New Generation of Digital Microfluidic Devices Please share
advertisement

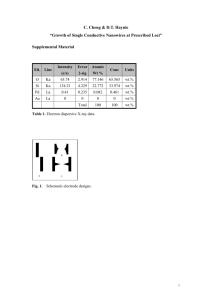
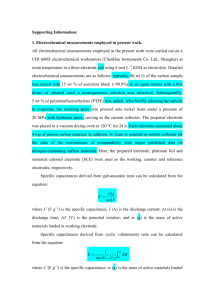
New Generation of Digital Microfluidic Devices The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation Kedzierski, J., S. Berry, and B. Abedian. “New Generation of Digital Microfluidic Devices.” Microelectromechanical Systems, Journal of 18.4 (2009): 845-851. ©2009 Institute of Electrical and Electronics Engineers. As Published http://dx.doi.org/10.1109/jmems.2009.2023845 Publisher Institute of Electrical and Electronics Engineers Version Final published version Accessed Thu May 26 08:46:24 EDT 2016 Citable Link http://hdl.handle.net/1721.1/59438 Terms of Use Article is made available in accordance with the publisher's policy and may be subject to US copyright law. Please refer to the publisher's site for terms of use. Detailed Terms JOURNAL OF MICROELECTROMECHANICAL SYSTEMS, VOL. 18, NO. 4, AUGUST 2009 845 New Generation of Digital Microfluidic Devices Jakub Kedzierski, Shaun Berry, and Behrouz Abedian Abstract—This paper reports on the design, fabrication, and performance of micro-sized fluidic devices that use electrowetting to control and transport liquids. Using standard microfabrication techniques, new pumping systems are developed with significantly more capability than open digital microfluidic systems that are often associated with electrowetting. This paper demonstrates that, by integrating closed microchannels with different channel heights and using electrowetting actuation, liquid interfaces can be controlled, and pressure work can be done, resulting in fluid pumping. The operation of two different on-chip pumps and devices that can form water drops is described. In addition, a theory is presented to explain the details of single-electrode actuation in a closed channel. [2008-0224] Index Terms—CYTOP, digital microfluidics, electrocapillary, electrowetting, microchannels, microfluidics, micropumps, surface tension. I. I NTRODUCTION V ARIOUS techniques have been reported to generate pressure and control fluids in microfluidic systems [1]. In some systems, pressure has to be supplied from an external macroscopic pressure source [2]. Systems that generate their own pressure “on chip” have been based on a number of effects, including electroosmosis [3], [4], electrophoresis [5], electromagnetism [6], acoustics [7], and thermocapillary effects [8], [9]. In addition, self-contained microelectromechanical system micropumps, which consist of moving solid boundaries, have been developed [10]. One important (and arguably the most versatile) technique that can be used to manipulate fluids on a microscale is electrowetting [11]–[15]. In electrowetting, the surface energy between a fluid and a dielectric-coated electrode can be controlled with an applied electric potential. Electrowetting is unique, because it is a direct way of controlling the surface tension of a fluid; thus, it is particularly useful for microfluidics where surface-tension effects are dominant. It is also unique in its simplicity of fabrication. In the most basic electrowetting system, only a single-electrode level needs to be patterned. There are numerous microfluidic applications for electrowetting, including variable focus lenses [16]–[19], electronic displays Manuscript received August 28, 2008; revised March 11, 2009. First published July 7, 2009; current version published July 31, 2009. This work was supported in part by the U.S. Air Force under Contract FA8721-05-C002. Opinions, interpretations, conclusions, and recommendations are those of the authors and not necessarily endorsed by the United States Government. Subject Editor C.-J. Kim. J. Kedzierski and S. Berry are with the Lincoln Laboratory, Massachusetts Institute of Technology, Lexington, MA 02420 USA (e-mail: jakub@ll.mit.edu; sberry@ll.mit.edu). B. Abedian is with the Department of Mechanical Engineering, Tufts University, Medford, MA 02155 USA (e-mail: behrouz.abedian@tufts.edu). Color versions of one or more of the figures in this paper are available online at http://ieeexplore.ieee.org. Digital Object Identifier 10.1109/JMEMS.2009.2023845 [20]–[22], and biotechnology systems [23], [24]. Electrowetting lends itself to manipulating discrete volumes of fluids; thus, microfluidics based on electrowetting is often referred to as digital microfluidics [24]–[27]. The majority of biotechnology applications that use digital microfluidics for the liquid transport mechanism do so by controlling discrete volumes, i.e., droplets [25]. Fluidic functions such as transporting, merging, splitting, and mixing of drops have been demonstrated [26]. Research in digital microfluidic-based biological applications includes polymerase for chain reaction for deoxyribonucleic acid analysis [27], assays [28], and protein analysis [29]. Digital microfluidics has typically been implemented with an open fluidic design, where water droplets are vertically confined by two parallel plates but are free to move in both horizontal directions. Drops are transported by the proper sequencing of a voltage potential on an array of patterned electrodes [26], [30]. This design is easy to fabricate but severely limits the types of functions that can be implemented. Closed-channel digital microfluidic structures, which permit active pumping, have only been explored by a few research groups [31], [32]. In this paper, we present a new type of electrowetting-based digital microfluidic device that uses closed microchannels to control and direct pressure. This new design allows for the implementation of basic fluidic components such as pistons and valves, which can further be integrated into a number of pump designs, droplet generators, and microfluidic transport systems. Starting with a theory of a single electrode that actuates in a microchannel, we present pumps for aqueous and nonaqueous fluids, as well as a digital microfluidic circuit that can generate/destroy droplets, and move them in an arbitrarily long channel using only a few electrodes. II. D ESIGN AND FABRICATION A. Design The microfluidic structure consisted of two wafers that were bonded together face to face, with the fluidic channels in between. The top wafer was 4 Pyrex and was allowed for optical observation of the fluids in the channels. The bottom wafer was 6 silicon, with fluidic ports drilled through the wafer to allow the introduction of fluids from the bottom. The electrode contacts were fabricated on the silicon wafer outside the 4 region where the top Pyrex wafer was bonded. The overall structure is shown in Fig. 1. B. Fabrication 1) Bottom-Wafer Process: The fabrication process for the 6 silicon bottom wafer is shown in Fig. 2(a). First, a 2-μm-thick layer of SiO2 is deposited by plasma-enhanced 1057-7157/$26.00 © 2009 IEEE 846 JOURNAL OF MICROELECTROMECHANICAL SYSTEMS, VOL. 18, NO. 4, AUGUST 2009 Fig. 1. Schematic of the completed bonded wafer pair with attached nanoports and tubes. Electrode potentials are controlled through a series of pads at the edge of the silicon wafer. chemical vapor deposition (PECVD). Next, a 300-nm Al layer is deposited and patterned to form the electrodes. A 2.7-μmthick layer of SiO2 is then deposited and polished by chemical–mechanical polishing (CMP) to 2 μm. After CMP, the contact pad openings are patterned and wet etched in HF. The microchannel layer is formed from an 11-μm-thick patterned SU-8 structural resist. A 10-s oxygen plasma is used to treat the SU-8 surface before the application of the amorphous fluoropolymer (aFP). The aFP film, i.e., 3% CYTOP in CYTOPSolv, is then spun on the wafer that covers the top of the SU-8, as well as the sidewalls and bottom of the channels. To prevent fluoropolymer streaking, the spin time is kept very short, i.e., only 2 s at 1000 r/min. After spinning, the wafer is baked at 90 ◦ C for 30 s, which evaporates the remaining solvent, resulting in a 200-nm fluoropolymer film. The CYTOP aFP layer is further hardened by vacuum baking at 150◦ C for 1 min. Finally, the fluidic ports are drilled through the wafer with a Gatan 601 ultrasonic drill. A thick resist layer is used to protect the CYTOP layer from damage and is removed in acetone after the drilling process is complete. 2) Top-Wafer Process: The fabrication process for the 4 Pyrex top wafer is shown in Fig. 2(b). The microchannel layer is formed from an 11-μm-thick patterned SU-8 structural resist. A transparent 100-nm-thick indium tin oxide (ITO) is then sputtered onto the wafer. Finally, the aFP, i.e., 2% CYTOP, is spun on the wafer and baked. The process is similar to the one used for the bottom wafer and produces an 80-nm-thick fluoropolymer film. 3) Bonding: Next, the microfluidic structure is formed by thermally bonding the CYTOP surfaces of the two wafers. Wafer-to-wafer alignment prior to bonding is achieved with a contact lithography tool. The bond is formed with pressure applied to the top Pyrex wafer at 150 ◦ C. Fig. 2(c) shows the cross section of the bonded wafer. Finally, Nanoports (Upchurch Scientific) are epoxied to the bottom of the silicon wafer and threaded with Teflon tubing. III. O PERATION OF A S INGLE E LECTRODE A. Fluidic Fill Initially, the entire microfluidic structure is filled with the dodecane oil. This instance spontaneously happens as soon as the oil is applied to one of the ports, because the oilfluoropolymer surface energy is much smaller than the airfluoropolymer surface energy. Once the structure is filled with oil, water is applied to the water port with a pressure Pb . Pb is defined as the difference between the water pressure at the water port and the oil pressure at the oil port. In our experiment, Pb was controlled using a manometer with a pressure range of 0 to 15 kPa. The surfaces of all the fluidic channels are coated with an aFP, i.e., CYTOP; thus, the microchannels are hydrophobic, and a certain minimum pressure is required to fill them with water. The microchannels are much wider (W ≥ 100 μm) than they are tall (height = 11 μm or 22 μm); thus, it is the height that determines the dominant radius of curvature of the oil–water interface in the channel. The minimum pressure that was required to displace oil with water in a microchannel of height h can be calculated using Young’s and Laplace equations [33] as ΔP = ∗ 2γw . h (1) Strictly defined, ΔP is the difference between the water pressure and oil pressure at the oil–water interface. In addition, ∗ γw = γwe − γoe , i.e., the difference between the water–aFP and oil–aFP surface energies, approximately 50 mJ/m2 . There are two types of channels in our microfluidic structure: 1) oil channels, with a height of ho = 11 μm, and 2) water channels, with a height of hw = 22 μm. The minimum water pressure that was required to displace oil with water into the water channels is Pmin , which is equal to about 4.5 kPa for a water–dodecane system. The oil channels are half the height of the water channels; thus, the water pressure that was required to displace oil in them is twice as high Pmax , i.e., about 9 kPa. Because of the capillary pressure difference between the two channel heights, as long as Pb is kept between Pmin and Pmax , water will displace oil from the water channels but not the oil channels. Pb of 5.5 kPa worked well to give a slow controllable water fill. At this pressure, the water slowly displaces dodecane from the water channels but stops as soon as it reaches an oil channel (see Fig. 3). B. Single-Electrode Actuation The cross section of a single-electrode device after fluidic fill and prior to actuation is shown in Fig. 3. The pressure across the water–oil interface without electrowetting is ΔP , as given by (1). ΔP depends on the microchannel height h and thus is dependent on the interface position. We have the following three cases. Case 1: Fig. 4(a): When the interface is in the water channel, ∗ /hw = Pmin . This condition typically ΔP = 2γw only occurs during fluidic fill. If Pb > Pmin , water will displace oil from the water channel. Case 2: Fig. 4(b): When the interface is in the oil chan∗ /ho = Pmax . This condition occurs nel, ΔP = 2γw when Pb > Pmax , which is typically avoided. It will also occur when water is driven into the oil channel through electrowetting actuation, and then, the voltage is removed. Case 3: Figs. 3 and 4(c): This case occurs when the interface is between the oil and the water channels and, typically, once the structure is filled. For this condition, the interface will adjust its curvature so that ΔP = Pb , as long as Pmin < Pb < Pmax and there is no voltage applied to the electrode. KEDZIERSKI et al.: NEW GENERATION OF DIGITAL MICROFLUIDIC DEVICES 847 Fig. 2. Cross-sectional schematics for the fabrication process of (a) the bottom wafer, (b) the top wafer, and (c) the final bonded pair. (a) A 6 silicon wafer is used for the bottom wafer. Fabrication proceeds as follows. A 2-μm oxide is deposited by PECVD, and 300-nm aluminum electrodes are deposited and patterned. Another oxide is deposited over the electrodes and CMPed to 2 μm over the electrodes (contact holes in the oxide are opened over the contact pads, which are external to the 4 center diameter, with a patterned HF etch). An 11-μm SU-8 layer is spun on and patterned, a 200-nm CYTOP aFP is spun on, and ports are drilled with a ultrasonic drill. (b) A 4 Pyrex wafer is used for the top wafer. Fabrication proceeds as follows. An 11-μm SU-8 layer is spun on and patterned, a 100-nm ITO layer is deposited by PECVD, and an 80-nm aFP layer is spun on and baked. (c) Wafers are aligned and bonded at 150 ◦ C. Fig. 3. Cross-sectional schematic of the filled single-electrode structure. The water-filled channels have a height of hw , whereas the oil-filled channels have a height of ho . When the water–oil interface is at the boundary of the two heights, as shown here and in Fig. 4(c), the effective capillary height h can change between ho and hw as the water–oil interface curvature changes. All these cases still ignore electrowetting; thus, they are only valid when the electrode is at 0 V or when it is not present. In electrowetting, the voltage that was applied to the bottom electrode V and its capacitances are important. The capacitances per area from the top ITO ground to the bottom electrode are C W in a water-filled channel and C O in the oil channel (see Fig. 3). We have −1 bottom ttop tOxide W aFP + taFP + (2) C = εr_ox ε0 εr_aFP ε0 −1 bottom ttop tOxide ho O aFP + taFP C = + + . (3) εr_ox ε0 εr_aFP ε0 εr_oil ε0 It is also convenient to define the difference between these two capacitances as C ∗ = C W − C O . Note that C W does not depend on the channel height, because the water phase is treated as a conductor. When the voltage is switched on, electrowetting must be included into ΔP through Lippman’s equation [33] in Case 2, where it is relevant for normal actuation. We have ΔP = Fig. 4. Cross-sectional schematics of the water–oil interface at three different positions. ΔP is the pressure difference across the interface. Note that, if ΔP = Pb , which is, in general, the case in (a) and (b), the interface moves. The pressure that drives the movement is Ps = Pb − ΔP . In (c), ΔP = Pb , as long as Pmin < Pb < Pmax . No voltage is applied to the electrodes in these cases. ∗ C ∗V 2 2γw − . ho 2ho (4) Here, C ∗ is used as the effective capacitance, because both the free energy associated with the oil capacitor and water capacitor must be considered. If ΔP = Pb , there is no interface or liquid motion, because the applied pressure is balanced by the pressure drop across the oil–water interface. If ΔP = Pb , then it is useful to define a working pressure Ps = Pb − ΔP . 848 JOURNAL OF MICROELECTROMECHANICAL SYSTEMS, VOL. 18, NO. 4, AUGUST 2009 Fig. 6. Electrode actuation data for various DC actuation voltages and back pressures Pb . The channel dimensions are W = 150 μm, ho = 11 μm, and L = 300 μm. The actuation in Fig. 5 corresponds to the 65-V point at 8 kPa. Fig. 5. Top–down photographs of a single-electrode (a) actuating and (b) relaxing. The actuation voltage is 65 V DC, and the back pressure Pb is 8.0 kPa. Ps is the pressure that causes the interface and liquids in the system to move. A voltage that is sufficiently large to generate a positive Ps will result in the movement of water into the oil channels. This actuation is shown in Fig. 5(a). Upon actuation, if the voltage is removed, ΔP increases, Ps changes sign, and now, a negative working pressure forces the interface back to its original position at the boundary between the water and the oil channels. This relaxation is shown in Fig. 5(b). The working pressure during actuation is, in general, not of the same magnitude as the working pressure during relaxation; thus, the two processes will generally occur at different speeds. To calculate a theoretical flow rate and, therefore, the speed with which actuation occurs, the fluidic resistance from the oil port to the water port must be considered. Fluidic resistance can be defined as R = Ps /Q, where Q is the flow rate during actuation (in liters per second). Using elementary hydrodynamics, each rectangular section of channel with length L, height h, width W , and viscosity μ can be considered as contributing a flow resistance of 2 RN = 12μL(h + W ) . (hW )3 (5) Fig. 7. Comparison of measured and theoretical ΔP values for different single-electrode actuation voltages. Theoretical ΔP values are obtained from (4), whereas measured values were obtained from Q = 0 intercepts in Fig. 6. To theoretically estimate the flow rate, first, R is calculated as the sum of all RN along the fluid path, and then the flow rate can be obtained as Q = Ps /R. For the electrode in Figs. 5–7, the calculated R is 1.3 kPa · s/nL. An actual flow rate can directly be obtained by measuring the actuation time with a CCD camera and considering the microchannel dimensions. A plot of flow rates that was measured this way for different actuation voltages and Pb values is shown in Fig. 6. Each voltage has a minimum Pb at which actuation occurs, where Q ∼ 0 L/s. Q increases with higher Pb and voltage, except for the relaxation return flow, which decreases with higher Pb and is independent of the voltage that was applied during actuation. The point where Q = 0 L/s occurs when Ps = 0 Pa and Pb = ΔP . Thus, it is possible to obtain a measurement of ΔP by looking at the intercept of the lines in Fig. 6 with the axis of zero flow. Fig. 7 shows the comparison of measured and theoretical [see (4)] values for ΔP . IV. M ICROFLUIDIC D EVICES A. Droplet Generator Multiple electrodes can be integrated into more complex microfluidic devices. For example, two electrodes can be used KEDZIERSKI et al.: NEW GENERATION OF DIGITAL MICROFLUIDIC DEVICES 849 Fig. 8. Top–down photographs of a droplet generator that creates a water droplet (1–4). A reverse process can be used to destroy the droplet (4–1). The oil phase consists of dodecane, the actuation voltage is 80 V DC, and the back pressure Pb is 7.5 kPa. Electrode–electrode spacing is 2 μm. Fig. 10. Top–down photographs of a three-electrode water pump pumping (1–4). The design consists of two water valves and a water piston. The top drawing shows top–down schematics and two cross sections along the dotted lines of the water valves and piston in different positions. Fig. 9. Top–down photographs of a three-electrode oil pump pumping (1–4). The design consists of two oil valves and an oil piston. The top drawing shows top–down schematics and two cross sections along the dotted lines of the oil valves and piston in different positions. to form a droplet generator. A droplet generator can be used to create or destroy water droplets in an oil channel, as shown in Fig. 8. The spacing between the two electrodes, i.e., 2 μm, is important in this application; in general, it should be smaller than or equal to the dielectric thickness between the fluid and the electrode. B. Oil and Water Pumps Perhaps, the most important microfluidic device is a pump. Figs. 9 and 10 show a three electrode implementation of an oil pump and a water pump, respectively. The two pumps are designed in a similar way, with two valve electrodes and one piston electrode. Considering the oil pump first, the oil valves on either side of the central oil piston electrode function by blocking the oil channel with water when a potential is applied to them. Thus, the oil valves are open when their electrode potential is off and are closed when it is on. The oil piston works by using a single-electrode actuation to displace the oil with water. The oil piston is extended when its electrode is on and is retracted when it is off. The water pump components function in a somewhat complementary manner, although there are important differences in the engineering of the heights of the appropriate channel regions. When the water valve electrode is switched on, water fills the valve area, and the water valve is open. When the electrode is switched off, water retracts from the valve area blocking water flow in the channel with oil and thus closing the valve. The water piston is also implemented with a single electrode, but unlike the oil piston, it is extended when the potential is switched off and is retracted when it is switched on. Theoretically, the pumps can generate a pressure that is somewhat smaller than (Pmax − Pmin ), and when tested at typical operating conditions, they generated a pressure of 2.0–2.5 kPa. C. Pressure Regulator In all the aforementioned devices, the water phase was pressurized at a positive Pb value through an external manometer. Clearly, it is advantageous to generate the required water pressure on chip and eliminate the need for an external pressure source during operation. This approach can be done with the use of a pressure regulator device, as shown in Fig. 11. The pressure regulator must be primed with water from the water port at Pb > Pmin . However, once primed, the regulated water reservoir in the bottom of Fig. 11 is self contained, and its pressure Pr is independent of Pb . Pr can electrically be regulated between Pmin , with Vr at 87 V, and Pmax , with Vr at 0 V. The relation for Pr is similar to the one used for ΔP , i.e., Pr = ∗ 2γw C ∗ Vr2 − . ho 2ho (6) Note that in theory, Pr can be reduced to below Pmin with a sufficiently high voltage. However, in reality, the electrowetting 850 JOURNAL OF MICROELECTROMECHANICAL SYSTEMS, VOL. 18, NO. 4, AUGUST 2009 Fig. 13. Top–down photograph of the vibration of the oil–water interface during AC actuation with impurities in the oil phase. Actuation potential is a square wave of −85 V to 85 V at 1 kHz. The Pb is 6.5 kPa. Fig. 11. Top–down photographs of the priming of a water pressure regulator (1–4). The Pb water terminal is attached to the water port, but after priming, the Pr water terminal is an independent self-contained water reservoir. The Pr pressure can electrically be controlled [see (6)] between Pmin and Pmax with the regulating electrode even after Pb is removed and the water port is sealed. One important consideration when designing an electrowetting system is the conductivity of the fluids. The water phase should be conducting, whereas the oil phase should be insulating. The limited conductivity of DI water is sufficient for the water phase. However, there is a stringent requirement on the resistance of the oil phase. Impurities that reduce the resistivity of the oil phase can short circuit the electrowetting effect, particularly in DC. For example, improper baking of SU-8 can leave sufficient solvent to make the oil very conductive. Oil conductivity can induce an interesting effect in AC actuation, where the oil–water interface will oscillate at the waveform frequency much like a vibrating string (see Fig 13). VI. C ONCLUSION Fig. 12. Top–down photographs of a microfluidic system with a droplet generator and a four-electrode push–pull oil pump. The system can be used to generate and pump water droplets in a closed channel. effect saturates [15] at approximately 90 V when γwe of the bottom electrode fluoropolymer is reduced to 0 mJ/m2 . Trying to operate above the saturation voltage will lead to permanent damage of the fluoropolymer. Using the pressure regulator, any system that requires a pressurized water source can be attached to a regulated reservoir. After fluidic fill and regulator priming, the external water manometer can be removed and the ports can be closed. The key contribution of this paper has been the integration of microchannels of various heights in an electrowetting system. The integration of microchannels allows for the selective filling of some regions with water and the implementation of critical microfluidic components such as valves and pistons. These basic components were further integrated into fluidic devices such as pumps that semicontinuously pump oil or water, droplet generators, and pressure regulators. Using basic components, complex systems can be assembled to perform a variety of functions such as transporting, forming, shaping, and combining droplets, regulating, and monitoring pressure. ACKNOWLEDGMENT D. Integrated Systems Fig. 12 shows an integrated fluidic system with a droplet generator and two pumps at the ends of a long microchannel. With the proper timing sequence water droplets can be created and then moved in the microchannel. Fig. 12 shows 9 droplets created and then moved to the right. In general a wide variety of digital microfluidic components can be integrated into a system to control fluid flow. V. T ECHNOLOGY C ONSIDERATIONS The speed of actuation is dependent on the fluidic resistance R. A typical actuation time of 300 ms can be reduced by decreasing the fluidic resistance. In this experiment, one 500-μm-long electrode that was designed to reduce R actuated in less than 50 ms, and further gains are possible with scaling. The relatively high actuation voltage, which is up to 90 V, is common for electrowetting systems. This voltage can be reduced by making the dielectric over the electrode thinner [14]. The authors would like to thank the Staff of the Microelectronics Laboratory for their help with fabrication and the Lincoln Laboratory Advanced Concepts Committee for their support. R EFERENCES [1] G. Whitesides, “The origins and future of microfluidics,” Nature, vol. 442, no. 7101, pp. 368–373, Jul. 2006. [2] Z. Yu, Y. Lee, M. Wong, and Y. Zohar, “Fluid flows in microchannels with cavities,” J. Microelectromech. Syst., vol. 14, no. 6, pp. 1386–1398, Dec. 2005. [3] C. Buie, D. Kim, S. Litster, and J. Santiago, “An electro-osmotic fuel pump for direct methanol fuel cells,” Electrochem. Solid-State Lett., vol. 10, no. 11, pp. B196–B200, 2007. [4] J. Wu, “AC electro-osmotic micropump by asymmetric electrode polarization,” J. Appl. Phys., vol. 103, no. 2, p. 024 907, Jan. 2008. [5] W. H. Huang, F. Ali, Z. L. Wang, and J. K. Cheng, “Recent advances in single-cell analysis using capillary electrophoresis and microfluidic devices,” J. Chromatogr. B, Anal. Technol. Biomed. Life Sci., vol. 866, no. 1/2, pp. 104–122, Apr. 2008. [6] N. Pamme, “Magnetism and microfluidics,” Lab Chip, vol. 6, no. 1, pp. 24–38, 2006. KEDZIERSKI et al.: NEW GENERATION OF DIGITAL MICROFLUIDIC DEVICES [7] M. Schneider, Z. Guttenberg, S. Schneider, K. Sritharan, V. Myles, U. Pamukci, and A. Wixforth, “An acoustically driven microliter flow chamber on a chip (μFCC) for cell–cell and cell–surface interaction studies,” ChemPhysChem, vol. 9, no. 4, pp. 641–645, Mar. 2008. [8] Z. Jiao, N.-T. Nguyen, and X. Huang, “Thermocapillary actuation of liquid plugs using a heater array,” Sens. Actuators A, Phys., vol. 140, no. 2, pp. 145–155, Nov. 2007. [9] A. Darhuber, J. Valentino, S. Troian, and S. Wagner, “Thermocapillary actuation of droplets on chemically patterned surfaces by programmable microheater arrays,” J. Microelectromech. Syst., vol. 12, no. 6, pp. 873– 879, Dec. 2003. [10] H. van Lintel, F. van de Pol, and S. Bouwstra, “A piezoelectric micropump based on micromachining of silicon,” Sens. Actuators, vol. 15, no. 2, pp. 153–167, Oct. 1988. [11] F. Mugele and J.-C. Baret, “Electrowetting from basics to applications,” J. Phys. Condens. Matter, vol. 17, no. 28, pp. R705–R774, Jul. 2005. [12] A. Quinn, R. Sedev, and J. Ralston, “Influence of the electrical double layer in electrowetting,” J. Phys. Chem. B, vol. 107, no. 5, pp. 1163–1169, Feb. 2003. [13] T. Jones, “An electromechanical interpretation of electrowetting,” J. Micromech. Microeng., vol. 15, no. 6, pp. 1184–1187, Jun. 2005. [14] J. Kedzierski and S. Berry, “Engineering the electrocapillary behavior of electrolyte droplets on thin fluoropolymer films,” Langmuir, vol. 22, no. 13, pp. 5690–5696, Jun. 2006. [15] S. Berry, J. Kedzierski, and B. Abedian, “Low-voltage electrowetting using thin fluoropolymer films,” J. Colloid Interface Sci., vol. 303, no. 2, pp. 517–524, Nov. 2006. [16] S. Kuiper and B. H. W. Hendriks, “Variable-focus liquid lens for miniature cameras,” Appl. Phys. Lett., vol. 85, no. 7, pp. 1128–1130, Aug. 2004. [17] B. Berge and J. Peseux, “Variable focal lens controlled by an external voltage: An application of electrowetting,” Eur. Phys. J. E, Soft Matter, vol. 3, no. 2, pp. 159–163, Oct. 2000. [18] Y. J. Chang, K. Mohseni, and V. Bright, “Fabrication of tapered SU-8 structure and effect of sidewall angle for variable focus microlens using EWOD,” Sens. Actuators A, Phys., vol. 136, no. 2, pp. 546–553, May 2007. [19] R. Shami, D. Andelman, B. Berge, and R. Hayes, “Water, electricity, and between: On electrowetting and its applications,” Soft Matter, vol. 4, no. 1, pp. 38–45, 2008. [20] R. van Dijk, B. Feenstra, R. Hayes, I. Camps, R. Boom, M. Wagemans, A. Giraldo, B. Heijden, R. Los, and H. Feil, “Gray scales for video applications on electrowetting displays,” in SID Symp. Dig. Tech. Papers, 2006, vol. 37, no. 1, pp. 1926–1929. [21] B. Sun, K. Zhou, Y. Lao, J. Heikenfeld, and W. Cheng, “Scalable fabrication of electrowetting displays with self-assembled oil dosing,” Appl. Phys. Lett., vol. 91, no. 1, p. 011 106, Jul. 2007. [22] K. Blankenbach, A. Schmoll, A. Bitman, F. Bartels, and D. Jerosch, “Novel electrowetting displays,” in SID Symp. Dig. Tech. Papers, 2007, vol. 38, no. 1, pp. 618–621. [23] H. Hosono, W. Satoh, J. Fukuda, and H. Suzuki, “On-chip handling of solutions and electrochemiluminescense detection of amino acids,” Sens. Actuators B, Chem., vol. 122, no. 2, pp. 542–548, Mar. 2007. [24] V. Srinivasan, V. Pamula, M. Pollack, and R. Fair, “A digital microfluidic biosensor for multianalyte detection,” in Proc. IEEE 16th Annu. Int. Conf. Micro Electro Mech. Syst., 2003, pp. 327–330. [25] R. Fair, “Digital microfluidics: Is a true lab-on-a-chip possible?” Microfluid. Nanofluid., vol. 3, no. 3, pp. 245–281, Jun. 2007. [26] S. K. Cho, H. Moon, and C. J. Kim, “Creating, transporting, cutting, and merging liquid droplets by electrowetting-based actuation for digital microfluidic circuits,” J. Microelectromech. Syst., vol. 12, no. 1, pp. 70–80, Feb. 2003. [27] Y.-H. Chang, G.-B. Lee, F.-C. Huang, Y.-Y. Chen, and J.-L. Lin, “Integrated polymerase chain reaction chips utilizing digital microfluidics,” Biomed. Microdevices, vol. 8, no. 3, pp. 215–225, Sep. 2006. [28] D. Jary, A. Chollat-Namy, Y. Fouillet, J. Boutet, C. Chabrol, G. Castellan, D. Gasparutto, and C. Pepponet, “DNA repair enzyme analysis on EWOD fluidic microprocessor,” in Proc. NSTI Nanotech Tech., 2006, vol. 2, pp. 554–557. 851 [29] U.-C. Yi and C.-J. Kim, “Soft printing of droplets premetered by electrowetting,” Sens. Actuators A, Phys., vol. 114, no. 2/3, pp. 347–354, Sep. 2004. [30] M. Pollack, A. Shenderov, and R. Fair, “Electrowetting-based actuation of droplets for integrated microfluidics,” Lab Chip, vol. 2, no. 2, pp. 96–101, May 2002. [31] K.-S. Yun, I.-J. Cho, J.-U. Bu, C.-J. Kim, and E. Yoon, “A surfacetension-driven micropump for low-voltage and low-power operations,” J. Microelectromech. Syst., vol. 11, no. 5, pp. 454–461, Oct. 2002. [32] F. Malloggi, A. Vanapalli, H. Gu, D. van den Ende, and F. Mugele, “Electrowetting-controlled droplet generation in a microfluidic flowfocusing device,” J. Phys. Condens. Matter, vol. 19, no. 46, p. 462 101, Nov. 2007. [33] A. W. Adamson and A. P. Gast, Physical Chemistry of Surfaces. New York: Wiley, 1997, ch. II and V. Jakub Kedzierski received the Ph.D. degree in electrical engineering from the University of California, Berkeley, in 2001. After his graduation, he was with the IBM T. J. Watson Research Center, working on advanced silicon devices. In 2005, he joined the Lincoln Laboratory, Massachusetts Institute of Technology, Lexington, where he is currently the Assistant Group Leader of the Advanced Silicon Technology Group. His research interests include FinFETs, silicon nanowires, fully silicided gates, metal source/drains, and fully depleted silicon-on-insulator technology. His current research efforts are focused on graphene transistors, low-power electronics, and electrocapillary microfluidics. Shaun Berry received the Ph.D. degree in mechanical engineering, studying microfluidics and the electrowetting phenomenon, from Tufts University, Medford, MA, in 2008. Since 1998, he has been a Staff Member in the Lincoln Laboratory, Massachusetts Institute of Technology, Lexington, working on various electrooptical systems. His research interests include fluid and structural numerical simulations, microfluidics, and the development of chemical/biological sensors. Behrouz Abedian received the Ph.D. degree in mechanical engineering from Massachusetts Institute of Technology, Lexington, in 1980. His Ph.D. research was focused on electric charging in pipe flows. Since 1981, he has been a Faculty Member in the Department of Mechanical Engineering, Tufts University, Medford, MA, where he was the Department Chair from 1988 to 1993. His research interests include flow-induced dielectric charging phenomenon and the fundamental and applied aspects of fluid mechanics, in particular, electrochemical transport, megnetohydrodynamics, adhesion, piezoelectric effects, and properties of dental polymers. He is the holder of four patents on fluidic devices.