expressed VL in terms of a Reynolds number NR = v where V = velocity, L = characteristic length, and v= kinematic viscosity of the fluid. Drag is also dependent upon the relative roughness of the surface and the shape of the object. Values of experimentally determined drag coefficients are presented in any number of standard fluid mechanics references and are normally expressed in terms of the Reynolds number, determined from a steady-state velocity condition. Since oscillatory flow is not steady, a 15 single representative drag coefficient, and hence solution based upon this concept, can only be an approximate one. An additional added complication is the fact that what is the leading edge of the flow during half the cycle becomes the trailing edge during the next half cycle. The degree of influence this has upon the drag is not precisely known. From Eq. 6 it can be seen that the drag force is dependent upon the square of the velocity. When the drag term is incorporated in the equation of motion the resulting differential equation becomes non-linear. An approximate solution to the equation can however be obtained by linearization of the equation. By application of Newton's second law, the equation of motion now becomes, + = ma 2 d z w - F - F =m b D 2 dt (7) The drag experienced by the buoy can be considered to be made up of two parts - that produced by the lower end which is comparable to a circular disc oriented perpendicular to the flow; and that part due to the shear drag developed by the cylinder sides equivalent to that produced by a flat plate of equal area (see Fig. 7). If a total vertical displacement of 10 ft is assumed, and the period obtained in Case I is used, a representative average velocity, over a full cycle, can be obtained for the buoy. 2 x 10 V = avg. cyclic velocity - 16. 8 1.2 ft/sec. 16 Assuming a kinematic viscosity we can now obtain drag force terms as a linear function of the velocity as shown below. Disk: NR Vd Disk .. C D 1. 2 x 4. 5 -5 1. 5 x 10 - 3.6 x 10 5 = 1.2 F D= 1/2 pAC D VIVI= 22.9 V Disk Plate: 1 x 143 VL x 10 7 N R- 1. 05 -5 Plate 1.5 x 10 C D= O. 035 F FD = 80. 5 v Substitution for all terms in Eq. 7 yields: 2 d -615 z - (22. 9 V + 80.5 V) = 4400 z 2 dt dz V dt 2 . d z 2 dt + 0.0236 dz + 0. 104z dt =0 • • (8) Examination of Eq. 8 will show that it is equivalent in form to that of the equation for a mass-spring-damper system such as shown in Fig. 8. The equation for this system can be written as 17 m2 + cz + kz = F(t) . \X inertia damping restoration term term term (9) In this equation c is the damping coefficient, k is the linear spring coefficient, and F(t) is the forcing function. The solution to this important second-order linear differential equation is well known and will be used to obtain a solution to Eq. 8. The equivalent linear relative damping coefficient is therefore obtained directly from the first form of Eq. 8. c = 22. 9 + 80. 5 = 103. 4 The damping ratio is thereby found to be - 103.44 c 2I rciT 21/615x4400 - O. 0315 This now allows for calculation of the natural frequency and period fh - w -12 2 Tr - 0.0594 cycles/sec and T 1/f h = 16. 8 sec. The linearization procedure used to obtain the natural frequency of oscillation in heave will again be used to obtain the natural frequency in pitch. Summing moments about the center of gravity of the buoy shown 18 in Fig. 9 will obtain the following form of Newtons' second law. =i cg cg (10) . Here e = the angular displacement, e = the angular velocity, and & = angular acceleration. We now seek to write Eq. 10 in the following form which is equivalent to Eq. 9 Ie .,._. Inertia term ke = \--,.--/ Restoration term cê ...y___, Damping term M(t) . ■-„-Forcing moment The damping term is obtained by integrating the drag force over the length L of the buoy. Moment of drag = 5 1/2 C D e V 2 z dA (12) L Now V = ze dA = D dz where D = ave buoy diameter = 4. 0 ft P = 2. 0 slugs/ft3 Since the drag coefficient is dependent on the Reynolds number, hence the velocity which will vary from zero at the center of rotation, to a maximum near the free surface, an average weighted drag coefficient of 0. 5 is found and will be used. This was arrived at in a similar manner as that used in the heave solution. The natural period in pitch was calculated without consideration of viscous damping, then an initial displacement of 10 degrees from the vertical was assumed which enabled the calculation of an average angular cyclic velocity CZ.) = 0. 04 rad/sec. Substitution of the appropriate values into Eq. 12 and integration from r l to r 2 yields the following: 19 Fig.9 Forces Acting on Spar Buoy During Pitch. 20 4 4• Moment of drag = Caw (rz + r = 0. 5 (0. 04)(80 4 = 62. 74) 6 6 = 1. 15 x 10 8. (13) The restoration force is provided by the weight w acting through the center of gravity and the buoyant force acting vertically through the center of buoyancy. By summing moments about the center of gravity the following relation is obtained (14) 8 F sins . E M cg = 11 b • If we assume small angular displacement, Sin 8 C. We further assume that any accompanying heave is small therefore ZF z = ma 0 and F b = w = 141, 820 lbs Hence Eq. 14 becomes = 1. 67 x 10 6 F Mcg (15) e . Now by substitution of Eq. 13 and 15 into Eq. 10 we obtain Ie+ 1. 15 x 10 6 6 + 1. 67 x 10 6 e = 0 . (16) which is the exact form of Eq. 11 which we seek. Substitution of a value of I = 8. 79 x 10 6 gives Damping ratio S = c- 0. 152 2JkI 21 Natural undamped radian frequency in pitch L') np = — k = 0. 435 radians /sec I Natural frequency in pitch _2 F =co np np = 0. 070 cycles sec 21r and T = 14.3 sec A Numerical Model Our original intention was to develop a numerical model that would predict the response of the system to sinusoidal waves, wind and surface current. Drag and added mass coefficients were to be determined from hydraulic model studies. It was hoped that the model could be used to determine the optimum amount of chain for use in the buoy connecting catenaries and to investigate other design factors such as the best attachment point for the chain on the Totem buoy. The model was based on Newton's second law of motion. However, this portion of the study was drastically limited because of time; and we, therefore, attempted to model just the motion of the Totem, untethered. This numerical model is about 90% completed. The program is running but obviously contains an error. A flow chart of the program is given in Figure 10. 22 PROGRAM SPAR BUOY (Program to Determine Motion of TOTEM Buoy) STOP START DA TA Input buoy dimensions and other parameters. Input environmental data such as wave height and length, wind, etc. Print out all input. t=t+At No PRINT 2 V DEFINE Print all accelerations Define wave constants and other constants. Set all velocities = 0 Establish At Set t = 0 I Subroutine FRCA NOIVI Establish various functions such as water particle velocity, etc. I J - - Calculate moments about center of gravity of buoy. Calculate forces in longitudinal direction. Solve for all accelerations with simultaneous equations. Convert to primary coordinate system. Find displacements and velocities for next At with recurrence formulae Subroutine STRIPFC PRINT 1 Print time, buoy coordinates and velocities Calculate forces acting on cylindrical strips of the buoy in the secondary coordinate system. Fig. 10. Flow Chart of the Numerical Model 23 An Analogue for Mooring Statics It was originally intended that tension forces in the anchor line and chain would be measured dynamically in the hydraulic model under representative wind, wave and current conditions. However, the experimental difficulties to be discussed prohibited this. The two-point mooring configuration can be considered to be a cable system whose supports are free to move, except at the anchor position. Therefore, any change in the external forces acting on the system, such as a change in wind drag or surface current on the spar buoy must result in movement of the mooring system components to new equilibrium positions and cable configurations. Consideration of the chain alone indicates a number of geometric possibilities depending on relative position of each of the supporting buoys. For a cable supporting its own weight, uniformly distributed along its length, the resulting shape of the cable is that of a catenary. Unlike most other structural members, a cable cannot develop resistance to bending and compression forces but acts as a tension member only. Determination of internal tension forces in the cable can be evaluated provided the locations of the supports are known, which for a generalized loading of the mooring system is not the case. The result is a force system which is not amenable to direct solution. Two alternative ways of obtaining anchor line and chain tensions for design purposes were considered. 1. Solution of the resulting set of equilibrium and displacement equations for each of the component cables, buoy and the mooring system as a whole by a reiteration scheme using a digital computer. 24 2. Solution by means of a static-mooring line analogue model. Due to a limitation on time, the second method of solution was adopted. Since the two-point mooring is symmetrical, it was only necessary to construct an analogue model of one-half of the mooring system. The external forces considered to be acting on the system were 1) the submerged weight of the anchor line, and the connecting chain, 2) the net buoyant force produced by the spring buoy, and 3) the reactions at the anchor and spar buoy end of the chain. Since the cable geometry is d e pendent only on the external loads applied to the system at the spar buoy, it was possible to displace the spar buoy end of the chain as shown in Figure 11 to various selected positions and then measure the resulting cable configuration. The model was constructed to two scale ratios: Length ratio: 1 inch = 19. 7 feet Weight ratio: 1 gm 56.0 lbs. The spar buoy end was displaced in either the positive or negative x direction (see Figure 11). Vertical displacement of the spar buoy in the z direction was disregarded as this would be small and would not significantly affect the cable configurations or tensions, even for extreme conditions. Since the spring buoy exerts a constant vertical force owing to its net buoyancy, a spring buoy location corresponding to this condition was then obtained by moving the spring buoy end (mechanical spring) to a position, by trial and error, which corresponded to the required vertical force. Once this position was obtained, the resultant cable geometry. 25 EQUILIBRIUM POSITION FOR ZERO DISPLACEMENT OF SPAR BUOY 80' d SPAR BUOY END OF CHAIN CALIBRATED SPRING AT SPRING BUOY POSITION SPAN 'Ng Physical Description Chain Length = in Equilibrium position 600 ft. 9,300 es Span = 465 ft. Sag = 168 ft. Chain Weight = in air Spring Buoy ÷ net Buoyancy = 13,400 #'s 1800 d = bot = 75° ft. degrees Fig. 11 Static Mooring Line Model. 26 was measured. We then calculated the external force at the spar buoy required to displace it, the line and chain tensions, and the reactions at the anchorage and at the spring buoys. Cable reactions and tensions were calculated using the equations for a catenary to locate the center of gravity of the cable and its segments. Table 2 contains a summary of the results obtained for this part of the model investigation. All dimensions and forces have been converted and are presented in terms of the prototype. Design and Operation Curves In order to summarize and present the results of this study in a convenient and readily usable manner, a series of curves were developed, as given in Figures 12 through 20. It should be noted that these curves were developed for the mooring configuration, including chain weights, buoy size, etc. , shown in Figure 11 and, therefore, apply to these conditions only. The use of these curves is illustrated by means of an example. Example 1. A 60 knot wind accompanied by a 2 knot surface current from the direction, act on the buoy and mooring system in the positive x direction, parallel to the anchorage points. To determine the geometric response of the mooring system and the forces in the anchor line and connecting chain the curves are used in the following manner: Step 1. Enter Figure 12 with the value of 80 knots for the wind, hence the total drag force on the spar buoy is found to be 5, 500 lbs. Note that this curve incorporates the affect of a 2 knot surface current. For some other condition, the drag equation, Eq. should be used instead. 6 Line tension at top (lbs) X(ft) d s (ft) l(ft) m(ft) Sag spq(ft) atop° ebot° Chain tension at spar buoy end (lbs) -400 22. 0 139. 0 136. 0 248. 0 85. 1 83. 7 4, 040 7, 460 -320 22.0 173.0 149.0 222.0 82.5 80.5 3,900 7, 500 -200 23. 6 234. 5 231. 5 167. 5 , 75. 0 71. 3 4, 660 7, 825 -160 33.5 236.0 238. 0 157.5 74.3 70. 2 4, 820 8,905 -1.20 43. 2 237. 5 249. 0 148. 5 73. 4 69. 4 5, 050 8, 030 -80 56. 1 235. 0 251. 5 138. 0 73. 0 69. 2 5, 130 8,190 -40 66. 0 234. 5 260. 0 132. 0 72. 5 68.4 5, 280 8, 300 0 80. 0 234. 5 270. 0 120. 0 71. 5 67. 3 5, 500 8, 490 +40 93. 6 226. 0 283. 0 106. 5 71. 5 66. 8 5, 800 8, 740 +80 108. 3 221. 5 300. 0 90. 6 69. 6 65, 4 6,180 8, 960 +120 124.0 211.0 311.0 80. 8 69.2 64.8 6, 400 9, 250 +160 140. 0 202. 5 325. 0 69. 0 68. 8 64. 5 6, 730 9, 460 +200 152. 0 190. 0 345. 0 53. 2 67. 6 63.5 7, 250 9, 910 +240 169.0 164.5 357.0 39.4 67.8 63.4 7, 650 10, 250 +320 214.0 108.5 435.0 11.8 63.0 58.8 9,500 11, 700 +400 267. 0 6. 5 531. 0 0. 5 56. 2 51.6 11, 800 14, 200 j i Table 2, Static Mooring Line Analogue Model Results 28 Step 2. With the total horizontal drag force now determined, we enter Figure 13 and obtain from the lower graph the horizontal displacement in the x direction of the spar buoy to be 320 ft. Step 3. From Figure 14 the vertical displacement of the spar buoy is 2. 45 feet. Step 4. From Figure 15 (upper graph) the attachment point of the left hand spring buoy is found to be located at a depth of 217. 3 feet below the surface while that of the right hand buoy is 22. 5 feet below the surface. Step 5. Figure 15 (lower graph) shows the horizontal span between the spar and spring buoy of the left hand side of the mooring to be 550 feet while the right hand side span is 350 feet. Step 6. In Figure 16 (upper graph) chain tension at the Totem end, left hand side, is found to be 9700 lbs; on the right side, 4200 lbs. Step 7. Anchor line tension at the spring buoy end is found from Figure 16 (lower graph) to be 12,100 lbs. on the left hand side, and 7, 600 lbs. on the right. Step 8. Knowing the line tension at the spring buoy end enables us to determine the angle that the anchor line makes with the bottom by means of Figure 17. On the left hand side the bottom angle is 58. 5°; on the right hand side 75.4°. 29 Example 2. We can now consider the case where the same wind and current as in Example 1 are now acting in the positive y direction, or perpendicular to the mooring line anchorage. With the addition of the Figures 18 through 20 the same previously used curves may be utilized to obtain a solution for this situation. The spar buoy will be displaced in the positive y direction, which results in a condition equivalent to having two left hand moorings acting under a condition of positive x displacement, as considered in Example 1. Step 1. The drag force is determined exactly as in the previous example. Step 2. Utilizing the drag force of 5, 500 lbs. we enter Figure 18 and obtain the y displacement of the spar buoy as 770 feet. Step 3. Using this value of y, we now obtain from Figure 19 the equivalent x distance, x', equal to 222 feet. Step 4. From Figure 20 the vertical displacement of the spar buoy is 3. 5 ft. From this point on, determination of buoy spans, sub surface depth, and line tensions, is identical to that used above for displacement of the spar buoy in the positive x direction. Only in this case we utilize the equivalent x' dimension for x and take values for the left hand portion of the mooring only. 30 200 100 90 so (f) 0 C 70 60 50 40 a) 30 20 10 1 2 3 4 5 6 7 8 9 10 Total Drag Force Including 2 Knot Current x 10 3 lbs. Fig. 12 Wind Velocity vs. Drag Force on Spar Buoy. 20 31 300 Fig. 13. Horizontal Displacement in X Direction 400 32 5.0 4l C 4.0 0 CO s -CO CL 3.0 0 yC (1) U 2.0 co a _ co U 1.0 L 0 X Displacement in ft. Fig. 14 Vertical Displacement of Spar Buoy vs X 33 400 30 0 200 100 100 200 300 400 X Displacement in ft. 600 L 0 0 4- 0 0 0 500 C 400 3 00 200 0 100 200 300 X Displacement in ft. 400 Fig. 15. Connecting Chain Span and Spring Buoy Depth vs. Horizontal (X) Displacement of TOTEM 34 CD C C 0 C (I) w 0 I— co C s(I) _c N X Displacement in Feet 15 14 13 12 11 10 9 8 04c:10 0____0 O O O O O 7 6 0 100 200 300 400 X Displacement in Feet Fig. 16. Line and Chain Tension vs. Displacement 90 80 70 ° goT 60 50 7 9 10 11 Line-Tension x 10 3 lbs. at spring buoy end Fig. 17. Line Tension vs. Anchor Line Bottom Angle 12 13 36 60 56 52 48 44 40 36 32 c•-■ O o 28 24 20 16 12 8 4 200 400 600 Y Displacement in ft. Fig. 18. Displacement vs. Horizontal and Vertical. Force Acting on Spar Buoy. 37 1200 1100 1000 900 800 700 600 500 400 300 200 100 100 200 300 400 500 = Equivalent X Displacement of Spar Buoy in Feet Fig.lq Y vs. X' Displacement 38 10 9 0 0 Wind 8 7 6 5 4 3 2 1 0 100 200 300 400 X' = Equivalent X Displacement of Spar Buoy in Feet. Fig.20 Vertical Displacement of Spar Buoy vs X' 39 EXPERIMENTAL CONSIDERATIONS Hydraulic model tests were conducted on the spar buoy and its mooring. The objective of these tests was to determine the dynamic behavior of both the spar buoy and mooring system over a wide range of wind, wave, and current conditions. Specifically sought were the frequency response of the buoy to waves, tension forces in the anchorage system under dynamic conditions, and the drag characteristics of the spar buoy. Model tests provided a means for evaluating several alternate two-point mooring line configurations. The relative ease with which models can be altered allowed for evaluation of such items as the opti mum point of attachment for the connecting chains to the spar buoy. Fr oude Modeling Law Since complete similarity between model and prototype is rarely ever possible, the investigator utilizing a model must design it with the view that it will reproduce those effects which are essential to his investigation. The primary interest was to determine the dynamic response of the system to wave action, which is a gravity phenomena. The model was therefore constructed and operated on the basis of Froude number criteria. The Froude number is a dimensionless quantity which expresses the ratio of gravity forces to inertia forces. Consequently, if the Froude number in both the model and the prototype are identical then similarity is achieved with respect to gravity forces. The Froude number is defined as N F= gL (17) where v = velocity g = gravity L= characteristic length 40 The model-to-prototype relationships derived from considering both the Froude law of similitude and Newton's second law are: F r I = = V = f = r t r r Sr = = 3 r 5 Lr 1/2 L r -1/2 L r 1/2 L r 5/2 L r L (18) (19) (20) (21) (22) (23) Where the subscript, r, refers to the ratio between model-toprototype, F is force, L is length, I is moment of inertia, V is velocity, f is frequency, t is time, and S is the wave spectrum ordinate. Using this criteria, in a model having a length scale ratio of 1: 100, a model wave with a period of 2. 0 sec. would correspond to a period of 20. 0 sec. in the prototype. A 6 inch model wave height would correspond to a 50 ft. wave in the prototype as it would scale directly in terms of the length ratio. Cauchy Modeling Law Plate and Nath (3) have shown that it is important to establish the natural frequencies of motion of the model in the same relative position of the wave spectrum. If structural vibrations are important, then the Cauchy number must be the same in both the model and the prototype. For mooring lines, this requires that the following relation he satisfied (24) 41 where A is the cross-sectional area of the line, E is its modulus of elasticity and p, is the per foot mass density of the line. The above ex- pression represents the speed of propagation of a disturbance in the line. However, because of the flexible arrangement of the two-point mooring and the fact that the lines are relatively short, it was not necessary to model the modulus of elasticity, E. The area, A, was modeled using copper wire and mass density, p., was thus approximated. Testing Facilities All of the model tests were conducted at the General Dynamics Electric Boat Towing Basin located at San Diego, California. The Towing Basin facility utilizes a channel which is 320 feet long by 12 feet wide and 6 feet deep. It is provided with an overhead model towing carriage. Periodic surface waves are produced by a hydraulically operated compound wedge wave generator. To simulate wind conditions, the basin has a mobile air-flow generator which can be moved along with the model when towed, or located in a stationary position. The facility is also equipped to measure and record both force and moment by means of strain gauge dynamometers. The mooring lines for the model were equipped with such instruments in order to determine the line tension in the anchorage when subjected to directional wave conditions. However, instrumentation difficulty occurred during the initial phase of the testing program and this part of the model investigation had to be abandoned. 42 Testing Procedure The model testing program consisted of 79 separate runs. The dynamic behavior of buoys and alternate mooring systems were recorded on 16 mm film, at a speed of 24 frames per sec. Fig. 21 shows a typical movie frame sequence. Wave height, length, buoy pitch and heave as well as other quantities of interest were then later obtained by analyzing the films. This was possible by utilizing a 1 inch square background grid which was located on the far side of the towing tank as a reference. During all runs, the position of the buoy and mooring system components relative to the camera and background grid was carefully noted since an optical correction had to be applied to convert the apparent motion recorded on the film to true motion. Variation in wave amplitude and period was achieved by altering the speed and amplitude of the wave maker. Wave period was checked by comparison of the recorded period with that observable in the movies. Buoy Models For the hydraulic model experiments, four buoy models were constructed at a scale of 1:100. Three of the TOTEM models, buoys 1, 2, and 3 are shown in Fig. 22. The fourth buoy, not shown,was a simple cylindrical spar buoy, referred to as buoy S. It was tested both as a matter of interest and to provide a basis for comparison of the dynamic behavior of the TOTEM buoy models. 43 6 I0 Fig. 21 Model tests of TOTEM buoy and its two-point mooring. 44 Buoy 1: This model was constructed to copy exactly, the center of gravity and moment of inertia characteristics of the prototype buoy. The model was entirely solid. During the initial testing sequence, the model warped, resulting in the longitudinal axis becoming slightly curved which in turn caused the model to rotate in an oscillatory manner about this axis when subjected to wave motion. Buoy 2: This model was constructed as a spare in the event it was needed. However, this model was never utilized in any of the mooring testing programs. Buoy 3: This model was also constructed to model the center of gravity and moment of inertia of the prototype but was built with a hollow stem section, provided with connected openings at the top and bottom to test their possible effect in reducing buoy heave created by imbalance of dynamic wave pressure with depth acting on the horizcntal surfaces of the buoy. Buoy S: This model was a solid, cylindrical spar buoy of constant cross section and was not designed to model a particular prototype. Buoy S': This model was a modification of Buoy S through the addition of added ballast at the lower end plus concentrated buoyancy in the form of buoyancy tanks attached to the cylindrical spar. The net result was a spar buoy with characteristics similar to that of the TOTEM. 45 2 Fig. 22. TOTEM buoy models, scale 1:100. From left to right are buoy models 2, 1 and 3 respectively. 46 All TOTEM models were carefully weighed and checked for balance to determine the degree to which they modeled center of gravity, center of buoyancy and the moment of inertia characteristics of the prototype. Adjustments were made when necessary. Each of the buoys were then placed in a tank of water and subjected to small vertical and lateral dis placements to determine their natural period of oscillation in both heave and pitch. The degree of damping exhibited by each of the models was observed by noting the time required to damp out all oscillations. Figures 23 and 24 (lower photo) show the TOTEM model and its mooring during testing at General Dynamics wave basin. Frequency Response in Heave and Pitch The data obtained for the hydraulic model phase of this investigation is presented in Tables 4 through 8 in the Appendix. Frequency response curves for both heave and pitch are plotted in Figures 25 through 51. The experimental setup is described below by run numbers to aid in interpreting frequency response curves. Runs 1-26 Buoys 1, 3, and S were allowed to float freely without restraint and then subjected to wave action to determine their frequency response heave and pitch. Runs 27-39 These run numbers were reserved for the dynamic evaluation of mooring line tensions. Because of instrumentation difficulties no appreciable data was obtained. 47 Fig. 23. General Dynamics Model towing basin with TOTEM model and two-point mooring subjected to wind drag. 48 Summer installation of TOTEM I off coast of Oregon. Sensors gear atop platform is the AN-GMT-5 Automatic Meterology Station on loan from NR L. Fig. 24 Underwater photo of 2-point moor model in General Dynamics wave basin under 100 kt wind force. Spring buoys plus energyabsorbing catenary lines keep surge loads off main anchor lines. 49 Runs 40-42 This series of tests were made on Buoy 2. The model was towed at a constant rate by means of the overhead carriage while waves generated in the basin impinged upon it. In all three runs a Karmanvortex street was noted to form behind the buoy. The towing velocities were; Run 40 - 0. 6 ft/sec; Run 41 - 1. 0 ft/sec; Run 42 - 0.3 ft/sec. Runs 43-47 A two-point mooring incorporating a weightless line connecting the spring buoys to the TOTEM buoy was tested. Buoy 3 was used for this series. The mooring system was oriented such that waves approached from the positive y direction or perpendicular to the anchorage point. Runs 48-49 The buoy mooring and orientation was the same as for Runs 43-47 except the wind was now allowed to blow against the buoy from the same direction as that of wave propagation. Runs 50-57 The buoy and mooring of the previous runs was rotated through an angle of 45 degrees so that wave approach was at an angle of 45 degrees to a vertical plane through the anchorage points. No wind was utilized. Runs 58-63 The mooring of the previous runs 50-57 was again rotated such that the wave advance direction was now parallel to the anchorage points (in the positive 50 x direction). In Runs 61-63 extremely violent jerking of both spring buoys was noted. Runs 64-69 This series of tests was conducted using Buoy 3 again, but now with weighted lines to simulate buoy connecting chains, as shown in Figure 4. Here the chain attachment collar was located at 0.12 feet below the top of the flotation tank. Wave advance was in the positive x direction parallel to the anchorage. Runs 70-73 All conditions were identical to that of runs 64-69 except that the chain, attachment collar was now placed at the top of the flotation tank. Runs 74-77 Same as previous Run 70-73, except that the chain attachment collar was placed at the bottom of the flotation tank. Runs 78-79 Here the attachment collar was placed at 0.12 feet above the bottom of the flotation tank. All conditions were the same as in previous runs except that wind was now allowed to blow on the model. 51 SUMMARY The natural frequencies of the buoy were determined by several means and are summarized below: Table 3. Summary of Determinations of Natural Period in Seconds Analysis Mode Experimental Displacement Curves Experimental Frequency Response Curves Numerical Model Heave 16.8 18 22 16.6 Pitch 14.3 22-28 37 19.6 Comparison of frequencies will show that the prototype frequencies in heave and pitch will not occur within the design wave spectrum. Therefore, if the design wave spectrum is a good representation of wave energy and frequency distribution for a ten-year storm, the mooring should have no resonance problems. If one compares Figures 38 through 43 (the frequency response curves for pitch and heave of Buoy 3 while moored) with Figures 27 and 27a (the same curves for the buoy unmoored), it can be seen that the mooring has little influence on the motion of the buoy. The static analogue study indicated that the mooring line and chain forces will be well within the allowable limits even at maximum conditions considered of 100 kt winds accompanied by 2 kt surface current. Reduction in freeboard of the TOTEM buoy will be within tolerable limits. Design information that was not obtained was the dynamic forces in the mooring line and chain. However, close study of movies taken 52 of the buoy and mooring models indicated no severe dynamic response of the system. Therefore, considering the sizable factor of safety, based on the static analysis, it was decided to deptoy the two-point mooring considered. The prototype installation will be instrumented to measure dynamic loads within its mooring chains. 53 RECOMMENDATIONS It is intended that the TOTEM buoy be moored in 1800 feet of water. At a date subsequent to the completion of the study contained herein it was decided to add 75 feet of 7/8" diameter cable from the spar buoy to the chain in order to facilitate installation procedures. It is felt that this will not influence the motion of this mooring in a detrimental way. The spring buoys will be submerged to a depth of 80. feet in the absence of wind or surface currents. They will be located at a distance of 550 feet to 590 feet from the spar buoy. Anchor weights of 25,000 pounds, submerged, should be adequate to prevent dragging of the anchor. If possible, an accelerometer should be installed on board the spar buoy to measure heave motion so that this motion can be filtered from the wave pressure measurement to be taken. Future analytical work should be directed toward determining the optimum size and lengths of chain for this type of mooring, development of a means to calculate the dynamic line and chain forces, the development of transfer functions to describe the response spectrum of any part of the system when the wave spectrum is specified, the determination of all drag and added mass coefficients, etc. The foregoing items are presented as examples. It is not the intention of the authors that future work be limited to them only. Indeed, future developments may well point out that other areas of research on this type of mooring will be most beneficial. 54 30 25 Runs 1- 26 20 15 10 • 0 0 0.5 1. 0 1. 5 f in cps Fig. 25 Frequency Response of Buoy 1 2.0 55 2:0 Runs 1-26 1. 5 A • MO • • Hv 1. 0 • • • .5 S o .5 1. 0 1. 5 f in cps Fig. 26 Frequency Response of Buoy 1 2. 0 56 2.0 _ Runs 1-26 1.5 Hv H • 1.0 • • • • 0.5 • • • 0 0 0.5 1.0 2.0 1.5 f in cps Fig. 27 Frequency Response of Buoy 3 57 30 25 20 7 15 10 5 • 1.0 1.5 f in cps Fig. 27 (a) Frequency Response of Buoy 3 (in pitch) 2, 0 58 30 Runs 1- 26 S 25 20 15 10 5 • • 0 0 0.5 1.0 1.5 f in cps Fig. 28 Frequency Response of Buoy S 2. 0 59 3.0_ • 2.5 Runs 1-26 • • 2.0 • • 1.5 • • • 1.0 • •• • • • • • 0.5 0 0 0.5 1.0 1.5 f in cps Fig. 29 Frequency Response of Buoy S 2.0 60 25 Runs 43-47 20 15 10 5 0 0 .5 1.0 1.5 f in cps Fig. 30 Frequency Response of Buoy 3 1 2.0 61 2 .0 _ Runs 43-47 1.5 Hv H 1.0 • 0.5 • • 0 0.5 1.0 1.5 f in cps Fig. 31 Frequency Response of Buoy 3 2.0 62 Runs 50-57 25 20 S 15 10 5 • • 0 0 0.5 1.0 1.5 f in cps Fig. 32 Frequency Response of Buoy 3 2.0 63 2.0 Runs 50 - 57 1.5 Hv H • 1.0 • • 0.5 • • 0.5 1.0 1.5 f in cps Fig. 33 Frequency Response of Buoy 3 2.0 64 25 Runs 51-54, 56, 57, 60, 63 20 15 10 - w • • 0 • 0 0.5 1.0 1.5 f in cps Fig. 34 Frequency Response of Buoy S 2. 0 65 2.0— Runs 51-54, 56, 57, 60, 63 1.5 Hv H 1.0 0 .5 • • • • • • • • 1 0.5 1.0 1.5 f in cps Fig. 35 Frequency Response of Buoy ST 2.0 66 25 Runs 58-63 20 15 10 0 0 0.5 1.0 1.5 f in cps Fig. 36 Frequency Response of Buoy 3 2.0 67 2.0 1.5 Runs 58-63 iv 1.0 • • 0.5 • • • • 0 0 0.5 1.0 1.5 f in cps Fig. 37 Frequency Response of Buoy 3 2.0 68 25 Runs 64-69 20 15 10 5 0 0.5 1.0 1.5 f in cps Fig. 38 Frequency Response of Buoy 3 2.0 69 2.0 Runs 64-69 1.5 Hv H 1.0 • • 0 .5 • • 0 0.5 1.0 1.5 f in cps Fig. 39 Frequency Response of Buoy 3 2.0 70 25 Runs 70-73 20 15 10 5 0 0 0.5 1.0 1.5 f in cps Fig. 40 Frequency Response of Buoy 3 2.0 71 2 .0 _ 1 .5 Runs 70-73 1.0 0.5 • • 0 0.5 1.0 1.5 f in cps Fig. 41 Frequency Response of Buoy 3 2.0 72 25 Runs 74-77 20 15 10 5 • 0.5 1.0 1.5 f in cps Fig. 42 Frequency Response of Buoy 3 2. 0 73 2.0 1.5 Runs 74-77 Hv H 1 .0 0.5 • • • 0 0 0.5 1.0 .1 2.0 1.5 f in cps Fig. 43 Frequency Response of Buoy 3 3. 0 2. 8 2. 4 2. 0 f 1.6 Hv rh = 0.46 • H • •S 1. 2 • 0. 8 i• • •. 0.4 • • • • • fifrh 0. 46 30 f rp = 0. 27 20 • 10 • '0 0 • • • • • 0 • 2 3 • 4 5 I 6 f/f rp Fig. 44 Normalized Frequency Response - Buoy 1 75 2.5 2.4 2.0 Hv 1.6 H j=.0.45 rh • • 1.2 • .8 • .4 • •• • 4.o 3.0 2.0 1.0 5.0 3.0 • • 2.0 P S • • f • rp = 0.26 • 1 .0 • • 0 1 2 3 • • 4 5 fifrp Fig.45 Normalized Frequency Response - Buoy 3 76 2. 8 2.4 2. 0 F Hy rh = 0.56 1.6 1. 2 .8 • • • 1.0 0 3. 0 2.0 f/f 4.0 rh 30 f rp = 0.30 20 • 10 • • • • 0 •• 1 • 2 3 4 5 6 f/f 7 8 rp Fig. 46 Normalized Frequency Response - Buoy S 5.0 77 H v (In.) H (In) Pitch 0 (In.) Fig. 47 Pitch and Heave vs. Wave Height of Buoy 1. 78 H v (in) 12 10 Pitch° 8 6 4 2 00 5 3 6 (In) Fig. 48 Pitch and Heave vs. Wave Height of Buoy 3 79 Hv (In.) 12 10 Pitch° 8 6 4 2 1 2 5 3 6 7 8 H ( In.) Fig. 49. Pitch and Heave vs. Wave Height of Buoy S. 80 LEGEND - Chain collar attachment location from top of floatation tank. 8 0 .12 = 7 0 0 .36 = 0 6 0) 0 0 O 5 0 Pitch 0 0 O 3 2 1 2 f/frp 4.0 0 3.0 0 Heave (In.) 0 2.0 1.0 O 1 2 3 5 f/frh Fig. 50. Normalized Frequency vs. Pitch and Heave for Various Chain Collar Positions. 81 0 8 0 0 e 7 6 1?)o 0 Wave Advance 0 - 0 = 90° 4 0 - 0 = 45° 0° e-0 9 O e e 2 O 0 4 3 5 f/frp 4.0 0 3.0 2.0 O 9 1 .0 O 0 O O 9 0 1 2 9 4 3 5 6 f?frli Fig. 51. Normalized Frequency vs. Pitch and Heave for Various Wind Directions. 82 REFERENCES 1. Ippen, A. T. , "Estuary and Coastline Hydrodynamics", Chapter 3 by C. L. Bretschneider, McGraw Hill, 1966 2. Kinsman, B. , "Wind Waves", Prentice-Hall, Englewood Cliffs, 1965 3. Plate, E. J. and Nath, J. H. , "Modeling of Structures Subjected to Wind Generated Waves", Proceedings of the ASCE and Society of Civil Engineering, London, September, 1968 4. Schlichting, H. , "Boundary Layer Theory", McGraw Hill, New York, 1960 5. Watts, J. S. and Faulkner, R. E. , "Designing a Drill Rig for Severe Seas", Ocean Industry, November 1968 TABLE 4 Natural and Resonant Frequency Response of Spar Buoy Models Buoy 1 Natural Frequency (Cycles/sec.)) Pitch - f Heave - fnh np 0.47 0.55 Resonant Frequency (Cycles/sec. ) Heave - f Pitch - f rp ' rh 0.35 0.46 ho z 3 0.36 0,263 for runs 70-73 0.57 0.26 0.45 S 0.29 0.59 0.30 0.56 TABLE 5 Hydraulic Model Data - Frequency Response of Buoy 1, 3, and S Wave Conditions Run No. Buoy T (sec) f (sec) H (ft) x (ft) Pitch Response S (radians) 5 1 3 S 2.15 2.15 2.15 0.465 0.465 0.465 0.0816 0.0816 0.0816 22.2 22.2 22.2 6 1 3 S 2.22 2.22 2.22 0.45 0.45 0.45 0.163 0.163 0.163 23.5 23.5 23.5 0.007 0.007 0.007 0.105 0.105 0.035 7 1 3 2.08 2.08 2.08 0.481 0.481 0.481 0.177 0.177 0.177 21.0 21.0 21.0 0.0084 0.0084 0.0084 0.096 0.070 0.070 P/S 0.0436 0.0436 0.0174 15.0 15.0 5.0 1 14 8.3 8.3 f/f • f/f Heave Response • Hv (ft) Hv/H f/f f f/f f r 0.99 1.28 1.61 1.32 1.77 1.53 0.1 0.1 0.125 1.22 1.23 1.48 0.83 0.80 0.77 1.00 1.02 0.82 0.97 1.25 1.57 1.29 1.73 1.50 0.1 0.183 0.166 1.17 1.12 1.39 0.81 0.78 0.76 0.97 1.00 0.80 1.03 1.34 1.68 1.37 1.85 1.60 0.216 0.175 0.274 1.22 1. 13 1.56 0.86 0.84 0.80 1.04 1.07 0.86 TABLE 5 - continued Hydraulic Model Data - Frequence Response of Buoy 1, 3 and S Run No. Buoy T (sec) f (sec) H (ft) Heave Response Pitch Response Wave Conditions ) (ft) S P (radians) P/S f/f np f/f rp Hv (ft) Hv/H f/f nh f/f rh 8 1 3 S 1.08 1. 08 1.08 0.93 0.93 0.93 0. 207 0. 207 0. 207 6.0 6. 0 6. 0 0. 0344 0. 0344 0. 0344 O. 113 0. 096 0.07 3. 28 2. 79 2.03 1.99 2. 58 3. 22 2.64 3. 56 3.08 0.066 0.066 0.0083 0.30 0.33 0.03 1.66 1.61 1. 56 2.01 2. 06 1.65 9 1 3 S 1.08 1.08 1.08 0.93 0.93 0.93 0.318 0.318 0.318 6.0 6.0 6.0 0.0530 0.0530 0.0530 0.131 O. 131 0.07 2.47 2.47 1.32 1.99 2.58 3.22 2. 64 3.56 3.08 0.083 0.075 0.025 0. 26 0.24 0.09 1.66 1.61 1.56 2.01 2.06 1.65 10 1 3 S 1.08 1.08 1.08 0.93 0.93 0.93 O. 126 0. 126 0. 126 6.0 6.0 6.0 0.021 0.021 0.021 0.0871 0.0785 0.0261 4. 15 3.74 1.24 1.99 2.58 3.22 2.64 3.56 3.08 0.05 0.05 0.00 0.36 0.41 0.00 1.66 1.61 1.56 2.01 2.06 1.65 11 1 3 S 1.08 1.08 1.08 0.93 0.93 0.93 0.0601 0.0601 0.0601 6.0 6.0 6.0 0.010 0.010 0.010 0.035 0.0436 0.00 3.5 4.36 0.00 1.99 2.58 3. 22 2.64 3.56 3.08 0.0166 0.0166 0.00 0.30 0.29 0.00 1.66 1.61 1. 56 2.01 2.06 1.65 12 1 3 S 0.80 0.80 0.80 1.25 1.25 1. 25 0.158 O. 158 0.158 3.3 3.3 3. 3 0.048 0.048 0. 048 0.0785 0.061 0. 035 1.63 1.27 0.73 2.69 3.48 4.36 3.56 4.82 4. 17 0.025 0.025 0.00 0.17 0.02 0.00 2.25 2. 18 2. 10 2.72 2.78 2.23 13 1 3 S 0.54 1.86 0.0645 1.47 0.044 0.035 0.80 4.00 5.33 0.0083 0.06 3.35 4.05 0.54 1.86 0.0645 1.47 0.044 0.0175 0.398 6.5 6.21 0.00 0.00 3.14 3.32 1 3 S 0.476 0.476 0.476 2.1 2.1 2. 1 0.0143 0.0143 0.0143 1.15 1.15 1. 15 0.0124 0.0124 0.0124 0.0175 0.0175 0.00 1.41 1.41 0.00 4.52 5.70 7.35 6.00 8.07 7.00 0.00 0.033 0.0083- 0.29 2.4 0.49 3.78 3.67 3.54 4.57 4.68 3.76 . 14 TABLE 5 - continued Hydraulic Model Data - Frequency Response of Buoy 1, 3 and S Pitch Response Wave Conditions Run No. Buoy T (sec) f (sec) H (ft) X. (ft) S P (radians) P/S np f/f Heave Response rp Hv (ft) Hv/H f/f nh f/f rh 0.94 1.15 0.94 1.27 1.10 0.158 0.167 0.183 1. 03 1.09 1.23 0.59 0.57 0.56 0.72 0.73 0.59 1.76 0.71 0.94 1.15 0.94 1.27 1.10 0.158 0.167 0.183 0.76 0.80 0.90 0.59 0.57 0.56 0.72 0.73 0.59 0.0838 0.0785 0.0436 14.2 13.3 7.41 0.80 1.03 1.29 1.06 1.42 1.23 0.192 0.192 0.217 1.00 1.01 1.17 0.66 0.64 0.62 0.80 0.82 0.66 0.0088 0.0088 0.0088 0.105 0.096 0.061 11.9 10.9 6.93 0.94 1.26 1.54 1.26 1.69 1.47 0.217 0.217 0.217 1.14 1.10 1.31 0.96 0.77 0.74 0.96 0.60 0.79 47.0 47.0 47.0 0.00379 0.00379 0.00379 0.0662 17.4 0.0838 22.1 18.4 0.07 0.58 0.75 0.94 0.77 1.04 0.90 0.175 0.175 0.175 1.21 1.21 1. 29 0.48 0.47 0.46 0.59 0.60 0.48 0.243 0.243 0.243 47.0 47.0 47.0 0.00517 0.00517 0.00517 0.58 0.75 0.94 0.77 1.04 0.90 0.217 0.217 0.242 0.89 0.89 0.95 0.48 0.47 0.46 0.59 0.60 0.48 0.28 0.28 0.28 0.216 0. Z16 0.216 45.0 45.0 45.0 0.0048 0.0048 0.0048 0.0384 0.0523 0.0175 8.0 10.9 3.65 0.60 0.78 0.98 0.80 1.08 0.93 0.30 0.242 0.15 1.38 1.12 0.68 0.51 0.49 0.47 0.61 0.62 0.50 0.29 0.29 0.29 0.147 0.147 0.147 43.2 43.2 43.2 0.0034 0.0034 0.0034 0.035 0.061 0.07 10.3 18.0 20.6 0.62 0.81 1.01 1.12 0.97 0.158 0.158 0.117 1.09 1.12 0.79 0.52 0.50 0.49 0.63 0.64 0.52 15a 1 3 S 3.33 3.33 3.33 0.33 0.33 0.33 0.153 0.153 0.153 42.0 42.0 42.0 0.00364 0.00364 0.00364 0.0175 0.0436 0.0871 4.81 12.0 2.39 15b 1 3 S 3.33 3.33 3.33 0.33 0.33 0.33 0.208 0.208 0.208 42.0 42.0 42.0 0.00495 0.00495 0.00495 0.0175 3.54 0.0871 16 1 3 S 2.70 2.70 2.70 0.37 0.37 0.37 0.191 0.191 0.191 32.5 32.5 32.5 0.00588 0.00588 0.00588 17 1 3 S 2.28 2.28 2.28 0.44 0.44 0.44 0.220 0.220 0.220 25.0 25.0 25.0 18a 1 3 S 3.70 3.70 3.70 0.27 0.27 0.27 0.178 0.178 0.178 181) 1 3 S 3.70 3.70 3.70 0.27 0.27 0.27 1 3 3.58 3.58 3.58 1 3 S 3.44 3.44 3.44 20 f/f 0.71 e TABLE 5 - continued Hydraulic Model Data - Frequency Response of Buoy 1, 3 and S Buoy T (sec) f (sec) H (ft) Heave Response Pitch Response Wave Conditions Run No. k (ft) S P (radians) P/S f/f np f/f rp Hv (ft) Hv/H f/f nh f/f rh 1 3 S 1.33 1.35 1.35 0.74 0.74 0.74 0.319 0. 319 0.319 9.3 9.3 9.3 0.0343 0. 0343 0.0343 O. 131 0. 122 0.07 3.82 3.56 2.04 1.54 2.06 2.58 2.84 2.46 0.075 0. 1 0. 133 0.24 0.32 0.42 1.33 1. 29 1. 24 1.61 1.64 1.32 22 1 3 S 1.79 1.79 1.79 0.56 0.56 0.56 0. 285 0. 285 0.285 15.8 15.8 15.8 0. 018 0. 018 0.018 0. 131 0. 122 0. 165 7. 27 6.78 9. 16 1. 20 1. 56 1.96 2. 16 1.87 0.308 0.300 0.675 1.08 1.06 2.36 1. 00 0.98 0.94 1. 22 1.21 1.00 23 S 1.69 0.59 0. 228 14.3 0.0159 0.201 12.6 2.07 1.97 0.582 2.56 0.99 1.05 24 S 1.89 0.53 0.215 17.6 0.0122 0.165 13.5 1.86 1.77 0.482 2. 22 0.89 0.94 25 S 1. 79 0.56 0. 227 15. 8 0.0144 0. 244 16.9 1.96 1. 87 0.608 2.68 0.94 1. 00 26 S 0.90 1. 11 O. 182 0.0438 0.0523 3.88 3.70 0.0166 0.78 1.86 1.98 21 4.15 1. 19 TABLE 6 Hydraulic Model Data Two-Point Mooring with Weightless Line Connecting Spring Buoys to TOTEM Wave Conditions Run No. 0=90° 43 44 45 46 47 48 49 Buoy T (sec) f (sec) H (ft) Pitch Response X (ft) S P P/S Heave Response f/f f f 1.03 1.39 2.07 3.37 5.60 ------- Hv (ft\ Hv/H f/f 1. 06 1.43 2. 12 3.43 5.70 ------- 0. 166 0.266 0.083 0.89 1.06 0.34 0.14 0.00 ------- 1.54 1. 14 0.77 2. 10 3.50 ------- 0.82 1.11 1.64 2.67 4.44 ---- f/frh Wind Direction 3 2.70 2.00 1. 35 0. 83 0.50 ---- 0.37 0.50 0.74 1. 20 2.00 ---- 0. 189 0. 250 0. 248 0. 162 0.0555 0.133 0.133 32.5 19.5 9.3 3.55 1.28 1. 28 1. 28 0. 0058 0.0128 0.0267 0.0457 0.0433 0.0104 0.0104 0. 0785 0. 131 0. 105 0.052 0.0174 13. 5 10.24 3.93 1. 15 0.402 0.37 0.37 0.57 0.74 0.96 0.96 1. 35 1.66 0. 201 0.336 0.350 0.312 0. 295 0. 303 0. 144 0.095 32.5 32.5 15.4 9.3 5.6 5.6 2.8 1.85 0.0062 0.0100 0.0227 0.0335 0.0527 0.0540 0.0514 0.0512 0.0436 O. 122 0. 157 O. 105 0. 139 0.096 0. 052 0.052 7.06 12.2 6.91 3. 13 2.64 1. 78 1.02 1.02 1.03 1.03 1.60 2.07 2.67 2. 67 3.77 4.64 1.06 1.06 1.63 2. 12 2.74 2. 74 3.85 4.71 0. 175 0.30 0.358 O. 108 0.075 0.075 0.017 0.008 0. 86 0.90 1.02 0.36 0.25 0. 26 0. 12 O. 12 1.54 1.54 1.00 0.77 1.68 1. 68 2. 37 2.90 0.82 0.82 1.27 1.64 Z. 12 2. 12 2.94 2.68 0.37 0.57 0.67 0. 248 0.362 0.347 32.5 15.4 11.5 0. 0076 0.0235 0.0302 0. 087 0. 139 0.096 11.40 5.92 3.18 1. 03 1. 60 1.86 1.06 1.63 1.91 0. 208 0.275 0.142 0.84 0.76 0.40 1. 54 1.00 1.16 0.82 1. 27 1.48 0. 80 0.93 0. 259 0. 212 8.0 6.0 0.0324 0.0353 0. 105 0.0698 3. 24 1.975 2. 24 2.58 1. 13 2.38 2.64 0.075 0.05 0. 198 0. 27 0. 24 4.0 1.40 1.62 1.78 2. 04 0.0495 0.0785 1.585 3. 16 3. 23 0.033 O. 18 1.98 2.51 -- 0=45° Wind Direction 50 51 52 53 54 55 56 57 3 2. 70 2.70 1.74 1. 35 1.05 1. 05 0.74 0.60 0=0° Wind Direction 58 59 60 61 62 63 3 2.70 1.75 1.50 1. 25 1.08 0.88 TABLE 7 Hydraulic Model Data Two-Point Mooring with Weighted Lines Connecting Spring Buoys to TOTEM Run No. Buoy T (sec) f (sec) f/f Hv (ft) Hv/H f/f 1.06 1.63 1.91 2.38 2.63 3. 23 0.216 0.308 O. 166 0.10 0.067 0.05 0.91 0.91 0.52 0.41 0.30 0. 26 1.54 1.00 1.16 1.40 1.62 1.98 0.82 1.27 1.48 1.78 2.04 2.51 1.40 3.04 3.51 4.30 1.06 2.38 2.63 3.23 0. 208 0.125 O. 092 0.042 0. 83 0.46 O. 35 0.20 1.54 1.40 1.62 1.98 0.82 1.78 2. 04 2.51 2. 24 3.49 3. 16 2. 58 2.38 3.58 3.23 2.63 0. 117 0.042 0.042 0.083 0.43 O. 13 0.20 0.31 1.40 2.20 1.98 1.62 1.78 2.78 2.51 2.04 f/f ), (ft) S P (radians) P/S 2.39 0.336 0.321 0. 246 0. 238 0. 199 32.5 15.4 11.5 8.0 6.0 4.0 0.00735 0.0218 0.0279 0.0308 0.0397 0.0498 0.113 0.113 0. 122 0.087 O. 105 0.086 15.4 5. 18 4.37 2.83 2.65 1.73 1.03 1.60 1.86 2.24 2.58 3. 16 0. 252 0.263 0. 259 0.208 32.5 8.0 6. 0 4.0 0. 00775 0.0328 O. 0432 0.0520 0.0785 10. 1 2.92 0.096 2. 22 O. 096 1.01 0.0524 0. 0334 0. 0864 0.0560 0.0467 0.096 0.096 0.0785 0. 113 2.87 1. 11 1.40 2.42 H (ft) Heave Response Pitch Response Wave Conditions np f/f rp nh rh Chain attachment collaz located 64 65 66 67 68 69 3 2.70 1.75 1.50 1.25 1.08 0.88 0.37 0.57 0.67 0.80 0.93 1. 13 Chain attachment collar located 70 71 72 73 3 2.70 1.25 1.08 0.88 0.37 0.80 0.93 1. 13 Chain attachment collar located 74 75 76 77 3 1.25 0.80 0.88 1.08 0.80 1.25 1. 13 0.93 0. 267 0.285 0.224 O. 280 8. 0 3.3 4.0 6.0 90 Table'■8 Frequency Response of Buoy S' Run No. f (sec) 51 52 53 54 56 57 60 63 0.37 0.57 0.74 0.995 1.35 1.66 0.666 1.13 S P 0.0089 0.02 0.0334 0.0522 0.0512 0.0512 0.0302 0.0498 0.061 0.174 0.227 0.139 0.0697 0.017 0.21 0.096 P/S Hv/H 6.85 8.72 6.80 2.66 1.36 0.33 6.95 1.93 0.28 0.39 0.31 0.22 0.08 0.05 0.37 0.24