Dynamic models. Slides for 19. august 2003 lecture 1 Introduction
advertisement

1
Dynamic models. Slides for 19. august 2003
lecture
Introduction
Useful macroeconomic theories should help us understand the behaviour of
macroeconomic time series.
Examples (hand out)
Formally
Ragnar Nymoen
University of Oslo, Department of Economics
yt is a time series if we observe it over a sequence of time periods represented
by the subscript t., i.e., {yT , yT −1, ..., y1} if we have observations from period
1 to T . Usually, we use the simpler notation yt, t = 1, ...., T ,
August 19, 2003
2
1
Typically, economic agents need/take time to adjust to changes in circumstances.
Instantaneous adjustment is the exception in economics. Adjustment lags the
rule.
Dynamic behaviour is pervasive in economics.
Models with a dynamic formulation therefore needed.
Static models nevertheless has an important role:
• as a first approximation to actual behaviour when the adjustment is fast
relative to the time period.
— static model of the exchange rate market maybe OK when we have a
annual or quarterly observations in mind.
— need dynamic model if monthly, daily, hourly data
• as steady state relationships, derived from and consistent with dynamic
models.
3
2
Static and dynamic models
Static consumption functions:
(linear)
Ct = β0 + β1IN Ct + et,
ln Ct = β0 + β1 ln IN Ct + et, (log-linear)
(1)
Textbooks usually omit the term et in equation (1), but for applications of the
theory to actual data it is a necessary to get an intuitive grip on this disturbance
term in the static consumption function.
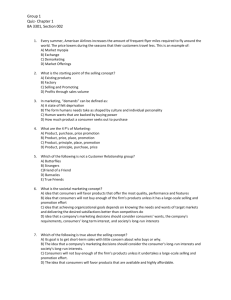
Using quarterly data for Norway, for the period 1967(1)-2002(4), we obtain by
using the method of least squares method (in PcGive):
ln Ĉt = 0.02 + 0.99 ln IN Ct
(2)
where the “hat” in Ĉt is used to symbolize the fitted value. Next, use (1) and
(2) to define the residual êt:
êt = ln Ct − ln Ĉt,
which is the empirical counterpart to et.
4
(3)
12.0
A dynamic consumption function:
11.8
ln Ct = β0 + β1 ln IN Ct + β2 ln IN Ct−1 + α ln Ct−1 + εt
(4)
11.6
ln C
t
called autoregressive distributed lag model, ADL. Estimated:
11.4
ln Ĉt = 0.04 + 0.13 ln IN Ct + 0.08 ln IN Ct−1 + 0.79 ln Ct−1
(5)
11.2
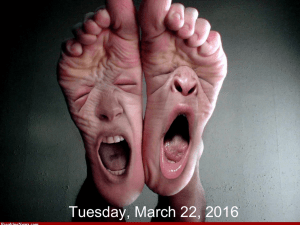
Compare, residuals ε̂t and êt to judge which model is best (see graph).
11.0
Which explanatory variables contribute most to the improved fit?
11.0
11.1
11.2
11.3
11.4
11.5
ln IN C
11.6
11.7
11.8
11.9
12.0
t
Figure 1: The estimated static consumption function.
6
5
3
0.15
Residuals of (2.7)
Residuals of (2.4)
Dynamic multipliers
0.10
0.05
Assume that income rises by 1% in period t, so instead of IN Ct we have
IN Ct0 = INCt(1 + 0.01). Using (5) we have
0.00
-0.05
ln(Ĉt(1+δc,0) = 0.04+0.13 ln(IN Ct(1+0.01))+0.08 ln IN Ct−1 +0.79 ln Ct−1
-0.10
-0.15
-0.20
-0.25
1965
1970
1975
1980
1985
1990
1995
2000
where δc,0 denotes the relative increase in consumption in period t, the first
period of the income increase. Since ln(1 + x) ≈ x when −1 < x < 1, and
noting that
ln Ĉt − 0.04 − 0.13 ln IN Ct − 0.08 ln IN Ct−1 − 0.79 ln Ct−1 = 0
Figure 2: Residuals of the two estimated consumptions functions (2), and (5),
we obtain δc,0 = 0.0013, meaning that in percentage terms the immediate
effect is a 0.13% rise in consumption.
7
8
What happens in the second period after the shock? Note first that the estimated model also holds for period t + 1, hence
ln(Ĉt+1(1 + δc,1) = 0.04 + 0.13 ln(IN Ct+1(1 + 0.01))
+ 0.08(ln IN Ct(1 + 0.01) + 0.79 ln(Ct + δc,0),
after the shock. The relative increase in Ct in period t + 1 becomes
δc,1 = 0.0013 + 0.0008 + 0.79 × 0.0013 = 0.003125,
or 0.3%. By following the same way of reasoning, we find that the percentage
increase in consumption in period t + 2 is 0.46% (formally δc,2 × 100).
Since δc,0 measures the direct effect of a change in IN C, it is usually called the
impact multiplier, and is defined by taking the partial derivative ∂ ln Ct/∂ ln IN Ct
in equation (5). The dynamic multipliers δc,1, δc,2, ...δc,∞ are in their turn
linked by the dynamics of equation (5), namely
δc,j = 0.13δinc,j + 0.08δinc,j−1 + 0.79δc,j−1, for j = 1, 2, ....∞.
(6)
For example, for j = 3, and setting δinc,3 = δinc, = 0.01, a permanent rise in
income, we obtain
δc,3 = 0.0013 + 0.0008 + 0.79 × 0.0046 = 0.005734
or 0.57% in percentage terms. The long-run multiplier : Set δc,j = δc,j−1 =
δc,long−run we obtain
0.0013 + 0.0008
= 0.01,
1 − 0.79
a 1% permanent increase in income has a 1% long-run effect on consumption.
δc,long−run =
9
10
1.00
1.10
Temporary change in income
Percentage change
Percentage change
0.50
1.00
0.25
0.95
0
20
40
60
20
40
60
Period
1.00
0.10
0.75
Dynamic consumption multipliers (permanent change in income)
0.50
0.05
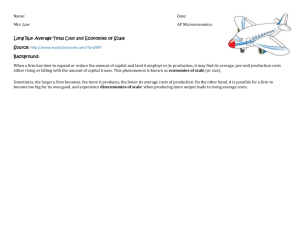
Table 2: Dynamic multipliers of the estimated consumption function in (5),
percentage change in consumption after a 1 percent rise in income.
0
Period
Dynamic consumtion multipliers (temporary change in income)
Percentage change
Permanent 1% change Temporary 1% change
0.13
0.13
0.31
0.18
0.46
0.14
...
...
1.00
0.00
1.05
Percentage change
Impact period
1. period after shock
2. period after shock
...
long-run multiplier
Permanent change in income
0.75
0.25
0
20
40
Period
0
60
20
40
Period
60
Figure 3: Temporary and permanent 1 percent changes in income with associated dynamic multipliers of the consumption function in (5).
11
12
The distinction between short and long-run multipliers permeates modern macroeconomics, and so is not special to the consumption function!
B&W:
Chapter 8, on money demand, Table 8.4.
Chapter 12, where short and long-run supply curves are derived.
4
Reconciling dynamic and static models
Note that in our consumption function example where the long-run multiplier is
1.00, the estimated coefficient in equation (2) is 0.99. This is not a coincidence,
since the dynamic model accommodates a so called steady-state relationship
which is similar to the static model.
For example, the slopes of the short-run curves in figure 12.6 correspond to the
impact multipliers of the respective models, while the vertical long-run curve
suggest that the long-run multipliers are infinite (we’ll return to this)
To show this, consider again the ADL model, and let y denote the endogenous
variable while xt denotes the explanatory variable:
Svein Gjedrem on inflation targetting –
and re-write equation (7), so that the relationship between levels and growth
becomes clear.
yt = β0 + β1xt + β2xt−1 + αyt−1 + εt.
(7)
and many, more examples.
14
13
Step 1: Substract yt−1 on either side of the equation
yt − yt−1 = β0 + β1xt + β2xt−1 + (α − 1)yt−1 + εt
Step 2: Add and substract xt−1 on the right hand side:
yt − yt−1 = β0 + β1(xt − xt−1) + (β1 + β2)xt−1 + (α − 1)yt−1 + εt
Step 3: Use the difference operator ∆, meaning ∆yt = yt − yt−1, and write
the dynamic model as
∆yt = β0 + β1∆xt + (β1 + β2)xt−1 + (α − 1)yt−1 + εt
15
If yt and xt are measured in logarithms (like consumption and income in our
consumption function example) ∆yt and ∆xt are their respective growth rates.
Hence, for example, in the previous section
∆ ln Ct = ln(Ct/Ct−1) = ln(1 +
Ct − Ct−1
Ct − Ct−1
)≈
.
Ct−1
Ct−1
The model
∆yt = β0 + β1∆xt + (β1 + β2)xt−1 + (α − 1)yt−1 + εt
is therefore explaining the growth rate of consumption by, first, the income
growth rate and, second, the past levels of income and consumption. Since the
disturbance term is the same in (7) and in (??), the transformation is often
referred to as an 1-1 transformation of the ADL model.
16
For economic interpretation, is useful to collect the level terms yt−1 and xt−1
inside a bracket:
½
¾
β + β2
∆yt = β0 + β1∆xt − (1 − α) y − 1
+ εt,
(9)
x
1−α
t−1
and let us assume that we have the following economic theory about the longrun average relationship between y and x
y ∗ = k + γx
Consider a steady state situation in which ∆xt = gx, ∆yt = gy and εt = 0
(actually the mean of the disturbance term). The dynamic model (9) implies
the following steady state relationship between the levels of y and x (as long
as −1 < α < 1.):
−gy + β0 + β1gx
+ γx,
(12)
1−α
In sum, there is an important correspondence between the dynamic model and
a static theoretical relationship
y∗ =
(10)
Comparison with (9) shows immediately that we can identify the parameter γ
as
β + β2
γ≡ 1
, −1<α<1
(11)
1−α
meaning that the theoretical slope coefficient γ is identical to the long-run
multiplier of the dynamic model.
1. A theoretical linear relationship y ∗ = k + γx can be retrieved as the steady
state solution of the dynamic model (7).
2. The theoretical slope coefficient is identical to the corresponding long-run
multiplier (of a permanent increase in the respective explanatory variables).
3. Conversely, if we are only interested in quantifying a long-run multiplier
(rather than the whole sequence of dynamic multipliers), it can be found
by using the identity in (11).
18
17
5
After all we have said in favour of dynamic models, why don’t we give up static
equations altogether in macroeconomics?
Solution and stability
Mathematically speaking
yt = β0 + β1xt + β2xt−1 + αyt−1 + εt.
The reason is, as we have also argued, static models may have two (valid)
interpretations in macroeconomics:
is a first order linear difference equation for yt. As long as we have a known
initial condition that is given from history, y0, a solution exists.1 The solution
can however be stable, unstable or explosive.
1. As (approximate) descriptions of dynamics
The condition
−1 < α < 1
2. As corresponding to long-run, steady state, relationships.
(13)
is the necessary and sufficient condition for the existence of a (globally asymptotically) stable solution. Asymptotically there is no trace left of the initial
1 If
we open up for the possibility that the inital condition is not determined by history, but that
it may “jump” due to market forces, expectations formation etc, there are other solutions
to consider. Such solutions play a larger role in macroeconomics, but they belong to more
advanced courses.
19
20
condition y0. This is easy to see by starting with period 1 (treating y0 as
known), and iterating forward:
Stable solution −1 < α < 1. Since
(β0 + β1mx)
(15)
1−α
where y ∗ denotes the equilibrium of yt. The solution can also be expressed
as (see notes).
y1 = β0 + β1mx + αy0
y2 = β0 + β1mx + αy1
yt = y ∗ + αt(y0 − y ∗).
= β0(1 + α) + β1mx(1 + α) + α2y0
= (β0 + β1mx)(1 + α) + α2y0
Unstable solution (hysteresis) When α = 1, we obtain from equation (14):
y3 = β0 + β1mx + αy2
yt = (β0 + β1mx)t + y0, t = 1, 2, ...
= (β0 + β1mx)(1 + α + α2) + α3y0
αs + αty0, t = 1, 2, ...
(17)
showing that the solution contains a linear trend and that the initial condition exerts full influence over yt.
and thus, by induction, for period t
t−1
X
1 as t → ∞, we have:
αs → 1−α
s=0
y∗ =
For simplicity, set β2 = 0 and xt = mx, εt = 0. For the three first periods we
obtain
yt = (β0 + β1mx)
t−1
X
(14)
s=0
which is the general solution.
Explosive solution When α is greater than unity in absolute value the solution
is called explosive, for reasons that should be obvious when you consult
(14).
21
22
Exercise 5.1 Explain why the two stable solutions in 4 behave so differently!
Exercise 5.2 Indicate, in the graph for the unstable case, the predicted value
for y1 given the initial condition y0. What about ε1?
y*
y
0
t
time
0
Exercise 5.3 Sketch a solution path for the explosive solution in a diagram like
4.
y0
y
1
t0
t1
time
6
Dynamic systems
Figure 4: Two stable solutions of 7 (corresponding to two values of α, and two
unstable solutions (corresponding to two different initial conditions, see text)
It is often quite easy to bring the system of dynamic equations on a form with
two reduced form dynamic equations that are of the same form that we have
considered above.
23
24
Consumption function again. Convenient to use a linear specification:
Ct = β0 + β1IN Ct + αCt−1 + εt
(18)
together with the stylized product market equilibrium condition
IN Ct = Ct + Jt
(19)
where Jt denotes autonomous expenditure, and IN C is now interpreted as
GDP. We assume that there are idle resources (unemployment) and that prices
are sticky. The 2-equation dynamic system has two endogenous variables Ct
and IN Ct, while Jt and εt are exogenous.
Equation (20) is a first order difference equation, so the theory of the previous
section applies. If −1 < α̃ < 1 the solution is stable. In that case, there is
also a stable solution for IN Ct, so we don’t have to derive a separate equation
for IN Ct in order to check stability of income.
The impact multiplier of consumption with respect to autonomous expenditure
is β̃2, and the long-run multiplier is β2/(1 − α̃).
Equation (20) is called the final equation for Ct.
To find the solution for consumption, simply substitute IN C from (19), and
obtain
Ct = β̃0 + α̃Ct−1 + β̃2Jt + ε̃t
(20)
References
where β̃0 and α̃ are the original coefficients divided by (1 − β1), and β̃2 =
β1/(1 − β1), (what about ε̃t?).
25
26