Recent advances and trends in subsea technologies and seafloor properties characterization
advertisement

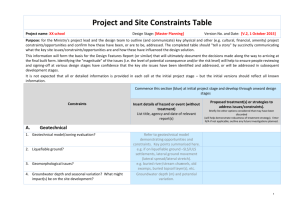
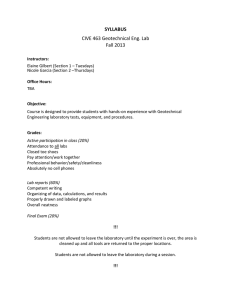
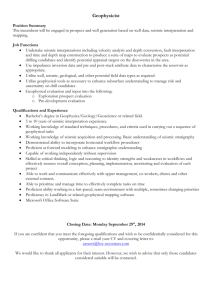
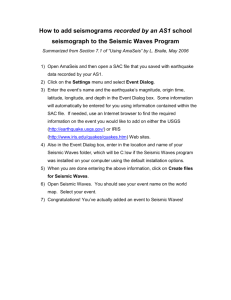
Recent advances and trends in subsea technologies and seafloor properties characterization The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation Djikpesse, Hugues, Jorge Fiori F. Sobreira, Andy Hill, Kelly Wrobel, Ralph Stephen, Michael Fehler, Kerry Campbell, Olivier Carrière, and Shuki Ronen. “Recent Advances and Trends in Subsea Technologies and Seafloor Properties Characterization.” The Leading Edge 32, no. 10 (October 2013): 1214–1220. © 2013 by The Society of Exploration Geophysicists. As Published http://dx.doi.org/10.1190/tle32101214.1 Publisher Society of Exploration Geophysicists Version Final published version Accessed Wed May 25 19:07:31 EDT 2016 Citable Link http://hdl.handle.net/1721.1/88175 Terms of Use Article is made available in accordance with the publisher's policy and may be subject to US copyright law. Please refer to the publisher's site for terms of use. Detailed Terms SPECIAL G e o h SECTION: a z a r dG s e o h a z a r d s 5HFHQWDGYDQFHVDQGWUHQGVLQVXEVHDWHFKQRORJLHVDQGVHDÁRRU properties characterization HUGUES DJIKPESSE, Schlumberger JORGE FIORI F. SOBREIRA, Petrobras ANDY HILL, BP KELLY WROBEL, ExxonMobil RALPH STEPHEN, Woods Hole Oceanographic Institution MICHAEL FEHLER, Massachusetts Institute of Technology KERRY CAMPBELL, Fugro GeoConsulting OLIVIER CARRIÈRE, Scripps Institution of Oceanography SHUKI RONEN, Seabed Geosolutions F ollowing the 2012 SEG Annual Meeting in Las Vegas, the SEG Research Committee sponsored a post-convention research workshop on subsea technologies, in general, and on seafloor characterization in particular. The goal of the workshop was to share experiences in acquisition, processing and applications of geotechnical and geophysical measurements for seafloor property characterization. This includes: • To help geophysicists in better understanding geotechnical seafloor measurements, e.g., when and how they are collected as well as their actual field applications; • To help geotechnical specialists in better understanding geophysical seafloor measurements, how they are derived, and their importance for accurate seismic waveform modeling and inversion; • To discuss technology and application trends, and how the geophysical community can participate in the fast-growing market for subsea operations in the oil and gas industry. The workshop was co-organized by Hugues Djikpesse (Schlumberger-Doll Research) and Kelly Wrobel (ExxonMobil). It started with a keynote address by Ralph Stephen (Woods Hole Oceanographic Institution) who updated the audience of mostly geophysicists on what geotechnical seafloor measurements are and how they are typically collected. It was succeeded by a second keynote address by Andy Hill (BP) who presented successful applications, as well as pitfalls, in using geophysical measurements to prevent marine geohazards issues in offshore operations in a variety of settings, shelf and deep water, from around the world. A major issue outlined by Hill was the interpretation and extrapolation of geotechnical engineering properties from geophysical measurements. Indeed, the two families of measurements are often collected at different scales and for analyzing the rock at different strain regimes (Figure 1). Technology trends in automated underwater vehicles (AUV) and subsea nodes were discussed by Kerry Campbell (Fugro) and Shuki Ronen (Seabed Geosolutions), respectively. Two promising applications were identified. Fiori Sobreira (Petrobras) presented an innovative way of relating information contained in multicomponent seismic data, elastic parameters, and geotechnical measurements. Such relations can help regionally predict the geotechnical behavior of the 1214 The Leading Edge October 2013 marine shallow section, while also being useful for full-waveform seismic modeling. The second application is the use of Scholte waves generated at seafloor irregularities to characterize seafloor properties. It resulted from the presentations by Michael Fehler (MIT) and Olivier Carrière (Scripps Institution of Oceanography). To motivate a larger audience of geotechnical survey specialists and geophysicists about subsea technologies and seafloor properties characterization, we present a series of examples illustrating different aspects of the workshop. Geotechnical measurements and seafloor properties One way to estimate seabed properties in a wide range of applications including petroleum exploration, seafloor installations, offshore drilling, seafloor mine countermeasures, and bottom interacting ocean acoustics is the use of seismoacoustic techniques. Although we like to think of the seafloor as a simple, flat interface between water and sediment there are many complicating factors. The seafloor is often rough and heterogeneous over scale lengths from centimeters to hundreds of meters. Figure 1. Schematic illustration showing geophysical and geotechnical soil-testing approaches corresponding to various strain levels and various problem areas. μ is the shear modulus, μ0 is the shear modulus or stiffness at very small strain, l is the density, VS is the shear-velocity, and the cone resistance (qC ) is indicative of the soil strength. It is the ratio between the total force (Q C ) acting on the cone, used during the geotechnical standard (SPT) or cone-penetration test (CPT), and the projected area (AC ) of the cone. From Ghose and Goudswaard, 2004. G e o h a z a r d s The rigidity of the seafloor supports shear and interface waves (e.g., Scholte waves) in addition to compressional waves. The sediments themselves can have significant porosity and in some cases can be filled with free gas. Significant intrinsic and effective attenuation and anisotropy have been observed. For example, Ewing et al. (1992) reported the results of careful interface wave experiments carried out off Martha’s Vineyard and New Jersey in 10–20 m water depths: “We have demonstrated that high-resolution longitudinal and transverse mode shear data can be obtained in shallow water Figure 2. The LOAPEX underwater acoustic projector. (Courtesy of Alliant Techsystem (from Mercer et al., 2009)). regions. ... Anisotropy and lateral heterogeneity are important features of sedimentary structure and processes; ... Shear data are more difficult to obtain than compressional, and horizontally polarized shear is more difficult to obtain than vertically polarized shear.” Shear-wave speeds as slow as 25–50 m/s were observed in the upper 2 m of the seafloor. Dispersion, frequency-dependent sound speed, is a necessary consequence of intrinsic attenuation and this has been observed in porous sediments and modeled over the frequency band from 100 Hz to 1 MHz (Jackson and Richardson, 2007). Vertical seismic profiling (VSP) and offset VSP provide an important link between the fine-scale (centimeters to meters) well logging and core measurements in boreholes Figure 3. Conceptual diagram illustrating the Hugin 3000 autonomous underwater vehicle (AUV), which can simultaneously collect 200 kHz multibeam echo sounder, 120 or 410 kHz side-scan sonar, and 2–12 kHz chirp sub-bottom profiler seismic data. Inset is a photo of an AUV about to be launched. (Courtesy of Fugro.) Figure 4. (a) Chair-cut view of sub-bottom profiler 3D micro volume showing small faults and a gas/hydrate chimney. Approximate overall dimensions of volume are: 1280 × 1640 ft, with approximately 130 ft of effective penetration below seafloor. (b) Sub-bottom profiler inline 102 showing details of a gas/hydrate chimney and small faults A, B, and C. Inset is similarity variance time slice 1.381 s showing location of inline. Note that the vertical offset on fault A is less than 1 ft and is barely perceptible on the inline, but the areal extent of fault A is nonetheless clearly shown on the time slice. (Courtesy of Fugro.) October 2013 The Leading Edge 1215 G e o h a z a r d s Figure 5. An example of a pseudo-geotechnical section (pseudo-Su, in Pa units) in the Marlim-Voador Field that was derived using the inverted shear modulus from seismic data. A few horizons and Su logs from geotechnical boreholes are superimposed on the figure. Vertical axis is depth, ranging from about 300 to 1300 m and the horizontal length of the section is about 5 km. (Courtesy of Petrobras.) and the large scale (hundreds of meters to kilometers) surface seismic surveys (Little and Stephen, 1985). There are vertical and horizontal heterogeneities at all scales, and the effective medium properties depend on the wavelength of the sound used for excitation. Controlled acoustic sources, such as land vibroseis systems, enable well controlled sweeps, typically over 30 s. Pulselike time series are recovered by replica correlation. Although not as loud as airguns, improved temporal and spatial resolution (27 ms in time and 40 m in range) can be achieved (Figure 2) (Mercer et al., 2009). Autonomous underwater vehicles (AUV) are important survey tools for deep-water seafloor characterization (Figure 3). AUVs are unmanned and untethered, follow preprogrammed survey patterns, and carry geophysical survey tools that provide detailed images of the seafloor and shallow sediments. One of the AUV survey tools is a high-frequency (2–12 kHz chirp) seismic sub-bottom profiler, which has ±1 ft vertical resolution and an effective penetration below the seafloor that typically ranges between a few tens of feet to as much as 375 ft, depending on local subsurface conditions. Recent advances in AUV survey technology have made possible applications such as 3D micro surveys of small and precisely targeted sites (for example, the area under the tension-leg platform). Such surveys typically use line spacing of 1216 The Leading Edge October 2013 approximately 6.5 ft or 13 ft (2 m or 4 m). These are referred to as AUV3Dm surveys. The result is a sub-bottom profiler 3D seismic volume (Figure 4a) that shows foundation-zone conditions in unprecedented detail, which is critical for facilitiesengineering applications. The AUV3Dm volumes can be analyzed using conventional 3D seismic interpretation software to provide a near-outcrop-scale characterization of stratigraphy, geologic features, and any anomalies (Figure 4b), without the data gaps inherent to 2D seismic data (Campbell et al., 2013). Geotechnical characterization offshore Brazil from seismic data elastic inversion In a pioneer study, Sobreira et al., (2010, 2011) proposed an innovative approach to extract geotechnical information indirectly (however regionally and cost-effectively) from both conventional and multicomponent seismic data available from two areas offshore of Brazil (Albacora and MarlimVoador oil fields, in the Campos Basin). After an initial, qualitative comparison, it was observed that elastic properties and moduli derived from seismic inversion (especially for the case of shear and Young’s modulus) correlated well with direct geotechnical information such as the geotechnical parameters undrained shear strength (Su) and net cone resistance (qnet). While the latter is the total cone resistance of the cone-penetration test (CPT) compensated for the vertical G e o h a z a r d s stress related to the total overburden pressure, the former is essentially qnet scaled by a soil-dependent factor, specific to each area. These results lead to a more quantitative step, based on the crossplot between inverted elastic moduli and geotechnical parameters. Empirical equations (valid rather locally) enabled the quantitative extraction of geotechnical parameters, i.e., predicted or pseudo-Su and predicted or pseudo-qnet anywhere within the seismic volume (Figure 5). Comparisons between pseudo-geotechnical logs thus derived and geotechnical logs obtained directly from in-situ measurements (geotechnical boreholes) have provided promising results (Figure 6). From this investigation, it may be concluded that: • Real and predicted geotechnical parameters agree well, in the sense that major natural geotechnical contrasts can be reproduced in spite of the intrinsic differences in strain regimes and resolution to which seismic and geotechnical measurements are related to (Figure 1). • Elastic moduli related to shear wave (such as shear and Young’s modulus) as well as the pseudo-geotechnical parameters extracted from them show a better correlation with direct geotechnical parameters than those related to compressional wave only (such as bulk modulus). The former are fundamentally related to the frame’s properties such as rigidity. • Incorporation of elastic seismic processes (namely simultaneous and/or joint inversion) and of elastic seismic info (namely multicomponent data, including PS-wave) provided special robustness to the results. This is a major breakthrough. It allows the transformation from geotechnical measurements into elastic moduli. The latter can be used for full-waveform modeling of seismic data acquired over unconsolidated seabed sediments. Scholte wave modeling for seafloor properties estimation Scholte waves are guided by the water-sediment interface at the seafloor. They exhibit their highest amplitude at the seafloor while their amplitude decays exponentially upward into the water and downward into the sub-bottom. The excitation of Scholte waves by sources within the ocean is influenced by the elastic properties of the sediments near the seafloor. If sources are located more than several tens of meters above the water-sediment interface there is minimal excitation of Scholte waves, although scattering at the seafloor also excites them. When Scholte waves are generated, the amplitude and spectrum of the excited waves are most influenced by the shear-wave velocity of the sediments. Numerical modeling of Scholte waves in regions where there are strong variations in seafloor topography can be problematic. If grid-based methods like finite differences are used, numerical noise may appear in the simulations that has the character of energy that is trapped at certain locations. Boundary element methods do a much better job at simulating Scholte-wave propagation in regions where there is seafloor topography. Figure 7 shows results of two simulations for a 2D model whose seafloor topography is taken from the SEAM Phase I deep-water model (Fehler, 2012). Figure 7a shows the structure that consists of a water layer over a solid sedimentary layer. Figure 7b shows the pressure on the seafloor as simulated using a 2D finite-difference algorithm. Figure 7c shows the seafloor pressure simulated using a 2D boundary element approach. Various phases are labeled in the lower panel. Both the finite-difference and boundary element approaches show direct and head waves from the source located near the surface of the model. Scholte waves, which propagate slowly, are also seen, and it is clear that Scholte waves are generated by scattering at locations where changes in seafloor topography take place. However, the finite-difference simulations have stationary noise that also seems to originate at locations where there are strong changes in seafloor topography. The Scholte wave velocity is less than the S-wave velocity of the sediments. It is interesting to note that once Scholte waves are excited, the dispersion characteristics of the waves can be measured and used to infer the near-seafloor S-wave velocity profile. Seabed interferometry Seismic interferometry can be used to extract sub-bottom reflected waves from multicomponent data collected with Figure 6. Comparison between pseudo-qnet values predicted from both inverted bulk and shear moduli and in-situ (filtered) qnet measurements for the Albacora Field. Please note that the former captures natural contrasts that the latter cannot. (Courtesy of Petrobras.) October 2013 The Leading Edge 1217 G e o h a z a r d s Figure 7. (a) SEAM topography profile; (b) shot gather from finitedifference modeling normalized to the maximum amplitude; (c) shot gather by BEM normalized to the maximum amplitude. ocean bottom seismometers (OBS). Seismic interferometry is an emerging data processing technology to extract empirical Green’s functions (EGF) from crosscorrelations of signals received at two OBS locations, averaged over multiple shots or long time recording (Curtis et al., 2006). It is relevant in most seismic sensor deployments. This seismic interferometry concept not only is attractive for active surveying, but also provides an excellent framework for passive applications, i.e., when sensors record ambient noise (earthquakes, microseisms, shipping noise, fracturing, etc.). The crosscorrelation creates a virtual source everywhere an actual sensor is found, resulting in a model-independent redatuming. This redatuming process actually removes the need of precise knowledge of source geometry or shooting times. The nature of imaged waves essentially depends on the sensors: PP reflections emerge from hydrophone or vertical geophone crosscorrelations, while the introduction of one or two horizontal geophones in the crosscorrelations enables the imaging of PS or SS reflections. Surface waves, such as Scholte, can be retrieved as well. Here we focus on its application with ocean bottom seismometers (OBS). 4C-OBS combine a hydrophone and a three-component geophone. They can be released from the surface or deployed by a remotely operated vehicle and record data for long periods of time. Figure 8 shows an example of PP interferometric processing, using active survey data acquired on an OBS array deployed at the Woolsey Mound, Northern Gulf of Mexico, in April 2011. A complete description of the interferometric processing applied to this data set is available in Carrière and Gerstoft (2013). Upgoing/downgoing wavefield separation is performed by combining collocated pressure and particle velocity sensors and provides an efficient wavelet signature deconvolution approach (Backus et al., 2006). The survey geometry is illustrated in Figure 8a, while an example of a shot recording is shown in Figure 8b. Interferometric processing was restricted to closely spaced sensors (OBS 01–OBS 11). Crosscorrelations of segmented signals were averaged to give 1218 The Leading Edge October 2013 Figure 8. Interferometric processing of active survey OBS data in the Gulf of Mexico. (a) A gas-injection gun was towed along a 5.5-km track near the surface (stars), above the OBS (squares), in 900-m water depth. OBS 12, 13, 14, and 15 were 500 m apart. (b) Normalized pressure (red) and vertical particle velocity (blue) signals on the OBS, shot number 51. The source is near vertical incidence for OBS 13 [red star in (a)]. The first water multiple is distinguished 1 s after the direct arrival. (c) Stacked empirical Green’s functions extracted from pressure signal crosscorrelations, involving downgoing wavelet deconvolution, common midpoint stacking and normal moveout (NMO) correction. (d) Conventional upgoing/downgoing seismic processing, involving downgoing wavelet deconvolution, NMO correction and common depth-point conversion. For reference, several reflection events (dotted) and principal interfaces (arrows), identified with conventional upgoing/downgoing seismic processing, are shown. the EGF for each OBS pair. Stacking EGF at the common midpoint results in a horizontal resolution of half the receiver spacing (12.5 m, Figure 8c). Conventional upgoing/downgoing seismic processing, as developed in Backus et al. (2006), was applied to the same data set for comparison (Figure 8d). The three main interfaces are identified, with consistent polarity and relative amplitudes, although interferences from a distant seismic survey perturb the processing. The second interface (0.2 s) has a negative polarity, which might indicate the base of the hydrate stability zone. The third reflector corresponds most likely to the top of the salt dome identified in deep seismic data acquired on a larger zone at the same location. No relevant reflections were detected below the third reflector. G e o h a z a r d s Most commercial OBS surveys are deployed on the seabed by ROVs (Figure 9). The nodes record reflections of air gun sources near the surface. Data are imaged (Ronen et al., 2012) and provide sharp graphical descriptions of shallow gas (Figure 10). Conclusion This workshop discussed some of the geophysical survey and geotechnical tools, technologies, and methods being used to characterize seafloor and shallow soil conditions and geohazards for offshore production infrastructure siting and foundation design. Looking into the future, transforming 3D micro seismic volumes into Earth volumes from which one would be able to directly extract materials properties is an important and achievable goal. Although researchers have made some progress toward this goal, and efforts are increasing on several fronts, the remaining challenge is significant. Provided that advanced Scholte-wave signals detection, modeling and inversion methods are made available, the use of Scholte waves to estimate seafloor properties seems promising. Another area of possible interest is the analysis of drill bit samples to infer elastic properties of unconsolidated sediments beneath the seafloor. More innovation is expected with autonomous marine vehicles, such as the Wave Glider (Figure 11) that can operate offshore for up to a year, for autonomous data collection and subsea surveillance. Global subsea capital expenditures are forecast to more than double in size over the next five years. Most of this growth is subsea production-oriented.The fast-growing number of deep-water Figure 9. Remotely operated vehicle retrieving ocean-bottom nodes in the Forties Field. (Courtesy of Apache.) October 2013 The Leading Edge 1219 G e o h a z a r d s Figure 10. Inline and crossline through a 3D image of shallow hazards under a platform in the Forties Field. (Courtesy of Apache.) wells and the expected emergence of large production of methane hydrates can only increase interest in exploration subsea technologies and seafloor properties characterization. References Backus, M. M., P. E. Murray, B. A. Hardage, and R. J. Graebner, 2006, High-resolution multicomponent seismic imaging of deepwater gas-hydrate systems: The Leading Edge, 25, no. 5, 578–596, http://dx.doi.org/10.1190/1.2202662. Campbell, K. J., S. Smith, and C. Pastor, 2013, AUV3Dm: Detailed characterization of shallow soil strata and geohazards using AUV sub-bottom profiler 3D micro volumes: Offshore Technology Conference paper OTC 23950. Carrière, O. and P. Gerstoft, 2013, Deep-water subsurface imaging using OBS interferometry: Geophysics, 78, no. 2, Q15–Q24, http://dx.doi.org/10.1190/geo2012-0241.1. Curtis, A., P. Gerstoft, H. Sato, R. Snieder, and K. Wapenaar, 2006, Seismic interferometry - turning noise into signal: The Leading Edge, 25, no. 9, 1082–1092, http://dx.doi.org/10.1190/1.2349814. Ewing, J., J. A. Carter, G. H. Sutton, and N. Barstow, 1992, Shallow water sediment properties derived from high-frequency shear and interface waves: Journal of Geophysical Research, 97, B4, 4739– 4762, http://dx.doi.org/10.1029/92JB00180. Fehler, M., 2012, SEAM update: elastic simulations: The Leading Edge, 30, no. 1, 24–25, http://dx.doi.org/10.1190/1.3679323. Ghose, R. and J. Goudswaard, 2004, Integrating S-wave seismicreflection data and cone-penetration-test data using a multiangle multiscale approach: Geophysics, 69, no. 2, 440–459, http:// dx.doi.org/10.1190/1.1707064. Jackson, D. R. and M. D. Richardson, 2007, High-frequency seafloor acoustics, in R. R. Goodman, H. P. Bucker, and I. Dyer (eds.), Underwater Acoustics, Springer. Little, S. A. and R. A. Stephen, 1985, Costa Rica Rift borehole seismic 1220 The Leading Edge October 2013 Figure 11. A Wave Glider, the world’s first wave-powered selfpropelled autonomous marine vehicle. It can collect measurements offshore for up to a year without requiring a crew, fuel, or a dedicated support vessel during its mission. (Courtesy of Liquid Robotics Oil and Gas, a joint venture between Liquid Robotics and Schlumberger.) experiment, Deep Sea Drilling Project Hole 504B, Leg 92: Initial Reports. DSDP, 83, 517–528. Mercer, J. A., J. A. Colosi, B. M. Howe, M. A. Dzieciuch, R. Stephen, and P. F. Worcester, 2009, LOAPEX: The long-range ocean acoustic propagation experiment: IEEE Journal of Oceanic Engineering, 34, no. 1, 1–11, http://dx.doi.org/10.1109/JOE.2008.2010656. Ronen, S., A. Rokkan, R. Bouraly, G. Valsvik, L. Larson, E. Ostensvig, J. Paillet, A. Dynia, A. Maltosz, S. Brown, S. Drummie, J. Holden, K. Koster, D. Monk, and M. Swanson, 2012, Imaging shallow gas drilling hazards under three Forties oil field platforms using ocean bottom nodes: The Leading Edge, 31, no. 4, 465–469, http://dx.doi.org/10.1190/tle31040465.1. Sobreira, J. F. F., M. Lipski, A. A. Carvalho, and E. Marquez, 2010, Geotechnical characterization based on seismic data approaches applied in Campos Basin, Southeastern Brazilian Margin: The Leading Edge, 7, 936–940. Sobreira, J. F. F., M. Lipski, A. A. Carvalho, and F. A. V. Artola, 2011, Extraction of geotechnical attributes from seismic data: towards a quantitative approach: Presented at 12th International Congress of the Brazilian Geophysical Society. Acknowledgments: The authors thank P. Gerstoft (Scripps Institution of Oceanography), M. Kucera, S. Smith, C. Pastor (Fugro), Y. Zheng, X. Fang (MIT), and H. Berg (Schlumberger) for their invaluable contributions. They also thank BP, ExxonMobil, Fugro, MIT, Scripps Institution of Oceanography, Seabed Geosolutions, Schlumberger, and Woods Hole Oceanographic Institution for allowing the publication of this work. Special thanks to C. E. Krohn of the SEG Research Committee. Corresponding author: HDjikpesse@slb.com