The Introduction and Evaluation of a Prototype GOES-R Fog/Low Stratus
advertisement

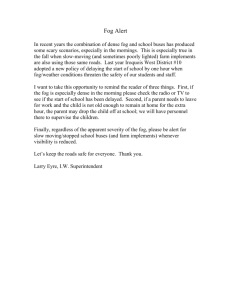
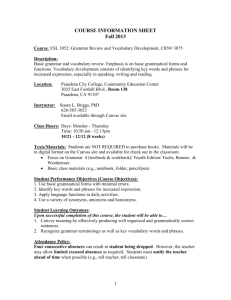
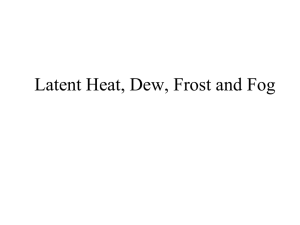
The Introduction and Evaluation of a Prototype GOES-R Fog/Low Stratus Thickness Algorithm Using SEVIRI, GOES and SODAR Data Corey G Calvert, Michael J Pavolonis* QuickTime™ and a TIFF (Uncompressed) decompressor are needed to see this picture. Cooperative Institute for Meteorological Satellite Studies, Madison, Wisconsin *NOAA/NESDIS/Center for Satellite Applications and Research Advanced Satellite Product Branch, Madison Wisconsin Introduction Previous Fog Thickness Algorithm • Ellrod (1995) developed a regression-based fog thickness algorithm for GOES dependent on the 11-3.9 micron brightness temperature differences (BTDs). • A linear relationship between the fog depth from PIREPs and BTDs was found when the BTDs were between 26 K. • The figure to the right shows the linear relationship using counts, where 2 counts equal 1 K. Current GOES-R Fog Thickness Approach The previous operational fog/low cloud thickness algorithm for GOES relied on differences between the 3.9 and 11-micron brightness temperatures. While this is a reliable approach during the night, solar contamination of the 3.9-micron channel makes this unreliable during the day, unless the solar component is accounted for. Here we present an algorithm that uses the physical properties of clouds and an atmospherically-corrected 3.9 micron emissivity to calculate the thickness of fog and low stratus developed for the Advanced Baseline Imager (ABI) that will fly on GOES-R. This work uses an analysis software package called GEOCAT to evaluate and characterize the performance of the prototype ABI fog thickness algorithm applied to SEVIRI using GOES data and surface SODAR measurements. • Use the liquid water path (LWP) produced by the GOES-R AWG cloud application team (for solar zenith angles < 70º) and an assumed liquid water content (LWC) to calculate the geometrical thickness (ΔZ) of the fog layer. • The LWC is assumed to be 0.06 g m3 (Hett et al., 1998) • The correlation between the SODAR measured thicknesses and the GOES-R fog thicknesses yielded a correlation coefficient of 0.82 with errors under 50 m in the bay area. Figure from Ellrod (1995). ¾ No daytime fog thickness algorithm • The figures below show an example of Ellrod’s experimental fog depth algorithm applied to a GOES-12 scene (right), with the corresponding 3.9 micron emissivity image (left). The dark areas in the 3.9 micron emissivity are areas of fog/low stratus. Image below obtained from http://www.star.nesdis.noaa.gov/smcd/opdb/aviation/fog.html Table 1 below contains the visual flight rules pilots must abide by. For this study, fog/low stratus will be defined as clouds with bases below ~900 m as this is when restrictions are applied to pilots. Locations of these clouds are determined by a separate fog mask currently under development. Table 1: Aviation based fog/low cloud definition Ceiling > 3000 ft (914 m) 1000 ft (305 m) - 3000 ft (914 m) 500 ft (152 m) - 1000 ft (305 m) < 500 ft (152 m) Visual Flight Rules Marginal Visual Flight Rules Instrument Flight Rules Low Instrument Flight Rules SODAR Data emsac(3.9μm) = Rsfc(3.9μm) B[3.9μm,BTsfc (11μm)] • The acoustic SODAR (SOnic where Detection And Ranging) is an upwardly pointing parabolic antenna that emits an audible signal whose return signal is proportional to the vertical gradient of air density. R( λ) − Ratm( λ ) Rsfc (λ ) = Tatm ( λ) λ: wavelength R(λ): observed radiance Ratm(λ): atmospheric radiance Tatm(λ): total atmospheric transmittance Rsfc(λ): surface radiance εsfc(λ): surface emissivity • The SODAR is capable of detecting the base of the boundary layer inversion, which defines the top of the stratus deck. BTsfc ( λ ) = B ( λ,Rsfc( λ)) −1 Rsfc(3.9μm): 3.9-μm surface radiance California Italy Nighttime: Visibility > 5 nm 3 nm - 5 nm 1 nm - 3 nm < 1 nm Atmospherically-Corrected 3.9 micron Emissivity emsac(3.9μm) is computed as follows: • A combination of ceilometer and SODAR measurements are used to infer the geometric boundaries of low clouds in the San Francisco Bay Area. ΔZ = LWP /LWC Daytime: • Use a regression analysis based on the relationship between the atmosphericallycorrected 3.9 micron emissivity and SODAR thickness measurements. ΔZ = A[emsac (3.9μm)] + B • In the above equation, A = -1159.9 and B = 1295.7, are constants determined by a linear regression fit to a scatter plot of emsac(3.9μm) and SODAR measured fog thickness in the San Francisco Bay area. • The GOES-R fog thicknesses calculated using this method yield a correlation coefficient of -0.85 with errors under 50 m in the bay area. • While a relationship was seen with the emsac(3.9μm), the correlation between the 3.9-11 micron BTDs and the SODAR thicknesses in the bay area was found to be low. Please note that this data was limited to a small area and may not be representative of the overall performance of either the emsac(3.9μm) or 3.9-11 micron BTD approach. B-1( ): inverse Planck Function B[3.9μm,BTsfc(11μm)]: the 3.9-μm blackbody surface radiance California relative to the 11-μm surface brightness temperature France Why use atmospherically-corrected 3.9 micron emissivity over 3.9-11 micron brightness temperature differences? • Removes dependence on the 11 micron channel fog depth • Accounts for atmospheric water vapor References Bendix, J., B. Thies, J. Cermak, and T. Nauss, 2005: Ground Fog Detection from Space Based on MODIS Daytime Data - A Feasibility Study. Weather and Forecasting. 20, 989-1005. • This network of instruments is operated by the FAA and NWS. I would like to thank the NWS San Francisco Bay Area Forecast Office for providing the SODAR data. (Clark et al., 1997) • Accounts for viewing zenith angle differences Clark, D.A, and F.W. Wilson, 1997: “The San Francisco Marine Stratus Initiative”, 7^th Conference on Aviation, Range and Aerospace Meteorology, Long Beach, CA, pp. 384-389. Ellrod, G.P., 2002: Estimation of Low Cloud Base Heights at Night from Satellite Infrared and Surface Temperature Data. National Weather Digest., 26, 39-44. The fog mask currently being developed for GOES-R relies heavily on the emsac(3.9μm), which results in cleaner detection of fog/low stratus Ellrod, G.P., 1995: Advances in the Detection and Analysis of Fog at Night Using GOES Multispectral Infrared Imagery. Weather and Forecasting., 10, 606-619. Hess, M., P. Koepke and I. Schult, 1998: Optical Properties of Aerosols and Clouds. Bull. Amer. Meteor. Soc., 79, 831-844. Contact the author at corey.calvert@ssec.wisc.edu