Cardiac Cycle Phase Estimation in 2-D Echocardiographic Images Using Support Vector Machine
advertisement

International Journal of Engineering Trends and Technology (IJETT) – Volume 13 Number 2 – Jul 2014
Cardiac Cycle Phase Estimation in 2-D
Echocardiographic Images Using Support Vector
Machine
Sudeep M S
MTech Scholar, Musaliar College of Engineering and Technology
Kerala, India
Abstract- Proposes a new method to estimate the cardiac cycle
phases in 2-D Echocardiographic images is the first step in
cardiac volume estimation. Focus on analyzing the Arial systole
and diastole events by using the geometrical position of the
mitral valve and a set of three image features. The proposed
algorithm is based on a tandem of image processing methods
and support vector machine as a classifier to robustly extract
anatomical information. To recognize the cardiac phases set of
image features is proposed and derived. This approach helps to
estimate the cardiac phase in double quick time compare to
other methods. The algorithm is implemented as computer
aided diagnosis (CADi) software. A dataset of 200 images that
include both normal and infarct cardiac pathologies were used.
Identify an accuracy of 90%and a 2±0.3 s in terms of execution
time of CADi application in a cardiac cycle estimation task. The
main contribution of this paper is to propose this hybrid method
and a set of image features that can be helpful for automatic
detection applications without any user intervention. The results
of the employed methods are compared with other previous
methods in terms of processing time
Keywords: - Support Vector Machine, Cardiac Cycle, Computer
Aided Diagnosis
1.
INTRODUCTION
The incidence of chronic heart failure in humans is very
high and as a result, the morbidity and mortality are also very
high in all countries, regardless of the economic development
level. The data on mortality caused by the chronic heart
failure reveal that the five-year mortality rate remains at an
alarmingly high level of 50%. So Heart failure is a major
clinical problem. Echocardiography represents a noninvasive
procedure to examine the heart and the surrounding blood
vessels. By echocardiography, the physicians visually inspect
the four cardiac cavities (left and right atria, left and right
ventricle), the inferior vena cava, the aorta, the mitral valve,
the aortic valve, the tricuspid valve, and the pulmonary valve.
The image of the left ventricle (LV) and the analysis of the
cardiac cycles are of great importance to cardiac research and
represent a valuable tool to clinically assess cardiac health.
ISSN: 2231-5381
Based on the general finding, proposes a new
algorithm able to accurately estimate the cardiac cycle phases
in Echocardiographic images without involving any manual
tracing of the boundaries for segmentation process. The
hybrid method proposed in our study is the first approach of
such a technique. Attention was mainly focused on the left
ventricular cardiac chamber. The purpose of the study was to
increase the recognition ability of the algorithm and
processing time, so that it correctly discerns between atrial
systole and atrial diastole. Detailed cavity geometry and the
position of the mitral valve were assessed using denoising,
binarization, and edge detection techniques. The denoising
operation was performed in the framework of additive
Gaussian and multiplicative noise described by Rayleigh
distributions. The goal is not to develop a new denoising
algorithm but to optimize the formalism for denoising images
and to preserve anatomical details relevant from the clinical
point of view. To characterize the cardiac cycle phases, an
original set of features was proposed and derived. The mitral
valve position was described in terms of three image features:
1) the number of boundary pixels belonging to an identified
boundary; 2) the height of the mobile rectangle mask which
enclosed the useful contour pixels; and 3) the horizontal size
of object’s boundary inside the mask. Image features were
defined and computed for each image in our dataset by using
edge detection. Finally, a support vector machine (SVM) has
been trained as a classifier for effective detection of the
mitral valve position in the Echocardiographic images. This
method does not require the user intervention. Moreover, this
hybrid method allows improving the time efficiency. The
main reason underlying this study arises from the finding that
if the mitral valve annulus fails to properly connect with the
leaflets, then the functioning of the heart may be
compromised resulting in the mitral valve regurgitation and
stenosis heart affection
SVM is supervised learning models with associated
learning algorithms that analyze data and recognize patterns.
Given a set of training examples, each marked as belonging
http://www.ijettjournal.org
Page 80
International Journal of Engineering Trends and Technology (IJETT) – Volume 13 Number 2 – Jul 2014
either of two categories.SVM training algorithm builds a
model that assigns new examples into any of the two
categories.
dropping out the high-frequency components and it is
commonly used in edge detection when the algorithms are
sensitive to noise
II. PROPOSED SYSTEM OVERVIEW
( , )=
(
( , )
.
.
)
A. Experimental Algorithm
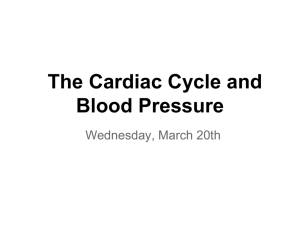
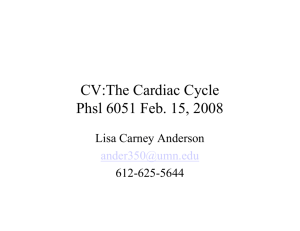
Fig. 1 presents the flowchart of the existing
algorithm. The algorithm contains three parts. In the first
part, the images are processed using the denoising,
binarization, and segmentation techniques. A set of image
features was extracted in the second part. In the third part,
each component of the feature vector was assessed for both
the analyzed cardiac phases, and then the images belonging
to our database were classified by the instrumentality of an
SVM. The cardiac cycle phase estimation is performed in
apical two-chamber long-axis 0◦ view (LAX0) of 2-D
Echocardiographic images.
( , ) =
( , )=
1
′
( , )
(
( , )
.
.
)
Here, f(x,y) denotes the processed image, M and N denote the
image resolution, F(u,v) is the FT result, H(u,v) is the filter
transfer function corresponding to the GLPF, ′(u,v) stands
for the result of convolution between F and H functions,
g(x,y) is the inverse FT (that is the denoised image), D(u,v)
represents the distance from the point (u,v) to center of filter,
and
represents the parameter that is a nonnegative number
associated with the standard deviation. The quality of the
denoising process with FT and GLPF is strongly dependent
on the value of the
parameter.
C. Binarization Methods
Otsu’s global Binarization method was employed in
order to automatically obtain a single optimal binarization
threshold. This technique divides the histogram of the image
into two classes and calculates the optimum threshold T that
separates these two classes so that their combined spread
(intraclass variance) to be minimal.
D. Image Segmentation and Edge Detection
Fig 1 Flow chart of proposed system
B. Image Denoising
Removal of noise is shown to be a crucial step in
imaging cardiac disease diagnosis. An efficient method for
accurate noise filtration of the Echocardiographic images is
based on the Fourier transform (FT) and Gaussian low-pass
filter (GLPF). Here, the image processing is a three-step
process: 1) the FT (1) is performed; 2) filtering the frequency
components by using the GLPF (2); and 3) the inverse FT (3)
is computed in order to reconvert the image to the spatial
domain. Smoothing is achieved in the frequency domain by
ISSN: 2231-5381
The Canny detector is widely considered as being
the optimal boundary detector. The contour map of the
studied object is computed using an algorithm consisting of
five steps: smoothing (the noise can be removed in an
effective way), finding the gradients (we are looking for
gradients of large magnitudes), the nonmaximum suppression
(edges are marked using the local maxima), double
thresholding (the possible edges are identified by
thresholding), and the hysteresis (the chosen edges are
validated by exclusion of the weak or not connected
edges).As is well known, the Canny detector is looking for
intensity discontinuities but it provides too many possible
http://www.ijettjournal.org
Page 81
International Journal of Engineering Trends and Technology (IJETT) – Volume 13 Number 2 – Jul 2014
boundaries. It produces spatially extended outputs and we
used these outputs to reduce the search space by selecting a
satisfactory contour. A threshold value N is chosen in order
to hold the core boundary (when the contour pixel number is
higher than N) and to discard those boundaries classified as
isolated (for which the contour pixel number is lower than
N). By successive removal of isolated boundaries, the image
is diluted and simplified. The optimal value of threshold N
was established by maximizing the expected accuracy of
CADi. The supreme goal is to have an algorithm, which
knows where one object stops and another starts.
that the set of points x mapped into any hyperplanes can be
quite convoluted as a result, allowing much more complex
discrimination between sets which are not convex at all in the
original space.
E. Support Vector Machine
1) Definition
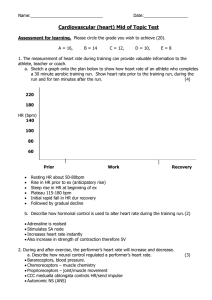
Support vector machine constructs a hyperplanes or
set of hyperplanes in a high- or infinite-dimensional space,
which can be used for classification, regression, or other
tasks. Intuitively, a good separation is achieved by the
hyperplanes that has the largest distance to the nearest
training data point of any class (so-called functional margin),
since in general the larger the margin the lower
the generalization error of the classifier.
Fig 2 Hyper plane separates training examples
2) Optimal Separating Hyper Plane
3) Linear SVM Classifiers
Whereas the original problem may be stated in a
finite dimensional space, it often happens that the sets to
discriminate are not linearly separable in that space. For this
reason, it was proposed that the original finite-dimensional
space be mapped into a much higher-dimensional space,
presumably making the separation easier in that space. To
keep the computational load reasonable, the mappings used
by SVM schemes are designed to ensure that dot
products may be computed easily in terms of the variables in
the original space, by defining them in terms of a kernel
function K(x, y) selected to suit the problem.The vectors
defining the hyperplanes can be chosen to be linear
combinations with parameters
of images of feature
vectors that occur in the data base. With this choice of a
hyperplanes, the points in the feature space that are
mapped into the hyper plane are defined by the
relation: ∑ ∝ ( , ) =
Note that if K(x,
y) becomes small as y grows further away from x, each term
in the sum measures the degree of closeness of the test
point
to the corresponding data base point . In this way,
the sum of kernels above can be used to measure the relative
nearness of each test point to the data points originating in
one or the other of the sets to be discriminated. Note the fact
ISSN: 2231-5381
Let ( , ) 1≤ i ≤N be a set of training
examples, ∈ Rn and belongs to class labeled by ∈ {−1,
1}.The aim is to carry out the equation of a hyperplanes
which divides the set of examples such that all the points
with the same label are on the same side of the hyperplanes.
This means find w and b such that
(w.
+ b) > 0, i = 1. . . N
1
If there exists a hyper plane satisfying eq (1), the set is said to
be linearly separable. In this case, it is always possible to
rescale w and b such that
min
1 < i < N
(w.
+ b) > 0, i = 1. . . N
2
i.e. such that the closest point to the hyper plane has a
distance of 1/ ||w||. Then, eq (1) becomes
(w. + b) ≥ 1
Among the separating hyperplanes, the one for which the
distance to the closest point is maximal is called optimal
separating hyper plane (OSH). Since the distance to the
http://www.ijettjournal.org
Page 82
International Journal of Engineering Trends and Technology (IJETT) – Volume 13 Number 2 – Jul 2014
closest point is 1/ ||w||, finding the OSH amounts to solve the
following problem:
1/2 w.w
The quantity 2/ ||w|| are called the margin and thus, the OSH
is the separating hyper plane which maximizes the margin.
The margin can be the measure of difficulty of the problem:
the smaller the margin is the more difficult the problem. If
the margin is larger, expect better generalization. (Figure 2)
4) Non Linear SVM Classifiers
Precision =
Here P denotes the total number of “positive” images and N
the total number of “negative” images. Here, we considered
the diastole cases as “positive condition” and the systole
cases as “negative condition.” The correct diagnosis of a
diastole image as “diastole” is a true-positive case (TP) and
the incorrect diagnosis of diastole image as “systole” is a
false-negative case (FN).
III. EXPERIMENTAL RESULTS
The linear SVM can be readily extended to a
nonlinear classifier by first using a nonlinear operator Ф(.) to
map the input pattern into a higher dimensional space Ή. The
nonlinear SVM classifier so obtained is defined as
In terms of the transformed data it is linear Ф(x), but
nonlinear in terms of the original data x Ɛ
.
The experimental images were divided into two sets
corresponding to two analyzed cardiac cycles (systole and
diastole) by one expert radiologist physician. The expert
manually labeled the images. This activity is labor-intensive
and tiring. Note that the expert’s accuracy was 100%.
hundred systolic images and hundred diastolic images were
used. The experimental Echocardiographic images came
from a blend of healthy and cardiac patients that suffer from
myocardial infarction.
Following nonlinear transformation, the parameters of the
decision function f(x) are determined by the following
minimization:
All experimental images were denoised using the FT
and GLPF. Fig. 3 shows the denoised images using FT and
GLPF
f(x) =
Ф(x) +b
min J(w,) = ½ ||w.w|| + C ∑
subject to
(
Ф( ) +b) >= 1-
>=0; i=1, 2 …l
F. CADi Application
The CADi applications are tools developed to help
physicians to detect various diseases and to reduce the
workload of radiologists. One of most used feature of the
CADi applications is the efficiency. The following
parameters are considered when the efficiency of the CADi is
evaluated: the sensitivity, the specificity, the precision and
accuracy
sensitivity = Specificity =
Accuracy =
Fig. 3. Denoising results using FT and GLPF. (a) Atrial diastole. (b) Atrial
systole
Fig. 4 presents the binarized images using the
automatic Otsu method. The binarization produces satisfying
results and the myocardium walls are optimally highlighted.
TP
N
TN
N
TP + TN
P+N
Fig.4. Images binarized using the Otsu method. (a) Atrial diastole. (b) Atrial
systole.
ISSN: 2231-5381
http://www.ijettjournal.org
Page 83
International Journal of Engineering Trends and Technology (IJETT) – Volume 13 Number 2 – Jul 2014
Fig. 5 shows the edges detected by using the canny
method. Most of the major edges were detected but also lots
of details have been emphasized and this can hamper the
subsequent processing. In order to identify the position of the
mitral valve, these images were scanned with a horizontal
rectangle window having height H.
Fig.5. Edge information by canny detector and the rectangular scanning
window. (a) Diastole. (b) Systole.
Using the rectangular mask two values are
calculated p1 and p2.this rectangular mask is considered as
ROI. ROIs considered in this analysis contain the maximum
number of contour pixels (p1 value). For diastolic phases,
this condition is always accomplished when the mask scans
the mitral valve in closed position. In the case of the systolic
phase, this condition makes the mask not to stop when it
scans the valve in open position. The mask will detect those
regions containing the higher number of contour pixels. This
drawback is minimized by using the second feature, p2,
which helps the SVM to classify the images as diastole for
higher value of p2 and as systole for lower value of p2.
Significantly smaller p2 and significantly larger p1
values were observed. An ideal recognition process of
diastolic versus systolic phases must be identified. The
recognition and classification results are strongly influenced
by N (the threshold of canny edge detector) and H (the height
of sliding window) parameters.
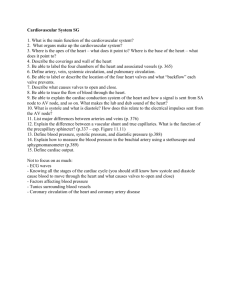
In existing system time taken to identify the cardiac
phase is very high but in proposed system processing time is
very less compared existing system. It is shown in fig 6.
Fig 6 Difference in processing time with ANN and SVM and CADi
efficiency.
ISSN: 2231-5381
This study shows that the SVM enables an accurate
distinction between diastole and systole. During the
recognition process, 200 test images were investigated and
they were equally divided between diastolic and systolic
phases. 96 diastolic images were correctly recognized as TP,
4 diastolic images were incorrectly recognized as FN, 95
systolic images were correctly recognized as TN, and 5
systolic images were incorrectly recognized as FP. 95
diastolic images were correctly recognized as TP, 5 diastolic
images were incorrectly recognized as FN, 96 systolic images
were correctly recognized as TN, and 4 systolic images were
incorrectly recognized as FP. The recognition failing rate is
almost equally distributed between healthy and infarcted
patients so that a possible pathology does not affect the
accuracy of results provided by CADi. When taking into
account only the diastolic phase, in the first scenario the
diagnostic performance of SVM for the differentiation is
95% accurate. In the case of systole, the differentiation is
95.5% accurate. For the second scenario, the sensitivity is
95% and the specificity is 96% (shown in fig 6). This finding
is readily explained by the entirely different appearance of
the mitral valve in closed position. On the other hand, the
performance of SVM for differentiating systolic phase is
more challenging, because of the more similar appearance of
various small detected contour types. At systole, these small
independent contours can be easily mistaken as mitral valve,
and thus, the false-negative diagnosis of systolic phase is
made.
IV. CONCLUSION
A new possible approach in the field of heart disease
remote monitoring could offer patients a more individually
focused care and, thus, an improved quality of life. The main
goal of this system was to develop a method capable of realtime estimate the cardiac cycle in LV Echocardiographic
image sequences. In a first step, the developed system used
the denoising, the Binarization, and the segmentation
techniques. Then, an original method dealing with new
proposed image feature sets for an analysis task was
designed. In the second step, the SVM technique was
employed followed by a CADi efficiency study. In order to
obtain a computationally fast, efficient and processing time
for estimation of cardiac cycle phase recognition this method
is use full.
ACKNOWLEDGMENT
The authors would like to thank anonymous
reviewers for their insightful comments and valuable
suggestions.
http://www.ijettjournal.org
Page 84
International Journal of Engineering Trends and Technology (IJETT) – Volume 13 Number 2 – Jul 2014
REFERENCE
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
[13]
[14]
W. B. Kannel, “Incidence and epidemiology of heart failure,”
Heart Fail Rev., vol. 5, pp. 167–173, 2000.
S. Stewart, “Prognosis of patients with heart failure compared
with common types of cancer,” Heart Fail. Monit. vol. 3, pp. 87–
94, 2003.
S. A. Aase, S. R. Snare, O. C. Mjlstad, H. Dalen, F. Orderud, and
H. Torp, “QRS detection and cardiac cycle separation without
ECG,” in Proc. IEEE Int. Conf. Ultrason. Symp. 2009, pp. 1399–
1402.
W. H. Gaasch and R. M. Zile, “Left ventricular diastolic
dysfunction and diastolic heart failure,” Annu. Rev. Med., vol. 55,
pp. 373–394, 2004.
G. Ramachandran, M. Singh, and K. Nityanandan, “Left
ventricle wall motion analysis during various phases of cardiac
cycle from 2Dechocardiographic images,” in Proc. IEEE Eng.
Med. Biol. Soc.,Oct./Nov. 1991, vol. 13, pp. 235–236.
P. Negrini, P. Tomassini, G. Cella, M. Magrin, M. Ercolani, A.
Mazzarisi, V. Gemignani, A. Ciampa, P. Marcheschi, and P.
Marraccini, “Automatic border detection through a cardiac cycle
to analyze left ventricular function,” in Proc. Comput. Cardiol.
Conf., 2002, pp. 181–183.
S. Martin, V. Daanen, J. Troccaz, and O. Chavanon, “Tracking of
the mitral valve leaflet in echocardiography images,” in Proc.
IEEE Int. Symp. Biomed. Imaging, 2006, pp. 181–184.
D. Bibicu, S. Moldovanu, and L Moraru, “Denoising the
Echocardiographic images using Fourier transform,” Ann.
“Dunarea de Jos” Univ. Galati, Math, Phy, Theoretical Mech.,
Fascicle II, year III (XXXIV), pp. 73–80, 2011.
W. Hai-Yang, P. De-Lu, and X. De-Shen, “A fast algorithm for
two dimensional Otsu adaptive threshold algorithm,” Acta
Automat. Sinica, vol. 33, pp. 968–971, 2007.
G. Dougherty, Digital Image Processing for Medical
Applications. Cambridge, U.K.: Cambridge Univ. Press, pp. 184–
158, 2009.
V.Wan andW. M. Campbell, “Support vector machines for
speaker verification and identification,” in Proc. IEEE Workshop
Neural Networks for Signal Processing, Sydney, Australia, Dec.
2000, pp. 775–784.
E. Osuna, R. Freund, and F. Girosi, “Training support vector
machines: Application to face detection,” in Proc. Computer
Vision and Pattern Recognition, Puerto Rico, 1997, pp. 130–136.
T. Joachims, “Transductive inference for text classification using
support vector machines,” presented at the Int. Conf. Machine
Learning, Slovenia, and June 1999
C. J. Burges, “A tutorial on support vector machines for pattern
recognition,” Knowledge Discovery and Data Mining, vol. 2, pp.
121–167, June 1998.
ISSN: 2231-5381
.
http://www.ijettjournal.org
Page 85