Document 12925447

International Journal of Engineering Trends and Technology (IJETT) - Volume4 Issue8- August 2013
Predictive Modelling & Analysis of AISI 1045 Tool Steel in Die Sinking E.D.M. using
Neural Network Approach
Samaddar Prasenjeet
1
, B. B. Patel
2
, K. B. Rathod
3
1
P.G.student ,Mechanical Engineering Department,S.P.C.E.Visnagar, Gujarat,India
2
Assistant Professor ,Mechanical Engineering Department,S.P.C.E.Visnagar, Gujarat,India
3
Assistant Professor ,Mechanical Engineering Department,Faculty of research, Bardoli, Gujarat,India
Abstract — Electrical Discharge Machining (EDM) is a non conventional machining process, where electrically conductive materials are machined by using a precisely controlled spark that occurs between an electrode and a work piece in the presence of a dielectric fluid. It has been a demanding research area to model and optimize the EDM process in the present scenario.
In this work a neural network model is presented for predictions of material removal rate (MRR) & tool wear rate (TWR) in die sinking electrical discharge machining (EDM) process for American Iron and Steel
Institute 1045 tool steel with copper electrode.
Experimentation has been carried out on EDM of AISI 1045 tool Steel. The experimental results have been used to train
ANN using Back-Propagation Algorithm which gives the optimum value of the performance parameters like Material
Removal Rate (MRR) and Tool Wear Rate (TWR) based on the influence of various electrode materials and processing parameters such as Gap Voltage, Peak Current, Pulse on time and Pulse off time.
According to the correlation coefficients diagram it was concluded that the ANN tool gives us the best possible predictions for the data we have trained.Also we are getting ANN MRR results very much closer to our experimental MRR values.This shows the values that are very much possible to correlate amongst one another apart from taking experiments and finally the values of experimental
TWR and predicted TWR are nearly correlating with one another.This shows that the ANN can be trained enough to give us close results by predicting the values.
Keywords— Artificial Neural Network (ANN), Back
Propagation, Electro Discharge Machining, Material Removal
Rate, Tool Wear Ratio.
INTRODUCTION
The unconventional methods of machining have several specific advantages over conventional methods of machining. And these promise formidable tasks to be undertaken and set a new record in the manufacturing technology. These methods are not limited by hardness, toughness, and brittleness of the material but can produce any intricate shape on any work piece material by a suitable control over various physical parameter of the process. There has been a rapid growth in the development of harder and difficult to machine metals and alloys during the last two decades. Conventional edged tool machining is uneconomical for such materials and the degree of accuracy and surface finish attainable is poor. In view of seriousness of this problem, it was emphasized the need for the development of newer concepts in metal machining. The newer machining that developed is often called ‘modern machining processes or ‘nontraditional machining processes. The word unconventional is used in sense that the metal like tungsten, hardened stainless steel tantalum, some high strength steel alloys etc. are such that they can’t be machined by conventional method but require some special technique . The conventional methods in spite of recent advancements are inadequate to machine such materials from stand point of economic production. In unconventional machining methods, there is no direct contact between the tool and work piece; hence the tool need not to be harder than work piece. Further, in spite of the recent technical advancement, the conventional machining processes are inadequate to produce complex geometries shapes in hard and temperature resistant alloy and die steels. Keeping these requirements into mind, a number of non-conventional methods have been developed
[1]
.
LITERATURE REVIEW
The history of EDM Machining Techniques goes as far back as the
1770s when it was discovered by an English Scientist. However,
Electrical Discharge Machining was not fully taken advantage of until 1943 when Russian scientists learned how the erosive effects of the technique could be controlled and used for machining purposes.
When it was originally observed by Joseph Priestly in 1770, EDM
Machining was very imprecise and riddled with failures.
Commercially developed in the mid 1970s, wire EDM began to be a viable technique that helped shape the metal working industry we see today. In the mid 1980s.The EDM techniques were transferred to a machine tool. This migration made EDM more widely available and appealing over traditional machining processes
[2]
.
Electrical discharge machining (EDM) is a non-traditional machining method commonly used to produce die cavities with the erosive effect of electrical discharges. It uses thermoelectric energy sources for machining low machinability materials, a complicated intrinsicextrinsic shaped job regardless of hardness has been its distinguishing characteristics. EDM founds its wide applicability in manufacturing of plastic moulds, forging dies, press tools, die castings, automotive, aerospace and surgical components. In EDM, a power supply delivers high characteristics. EDM has its wide applications in manufacturing of plastic moulds, forging dies, press tools, die castings, automotive, aerospace and surgical components.
No direct contact is made by EDM between the electrode and the work piece. It annihilates mechanical stresses, chatter and vibration problems during machining. Various types of EDM process are available, but here it is Die-Sinking type EDM machine which requires the electrode to be machined in the exact contradictory shape as the one in the work piece.It highlights the development of a comprehensive mathematical model for correlating the interactive and higher order influences of various electrical discharge machining parameters through response surface methodology (RSM), utilizing relevant experimental data as obtained through experimentation. The
ISSN: 2231-5381 http://www.ijettjournal.org
Page 1
International Journal of Engineering Trends and Technology (IJETT) - Volume4 Issue8- August 2013 research findings of the present study based on RSM models can be used effectively in machining of AISI 1045 steel in order to obtain best possible EDM efficiency
[3]
.
Electro Discharge Machining (EDM) has become one of the most important methods for manufacturing micrometer parts having ability to manufacture complicated shapes with high accuracy and to machine any electrically conductive materials regardless of hardness. It has been known that the material removal mechanism in EDM is due to plasma formation, heat transfer, superheating of electrodes and ejection of material due to electrical discharge energy transfer of the order of less than 100 J.
The power supply used in EDM is either relaxation type pulse generator or transistor type pulse generator with MHz pulsating frequency. Various gap monitoring and control strategies have been developed to avoid any problem of arcing and short circuiting
.
Moreover Flushing the debris from the machining gap is one of the major challenges in EDM process. Accumulation of debris in gap space causes inactive pulses such as short and open circuit. These types of discharges do not remove any material from workpiece and damage the surface integrity of machined specimen. By considering of these reasons, researchers focus on the methods which improve the flushing in EDM. Methods such as EDM with rotating tool electrode, ultrasonic vibration assisted EDM. Additive mixed EDM were introduced to develop the flushing of eroded particle in gap space and improve the machining performance
[4]
.
Fig-2 Workpiece after experimentation
Machining performance evaluations
Material Removal Rate
The metal removal rate is described as the volume of metal removed in unit time. It is proportional to the working current value. It is also defined as the volume of the metal removed per unit time per ampere which than yields a basis for the output comparison of different machines or different electrode materials.
E XPERIMENTAL S ETUP
A number of experiments were conducted to study the effects of various machining parameters on EDM process. These studies were undertaken to investigate the effects of various machining parameters on Tool wear ratio and Material removal rate. The selected workpiece material for the research work is AISI 1045 tool steel was selected due to its emergent range of applications in the field of mould industries. Experiments were conducted on JOEMARS AZ 50
JM-322 die sinking machine using positive polarity. The flushing pressure was 0.5 Kg/cm2. The copper with a diameter of 15 mm was used as a tool electrode and Die-electric fluid-92 (DEF-92) was used as die electric fluid.The workpiece before machining and after experimentation is shown in fig 1 & fig 2.Table:1 depicts the chemical composition of AISI 1045 tool steel.
Table: 1 Chemical composition of AISI 1045 tool steel
MRR
W tb
W
D t ta
Where,
W tb
= Weight before machining of w/p in gm,
W ta
= Weight after machining of w/p in gm,
D = Density of work piece material in gm/mm
3
, t = Time consumed for machining in minute.
Tool Wear Rate
The TWR is expressed as the volumetric loss of tool per unit time.
TWR
W tb
W
D t ta
Where,
W tb
= Weight before machining of tool in gm,
Chemical composition of AISI 1045 steel
W ta
= Weight after machining of tool in gm,
D = Density of tool material in gm/mm
3
,
Composition
(%)
C Si
0.45 0.25
Mn
0.75
Cr
0.05
Mo
0.05 t = Time consumed for machining in minute.
Table:2 Different variables and their levels
Levels
Parameter
Current(A)
Pulse on time( µ s)
A
B
1
13
40
2
17
50
Pulse off time ( µ s) C 30 40
3
21
60
50
Fig-1 Workpiece before experimentation
SR.
No
1
2
3
4
5
Table-3 Readings as per full factorial
Current(amp)
13
Pulse on time( µ s)
40
Pulse off time( µ s)
30
MRR
(mm
3
/min)
12.6426
13
13
13
13
40
40
50
50
40
50
30
40
9.2649
6.1698
14.3777
12.0887
TWR
(mm
3
/min)
0.0775
0.4539
0.2483
0.0135
0.0873
ISSN: 2231-5381 http://www.ijettjournal.org
Page 3384
International Journal of Engineering Trends and Technology (IJETT) - Volume4 Issue8- August 2013
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
13
13
13
13
17
17
17
17
17
17
17
17
17
21
21
21
21
21
21
21
21
21
50
60
60
60
40
40
40
50
50
50
60
60
60
40
40
40
50
50
50
60
60
60
50
30
40
50
30
40
50
30
40
50
30
40
50
30
40
50
30
40
50
30
40
50
9.3270
14.2725
12.4651
11.4056
17.9037
13.3942
8.9341
21.2662
17.2902
13.8162
23.9430
21.8327
17.6476
22.9797
16.2560
11.3853
28.9189
24.1191
18.0304
32.9670
27.7655
23.6641
0.3292
0.0888
0.4146
0.0090
0.4034
0.3247
0.6011
0.2101
0.1326
0.0449
0.0888
0.0528
0.0573
0.6236
0.7899
0.6258
0.5337
0.2292
0.2562
0.1921
0.0090
0.1494
The table-2 shows the different variables and their levels used in
EDM machine.The variables used here are current, pulse on time and current pulse off time.
Table-3 shows the experimental analysis where input parameters are current, pulse on time and current pulse off time whereas the output parameters are MRR & TWR.
A
RTIFICIAL
N
EURAL
N
ETWORK AND
B
ACK
P
ROPAGATION
Studies on neural networks have been forced to follow the way that the brain operates. A network is basically described in the terms of individual neurons, network connectivity, weights associated with various links between the neurons and the activation function for each neuron. The network maps an input vector from one space to another. The mapping is not specified, but is trained. The network is represented with a specified set of inputs and their respective outputs.
The learning process is used to set up proper interconnection weights and the network is trained to make suitable associations between the inputs and their following outputs. Once trained, the network provides rapid mapping of a given input into the preferred output quantities. This, in turn, can be used to modify the efficiency of the design process. Artificial neural systems are that physical cellular systems which acquire, store and utilize experimental information.
Powerful learning algorithm and self-organizing rule allow ANN to self adapt as per the requirements in continually varying environment
(adaptability property). The ANN architecture is a multilayer, feed forward backpropogation architecture. Multilayer perception (MLP) has an input layer, output layer and hidden layer. Input vector is incident on input layer and then to hidden layer and subsequently to final layer/output layer via. weighted connections. Each neuron operates by taking the sum of its weighted inputs and passing the results through a non-linear activation function (transfer function).
Generally sigmoid function is chosen as the non-linear activation function
[5]
.
Fig-3 Input-Output Symmetry
Back propagation is an overview of the Widrow-Hoff ‟s learning law to multiple-layer networks and nonlinear differentiable transfer functions. Here the Input vectors and their corresponding target vectors are used to train a network until it is able to fairly precise a function, associate input vectors with some specific output vectors, or classify input vectors according to an appropriate route defined by the operator. Networks with biases, a sigmoid layer and a linear output layer are capable of representing any function with a fixed amount of discontinuities. Standard back propagation is a gradient descent algorithm, same as that of the Widrow-Hoff„s learning rule, in which the network weights are forced along the negative of the side of the performance function. The term back propagation represents the way in which gradient is computed for nonlinear multilayer networks. There are various numbers of variations on the fundamental algorithms that are based on different standard optimization techniques, like conjugate gradient and Newton method.
Suitably trained back propagation networks are likely to give reasonable answers, when given with inputs that they had never encountered
[6]
. A new input leads to an output which is analogous to the correct output for respective input vectors used in training that are similar to the new inputs being given. This overview makes it feasible to train a network on a resembling set of input/target pairs and achieve good results without training the network on all the possible input/output pairs. The most familiar process parameters that are varied to obtain an efficient ANN model are ANN architectures, learning/training algorithms and number of hidden neurons. These parameters have been chosen here as process parameters to a random. The performance parameters for evaluating the ANN model are taken as Mean squared error (MSE), training
Correlation coefficient (R), testing R and validating R which are the default performances assessing parameters assumed by MATLAB
7.1.
A single neuron is generally not enough to solve real life problems
(any linear or nonlinear) efficiently, and networks with more number of neurons arranged in particular sequences are frequently required.
These particular sequences of arrangement of neurons are created as neural architecture. The sequences of arrangements of neurons determine how computations will proceed and also responsible for the effectiveness of the model. Once the network weights and biases are initialized, the network is ready for its training. We can train the network for function estimation (nonlinear regression), its pattern association and classification. During a training process we need a set of examples of proper network behavior for network inputs p and target outputs t . Also the weights and biases of the network are iteratively familiarized to reduce the network ‟s performance function net.performFcn
. Mean square error, mse is the principle performance function for the feed forward networks which is also defined as the average square error between the outputs a and the target outputs t of the network. All such algorithms employ a slope of the performance function to decide how to adjust the weights so as to minimize the performance. The gradient is hence calculated by using a technique called back propagation that involves performing backward computations for the network. The back propagation computation is generally derived from the chain rules of calculus
[7]
.
Mean Square Error
The error function that has been used here for supervised training is the mean squared error function (Eavg) . Mathematically it can be expressed as:
ISSN: 2231-5381 http://www.ijettjournal.org
Page 3385
0
0
0
0
1
0
0
0
-1
-1
-1
0
0
-1
-1
-1
1
1
1
1
1
1
1
1
12
13
14
15
16
17
18
19
7
8
9
10
11
4
5
6
20
21
22
23
24
25
26
27
International Journal of Engineering Trends and Technology (IJETT) - Volume4 Issue8- August 2013
1
N
n 1
K k 1
( d nk
a nk
)
2
MSE
2 K N
Where d nk the desired output for exemplar n at neuron k of output layer and a nk is the network output for exemplar n at neuron k of output layer.
K is the number of neuron in the output layer and N is the number of exemplars in the data. Mean squared error (MSE) is two times of the average mean squared error function ( Eavg ). The factor ½ is multiplied here with the mean squared error function to make the differentiation of this function easier. Lower value of MSE is preferable for a superior ANN model.
Table-4 Normalized Data
Sr No
1
2
Current
-1
-1
Pulse on time
-1
-1
Pulse off time
-1
0
MRR
-0.5169
-0.7690
TWR
-0.8246
0.1395
2
3
4
5
6
7
8
Numbers of hidden neuron
Numbers of output neuron
Total numbers of exemplar
Proportion of training, validation and testing data
Data normalization
Weight initialization
Transfer function
4
2
27
70:15:15
-1 to 1
-------
--------
-------------
-------------
-------------
-------------
Mapminmax data normalization technique
Random weight initialization technique
Tansig and
Purelin (for both hidden and output layer)
3 -1 -1 1 -1.0000 -0.3871
0
1
1
1
-1
-1
0
0
1
1
1
-1
-1
0
0
0
0
0
1
1
1
-1
-1
0
-0.3874
-0.5582
-0.7644
-0.3953
-0.5302
-0.6092
-0.1242
-0.4608
-0.7937
0.1267
-0.1700
-0.4293
0.3265
0.1690
-0.1434
0.2546
-0.2472
-0.6107
0.6979
0.3396
-0.1148
1.0000
0.6118
0.3057
1
-1
0
1
-1
1
-1
0
-1
0
1
-1
0
-1
0
1
0
1
-1
0
1
0
1
-1
D ATA N ORMALIZATION
-0.9885
-0.7995
-0.1799
-0.7956
0.0388
-1.0000
0.0101
-0.1914
0.5165
-0.4850
-0.6834
-0.9081
-0.7956
-0.8878
-0.8763
0.5741
1.0000
0.5797
0.3438
-0.4360
-0.3669
-0.5311
-1.0000
-0.6404
Generally the inputs and targets that dealt with an ANN model are of various ranges.These input and targets are needed to be scaled in the same order of magnitude otherwise some variables may appear to have more impact than they actually do, which will lead to form error in the model. Here the data of neural network model is scaled in the range of -1 to 1. The mapminmax data normalization technique has been used for this purpose using the following equation:
X
R
2
R max
R min
R min
1
9
10
11
Error function
Type of Learning rule
Stopping criteria
--------
---------
---------
R ESULTS AND D ISCUSSION
Mean squared error function
Supervised learning rule
Early stopping
Table 5 shows the specifications that are important for ANN modelling.The various parameters used consist of input neuron which are three.However the hidden neurons can be varied.This is the portion which remains hidden from outside world.The number of output neurons are MRR & TWR.Total number of exempler are
27 which are determined using full factorial method.The proportion for training the neural network is kept 70%.It is the most important part in ANN modelling.How good the network is trained is based upon the percentage for training the ANN model.15% data is used for validation purpose whereas remaining
15% is used for testing the data.The range for data normalization is kept between -1 to 1 which we have discussed earlier.Here the weight initialization technique is random so that data can be accessed to nearer value.the transfer function is Tansig & Purelin for both hidden and output layers.Supervised learning rule is used along with mean square error function.The stopping criteria is early stopping because once the ANN gets the best possible fit for the network model it should stop and display the result.
Table-5 Important Specification for ANN Modelling
Sr.
No.
Parameter Data / Data range
Technique used
1 Numbers of input neuron
3 -------------
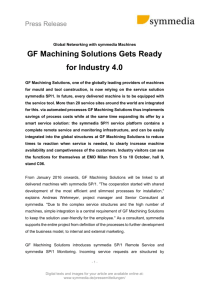
Fig-4 Correlation coefficient for MRR
ISSN: 2231-5381 http://www.ijettjournal.org
Page 3386
International Journal of Engineering Trends and Technology (IJETT) - Volume4 Issue8- August 2013
Correlation coefficient can be used to determine how well the network output fits the desired output. The correlation coefficient between a network output ( a ) and a desired output ( d) can be mathematically defined as: responses by ANN model.The configuration lies within how good the network is trained.
G
RAPHICAL
R
EPRESENTATION OF
MRR & TWR
N
n 1
( a n
a ) ( d n
d )
R
N
N
n 1
( d n
d ) 2
N
n 1
( a n
a ) 2
N N
Where n = exemplar or run number, a n and d n are the network output and desire output respectively at a particular exemplar, a and d are the data mean of network output and desired output respectively.
Higher value of R is desirable for an effective ANN model.
Fig-4 shows the Regression plot where the circle indicates the data for training and testing for MRR. The red, green and blue indicate the best possible fit. The training is found unique at R=1 and validation at R=0.8. During the testing result value of R is found to be 0.97565 which is most suitable.The graphs are used to determine the best possible fit which the ANN can generate. The fig. 5 shows another correlation coefficient that is generated by varying the number of neurons for TWR.
Fig-6 Experimental vs. predicted MRR of training data
In fig-6 the graph shows the variation of experimental MRR and
ANN MRR of training data which are closely related to one another. In fig-7 the graph shows the variation of experimental
MRR and ANN MRR of testing data which are closely related to one another. Initially the exp data is at higher value but ANN approaches itself to much closer range with experimental data. The nearer is the predicted data with respect to the experiment data then the better is the network trained. The performance characteristics can be viewed and can be modelled with the help of ANN to show the various responses.
Fig-7 Experimental vs. predicted MRR of testing data
Fig-5 Correlation coefficient for TWR
In this correlation coefficients another regression analysis is carried out by varying the parameters and it is found that value of R=1 for training and during validation R is equal to 0.9.When the value is closer to 1 it indicates the best possible fit.this shows that data can be varied and experiments can be carried out in a number of ways by ANN to generate the best possible output. However the number of neurons can be varied simultaneously in order to check the
Fig-8 Experimental vs. predicted TWR of training data
ISSN: 2231-5381 http://www.ijettjournal.org
Page 3387
International Journal of Engineering Trends and Technology (IJETT) - Volume4 Issue8- August 2013
[2] Hwa-Teng Lee, Fu-Chuan Hsu, Tzu-Yao Tai, Study of surface
Fig-9 Experimental vs predicted TWR of testing data
In fig 8 the graph shows the variation of experimental TWR and
ANN TWR of training data which are closely related to one another. The curves are closely linked with each other.
In fig 9 the graph shows the variation of experimental TWR and
ANN TWR of testing data which are closely related to one another.
Initially the exp data is at higher value but ANN approaches itself to much closer range with exp data. integrity using the small area EDM process with a copper– tungsten electrode, Materials Science and Engineering A364
(2004) 346–356.
[3] B. B. Patel et. al., Application of Response Surface Methodology for Determining MRR and TWR Model In Die Sinking EDM of
AISI 1045 Steel, International Journal of Engineering pp.1227-
1231.
[4] Rajesh Kumar Porwal and Vinod Yadava, ANN modelling for the prediction of Material Removal Rate and machined hole overcut in hole drilling electro discharge micro machining.(RESEARCH
PAPER).
[5] Reza Teimouri & Hamid Baseri, Effects of magnetic field and rotary tool on EDM performance, Journal of Manufacturing
Processes.
[6] Debabrata Mandal, Surjya K. Pal , Partha Saha, Modeling of electrical discharge machining process using back propagation neural network and multi-objective optimization using nondominating sorting genetic algorithm-II, Journal of Materials
Processing Technology (2007), 186,154–162.
[7] M.K.Pradhan,,C.K.Biswas.Prediction on surface roughness in
EDM of D2 steel using Regression and Artificial neural network
Modelling,Journal of machining and forming
C
ONCLUSION technologies(JoMFT),Nova science Publishers,vol-2,Issue1-2,25-
46(2009).
[8] M.K.Pradhan & C.K.Biswas, Neuro-fuzzy model and Regression model a comparison study of MRR in Electrical discharge machining of D2 tool steel, World Academy of Science,
Engineering and Technology 57 2009.
In this research work, by concluding the results and the training data used here is for fitting the model and thereafter testing data is used for evaluating the model. However plotting of the testing data was considered for evaluation of best ANN model. Levenberg-Marquardt training algorithm are seen to be most efficient for optimal values of responses of AISI 1045 tool steel, hence most proficient ANN modeling was selected. It has been found that among several neural configurations a feed-forward backpropagation ANN, having single hidden layer with can provide the best prediction.
1) According to fig-4 & fig-5 the correlation coefficients have been carried out and it was concluded that the ANN tool gives us the best possible predictions for the data we have trained.
2) According to fig-6 & fig-7 we are getting ANN MRR results very much closer to our experimental MRR values.This shows the values that are very much possible to correlate amongst one another apart from taking experiments.
3) According to fig-8 & fig-9 again the values of experimental
TWR and predicted TWR are nearly correlating with one another.This shows that the ANN can be trained enough to give us close results by predicting the values.
4) Artificial Neural Network is a flexible tool for process parameters optimization. It is an effective tool to get the contribution of each parameter and to determine significant parameters which affect the performance characteristics.
5) ANN technique incorporates the relation between EDM process input parameters and the obtained MRR & TWR ratio absolutely.
The ANN-based process model can be used to select optimum process conditions to improve EDM process productivity and finishing capability.
R EFERENCES
[1] C.H.Che Heron et al., Investigation on the influence of machining parameters when machining tool steel using EDM, Journal of
Materials Processing Technology 116(2001) 84-87.
ISSN: 2231-5381 http://www.ijettjournal.org
Page 3388