Homework #4 (due September 25)
advertisement
")
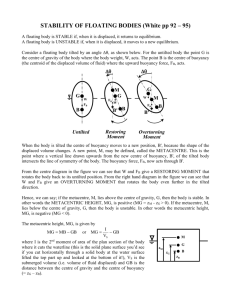
SYSTEM DYNAMICS (ME 344) Homework #4 TWO PAGES Due in class on Tuesday 9/25/2012 In problem #1 and #2, find the function f(t) by taking the inverse Laplace Transform of the given function F(s). Perform Partial Fraction Expansion by hand, being sure to show all work. 1. F(s) = 3(s + 4) s(s + 2)(s + 3) 2. F ( s) = 2s + 10 ( s + 1) 2 ( s + 4) 3. Verify your results from #1 and #2 using MATLAB (or other software of your choice). For problems #4 and #5, solve the given differential equations for x(t) using the Laplace Transform method. Perform the needed Partial Fraction Expansions by hand, being sure to show all work. 4. x˙˙ + x = sin(3t) with no initial conditions ( x(0) = 0 and x˙ (0) = 0) 5. x + 4x = f (t) with no initial conditions ( x(0) = 0 and x˙ (0) = 0) and where f (t) is a step ì 0 for t < 0 function of amplitude 4, that is, f (t) = 4us (t) = í î 4 for t ³ 0 6. Verify your results from #4 and #5 using MATLAB (or other software of your choice). 7. A 30 kg block is pushed along a flat surface by a force f(t). The surface is covered in a film of oil, resulting in viscous damping that can be modeled using a linear damping coefficient b = 5 Ns/m. Derive the equation of motion and then find the transfer function X(s)/F(s). Then, solve for the position x(t) when the force f(t) is: x(t) f(t) 30 kg a) an impulse function of magnitude 60 Ns applied at t = 0. b) a step function of magnitude 3 N applied at t = 0. 8. Use MATLAB (or other software of your choice) to simulate the system in problem #7. Generate plots of the first 50 seconds of the response to each of the following inputs (the first two can be used to verify your answers to problem #7): a) an impulse function of magnitude 60 Ns applied at t = 0. b) a step function of magnitude 3 N applied at t = 0. c) a constant 3 N force applied for a duration of 20 s (i.e., from t = 0 to 20). Hint: the response to an impulse or step function of magnitude A is the response to a unit impulse or unit step, multiplied by the factor A. In MATLAB, you can use the “[x,t_out]=impulse(sys,t)” form, for example, and then “plot(t_out, A*x)” where A is the relevant magnitude. Be sure to label your axes and give each plot an appropriate title. 9. The cylindrical buoy shown at right is floating in water. Assume that the center of gravity is low enough that bobbing motion of the buoy can be considered to be entirely vertical. Archimedes’ principle states that the buoyancy force on an object is equal to the weight of displaced liquid (in this case, the density of water 1.94 slug/ft3 times g times the submerged volume). The cylinder has a weight mg = 1200 lb (where g = 31.17 ft/s2 in English units) and a diameter D = 2 ft. Derive an equation of motion for the buoy in terms of the displacement x measured from the buoy’s equilibrium position, and then examine your equation to determine the natural frequency of the buoy. Hint: At equilibrium, there is just enough buoyancy force to balance the weight of the buoy. Thus, the height of the submerged portion of the buoy at any instant is y = yeq + x where yeq is a constant that is the right amount to make the buoyancy force balance the weight. You should be able to obtain an equation of motion of the form mx + kx = 0 where the coefficient k will depend on the various parameters given in the problem. 10. Consider the system shown at right, in which a mass m is raised by applying a torque T to turn a drum of radius R and moment of inertia (about its central axis) of I. The rotation of the drum is resisted by a linear rotational damping with coefficient cT. Assume that the applied torque T is composed of a static portion mgR sufficient to balance the weight of the load and an additional portion Ta that may be a function of time, that is, T = mgR + Ta (t) . Write a differential equation for the system with the additional applied torque Ta as input and the mass’s speed v as the response variable. Then convert that equation into a transfer function V (s) / Ta (s) . Hint: the angular speed (and acceleration) of the drum are related to the linear speed (and acceleration) of the load by the radius of the drum R. You’ll need to combine kinetics equations for the drum and load in order to eliminate all variables except Ta and v (and derivatives of v).