Coupling a vascular graph model and the surrounding tissue
advertisement

Coupling a vascular graph model and the surrounding tissue
to simulate flow processes in vascular networks
Timo Koch
12 September 2014
Title
Coupling a vascular graph model and the surrounding tissue
to simulate flow processes in vascular networks
Institutions
Principle Supervisor
Co-Supervisor Stuttgart
Supervisor Oslo
Co-Supervisor Oslo
Student
University of Stuttgart and Simula Research Laboratory Oslo
Prof. Rainer Helmig, University of Stuttgart
Dr. Natalie Schröder, University of Stuttgart
Prof. Kent-Andre Mardal, University of Oslo / Simula
André Massing, PhD, Simula Research Laboratory Oslo
Timo Koch, B.Sc., University of Stuttgart
Abstract
Mathematical models of fluid exchange in the microcirculation can help to understand complex
processes and may guide treatment of diseases in the future. To this end, a model with reduced
computational demand is investigated making it possible to model large networks of vessels in
interaction with the surrounding tissue. We derive a reduced model from a spatially resolved model
and assess the error made with the model reduction. A two step reduction results in a first model with
reduced vessel wall and finally in a second model with reduced vessel that couples a one-dimensional
vessel graph with a three-dimensional tissue domain through line sources. Firstly, we construct a
Darcy-Stokes coupled problem where the Darcy domain is separated from the Stokes domain by a
thin membrane. For this problem a new set of interface conditions is derived. A locally conservative
discontinuous Galerkin method is proposed to solve problems of this kind. Furthermore, it is shown
that iterative Robin-Robin domain decomposition can be a more efficient alternative to direct solvers
for Darcy-Stokes multi-compartment models. Secondly, it is shown that the reduced model is very
accurate and efficient for geometrically symmetric problems in a wide range of physically relevant
model parameters. Furthermore, it is shown that the error made by missing asymmetry features is
smaller than that of model parameter uncertainty. The reduced model is also solved numerically for
cases where the vascular graph can be chosen independently of the tissue grid.
Deutsche Zusammenfassung
Mathematische Modelle des Fluidaustausches in der Mikrozirkulation können zum Verständnis komplexer Vorgänge beitragen und in Zukunft die Krankheitstherapie begleiten. Reduzierte Modelle sind
in der Lage große Netzwerke von Blutgefäßen, und die Interaktion mit dem umgebenden Gewebe,
effizient zu berechnen. In dieser Arbeit wird in zwei Schritten ein voll aufgelöstes homogenisiertes
Modell reduziert und die Fehler, die durch die Reduktion eingebracht werden beschrieben. Im
ersten Schritt wird ein Modell mit reduzierter Gefäßwand entwickelt und neue Interfacebedingungen vorgeschlagen. Im zweiten Schritt wird ein Modell hergeleitet, bei dem ein eindimensionales Blutgefäßnetzerk mit einer dreidimensionalen Gewebeumgebung durch Linienquellen gekoppelt wird. Die Arbeit analysiert zunächst ein Darcy-Stokes Problem bei dem die beiden Gebiete
durch eine dünne Membran getrennt sind. Ergebnis ist eine massenkonservative DiscontinuousGalerkin-Diskretisierung zur Lösung von Darcy-Stokes Problemen mit Drucksprung am Interface.
Darüber hinaus zeigen die Ergebnisse das eine iterative Robin-Robin Gebietszerlegung bei solchen
Mehrgebiets-Kopplungsproblem eine effiziente Alternative zu direkten Lösern ist. Das zweite reduzierte Modell zeigt sich akkurat und effizient in einem großen medizinisch relevanten Parameterbereich. Die Fehler durch Parameterunsicherheit übertreffen die Fehler durch die fehlende Abbildung
von Asymmetrie im reduzierten Modell.
Acknowledgment
I thank my lovely parents for their support throughout my studies. I thank my girlfriend who had
to borrow me for a while to the Norwegians. Speaking of those, a special thanks goes to André
Massing who always took time to explain me the math and Kent-Andre Mardal for superb support
and supervision and a great stay at the Simula Research Laboratory in Oslo. Further, I thank
Rainer Helmig and Natalie Schröder for always having a friendly ear and great tips. I thank the
German Research Foundation (DFG) for the funding within the international Research Training
Group “Non-Linearities and Upscaling in Porous Media” (NUPUS).
Contents
1
Introduction
1
2
Mathematical model
4
2.1
Fundamental balance equations in continuum mechanics . . . . . . . . . . . . . .
4
2.1.1
Balance of mass . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
2.1.2
Balance of momentum . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
2.2
Modeling a blood vessel in the microcirculation . . . . . . . . . . . . . . . . . . .
7
2.3
Modeling the capillary bed . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
2.4
Modeling transmural fluid exchange . . . . . . . . . . . . . . . . . . . . . . . . .
12
2.5
Model parameter values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14
2.5.1
Viscosity of blood an interstitial fluid
. . . . . . . . . . . . . . . . . . . .
14
2.5.2
Permeabilities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14
2.5.3
Pressures and velocities . . . . . . . . . . . . . . . . . . . . . . . . . . . .
15
3
Coupling concepts
16
3.1
Interface conditions with a selective permeable membrane . . . . . . . . . . . . .
17
3.2
The coupled Darcy-Stokes system with selective permeable membrane . . . . . . .
18
3.3
A one-dimensional model for a blood vessel in the microcirculation . . . . . . . . .
19
3.4
A tissue model with source term on a line . . . . . . . . . . . . . . . . . . . . . .
23
3.5
The coupled 1D-3D model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
24
3.6
The coupled 1D-2D model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
24
4
5
The finite element method
26
4.1
The strong formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
26
4.2
Function spaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
27
4.3
Essential and natural boundary conditions . . . . . . . . . . . . . . . . . . . . . .
28
4.4
The variational formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
29
4.5
Finite element discretization . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
29
4.6
Mixed variational formulations . . . . . . . . . . . . . . . . . . . . . . . . . . . .
31
4.7
An interior penalty discontinuous Galerkin method for the Stokes problem . . . . .
32
Discretizing and solving coupled Darcy-Stokes systems
5.1
Unified mixed element formulation for the coupled Darcy-Stokes problem with selective permeable membrane . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2
5.3
39
39
Robin-Robin domain decomposition of the coupled Darcy-Stokes system with selective permeable membrane . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
41
Iterative domain decomposition of the 1D-2D reduced Darcy-Stokes problem . . .
44
5.3.1
45
Calculation of line sources . . . . . . . . . . . . . . . . . . . . . . . . . .
6
Implementation
47
7
Comparison scenarios
50
7.A The reference scenario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
52
7.B Variations in geometry . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
52
7.C Variations of model parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . .
53
8
Results and Discussion
57
9
Summary and Outlook
72
Nomenclature
In this work, lower case symbols (p) denote scalar quantities and bold lowercase symbols (u) represent vectors or vector-valued functions. Bold uppercase symbols (T) denote second-order tensors
or tensor-valued functions. Index notation of vectors or tensor operations uses Einstein notation.
The operator ∇(·) denotes the gradient of a function with respect to the position vector x. So,
∇p =
∂p
∂xi
= p,i and ∇u =
∂ui
∂xj
= ui,j is the gradient of the scalar function p and the vector function
u, respectively. The operator ∇ · (·) denotes the divergence of a function with respect to x with
∇·u =
∂ui
∂xi
= ui,i and ∇ · T = Tij,j being the divergence of the vector function u and the tensor
function T, respectively. The Laplace operator ∆(·) is equal to ∇ · ∇(·), the divergence of the
gradient of a function. The determinant of the tensor T is denoted by det T. The trace of the
tensor T is given by tr(T) = Tii .
Furthermore, the following list of symbols is used.
Symbol
Description
Unit
General symbols
Ω
A physical domain
∂Ω
The boundary of a domain Ω
Ωp
Darcy domain
Ωf
Stokes domain
Γ
Interface
(·)f
Physical quantity of the Stokes domain
(·)p
Physical quantity of the Darcy domain
t
Time
s
v
Velocity
m
s
p
Pressure
Pa
%
Density
kg
m3
µ
Dynamic viscosity (of blood if not otherwise stated)
P as
ν
Kinematic viscosity (of blood if not otherwise stated)
m2
s
Symbols introduced in Chapter 2
B
Abstract physical body
P
Material point inside a physical body
x
Current position vector of a material point
X
Reference position vector of a material point
ei
Orthonormal basis of R3
Symbol
Description
O
Origin of the coordinate system
χ
Lagrangian motion function
−1
Unit
χ
Eulerian motion function
F
Deformation gradient
u
Deformation vector
I
Second-order Identity tensor
f
Body/volume force
m
s2
t
Traction vector
Pa
T
Stress tensor
Pa
a
Acceleration field
m
s2
dv
Volume integrand of the current configuration
dV
Volume integrand of the reference configuration
M
Mass
kg
I
Momentum
kg ms
F
External forces
N
D(v)
Symmetric velocity gradient of velocity v
1
s
ϕ
Mixture
ϕα
Constituent α of the mixture ϕ
(·)α
Kinematic physical quantity of the constituent α
(·)
α
m
Non-kinematic physical quantity of the constituent α
nα
Volume fraction
%α
Partial density
φ
Porosity
%̂
Density production term
p̂ α
Momentum production term
kg
sm3
kg
s 2 m2
T
Absolute temperature
K
Re
Reynolds numer
K
Intrinsic permeability
m2
K
Scalar isotropic intrinsic permeability
m2
Q
Total flux (over the capillary wall)
A
Surface area
m3
s
2
m
π
Oncotic pressure
Pa
Lp
Filtration coefficient of the capillary wall
m
P as
Symbol
Description
Unit
KM
Intrinsic permeability of the capillary wall
m2
µi
Viscosity of the interstitial fluid
P as
dM
Thickness of the capillary wall
m
Symbols introduced in subsequent chapters
KR
Friction parameter
m2
s
p̄
Average pressure (see text for average operators)
Pa
δΓ
Dirac delta distribution on Γ
R
Capillary radius
γf , γp
Acceleration parameters
θ
Relaxation parameter
wi
Weighting parameter for Gaussian quadrature rule
xi
Integration point for Gaussian quadrature rule
p̄in
Dirichlet boundary condition at Stokes inlet
Pa
p̄out
Dirichlet boundary condition at Stokes outlet
Pa
p̄p
Dirichlet boundary condition for Darcy domain
Pa
Function spaces
Real numbers
R
L2
Square integrable functions
n
Functions with nth weak derivative
(
H div)
Functions with divergence in L2
C0
Continuous functions
Cn
Continuous functions n-times differentiable
V
Trial function space
V̂
Test function space
P1
Continuous linear functions
P2
Continuous quadratic functions
P0
Continuous constant functions
P1
Discrete space of piecewise linear polynomials / P1 -element
P2
Discrete space of piecewise quadratic polynomials / P2 -element
DG0
Discrete space of piecewise constant functions / DG0 -elements
H
m
1
Introduction
The microcirculation is the fundamental structure to provide cells with oxygen and nutrients and
to distribute pharmaceuticals. Although geometries might be available through specialized imaging
techniques, exact measurements of flow fields or distribution of a certain chemical are often too invasive and costly. Mathematical models of flow and transport processes in the microcirculation and
the surrounding tissue help to understand the complex structure and processes and can guide treatment and therapy of diseases. Possible problems of interest include oxygen transport to the brain in
case of a stroke, blood supply and growth of tumors (angiogenesis), treatment of tumors with therapeutic agents (e.g. nano particles), transport of antibiotics to biofilms on implants. Apart from
diseases, mathematical models may contribute to understanding complicated whole-body processes
like training effects on muscles, or regeneration of brain tissue during the sleep1 . Mathematical
simulation can simulate system response to a wide range of parameters. The simulation can yield
information even beyond the situation of the measurements it was calibrated with.
The microcirculation is a complicated network that features extensive branching and looping or
bypassing. A description from aterioles, or even arteries, down to thousands of tiny capillaries per
cubic centimeter tissue [Formaggia et al., 2009a] is highly complex. A fully spatially resolved model
of a network this size exceeds the limits of current computational power and time. These models
usually do not go further than investigating a single capillary, e.g. the model by Baber [2014]. This
demands reduced models which can be solved numerically at a fraction of the computational power
required for solving fully resolved models. Two main ideas have been presented in the literature
recently. The first kind are homogenized models of the microcirculation where the vessels are
described as volume fractions in homogenized tissue control volumes [Erbertseder, 2012; Ehlers
and Wagner, 2013; Chapman et al., 2008]. The second kind of models reduce the vessels to their
centerlines, and the resulting one-dimensional flow in the microcirculation is coupled with the threedimensional tissue through line sources [D’Angelo, 2007; Cattaneo and Zunino, 2013; Sun and Wu,
2013; Secomb et al., 2004]. The reduced model in this thesis is in the latter category. Up to now,
it has not been investigated which errors the model reduction introduces.
1 see
recent study on Alzheimer’s: [Ju et al., 2013]
1
The objectives of this thesis are:
◦ Which assumptions are necessary to derive a reduced one-dimensional capillary flow model
and surrounding three-dimensional tissue?
◦ In which situation do the assumptions hold, in which they do not?
◦ How much faster is the reduced model in comparison to fully resolved models?
There are several approaches on how to derive the reduced model. However, a full derivation starting
from a coupled Darcy-Stokes system with all necessary assumptions has not yet been published to the
knowledge of the author. We perform a step by step reduction which allows us to compare models
of different reduction levels. This work starts with a homogenized yet still fully spatially resolved
model of a single capillary as proposed by Baber [2014] to study transport processes over the vessel
wall in detail. In a first step, the vessel wall is reduced to a two-dimensional surface. This results
in a coupled Darcy-Stokes system which is separated by a membrane on the vessel surface. DarcyStokes systems have been extensively studied in literature, we recommend the review by Discacciati
and Quarteroni [2009]. However, the reduced vessel wall alters the well-known coupling conditions
which results in a new set of conditions introducing a large pressure jump across the Darcy-Stokes
interface. A locally conservative finite element discretization for this new problem is presented.
Furthermore, the system is solved using a direct solver and an algorithm is presented in order to
solve it iteratively following the idea of Discacciati et al. [2007]. A domain decomposition approach
is highly flexible and accounts for the different physics of the subproblem. In a second step, the
remaining three-dimensional vessel is reduced to its centerline. Quarteroni and Formaggia [2004]
list three ways of deriving a one-dimensional model from the three-dimensional (Navier-)Stokes
equations. In this work, we integrate the Stokes equations over a generic section and include the
surrounding tissue. Furthermore, is questionable, whether the assumptions of the reduction hold in
all imaginable, physical scenarios. With two models, i.e. a spatially resolved and a spatially reduced
model, we can compare different cases and quantify model errors. An optimal result is achieved if
the error introduced through the assumptions is small but the reduction in computational cost is
large. The model reduction is visualized conceptionally in Figure 1.1.
This thesis is structured as follows: In Chapter 2 the basic continuum mechanical framework is set up
to derive the necessary model equations. The generally derived balance laws of mass and momentum
are then adapted to the underlying physical problem. Medical knowledge is provided when needed
for the model assumptions. With the mathematical equations for the subsystems vessel, tissue, and
capillary wall at hand, coupling conditions are discussed in Chapter 3. Firstly, a new set of coupling
conditions for a coupled Darcy-Stokes system is introduced by reducing the vessel wall. Secondly,
the one-dimensional flow model is derived. For the second model, a different coupling strategy is
needed than in the spatially resolved model. In a mathematical excursion, Chapter 4 presents the
finite element method and the basic mathematical framework. Furthermore, the chapter explains
2
Figure 1.1 – Reducing a model. Starting from a fully spatially resolved tissue, vessel, and
vessel wall (left) the wall is reduced first (middle). Then, the vessel is reduced to its centerline
(right).
more advanced finite element formulations. With these tools at hands the mathematical problems
of Chapter 3 can be discretized and solved numerically. In Chapter 5, discretization methods for
the coupled systems are presented. Additionally to a fully coupled approach, we discuss a domain
decomposition method with the possibility to use specialized solvers in each subdomain suiting the
prevalent physics. After introducing a few comparison scenarios in Chapter 7, results from all
model are presented, discussed and compared in Chapter 8. Finally, Chapter 9 provides a summary
of findings and future plans and research suggestions.
3
2
Mathematical model
In this chapter the fundamental governing equations are derived. The balance of mass and the
balance of momentum are introduced. Based on those, Section 2.2 develops a blood model governed
by the incompressible Stokes equations. An introduction to the modeling of porous media flow is
given in Section 2.3 and leads to Darcy’s law as a model for biological tissue. Section 2.4 explains
how to model fluid flow across the vessel wall with Starling’s law. The chapter closes with remarks
on model parameters and the primary variables. For a more detailed description of the continuum
mechanical basis the interested reader is referred to [Ehlers and Bluhm, 2002; Boer, 2000]. Before
mathematical models can be set up it is important to understand the structure of the underlying
physical problem. For an extensive assertion of all relevant processes in a modeling context we refer
to the excellent introduction of [Baber, 2009]. In this work, we only give a short introduction to the
structure of capillaries and flow processes provided in place, when needed for model assumptions.
2.1
Fundamental balance equations in continuum mechanics
In order to derive the fundamental balance equations, the following picture of a deforming body B
should be kept in mind (Figure 2.1). Here, ei={1,...,n} is an orthonormal basis of Rn with origin O.
The vectors x and X denote the current and the reference position vector, respectively. Furthermore,
n is the outward pointing normal vector on ∂B, t is the traction vector, and %f represents a volume
or body force acting on the whole body B, e.g. gravity.
The motion of the deforming body can be described by a Lagrangian motion function, i.e. the
current position vector x of a material point P is depending on the reference position vector X and
the time t
x = χ(X, t).
(2.1)
The basic kinematical quantity in a large strain setting is the deformation gradient
F=
∂χ(X, t)
∂x
∂(X + u)
∂u
=
=
=I+
,
∂X
∂X
∂X
∂X
4
(2.2)
∂B
n
x = χ(X, t)
t
B
F=
∂x
∂X
=I+
∂u
∂X
X
x
u=x−X
e2
e3
%f
e1
O
Figure 2.1 – A deforming body B
where u = x − X is the displacement vector and χ the motion function of a material point P ∈ B.
In order to be unique, the motion function has be invertible, leading to the following constraint:
X = χ−1 (x, t)
if
det F 6= 0.1
(2.3)
It is then possible to describe the motion, velocity, and acceleration fields in a Lagrangian or material
setting
x = χ(X, t),
ẋ = v =
d
χ(X, t),
dt
v̇ = a =
d2
χ(X, t),
dt 2
(2.4)
or, using the inverse motion function, in an Eulerian or spatial setting
v = v(x, t),
where
2.1.1
d
dt (·)
˙ =
= (·)
∂
∂t (·)
a = a(x, t).
(2.5)
+ v ∇(·) indicates the material time derivative of a physical quantitiy.
Balance of mass
The conservation of mass is a fundamental axiom in continuum mechanics
Z
dM
% dv.
= 0 with M =
dt
B
(2.6)
The density is denoted by %, and dv and dV are infinitesimal volume elements in the current and
reference configuration, respectively. Then, using the identities dv = det F dV and
1 and
det F > 0, to rule out interpenetration of matter.
5
d
dt
det F =
det F∇·v
2
yields
Z
Z
Z
Z
d
% dv = (%̇ dv + % ḋv) = (%̇ dv + %(det˙ F)dV ) = (%̇ + %∇·v) dv = 0.
dt B
B
B
B
Applying the localization theorem dv → 0 yields the local form of the mass balance
%̇ + %∇·v = 0
∂%
+ ∇·(%v) = 0
∂t
or
(2.7)
in its general form. For lots of applications in fluid mechanics the density of the fluid can be assumed
constant, resulting in the incompressible mass balance
∇·v = 0.
2.1.2
(2.8)
Balance of momentum
In a similar manner as the mass balance one can derive the balance of momentum
Z
Z
Z
dI
= F with I =
%v dv and F =
t ds + %f dv.
dt
B
∂B
B
(2.9)
Applying Cauchy’s theorem (t(x, t, n) = T(x, t)n) and the Gauss-Green formula yields
Z
Z
%v dv =
B
Z
Tn ds +
d
dt
Z
∇·T dv +
%f dv =
B
∂B
Using the identities dv = det F dV,
Z
B
%f dv.
B
det F = det F∇·v, and the balance of mass, the global form
of the balance of momentum is obtained as
Z
Z
Z
Z
v(%̇ + %∇·v) + %v̇ dv =
%v̇ dv =
∇·T dv + %f dv.
B
B
B
B
The localization theorem dv → 0 finally yields the local form of the balance of momentum
dv
%v̇ = %
=%
dt
2 d
dt
det F =
∂ det F
∂F
∂v
+ v · ∇v
∂t
= ∇·T + %f.
·· Ḟ = det F(FT−1 ·· Ḟ) = det F(F−1 Ḟ ·· I) = det F tr( ∂X
∂x
6
∂ ẋ
)
∂X
= det F tr(∇v) = det F∇·v
(2.10)
2.2
Modeling a blood vessel in the microcirculation
The Navier-Stokes equations describe the motion of fluids. They are obtained from the general
mass balance and general momentum balance by inserting the constitutive law for Newtonian fluids
τ = 2µD(v),
(2.11)
where τ is the shear stress tensor and D(v) = 12 (∇v + ∇T v) the symmetric velocity gradient, via
the relation
T = τ + pI,
(2.12)
where T is the Cauchy stress tensor with respect to the current configuration and p the hydrostatic
pressure. Thus, the incompressible Navier-Stokes equations read
%
∂v
+ v · ∇v
∂t
= 2µ∇·D(v) − ∇p + %f,
(2.13)
∇·v = 0.
Note that for incompressible fluids ∇·v = 0 (2.8) and thus ∇·∇T v = 0 inside the domain.
Herein, blood is the considered fluid. Blood is a mixture of several components. Most prominently,
it consists of red and white blood cells, blood platelets, plasma and plasma proteins [Formaggia
et al., 2009b]. The stress behavior of the mixture is generally non-Newtonian. The blood viscosity
depends on the plasma viscosity, the pressure, haematocrit, the deformation of red blood cells
in small capillaries, the vessel diameter and the blood composition [Baber, 2009]. However, for
simplicity and the reason that this work’s primary object is the verification of a model reduction
to a one-dimensional model, blood is modeled as an incompressible Newtonian fluid with constant
viscosity. More sophisticated viscosity models are easily implemented.
Blood flow is mostly laminar, especially in the microcirculation. Reynolds numbers
Re =
vc Lc
,
ν
(2.14)
where we choose the characteristic length Lc as the vessel diameter, are very small (ca. 0.003
in capillaries according to Formaggia et al. [2009a]). For creeping flow (Re 1), the non-linear
inertial term on the left-hand side can be omitted and the linear incompressible Stokes equations
(2.15) are obtained
−2µ∇·D(v) + ∇p = 0,
(2.15)
∇·v = 0.
Although gravity can have a noticeable influence on the flow field depending on the orientation of
the vessel, we neglect the effects of gravity in this thesis. It is justifiable because we will compare
7
∂B
n
χs (Xs , t)
t
B
χf (Xf , t)
Xs
u = x − Xff
x
e2
γ
Xf
e3
e1
O
Figure 2.2 – A deforming body B being a mixture of two constituents ϕS and ϕF
model concepts rather than produce quantitative results or simulate experimental data. Gravity
effects can be easily added later.
2.3
Modeling the capillary bed
The capillary bed is a highly complex structure consisting of fibers, cells, amorphous ground substance, and interstitial fluid. To model flow processes, the system has to be simplified. To this end,
we introduce the continuum mechanical framework for the modeling of porous media. For a more
detailed description, we refer to [Ehlers and Blum, 2002]. Modeling biological tissue as a porous
medium is common in literature, see [Erbertseder, 2012] as an example.
Modeling porous media, one typically deals with a multiphase system where a mixture ϕ is constituted by several constituents α
ϕ=
[
ϕα .
(2.16)
α
A porous medium is described given at least one solid phase ϕS constituting the porous solid matrix
and one fluid phase ϕF , the pore fluid. Each constituent α of the mixture is described by an
individual motion function χα , velocity and acceleration fields, vα , aα , respectively. It posseses,
thus, also individual deformation gradients
Fα =
∂x
.
∂Xα
(2.17)
A deforming body with two constituents α ∈ {F, S} is depicted in Figure 2.2. The reduction of
8
a highly complex biological system to a simpler porous medium model is based on the concept of
volume averaging introduced by Hassanizadeh and Gray [1979]. The domain is homogenized on
the scale of a representative elementary volume (REV). The process of homogenization is shown
in Figure 2.3. The size of an REV is defined at the point where further enlargement of the control
volume does not change the value of a homogenized physical quantity, e.g. the porosity. Finding
an REV can be challenging for highly heterogeneous materials. The capillary vessel wall is e.g. so
thin that it is questionable if the REV concept is applicable [Baber, 2014].
The local composition of the mixture is described by partial volumes V α and volume fractions nα
[Markert, 2005]
Z
V =
dv =
B
X
V
α
with
V
α
Z
=
Z
dv =
B
α
α
nα dv.
(2.18)
B
The volume fractions nα are defined locally as
nα :=
dvα
.
dv
(2.19)
In a biphasic model nS , nF are called solidity and porosity, respectively. When the solid matrix is
assumed rigid, solidity and porosity become constant. The constant porosity is then, for simplicity,
denoted by φ. It follows from (2.18) that no vacant space in the domain is allowed, thus
X
nα = 1.
(2.20)
α
Furthermore, the concept of partial densities is introduced. Each constituent has a material realistic
density %αR , but can be additionally associated with a partial density %α related to the density % of
the mixture. They are defined as
%αR :=
dmα
,
dvα
%α :=
dmα
,
dv
%=
X
%α ,
(2.21)
α
and further related via the volume fractions
%α = nα %αR .
(2.22)
Note, that although the realistic density might be constant in case of material incompressibility,
the density of the mixture can still change through the change of the volume fractions. For a rigid
solid matrix, however, the density of the mixture remains constant as well.
Balance equations can be formulated for a single constituent, as long as the action of the other
constituents upon this constituent is considered. The mixture behaves like a single phase and
its balance equations are obtained by adding up the balance equations of the constituents. These
principles are known as Truesdell’s metaphysical principles [Truesdell, 1984]. Following the principles,
9
interstitial fluid ϕF
cells ϕS
dvF
dvS
microscale
REV scale
dv
Figure 2.3 – Homogenization and the concept of volume fractions
the mass balance of a constituent α is formulated analogously to the single phase mass balance (2.7)
∂%α
+ ∇·(%α vα ) = %̂α ,
∂t
(2.23)
where %̂α is a production term that accounts for interaction with the other constituents. It can
be visualized best for the two constituents ice and water, where %̂α quantifies how much ice melts
into water and visa versa. For two immiscible constituents %̂α vanishes. From the above mentioned
principles follow the constraints
X
%α = %
X
and
α
%̂α = 0.
(2.24)
α
The balance of momentum for the constituent α reads
∂vα
%α
+ vα · ∇vα = ∇·Tα + %α f α + p̂ α + %̂α vα ,
∂t
(2.25)
where p̂ α accounts for the momentum production by interaction with other constituents, e.g.
through friction, and %̂α vα is the momentum production resulting from a mass production, e.g.
ice melts in water. Again from Truesdell’s metaphysical principles follow the constraints
X
α
%α vα = %v
,
X
[Tα − %α (vα − v)] = T
α
,
X
α
%α f α = %f
and
X
(p̂ α + %̂α vα ) = 0.
α
(2.26)
The simplest multiphase model is called a biphasic model, or, when the solid phase is assumed to
be rigid, it is also referred to one-phase fluid flow in a porous medium. In this work we will use a
one-phase model to simplify the tissue domain. All solid constituents if the interstitial tissue are
unified to a single solid phase perfused by the interstitial fluid. The interstitial fluid is generally a
10
mixture too. With all the solutes united in a single fluid phase it can be modeled as an incompressible
Newtonian fluid. In order to derive the one-phase model used in this thesis we make the following
assumptions:
A1 All solid constituents are united in a single homogeneous, isotropic solid phase ϕS
A2 The fluid phase ϕF and the solid phase are immiscible
A3 Neglection of body forces f α = f = 0
A4 Solid and fluid are materially incompressible %αR = const.
A5 Isothermal process at θ = 37◦ C
A6 Creeping fluid flow Re 1
A7 Rigid solid skeleton vS = 0
Furthermore, the momentum production p̂ F is expressed by the following constitutive law,
p̂ F = p∇φ − p̂µF = p∇φ − φ2 µF K−1 (vF − vS ),
(2.27)
where p is the fluid pressure, φ denotes the porosity, µF the dynamic viscosity of the interstitial
fluid, and K the positive definite intrinsic permeability tensor of the porous medium. The production
term p̂ F can be seen as the local momentum production through friction of the interstitial fluid with
the solid matrix. The stress tensor TF for a general fluid can be expressed as
TF = TFµ − φpI = 2µF DF + λ(DF · I)I − φpI
(2.28)
with the second Lamé constant λ. The mass balance of the interstitial fluid reduces to
∇·(φvF ) = ∇·vf = 0,
(2.29)
where vf is called filter or seepage velocity. Starting from the momentum balance for the interstitial
fluid (2.25), A2, A3, and A6 yield
0 = ∇·TF + p̂ F .
(2.30)
A dimensional analysis [Ehlers et al., 1997] shows that TFµ p̂µF for small characteristic length,
e.g. pore diameter scale. This results in
0 = −∇·(φpI) + p∇φ − φ2 µF K−1 vF
0 = −φ∇p − p∇φ + p∇φ − φ2 µF K−1 vF
(2.31)
K
vf = − F ∇p
µ
Equation (2.31) is known as Darcy’s filter law and was found by Darcy [1856] as result of a sand
11
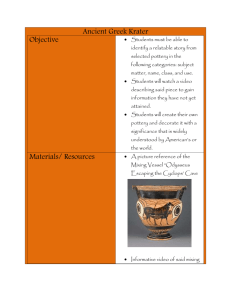
Figure 2.4 – The three different types of capillaries. Continuous capillary (left), fenestrated
capillary (middle), discontinuous capillary (right). Figure from Baber [2014].
column experiment. Darcy’s law can be reformulated by substituting the velocity in the mass balance
(2.29) with the momentum balance (2.31)
K
− ∇·
∇p
µF
= 0.
(2.32)
In a first approach, the porous medium is often assumed to be homogenous and isotropic, so the
permeability can be substituted by a scalar K. In reality, however, porous materials are often highly
heterogenous and anisotropic.
2.4
Modeling transmural fluid exchange
The interface between Stokes and Darcy domain is given by the selective permeable vessel wall.
The vessel wall can in fact itself be modeled as an additional Darcy domain, e.g. [Quarteroni and
Formaggia, 2004]. However, it is questionable whether an REV really exists because of its small
dimensions [Baber, 2014]. Section 2.4 shows the three types of capillaries and their capillary walls.
The capillary wall consists of two layers. The inner one is formed by endothelial cells (pink), the
outer one is a basement membrane or basal lamina (green) that consists of fibers like collagen. The
endothelial cells are connected by tight junctions. Water can pass through pores where the tight
junctions are defective. Few larger pores also permit the exchange of larger molecules like proteins.
The number of pores and thickness of the two layers differs for different types of capillaries, so does
the amount of fluid exchange. Larger pores are more numerous in discontinuous capillaries and the
basement membrane is reduced to a minimum. They occur in liver, spleen and bone marrow and
have the highest exchange rates. Continuous capillaries have the lowest fluid exchange and can be
12
found in muscles, skin, lungs, and the central nervous system [Formaggia et al., 2009a]. The fluid
movement across the capillary wall is determined by Starling’s law
Q = Lp A [(pf − pp ) − σ(πf − πp )] ,
(2.33)
where Q is the flux across the vessel wall with the filtration coefficient Lp and the surface area A.
Further, pf and pp denote the hydrostatic pressure in the vessel and the interstitium, respectively.
The oncotic or colloid osmotic pressure π is an osmotic pressure exerted by proteins3 . It usually
causes an osmotic drag of water inside the blood vessel and is therefore working against hydraulic
pressure gradient. The reflection coefficient for plasma proteins σM says what fraction of proteins
is retained by vessel through reflection at the capillary wall. It is close to 1 for macromolecules and
close to 0 for micromolecules [Jain, 1987]. The oncotic pressure difference remains nearly constant
along the capillary. In all the following models we therefore join the oncotic pressure and the fluid
pressure to one new primary variable. From now on, p shall denote the effective pressure
pαe := pα − σπα ,
α = {p, f }.
(2.34)
For the physiological informations in this paragraph [Hall, 2010] was consulted.
Starling’s law can be also interpreted as a Darcy-type law where the tangential velocity component
is neglected
vM · n =
KM
[pf − pp ] ,
µi dM
(2.35)
where vM is the seepage velocity, n the normal vector on the surface of the vessel wall pointing
towards the interstitium, and the filtration coefficient of the capillary wall in now expressed as
Lp =
KM
,
µi dM
(2.36)
with the intrinsic permeability of the wall KM , its thickness dM and the fluid viscosity µi . The
fluid viscosity is that of water for very small pores but higher for bigger pores when loaded with
heavy solutes. It is simply assumed to be equal to the viscosity of the interstitial fluid in this work.
The flow then corresponds to a tube model, where water flow paths through the membrane are
simplified as cylindrical pores. The effective pressure gradient must be interpreted discretized over
the full vessel wall
pf − pp
.
dM
∇p =
(2.37)
With this interpretation it is possible to integrate Starling’s law in a new set of Darcy-Stokes interface
conditions (see Chapter 3). Literature values are available for both the intrinsic permeability of the
wall KM and the filtration coefficient Lp .
3 http://en.wikipedia.org/wiki/Oncotic˙pressure
13
2.5
Model parameter values
Each of the above presented models relies on empirical parameters that need to be determined by
experiments. Ischinger [2013] has aggregated literature values for all necessary parameters in this
work. We refer to his work for literature references. This section presents the key parameters and
provides an estimated range within which the parameters can fall. We also calculated an average
from the literature values obtained by Ischinger [2013]. Estimated averages are provided when
literature values are given only for combinations of model parameters. It is sometimes not specified
at which exact location or under which conditions a parameter was measured. Parameters can
change even along a single capillary. However, we regard the range of parameters as legitimate
range for testing our numerical models. The section starts out with the parameter of the blood
model, the blood viscosity µ. It proceeds with the parameters of the tissue model, the viscosity
of the interstitial fluid µi , the intrinsic permeability K, and the parameter of the transmural flow
model, the filtration coefficient of the vessel wall Lp or its intrinsic permeability KM . The section
concludes with pressures and velocities that are necessary to find meaningful boundary condition
and to check numerical results to consistency.
2.5.1
Viscosity of blood an interstitial fluid
As mentioned above blood is a mixture of various components. However, it is legitimate to describe
it with a constant viscosity parameter µ if the flow conditions and geometry of the vessel are
invariant during the simulation. Large particles in the blood, in particular red blood cells, can not
pass the vessel wall. The interstitial fluid therefore has equal properties as blood plasma and can be
modeled as a Newtonian fluid with constant viscosity µi . The viscosity has the unit P as. According
to the literature consulted by Ischinger [2013] the blood viscosity can be estimated ranging from
2 − 3.5 · 10−3 P as where a value of µ = 2.1 · 10−3 P as was conducted for small vessels. The
viscosity of the interstitial fluid can be estimated ranging from 1.1 − 2 · 10−3 P as with an average
of µi = 1.3 · 10−3 P as.
2.5.2
Permeabilities
The intrinsic permeability K of the solid matrix quantifies the flow resistance these obstacles pose
for the fluid. It is highly anisotropic in the interstitium and can be e.g. obtained by diffusion tensor
imaging [Ehlers and Wagner, 2013]. Due to the lack of patient specific data and the general focus
on model reduction of this work, the permeability is assumed isotropic and replaced by a scalar value.
Some literature values are given only for the hydraulic conductivity
K
µi .
The intrinsic permeability
has the unit m . Ischinger [2013] found literature values in the range of 4.4 · 10−18 − 3 · 10−17 m2
2
14
for the intrinsic permeability and 2.3 · 10−15 − 6.6 · 10−15
estimated average of K = 6.5 · 10
−18
m
P as
for the hydraulic conductivity with an
2
m .
The intrinsic permeability KM of the vessel wall contains several resistance mechanism due to the
complex nature of the transmural flow. Often, literature values are only available for the effective
parameter, the filtration coefficient Lp . The filtration coefficient includes the thickness of the
capillary wall and thus has the unit
2.5 · 10
−12
−9
− 1.5 · 10
m
P as
m
P as .
Ischinger [2013] found literature values in the range of
for the filtration coefficient. The value is highly dependent on the type
of capillary. The highest literature values were obtained for fenestrated capillaries that have a high
amount of large pores. Intrinsic permeability values ranged from 2.4 · 10−20 − 9.7 · 10−18 m2 . The
estimated average is Lp = 3.0 · 10−11
2.5.3
m
P as .
Pressures and velocities
Primary variables in all models are velocity field v and effective pressure field p. The primary
variables are the solution of the numerical simulation. However, reasonable boundary values have to
be provided beforehand to solve the numerical model. The capillary blood velocity in our model will
be determined by pressure, geometry, and the above presented model parameters. For a reference
the mean blood velocity in capillaries is estimated being |vf | < 10−3
m
s
[Quarteroni and Formaggia,
2004]. As introduced above, the effective pressure consists of parts form the hydrostatical pressure
and the oncotic pressure. The oncotic pressure is nearly constant along the vessel wall. On the
contrary the hydrostatic pressure exhibits large gradients from aterial to venous end of a capillary. At
the arterial end one finds net filtration of fluid into the tissue, at the venous end fluid gets reabsorbed.
We do not intent to vary the pressure values in the scope of this work. Therefore, the mean values
obtained by Baber [2014] are used to construct a comparable model test. She estimated the
hydrostatic pressure at the arterial end of a capillary to p̄in = 4000 P a and the hydrostatic pressure
at p̄out = 2000 P a with respect to the interstitial hydrostatic pressure p̄i = 0 P a. The interstitial
pressure was estimated to be close to atmospheric pressure. She further used πf = 3600 P a for
the oncotic pressure in the vessel and πp = 933 P a for the oncotic pressure in the interstitium.
In Chapter 2, the governing equations for modeling blood flow in small vessel, one-phase flow
in biological tissue and flow across a selective permeable membrane were derived. Furthermore,
model assumptions based on given geometry, processes, and composition of the real problem were
presented and a values for parameters were obtained from the literature. However, modeling flow
in one of the mentioned domains alone is not enough to solve the full flow field. The vessel is
connected to the tissue and the two are separated by the vessel wall. The equations need to be
coupled in a physical sensible manner in order to calculate the flow in the entire domain. The
following Chapter 3 presents these coupling mechanisms.
15
3
Coupling concepts
Modeling transport processes in blood vessels and tissue constitutes a multi-domain problem. One
domain is the blood vessel with a pipe-like flow governed by the Navier-Stokes equations. The other
domain is the connected tissue surrounding the vessel which can be modeled as porous medium
governed by Darcy’s law. Both domains influence the behavior of the respective other domain, i.e.
they are coupled. Considering the very different nature of the models in both domains, the coupled
problem is also a multi-physics problem.
To realize the coupling of the tissue and vessel domains, this work presents a new set of interface
conditions coupling Darcy and Stokes flow separated by a thin membrane. The new interface
conditions allow the description of the vessel wall without spatially resolving it. The new interface
conditions are presented in Section 3.1.
The subsequent sections present the two fundamental coupling concepts in two models. According
to Helmig et al. [2013] the first model is classified as a multi-compartment model, the second model
as a multi-dimensional model.
The first model is derived by looking at two spatially resolved domains, a free-flow domain and a
porous domain, the blood vessel and the surrounding tissue, respectively. The domains are coupled
at a common interface with appropriate interface conditions (see Section 3.1). The vessel wall
model is herein reduced to an interface condition. All domains are illustrated in Figure 3.3. The
first model is introduced in Section 3.2.
In the second model, the vessel domain is reduced to a one-dimensional domain placed inside a
spatially fully resolved tissue domain. The two domains are coupled through (line) source terms.
The second model can be obtained from the first model making further assumptions. A model
reduction, starting from the spatially resolved first model, is presented in Section 3.3. The model
problem for three and two dimensions is presented in Sections 3.5 and 3.6.
16
vessel wall M
vessel wall M
Ωf
Ωp
n
n
τ
pp
Ωf
Ωp
vM · τ ≈ 0
n
τ
τ
pp
pM,f
pM,p
pf
pf
Figure 3.1 – Reduction of the capillary wall to a line interface between the capillary and the
surrounding tissue
3.1
Interface conditions with a selective permeable membrane
We start by recalling that Starling’s law (2.35), describing fluid flow across the capillary wall can
be interpreted as Darcy’s law assuming the flow in tangential direction τ is negligible. Thus,
the capillary wall M is a Darcy domain where flow only occurs in direction of n. Further, let
Γf = ∂Ωf ∩∂M denote the interface of the capillary wall with the vessel domain and Γp = ∂Ωp ∩∂M
the its interface with the tissue domain. Figure 3.1 shows a part of the system tissue–capillary wall–
capillary explaining the aforementioned symbols. The interface Γp requires interface conditions that
couple a Darcy domain with another Darcy domain. These can be trivially formulated as the
continuity of the pressure across the interface
pM,p = pp ,
(3.1)
and the continuity of the normal velocity (mass conservation)
vM · n = vp · n.
(3.2)
The interface Γf requires interface condition that couple a Darcy domain with a Stokes domain.
There is a vast number of literature on Darcy-Stokes coupling that all use the interface conditions
comprehensively investigated e.g. in [Discacciati and Quarteroni, 2009]. Mass conserves across the
interface. This interface condition can be written as the local mass balance as above,
vf · n = vM · n
17
(3.3)
For simplicity n = nf denotes the outward pointing normal on ∂Ωf . Another interface condition is
obtained by balancing the normal stresses at the interface,
− 2µD(vf )n · n + pf = pM,f .
(3.4)
A third interface condition is required for the tangential stresses. An interface condition introduced
by Beavers and Joseph [1967] as an experimental result, simplified by Saffman [1971] and also
justified later mathematically by Mikelic and Jäger [2000] is the Beavers-Joseph-Saffman condition
µ
− 2µD(vf )n · τ = α √ vf · τ
K
(3.5)
We assume in this work that the slip velocity vf · τ |Γf is negligible. Thus,
vf · τ = 0.
(3.6)
The tangential free-flow velocity gets in fact smaller the lower the permeability of the porous is. Such
a no-slip condition is justifiable for the very low permeability, KM ≈ 10−20 m2 (see Section 2.5),
of the vessel wall.
In a second step, we reduce the capillary wall by one dimension (dM → 0). The interfaces Γf and
Γp now fall on one single interface Γ. The new interface has modified interface conditions that are
vf · n = (vM · n) = vp · n,
(3.7)
the mass balance across the interface,
− 2µD(vf )n · n + pf =
µi dM
v f · n + pp
KM
(3.8)
the balance of normal stresses, and the interface condition for the tangential velocity (3.6) that
stays untouched. The three interface conditions (3.7), (3.8) and (3.6) couple the Darcy domain
with the Stokes domain under consideration that the interface between them is actually constituted
of a selective permeable membrane.
3.2
The coupled Darcy-Stokes system with selective permeable membrane
The domain Ω is split into a free-flow domain Ωf representing the blood vessel and a porous
domain Ωp representing the surrounding tissue separated by a selective permeable membrane Γ. It
is illustrated by Figure 3.2. The Stokes equations govern the free-flow domain Ωf and Darcy’s law
18
Γ
nf
Ωp
nf
Ωp
Ωf
Figure 3.2 – The domain Ω consisting of the free-flow domain Ωf (vessel) and the porous
domain Ωp (tissue).
the porous domain Ωp .
Problem 3.1 (Coupled Darcy-Stokes problem)
Find (v, p) such that
−2µ∇·D(vf ) + ∇pf = 0
in Ωf
(3.9)
−∇·vf = 0
µi
vp + ∇pp = 0
K
−∇·vp = 0
in Ωf
(3.10)
in Ωp
(3.11)
in Ωp
(3.12)
on Γ
(3.13)
on Γ
(3.14)
on Γ
(3.15)
The applied interface conditions on Γ = ∂Ωp ∩ ∂Ωf are
vf · n = vp · n
−2µD(vf )n · n + pf =
µ i dM
vf · n + pp
KM
vf · τ = 0
The system is closed by appropriate boundary conditions on ∂Ωf and ∂Ωp . For the applied boundary
conditions see Chapter 8. The coupling concept is equivalently applicable for 3D-3D coupling and
2D-2D coupling.
3.3
A one-dimensional model for a blood vessel in the microcirculation
The diameter of a small vessel is usually small in comparison to the characteristic length of the
vessel. The flow in microcirculation is laminar with Reynolds numbers smaller than 1 resulting in
rather simple velocity fields. This motivates the reduction of the vessel to a one-dimensional object
19
in order to reduce computational costs. This section presents the reduction of the Stokes equations
from three dimensions to one.
nr
S
Ωp
z
−
S+
Ωf
nz +
nz −
M
ω
dz
Figure 3.3 – A part P of a blood vessel in the microcirculation surrounded by tissue Ωp
To derive the one-dimensional Stokes equations we start from the incompressible full three-dimensional
Stokes equations (2.15) in cylindrical coordinates (r, θ, z) and subsequently reduce the system, making the following assumptions:
A1 Axial symmetry. The velocity profile is symmetric with respect to the axis
∂v
∂θ
=0
A2 Rigid arterial wall. The displacement of the arterial wall can be neglected in the microcirculation. Thus, R = const.
A3 Constant pressure. The pressure is assumed constant over a cross-section. p = p(z)
A4 Negligible radial velocity. Inside the domain the radial velocity can be neglected in comparison
to the axial velocity.
This follows the derivation presented in [Quarteroni and Formaggia, 2004] for the full Navier-Stokes
equations. We look at a part P of a capillary vessel Ωf surrounded by a tissue compartment Ωp .
The vessel is depicted in Figure 3.3. Let S denote an axial section of a vessel with the measure
A = 2πR2 . The axial component of the velocity field can be written as
v · nz = vz (r, z) = v̄ (z)s(r )
(3.16)
where
s(r ) =
h
r γ i
1
(2 + γ) 1 −
γ
R
(3.17)
is a velocity profile of a power law type, yielding a parabolic profile for γ = 2. The mean velocity is
given by
1
v̄ =
A
Z
1
v ds =
A
S
(A4)
20
Z
vz nz ds = v̄ (z).
S
(3.18)
Note that therefore
Z
s ds = A.
(3.19)
S
Let ω denote the wall of the part of the capillary vessel P, and S + and S − the outflow and the
inflow cross section, respectively, so that ∂P = ω ∪ S + ∪ S − (see Figure 3.3). We will integrate the
Stokes equations over P = {(r, θ, z) : r ∈ [0, R), θ ∈ [0, 2π), z ∈ (z −
dz
2 ,z
dz
2 )}
+
and then go to
the limit dz → 0. An interface condition, modeling the behavior of the wall as a selective permeable
membrane, is introduced as a Robin-type boundary condition on the vessel wall ω (see Section 2.4)
v · nr = vr (r, z) =
KM
(p − pi )
µi dM
The mass balance can then be reduced as follows
Z
Z
Z
Z
Z
0=
∇·v dv =
v·n ds =
v·n ds−
vz ds+
P
∂P
S−
ω
on
ω.
(3.20)
Z
vz ds =
S+
Z
v·n ds−
Z
v̄ s ds+
S−
ω
v̄ s ds.
S+
Note that the second fundamental theorem of calculus holds for
z+
Z
dz
2
dz
dz
∂ v̄
− v̄ z −
dz = A v̄ z +
∂z
2
2
A
z−
where we used
R
S
dz
2
s ds = A. Applying the interface condition and recalling that ds = R dθ dz in
cylindrical coordinates yields
Z
Z
v · n ds =
ω
ω
KM
(p − pi )R dθ dz
µi dM
where
1
p̄i =
2πR
dz→0
≈ 2πR
KM
(p − p̄i ),
µi dM
(3.21)
Z
pi (z , θ)R dθ
(3.22)
θ
is the interstitial pressure averaged over the surface of the vessel wall. As the vessel fluid pressure is
assumed constant over a cross-section such an average operator is obsolete. The one-dimensional
mass balance then reads
−A
∂ v̄
KM
= 2πR
(p − p̄i ).
∂z
µi dM
(3.23)
For the momentum balance, we follow the same procedure. The integration of the pressure term
is straightforward
1
ρ
For the viscous term
Z
Z
ν∆v dv =
P
∂P
Z
dz→0
∇p dv =
P
Z
ν∇vn ds =
S−
A ∂p
nz .
ρ ∂z
ν∇vn−
z ds +
21
Z
S+
ν∇vn+
z ds +
Z
ν∇vnr ds
ω
we neglect the change of v with respect to z in comparison to the change in radial direction,
∇vnz =
∂v
≈0
∂z
and we split ∇vnr in its radial and its axial part, so that
Z
Z
Z
ν∇vnr ds =
ν(nr ⊗ nr )∇vnr ds +
ν(nz ⊗ nz )∇vnr ds
ω
ω
ω
Z
Z
∂vz
∂vr
nr ds +
nz ds.
ν
=
ν
∂r
∂r
ω
ω
Recalling, that vz (r, z) = v̄ (z)s(r ) we get
∂vz
∂s ν
nz ds = 2πRν v̄
nz = −KR v̄ nz .
∂r
∂r r =R
ω
Z
where KR = −2πRν
∂s ∂r r =R
is a friction parameter. The given power type law (3.17) for the axial
velocity profile results in KR (γ) = 2πν(2 + γ). For the radial part of the velocity gradient, we get
Z
∂vr
ν
nr ds =
∂r
ω
Z
∂vr
ν
∂r
z
Z
2π
nr dθ
dz = 0.
0
This yields the one-dimensional momentum balance in a three-dimensional world
A ∂p
nz + KR v̄ nz = 0
ρ ∂z
(3.24)
where nz is a three-dimensional vector in axial direction of the reduced vessel. Finally, the full
one-dimensional Stokes equations read
A ∂p
nz + KR v̄ nz = 0
ρ ∂z
∂ v̄
KM
−A
= 2πR
(p − p̄i )
∂z
µi dM
(3.25)
Note that the velocity in the mass balance can be eliminated by inserting the momentum balance,
resulting in
A ∂p
nz + KR v̄ nz = 0
ρ ∂z
2πR4 ∂ 2 p
KM
= 2πR
(p − p̄i )
2
µ(2 + γ) ∂z
µi dM
(3.26)
where γ is the parameter for the power type axial velocity profile.
The above derived model assumed that the vessel is surrounded by a three-dimensional tissue
matrix. However, when looking at a two-dimensional model, the reduction to one dimension slightly
differs. The measure for the cross-section S is then A2D = 2R. Integrals over the vessel wall ω are
22
calculated as
R
ω
R dθ dz
dz→0
= 2πR in three dimensions, but as
R
ω,2D
2 dz
dz→0
= 2 in two dimensions.
The reduced one-dimensional model then reads
2R ∂p
nz + KR,2D v̄ nz = 0
ρ ∂z
2R3 ∂ 2 p
KM
=2
(p − p̄i,2D )
2
µ(2 + γ) ∂z
µi dM
with KR,2D =
1
R 2ν(2 + γ)
(3.27)
and p̄i,2D = 12 (pi |R + pi |−R ). Consequently, nz is now a two-dimensional
vector in direction of the reduced vessel. To this end, pi |R denotes and evaluation of the interstitial
pressure at distance R from the vessel on one side of the vessel and pi |−R the evaluation at distance
R on the opposite side. Note that the 2D formulation is then equivalent to the 3D formulation,
except for the calculation of the source term average operator.
3.4
A tissue model with source term on a line
The Darcy domain Ωp , the tissue, and the one-dimensional free-flow domain Γ, the vessel, are
coupled via interface conditions on the vessel wall. The interaction can be modeled by including a
source term f on a line in the mass balance (3.28).
− ∇·
K
∇pp = f δΓ
µi
in Ω,
(3.28)
where δΓ is the Dirac delta distribution with the following properties
δΓ =
Z
1
on Γ
0 elsewhere
Z
f δΓ dv = f ds.
Ω
(3.29)
Γ
It restricts the source term to a line representing the blood vessel. A comparison with (3.26) yields
f = 2πR
KM
(pf − p̄p )
µ i dM
(3.30)
for a three-dimensional model and
f =2
1
KM
pf − (pp |R + pp |−R )
µ i dM
2
for a two dimensional model.
23
(3.31)
3.5
The coupled 1D-3D model
Γ
nz
Ω
Figure 3.4 – A 1D blood vessel Γ in the microcirculation surrounded by tissue Ωp
The 1D-3D model features a one-dimensional vessel model inside a three-dimensional tissue model.
The governing equations and coupling source term were introduced in the previous sections. The
porous tissue domain Ωp is traversed by a line, the vessel domain Γ. The vessel domain has a null
measure in R3 and we subsequently write Ωp as Ω. The domain is illustrated in Figure 3.4. In order
to better identify the mathematical nature of the problem the coefficients in (3.26) are aggregated
into one coefficient
C=
R3 µi dM
µ(2 + γ)KM
(3.32)
The problem then reads
Problem 3.2 (1D-3D coupled problem)
Find (pf , pp ) such that
∂ 2 pf
− pf = −p̄p
∂z 2
K
KM
−∇· ∇pp = (2πR
(pf − p̄p ))δΓ
µi
µi dM
C
on Γ
(3.33)
in Ω
The same model was also obtained by Cattaneo and Zunino [2013] using an immersed boundary
method. The coupling is non-trivial since the formulation is a mixed integral differential formulation
due to the pressure average operator.
3.6
The coupled 1D-2D model
The 1D-2D model features a one-dimensional vessel model inside a two-dimensional tissue model.
The governing equations and coupling source term were introduced in the previous sections. The
domain is illustrated in Figure 3.5. The problem reads in analogy to Problem 3.2
24
Γ
nz
Ω
Figure 3.5 – A 1D blood vessel Γ in the microcirculation surrounded by tissue Ωp
Problem 3.3 (1D-2D coupled problem)
Find (pf , pp ) such that
∂ 2 pf
− pf = −p̄p,2D
∂z 2
K
KM
−∇· ∇pp = (2
(pf − p̄p,2D ))δΓ
µi
µi dM
C
on Γ
(3.34)
in Ω
where the averaging operator is now the 2D averaging operator presented at the end of Section 3.3.
In Chapter 3 we have presented two conceptionally different coupled models describing the flow field
in and around a blood vessel in the microcirculation. In the first model, the vessel is fully spatially
resolved. In the second model, the vessel is reduced to its centerline. Both models were derived
for three and two dimensions. The following investigations are conducted with the two-dimensional
model for sake of simplicity of implementation and solution. In order to solve the problems posed
in this section using computers, we need to introduce numerical methods. Chapter 4 presents the
finite element method.
25
4
The finite element method
In this chapter, the numerical method used within this work is presented: the finite element method
(FEM). The finite element method and its variations are versatile numerical methods to solve
partial differential equations. This chapter provides the basic mathematical tools of FEM and
introduces some numerical applications. Subsequent sections also introduce mixed finite element
methods, discontinuous Galerkin methods, and stabilized FEM methods. For more comprehensive
introductions to the finite element method, we refer to [Larson and Bengzon, 2013; Brenner and
Scott, 2008; Logg et al., 2012a]. The finite element method is explained here by means of treating
the Poisson equation numerically.
− ∆u = f
(4.1)
The Poisson equation is an elliptic partial differential equation (PDE), i.e. information propagates
equally in all directions. It can describe e.g. heat conduction, electrical conduction, diffusive
transport or flow in porous media. In order to obtain a determined system to solve numerically
we have to restrict it to a finite domain Ω and equip it with Dirichlet and Neumann boundary
conditions. A Dirichlet boundary condition is of the form u = u0 and fixes the solution function u
to a value u0 on the Dirichlet part of the boundary ∂ΩD . A Neumann condition boundary is of the
form ∇u · n = g and fixes the normal derivative
∂u
∂n
= ∇u · n of the solution function u to a value g
on the Neumann part of the boundary ∂ΩN .
4.1
The strong formulation
The Poisson problem (4.1) together with the boundary conditions is called strong formulation of
the Poisson problem. Let the considered domain Ω ⊂ Rn , n ∈ {2, 3} be an open and bounded
domain and let Ω̄ denote its closure.
Problem 4.1 (Strong formulation) Find u ∈ C 2 (Ω̄) such that
− ∆u = f
in Ω,
u = u0
on ∂ΩD ,
26
∇u · n = g
on ∂ΩN ,
(4.2)
where C k (Ω̄) = {u ∈ Ω̄ : u and its derivatives up to kth order are continuous}, ∂ΩD and ∂ΩN
denote the boundary parts of Ω with Dirichlet and Neumann boundary conditions, respectively.
Here, u ∈ C 2 (Ω̄) is called the strong or classical solution of the problem. The restriction for u ∈ C 2
is strong. In a numerical scheme we have to deal with discrete non-differentiable (in a classical sense)
functions or even discontinuous functions. In what follows, we describe an alternative formulation
of the problem called the variational or weak formulation. It is less restrictive towards u. The weak
formulation employs function spaces making use of weak derivatives of the form
Z
1
Z
1
f v 0 dx
gv dx = −
0
∀v
(4.3)
0
where v is a test function satisfying v (0) = v (1) = 0 and g = f 0 is called the weak derivative of
f . In order to continue the explanation a short introduction to finite element function spaces is
required.
4.2
Function spaces
Let us define two function spaces commonly encountered in a finite element setting. The function
space
Z
2
L (Ω) = {u ∈ Ω :
1
2
< ∞}
u dv
2
(4.4)
Ω
is the space of functions where the squared function is bounded in a Lebesgue sense, or measurable,
1
R
and kukL2 = Ω u 2 dv 2 its norm. In other words, a function u is in L2 (Ω) if kukL2 is smaller than
infinity. The function space
H1 (Ω) = {u ∈ L2 (Ω) : ∇u ∈ L2 (Ω)n }
(4.5)
is called Sobolev space (of first order). With the scalar product
Z
Z
∇u · ∇v dv +
(u, v )H1 =
Ω
uv dv
(4.6)
Ω
and the so induced norm
kukH1 =
p
(u, u)H1
(4.7)
H1 (Ω) is a Hilbert space. Or, in short, the space of L2 functions whose gradients are also L2
functions. Functions in L2 are only defined up to null sets. This enables weak differentiation of
functions that would not be differentiable in a classical sense. As an example we can look at the
27
function f (x) = |x| on Ω = [−2, 2] shown in Figure 4.1.
Z
2
f (x) = |x| ∈ L (Ω)
because
1
2
|x| dv
<∞
2
(4.8)
Ω
Note that, e.g. f (x) ∈
/ L2 (R), because the space of real numbers R is not bounded as a domain.
The absolute function |x| is not differentiable in a classical sense because of its cusp at x = 0.
However, in a weak sense we can derive f (x) = |x| and get the signum function.
1 if x > 0
sgn(x) = 0 if x = 0
−1 if x < 0
(4.9)
We can choose the value at x = 0 arbitrarily because it is a null set and will not change the value
of the integral. f 0 (x) = sgn(x) is an L2 (Ω) function and f (x) = |x| is therefore also a member of
the Hilbert space H1 (Ω). The signum function itself can not be derived further with respect to x
in a weak sense, f 0 (x) = sgn(x) ∈
/ H1 (Ω).
f (x)
f (x)
1
x
1
−1
−1
x
−1
1
1
Figure 4.1 – The functions f (x) = |x| and f 0 (x) = sgn(x)
4.3
Essential and natural boundary conditions
The finite element theory distinguishes between essential and natural boundary conditions. Natural
boundary conditions are enforced in a weak sense in the variational formulation, essential boundary
conditions have to be included into the function space of solution and test function. In the following
example the Dirichlet boundary condition will be an essential boundary condition and the Neumann
boundary condition will be a natural boundary condition. This is not always the case, see e.g.
Section 4.6 about mixed variational formulations. For the following example the Dirichlet boundary
condition is incorporated in the function space. Choosing the solution or trial function u ∈ V and
28
the test function v ∈ V̂, where
V(Ω̄) = {u ∈ H1 (Ω̄) : u = u0 on ∂ΩD }
and
V̂(Ω̄) = {u ∈ H1 (Ω̄) : u = 0 on ∂ΩD }
(4.10)
are spaces of functions satisfying the Dirichlet boundary condition and a shifted Dirichlet boundary
condition, respectively, it is now possible to formulate the variational formulation.
4.4
The variational formulation
Multiplying the strong form (4.2) with the test function v ∈ V̂ and integration over Ω, leads to
Z
Z
−∆uv dv =
f v dv.
Ω
(4.11)
Ω
Integration by parts of the left-hand side integral yields
Z
Z
Z
∇u · ∇v dv =
f v dv +
Ω
Ω
gv ds,
(4.12)
∂ΩN
exploiting the fact that the test function vanishes on the Dirichlet boundary. The Neumann boundary
condition is enforced weakly in the variational formulation. Now, the variational problem can be
defined as
Problem 4.2 (Variational formulation) Find u ∈ V(Ω̄) such that
Z
Z
∇u · ∇v dv =
Ω
Z
f v dv +
Ω
gv ds
∀v ∈ V̂(Ω̄)
(4.13)
∂ΩN
The formulation in Problem 4.2 is called variational formulation of the Poisson problem. Herein,
u ∈ V(Ω̄) is called the weak solution of the Poisson problem. The solution of the strong formulation
is also a solution of the variational formulation. However, the variational integral formulation makes
sense under less restrictive conditions. The weak solution of the Poisson problem exists, is unique,
and changes continuously with the initial conditions. The problem is thus called well-posed (after
Hadamard).
4.5
Finite element discretization
After stating the mathematical foundation, we can now discretize the variational formulation. We
split the domain Ω into smaller units, e.g. triangles in two dimension, or tetrahedrons in three
29
degree of freedom
node
P2
P1
Figure 4.2 – The P1 and the P2 Lagrange element
dimension. We call T a mesh (or triangulation, in case of triangles) of Ω [Larson and Bengzon,
2013]. The mesh is (usually) a set of triangles {τ }, such that
Ω=
[
τ.
(4.14)
τ ∈T
Depending on the type of the mesh and the dimension, triangles could be substituted by lines,
squares, cubes, tetrahedrons, or even objects with round edges.
Further, we have to choose a finite element type. A finite element is defined by an element domain
τ ∈ Ω, a discrete function space Vh (Ω), and a basis φ of the dual space Vh0 [Brenner and Scott,
2008]. The dual space is the space of bounded linear functionals on Vh . φ is also called basis
function or ansatz function. A common choice is the P1 Lagrange element [Logg et al., 2012a;
Larson and Bengzon, 2013]
τ ∈T
Vh (T ) = {v ∈ C 0 (Ω) : v |τ ∈ P1 , ∀τ ∈ T }
P1 (τ, Vh , φ) =
1 for i = j
φ
=
φ
(v
)
=
i , j = 1, 2, 3
j i
j
0 for i 6= j
(4.15)
where C 0 is the space of continuous functions in Ω, and vi the nodal values of the function v . The
basis functions are 1 on the node i and 0 elsewhere. The basis function are piecewise continuous
linear functions. The degrees of freedom of the P1 element are situated on the nodes of the element.
The next higher order Pk element is the P2 element. It has piecewise continuous quadratic basis
functions. Three additional degrees of freedom are situated in the middle of each element edge.
The P1 and the P2 element and it’s degrees of freedom are visualized in Figure 4.2. Since the the
function v is continuous no jump over the interface of two triangles is possible. Additional types
of elements used in this work will be discussed in Section 4.6. A so called discontinuous Galerkin
30
method allowing for jumps on element interfaces will be discussed in Section 4.7.
With the previous definitions, we can approximate the function u in Problem 4.2 as
uh =
N
X
Uj φj ,
(4.16)
j=1
where N is the number of degrees of freedom. We can now write the discrete formulation of the
Poisson problem.
Problem 4.3 (Discrete formulation)
Find uh ∈ Vh (Ω̄) = {uh ∈ C 0 (Ω) : uh |τ ∈ P1 , ∀τ ∈ T
Z
Z
and
Z
∇uh · ∇v dv =
f v dv +
Ω
uh = u0 on ∂ΩD } such that
gv ds
Ω
∀v ∈ Vˆh (Ω̄)
(4.17)
g∇φ̂i ds
(4.18)
∂ΩN
or, using (4.16)
N
X
j=1
Z
Z
∇φj · ∇φ̂i dv =
Uj
Ω
Z
f ∇φ̂i dv +
Ω
∂ΩN
This corresponds to solving the linear system
AU = b
(4.19)
with the primary variable vector u and
Z
A=
ZΩ
b=
∇φj · ∇φ̂i dv
Z
f ∇φ̂i dv +
Ω
(4.20)
g∇φ̂i ds
∂ΩN
Note that the basis functions equal 1 on the node i and 0 on all other nodes. Thus, A has a sparse
structure.
4.6
Mixed variational formulations
Variational problems can also be formulated for more than one unknown. An example used in this
work is Darcy’s law (3.28) with separate mass and momentum balance
−∇·vf = 0,
µF K−1 vf + ∇p = 0.
31
(4.21)
The unknowns are the velocity field vf and pressure field p. The mixed variational formulation
is obtained by multiplying the first equation with a test function q and the second equation with
another test function w. After integration over the domain Ω the first and second equation are
added.
Problem 4.4 (Mixed variational formulation)
Find (vf , p) ∈ V such that
Z
µF K−1 vf · w dv −
Ω
Z
Z
p∇·w dv −
Ω
Z
pw · n dv = 0
q∇·vf dv +
Ω
∀(w, q) ∈ V̂
(4.22)
∂Ω
Note that in this formulation a Dirichlet boundary condition is a natural boundary condition. The
Neumann boundary condition is essential and has to be enforced in the function space. The formulation holds for all test functions, which means it particularly holds if one of the test functions
is zero. In that case we retrieve one of the original equations in variational form. The difficulty
in mixed methods lies in finding suitable function spaces and finite elements. Not all combinations
of finite elements produce stable schemes. A natural choice of function spaces for the Darcy case
would be
V = H(div) × L2 ,
(4.23)
where H(div) is the space of L2 function that have a divergence in L2 . A stable discretization
is a mixed formulation with BDM1 (Brezzi-Douglas-Marini elements) for the velocity and DG0
(Discontinuous Galerkin elements) for the pressure. The BDM element is suggested by Fortin and
Brezzi [1991] as a H(div)-conforming element in the sense that the discrete function space is a
subset of H(div). The degrees of freedom of this element are normal components evaluated on
the edges of the element. The mixed Darcy formulation required the continuity of the normal
component of the velocity. It has no restrictions for the tangential component. Therefore the
BDM1 constitutes a natural element for the Darcy velocity. The DG-element of 0th order is an
element with just one degree of freedom per element. It therefore has piecewise constant basis
functions which are naturally discontinuous across element facets. The degrees of freedom of both
the BDM1 and the DG0 are visualized in Figure 4.3. Note that this combination is e.g. not stable
for the Stokes equations as the normal and tangential component must be continuous in the Stokes
case. A stabilization technique will be presented subsequently.
4.7
An interior penalty discontinuous Galerkin method for the Stokes
problem
The spatially resolved coupled blood-tissue flow model features a pressure jump across the vessel
wall. In order to resolve the jump, a discontinuous solution is mandatory. When coupling Darcy and
32
DOF
node
BDM1
DG0
Figure 4.3 – The BDM1 and the DG0 element with degrees of freedom (DOFs)
Stokes flow, common finite elements in both domains have the advantage of simpler implementation.
The following Stokes method can be discretized with a mixed BDM1 × DG0 -element. A DarcyStokes coupled problem can thus be treated with a single mixed element used in the whole domain
and the scheme is additionally locally mass conservative. The method is based on the interior penalty
method presented in [Rivière, 2008] for the Stokes equation. Rivière and Yotov [2005] extended the
method to a Darcy-Stokes coupled problem with simple interface. The essential boundary conditions
are weakly enforced using Nitsche’s method [Nitsche, 1971].
Some interior penalty methods can be in fact interpreted as a Nitsche type method weakly enforcing
the continuity of the solution over interior facets [Arnold, 1982; Massing, 2012] . Massing et al.
[2014] introduce a Nitsche method for the Stokes problem for interface conditions on overlapping
meshes. Following this, we start by introducing the basics of Nitsche’s method and, after introducing
helpful DG notation, end up with the desired scheme. Nitsche’s method allows to include boundary
or interface conditions within the variational formulation of the problem instead of including the
conditions in the solution’s function space. For a simple Poisson problem −∆u = f in Ω; u =
u0 on ∂Ω the variational formulation is obtained by multiplying with a test function v and integration
by parts.
Z
Z
∇u · ∇v dv −
Ω
Z
(∇u · n)v ds =
∂Ω
f v dv
(4.24)
Ω
The boundary condition is now weakly enforced by penalizing (u − u0 ), yielding
Z
∇u · ∇v dv −
Ω
Z
Z
(∇u · n)v ds +
∂Ω
∂Ω
α
(u − u0 )v ds =
h
Z
f v dv,
(4.25)
Ω
where h is the local mesh size and α > 0 a penalty parameter. Rendering (4.25) symmetric as the
problem originally was is desirable to e.g. design efficient solvers. A consistent symmetrization can
33
be achieved by adding the term −
Z
R
∂Ω (∇v
· n)(u − u0 ) ds, giving
Z
Z
∇u · ∇v dv −
Ω
|
(∇u · n)v ds −
∂Ω
{z
}|
Consistency
Z
Z
(∇v · n)u ds
∂Ω
{z
}
Symmetry
+
|
Ω
−
|
Penalty
Z
Z
f v dv
α
uv ds =
∂Ω h
{z
}
(∇v · n)u0 ds
∂Ω
{z
}
Symmetry
+
|
α
u0 v ds .
∂Ω h
{z
}
(4.26)
Penalty
The method is consistent in the sense that the original solution to the problem is also a solution
to the altered problem and vice versa. The method can be applied analogously in a DG scheme to
weakly enforce continuity of the solution across interior facets. A discontinuous Galerkin method
features function spaces of discontinuous piecewise polynomials. Integrals of interior facets no
longer vanish. It comes in handy to define the jump and average operators
JvK = v+ − v−
{v} =
1 +
(v + v− ),
2
(4.27)
respectively, and to introduce the following identity
Jv · wK = JvK · {w} + {v} · JwK,
(4.28)
easily proven with the definitions in (4.27). We use ne to denote a fixed normal vector of a facet of
two neighboring cells E + and E − , not affected by jump and average operators Jv · ne K = JvK · ne .
Two neighboring cells are depicted in Figure 4.4. The choice of ne is arbitrary if consistent [Rivière,
2008]. A discontinuous formulation cannot be formulated in global integrals. Instead, we look at
n−
E−
E+
n+
Γ∂Ω
Figure 4.4 – Notation for discontinuous Galerkin techniques
one element E of a triangulation E and sum over all elements, where e and Γ, Γ∂Ω here denote the
set of facets, interior facets, and exterior facets, respectively. For the Poisson problem where u is
34
taken as piecewise linear on each element E we get
Z
Z
Z
∇u · ∇v dv −
(∇u · nE )v ds =
∇f · ∇v dv.
E
∂E
(4.29)
E
Then, summing over all elements, switching to the fixed normal vector ne between two neighboring
elements, and adding penalty and symmetry term as above yields
XZ
E∈E
∇u · ∇v dv −
E
XZ
e∈Γ
−
e
{∇u} · ne Jv K ds
X Z
e∈Γ∂Ω
∇u · nv ds
−
e
e∈Γ
−
e
−
f v dv
E
{∇v } · ne JuK ds
X Z
∇v · nu ds
e
e∈Γ∂Ω
XZ
E∈E
XZ
X Z
∇v · nu0 ds
e
e∈Γ∂Ω
XZ β
JuKJv K ds
+
h
e∈Γ e
X Z α
uv ds =
+
h
e∈Γ∂Ω e
X Z α
u0 v ds,
+
e h
e∈Γ∂Ω
(4.30)
where β is a second penalty parameter. The penalty parameters have to be chosen large enough
to ensure stability but small enough to not worsen the condition number and emphasize numerical
errors. Lower bound estimates can be obtained theoretically, e.g. [Epshteyn and Rivière, 2007].
The penalty parameter is dependent on the model parameters and nature of the problem and on
the approximation degree of the numerical method.
We now look at the Stokes problem for a tube shaped domain Ω and its wall ∂Ωω , inlet ∂Ωin , and
outlet ∂Ωout .
Problem 4.5 (Stokes)
Find (u, p) such that
−2µ∇·D(v) + ∇p = 0
in Ω
∇·v = 0
in Ω
v=0
on ∂Ωω
p = p̄in
and
∇v n = 0
on ∂Ωin
p = p̄out
and
∇v n = 0
on ∂Ωout
(4.31)
with D = 12 (∇v +∇T v) denoting the symmetric velocity gradient as usual. We now have one vectorvalued and one scalar-valued equation and therefore choose a mixed variational formulation. Again,
the variational formulation for an element E is obtained by multiplying with two test functions
(w, q) and integration by parts.
Z
2µD(v) ·· D(w) dv −
E
Z
Z
p∇·w dv −
ZE
−
q∇·v dv
Z
pnE · w ds = 0
2µD(v)nE · w ds +
E
∂E
∂E
35
(4.32)
In this divergence formulation the pressure Dirichlet boundary condition is natural, while the velocity
Dirichlet condition is essential. The essential boundary condition will be enforced with Nitsche’s
method. In fact, when using BDM1 -elements the degrees of freedom are normal components and
do not allow to set Dirichlet conditions strongly for the tangential velocity component. The mixed
DG method is obtained by summing over all elements, symmetrization and penalization.
XZ
E∈E
2µD(v) ·· D(w) dv −
E
−
XZ
−
2µD(v)ne · w ds −
e
X
e
e∈Γ
q∇·v dv
E
2µ{D(w)}ne · JvK ds +
XZ
e∈Γ
β
2µ JvK · JwK ds
h
e
{q}JvK · ne ds
e
XZ
X
T
µ∇ vne · w ds −
X
XZ
e∈Γω
e∈Γ∂Ω in
−
XZ
e∈Γ
XZ
e∈Γω
−
{p}JwK · ne ds +
e
e∈Γ
XZ
E∈E
2µ{D(v)}ne · JwK ds −
e
XZ
p∇·w dv −
E
E∈E
e∈Γ
+
XZ
XZ
2µD(w)ne · v ds +
e
e∈Γω
α
2µ v · w ds
h
e
(4.33)
T
µ∇ vne · w ds =
e∈Γ∂Ω out
p̄in (ne · w) ds −
e∈Γ∂Ω in
X
p̄out (ne · w) ds
e∈Γ∂Ω out
Note that choosing BDMk -elements leads to JvK · ne = JwK · ne = 0. This method is similar
to the one presented in [Rivière, 2008]. They show pressure and velocity convergence for mixed
DGk × DGk elements. The mesh convergence of the velocity is shown by Wang et al. [2009] for
H(div)-conforming elements. However, the convergence of the pressure was not investigated. We
tested convergence of pressure and velocity for a domain Ω = [−0.2, 0.2] × [−1, 1], where we chose
µ = 1, α = 10, and the boundary conditions so that the exact solution is vx = 0, vy = −2 + 50x 2 ,
p = 100(1 + y ). The error is calculated as
Z
e = ||u − ue ||L2 =
(u − ue )2 dv
1/2
,
Ω
where ue is the respective exact solution. The rate of convergence is calculated as the experimental
order of convergence
r=
ln e k+1 − ln e k
,
k+1
k
ln hmax
− ln hmax
where hmax is the maximal element diameter of the mesh calculated as two times the circumradius1
and k the refinement step. The results of the grid convergence test is shown in Table 4.1.
The above presented method is locally mass conservative. There are no constraints for functions
concerning jumps over facets, so selecting an interior element E we choose q equals to 1 on E, and
1 http://www.wolframalpha.com/input/?i=circumradius+triangle
36
k
hmax
||p k − pe ||L2
Rate r
||vk − ve ||L2
Rate r
1
0.141421
2.35427
0.978062
0.0736681
1.89229
2
0.0707107
1.18615
0.988995
0.0195418
1.91448
3
0.0353553
0.595311
0.994571
0.00526346
1.89248
4
0.0176777
0.298207
0.997327
0.00148557
1.82500
5
0.00883883
0.14924
0.998677
0.000456279
1.70303
Table 4.1 – Convergence rates and errors for the BDM1 × DG0 mixed Stokes discretization for
k mesh refinements.
0 elsewhere. The discretization of the mass balance then reduces to
Z
XZ 1
−
JvK · ne ds = 0.
∇·v dv +
E
e 2
(4.34)
e∈∂E
With BDM1 -elements the normal velocity component is continuous, thus JvK · ne = 0. The method
therefore exactly satisfies the mass balance for each element
Z
−
∇·v dv = 0.
(4.35)
E
Locally conservative schemes are important, e.g. for coupled flow and transport problems in porous
media. Newton solvers are observed to stop converging after a few time steps if the scheme is not
locally conservative [Rivière, 2008].
In order to determine large enough penalty parameters, we set α = β and calculated the L2 -norm
of the pressure and velocity error to the exact solution for various penalty parameters. The results
are shown in Figure 4.5.
The penalty term shifts the eigenvalues of the the stiffness matrix so that the matrix is positive
definite which is a requirement for the stability. The penalty parameter has to be large enough to
assure positive definiteness. Positive definite matrices can, however, also occur for small penalty
parameters (local minima in Figure 4.5). Figure 4.5 shows that for ca. α > 2 the numerical method
is stable and the error in comparison with the exact solution minimal. For values α 2 the error
slightly increases due to numerical errors introduced by larger and larger condition numbers.
37
12
8
||v − ve ||L2
||p − pe ||L2
10
6
4
2
0
0
0.5
1
1.5
2
2.5
3
50
45
40
35
30
25
20
15
10
5
0
0
penalty parameter α
0.5
1
1.5
2
2.5
3
penalty parameter α
Figure 4.5 – Error over penalty parameter α = β for the Stokes BDM1 −DG0 -method. Pressure
(left) and velocity (right).
In this chapter, several discretization techniques based on the finite element method were introduced. With those discretization techniques at hand, we can now discretize the problems presented
in Chapter 3 subsequently in Chapter 5. In particular, the introduced discontinuous Galerkin discretization of the Stokes problem and the mixed variational formulation for the Darcy problem can
be used in the coupled Darcy-Stokes system. The estimated penalty term also provides a first
estimation for the penalty terms of the coupled problem.
38
5
Discretizing and solving coupled Darcy-Stokes
systems
This chapter presents formulations and solution algorithms for the introduced models. Two general
concepts are the fully coupled method and iterative domain decomposition methods. Both methods
decompose the domain into parts that use different physical models, namely a free-flow and a porous
region.
A fully coupled strategy solving all equations in a single linear system at once is presented in Section 5.1 for Problem 3.1. This method uses a direct solver for the Darcy-Stokes system with
membrane since the systems generally have rather bad condition numbers. Iterative domain decomposition methods solve two separate system sequentially with suitable boundary conditions and
source terms for each individual problem. The boundary conditions get updated every iteration step.
A big advantage of iterative methods is the fact that well-known discretization methods, solvers and
preconditioners are already available for the subproblems. Hanging nodes on the interface are possible. Considering time-dependent problems, different time step size can be used for each domain.
The two systems can even be solved by different specialized code libraries, if a few data transfer
mechanisms are available. Disadvantages are that for ill-conditioned problems the iterative solver is
slow in comparison to direct solvers. Iterative algorithm are presented in Sections 5.2 and 5.3 for
the Problems 3.1 and 3.3, respectively.
5.1
Unified mixed element formulation for the coupled Darcy-Stokes
problem with selective permeable membrane
The aim is a formulation that can be discretized with one type of finite element. This allows easy
implementation. Because of the interface pressure jump, the described method has to allow for
discontinuities. Starting point is Problem 3.1. The scheme features the mixed and DG techniques
introduced in Section 4.6 and Section 4.7. The discrete mixed variational formulation of (3.9) can
39
be obtained as
a(v, w) + b(p, w) + b(q, v) + c(v, w) + d(v, w) = L(w, q).
(5.1)
Here, Ωp denotes the porous domain, Ωf the free-flow domain. The symbols Γp , Γf denote interior
facets and Γ = Γp ∩ Γf . The elements Ep , Ef denote elements of the triangulations Ep and Ef , and
e element facets. The outer boundaries are written as ∂Ωp and ∂Ωf . Then, the symmetric bilinear
form a(v, w) is defined as
a(v, w) :=
XZ
Ef
Ef ∈Ef
−
XZ
e∈Γf
e
X Z
2µ∇v ·· ∇w dv +
Ep
Ep ∈Ep
2µ{D(v)}ne · JwK ds −
XZ
e∈Γf
µ
v · w dv
K
2µ{D(w)}ne · JvK ds +
e
XZ
β
2µ JvK · JwK ds.
h
e
e∈Γf
(5.2)
It includes the integrals over interior facets in the free-flow domain and penalizes velocity jumps.
b(p, w) and b(q, v) are defined as
XZ
b(p, w) := −
b(q, v) := −
XZ
Ef ∈Ef
p∇·w dv −
Ef
Ef ∈Ef
X Z
q∇·v dv −
Ef
p∇·w dv +
Ep
Ep ∈Ep
X Z
q∇·v dv +
(5.3)
XZ
e∈Γf
{p}JwK · ne ds
e
e∈Γf
Ep
Ep ∈Ep
XZ
{q}JvK · ne ds
e
where the last term is consistent but vanishes when using BDM1 -elements. The bilinear form
c(v, w) is the form of the interface conditions and is defined as
XZ
XZ
1
α
c(v, w) :=
(vf · nf )(wf · nf ) ds +
2µ (vf · τ )(wf · τ ) ds
L
h
p
e∈Γ e
e∈Γ e
Z
XZ
X
(2µD(wf )nf · τ )(vf · τ ) ds
(2µD(vf )nf · τ )(wf · τ ) ds −
−
e∈Γ
e
e∈Γ
(5.4)
e
All the quantities are restricted to the free-flow domain. The bilinear form d(v, w) consists of the
weakly enforced boundary conditions at inlet and outlet of the free-flow domain and is defined by
d(v, w) = −
X
e∈Γ∂Ωf
µ∇T vnf · w ds −
X
e∈Γ∂Ωf
in
µ∇T vnf · w ds
(5.5)
X
(5.6)
out
The right-hand side linear form reads
L(w, q) := −
X
e∈Γ∂Ωf
p̄in (nf · w) ds +
in
X
e∈Γ∂Ωf
p̄out (nf · w) ds −
out
p̄D (np · w) ds
e∈Γ∂Ωp D
Form c(v, w) requires some additional explanation. Let us look at the integral over one interface
facet e ∈ Γ. Contributions from the free-flow and porous domain are marked as (·)f and (·)p ,
40
respectively.
Z
Z
−
Z
2µD(vf )nf · wf ds +
e∈Γ
pf nf · wf ds +
e∈Γ
pp np · wp ds
(5.7)
e∈Γ
Considering that np = −nf , and performing a split in tangential and normal component v = (v ·
nf )nf + (v · τ )τ yields
Z
−
Z
(2µD(vf )nf · τ )(wf · τ ) ds −
e∈Γ
Z
(2µD(vf )nf · nf )(wf · nf ) ds +
e∈Γ
e∈Γ
We now analyze the pressure jump term and see that
Z
Z
Z
Z
(pf wf − pp wp )nf ds =
JpwKnf ds =
(JpK{w} + {p}JwK)nf ds =
e∈Γ
e∈Γ
e∈Γ
JpwKnf ds
(5.8)
(pf − pp )(w · nf ) ds
e∈Γ
(5.9)
where we used JwK · nf = 0 and {w} · nf = wf · nf for BDM-elements. Recalling interface condition
(3.8) resulting from the normal stress balance, we can then write
Z
Z
−
(2µD(vf )nf · τ )(wf · τ ) ds +
e∈Γ
e∈Γ
1
(vf · nf )(wf · nf ) ds
Lp
(5.10)
Interface condition (3.6) is enforced weakly using Nitsche’s method
Z
Z
1
α
(vf · nf )(wf · nf ) ds +
µ (vf · τ )(wf · τ ) ds
L
e∈Γ p
e∈Γ h
Z
Z
−
(2µD(vf )nf · τ )(wf · τ ) ds −
(2µD(wf )nf · τ )(vf · τ ) ds
e∈Γ
(5.11)
e∈Γ
and summing over all interface facets we have form (5.4). All three interface conditions (3.7), (3.8),
and (3.6) are thus satisfied. The continuity of normal velocities is incorporated in the function space.
The normal stress balance can be seen as a natural boundary condition. The no-slip condition on
the vessel wall, as an essential boundary condition, is enforced weakly using Nitsche’s method. The
scheme is locally mass conservative as the mass balance is explicitly satisfied for all elements. The
system is solved using a direct solver.
5.2
Robin-Robin domain decomposition of the coupled Darcy-Stokes
system with selective permeable membrane
The domain Ω is decomposed into two subdomains Ωf and Ωp . On each subdomain independent
problems are solved. Each process transfers information from the other domain by boundary conditions on the original interface Γ. The solving process is iterative and serial. The easiest method
for decomposing Darcy and Stokes domain is a Dirichlet-Neumann domain decomposition method.
In each iteration step, a subproblems in Darcy and Stokes domain are solved with boundary con-
41
ditions calculated from the solution of the respective other domain. Such an algorithm for the
Darcy-Stokes coupled problem was presented and mathematically analysed in [Discacciati, 2005].
However, Discacciati [2005] finds that the algorithm is impractically slow for high ratios of fluid
viscosity to permeability as present in our case. A more advanced Robin-Robin domain decomposition algorithm for a Darcy-Stokes coupled system with simple interface (without considering a
membrane on the interface) has been developed and thoroughly investigated by Discacciati et al.
[2007]. A modified algorithm with the new interface conditions is presented here. The boundary
conditions for the subproblem are of Robin type. This, third possibility of a boundary condition is
of the form au + b∇u · n = au0 + bg and is a linear combination of Dirichlet and Neumann boundary conditions. For a → 0 the Neumann boundary condition is obtained, for b → 0 the Dirichlet
boundary condition.
The Darcy system in its variational form can be written as
Z
Z
K
K
∇pp · ∇ϕ dv +
∇pp · nf ϕ ds = 0
Γ µi
Ωp µi
(5.12)
the Stokes system as
Z
2µD(vf ) ·· D(w) dv −
Ωf
Z
Z
pf ∇·w dv −
q∇·vf dv+
Z
Z
+ [−2µD + pf I] nf · w ds −
µ∇T vf nf · w ds
Γ
∂Ωf in
Z
=−
p0 nf · w ds.
Ωf
Ωf
(5.13)
∂Ωf in
The Darcy velocity is calculated in a decoupled step, solving the variational form
Z
Z
K
vf · ϕ dv = −
∇pp · ϕ dv
µ
Ωp
Ωp i
(5.14)
The Darcy pressure is discretized with P2 -elements the velocity with P31 -elements. The Stokes is
solved in the mixed formulation using P32 -P1 -elements (Taylor-Hood elements) for the pair (vf , pf ).
ALGORITHM 1 —
1. Solve the Darcy problem
Z
Z
Z
K
γp ∇pp k+1 · ∇ϕ dv + pp k+1 ϕ ds = Λk ϕ ds
µi
Ωp
Γ
Γ
42
(5.15)
which corresponds to imposing the Robin boundary condition
−γp
K
µi dM k
∇pp k+1 · nf + pp k+1 = γp vf k · nf − 2µDk n · nf + pf k −
vf · nf
µi
KM
(5.16)
:= Λk
2. Solve the Stokes problem
Z
2µD(vf
k+1
) ·· D(w) dv −
Z
pf
k+1
Z
q∇·vf k+1 dv
∇·w dv −
Ωf
Ωf
Ωf
Z
µi dM
k+1
)(vf
· nf )(nf · w) ds −
µ∇T vf k+1 nf · w ds
+ (γf +
KM
∂Ωf in
Γ
Z
Z γf k γp + γf k+1
k+1
Λ −
pp
(nf · w) ds
=−
p0 nf · w ds +
γp
∂Ωf in
Γ γp
(5.17)
Z
which corresponds to imposing the Robin boundary condition
K
µi dM k+1
∇pp k+1 · nf − pp k+1 −
vf
· nf
µi
KM
γf k γp + γf k+1 µi dM k+1
Λ −
pp
−
vf
· nf
=
γp
γp
KM
(5.18)
γf k γp + γf k+1
Λ +
pp
γp
γp
(5.19)
K
∇pp k+1 · ϕ dv
µi
(5.20)
2µDk+1 n · nf − pf k+1 + γf vf k+1 · nf = −γf
3. Upadte Λ
Λk+1 = (γp + γf ) vf k+1 · nf −
(4.) Calculate the Darcy velocity field by solving
Z
vf k+1 · ϕ dv = −
Z
Ωp
Ωp
If the algorithm converges, the original interface conditions are retained. Let vf ∗ , vp ∗ , pf ∗ , and pp ∗
be the functions the primary variables vf , vp , pf , and pp converged to. Then, the Robin boundary
conditions imposed in step 1 and 2 read
µi dM ∗
K
∇pp ∗ · nf + pp ∗ = γp vf ∗ · nf − 2µD(vf ∗ )n · nf + pf ∗ −
vf · nf
µi
KM
µi dM ∗
K
2µD(vf ∗ )n · nf − pf ∗ + γf vf ∗ · nf = −γf ∇pp ∗ · nf − pp ∗ −
vf · nf
µi
KM
−γp
(5.21)
(5.22)
Inserting (5.22) in (5.21) yields
− (γp + γf )
K
∇pp ∗ · nf = (γp + γf )vf ∗ · nf .
µi
(5.23)
Equation (5.23) is interface condition (3.7) for γp + γf 6= 0. With (5.23) inserted in (5.22) we
43
obtain
2µD(vf ∗ )n · nf − pf ∗ = −pp ∗ −
µi dM ∗
vf · nf ,
KM
(5.24)
which is interface condition (3.8). The third interface condition (3.6) is an essential Dirichlet
boundary condition for the Stokes domain on Γ. Discacciati et al. [2007] proves that the algorithm
converges for γf > γp > 0, where γf , γp are chosen to be large enough to guarantee good
convergence properties and small enough to keep the condition numbers of the subsystems low.
5.3
Iterative domain decomposition of the 1D-2D reduced DarcyStokes problem
This section presents an iterative algorithm for solving the 1D-2D coupled problem (Problem 3.3).
The domain as shown in Figure 3.5 is a porous tissue domain that is traversed by a vessel line. The
leaky vessel model is formulated in one dimension. The mesh consists of intervals but lives in a
two-dimensional world. Each node is associated with coordinates in two dimensions. The coupling is
realized with the mutual source term. We can eliminate the velocity in both domains, thus, solving
a problem with the effective pressure as only primary variable. The velocity field can be calculated
in a second decoupled step. The 2D Darcy system in its variational form can be written as
Z
Z
KM
K
∇pp · ∇ϕ dv = (2
(p̄p,2D − pf ))ϕ ds
(5.25)
µi dM
Γ
Ωp µi
the corresponding 1D Stokes or Hagen-Poiseuille system as
Z
C
Γ
∂pf ∂q
dz +
∂z ∂z
Z
Z
pf q dz =
Γ
p̄p,2D q dz
(5.26)
Γ
Both pressures are discretized with P1 -elements.
ALGORITHM 2 —
1. Assemble the following Darcy system
Z
Ωp
K
∇pp k+1 · ∇ϕ dv = 0
µi
(5.27)
2. Calculate point sources for every integration point x (e.g. Gaussian quadrature with n = 1,
associated interval Ix = [a, b])
fP (x) = (b − a)f ((a + b)/2),
f (z) = 2
44
KM
1
(pf − (pp |R + pp |−R ))
µi dM
2
(5.28)
3. Assemble point sources into right hand side vector of Darcy system and solve for pp k+1
4. Solve 1D Stokes system
∂pf k+1 ∂q
dz +
C
∂z ∂z
Γ
Z
Z
pf
k+1
Z
q dz =
Γ
Γ
p̄p k+1
,2D q dz
(5.29)
5. Set
pp k = (1 − θ)pp k+1 + θpp k
(5.30)
The relaxation parameter θ is used to accelerate convergence. The velocities can be obtained
in a post processing step from the pressure solutions. The calculation of point sources for every
integration point is a geometrically flexible method of realizing the coupling.
5.3.1
Calculation of line sources
Ep
integration point
line integral over this line is approximated
by quadrature rule
intersection point
Ef
Ep
Ef
Figure 5.1 – Discrete approximation of a line source integral
A source term on a line is easily written down mathematically but the implementation is more
complex. Formally the source term is an integral over the entire vessel
Z
KM
f (Ωp ) = 2
(pf − p̄p,2D ) dz .
Γ µi dM
(5.31)
The discretized domain is triangulated. In a similar manner the source term gets discretized.
Gaussian quadrature rules are a method of numerical integration. They only work well if the
integrand is a polynomial. At element facets the pressure solution can have bends and the integral
45
needs to be split up. The discrete form of integral (5.31) can be written as
X XZ
fh (Ωp ) =
Ep ∈Ep Ef ∈Ef
2
Γ∩Ep ∩Ef
1
KM
(pf − (pp |R + pp |−R )) dz
µi dM
2
(5.32)
The remaining inner integral (the integration domain in marked red in Figure 5.1) is approximated
by a quadrature rule. The discrete integral is illustrated in Figure 5.1. For the subsequent numerical
examples a single integration point was used, corresponding to a Gaussian quadrature rule of degree
n = 1. Thus, the integral over one (red) part of the facet Γ ∈ [a, b] is numerically approximated by
Z
a
b
n=1
b−a X
b−a
a+b
f (z) dz ≈
wi f
xi +
,
2
2
2
(5.33)
i=1
where f (z) = 2 µKi dMM (pf − 12 (pp |R + pp |−R )). For n = 1 the weighting function w1 = 2 and the only
integration point xi = 0 [Abramowitz and Stegun, 1972]. Implementation-wise every addend of the
discretized sum was applied to the right-hand side vector of the linear system as a point source.
The point source affects the right-hand side of all degrees of freedom of the element the point falls
in. This leads to a ”smearing” of the point source over the element that gets less the smaller the
element is or the higher the polynomial degree of the basis functions of the element is.
The intersection points and integration points are calculated in a preprocessing step after mesh
generation. The intersection detection algorithm was implemented as a brute-force algorithm where
all edges of a cell of the two-dimensional domain are tested for an intersection with all interval cells of
the one-dimensional domain. If an intersection is found, the intersection points are calculated. Note
that significantly faster algorithms exist, e.g. a bounding box hierarchy method1 . For an efficient
intersection detection implementation for three-dimensional meshes see e.g. [Massing et al., 2013].
The herein employed meshes where relatively small so that fast implementation was more important
than algorithm speed. For larger simulations, the intersection detection algorithm can consume a
majority of the whole CPU time [Cattaneo and Zunino, 2013].
For the most part of this thesis a simplified line source algorithm was used that gives good results if
the one-dimensional elements are around the same magnitude or the one-dimensional grid is small
enough. Then it is enough to use one integration point in the middle of each one-dimensional
element, regardless of the two-dimensional grid. Intersection do not have to be calculated at all.
This only works for solution without large bends over element edges. Such solutions occur in our
examples so that a difference between the above presented method and the simplified method was
not visible.
1 http://en.wikipedia.org/wiki/Bounding˙volume˙hierarchy
46
In this chapter the solution strategies for the Problems 3.1 and 3.3 were presented. The spatially
resolved model can be solved in a unified approach in a single linear system, or, decomposed in two
subsystems that communicate via appropriate interface conditions. For the spatially reduced second
model and iterative solver is presented accounting for the different geometrical and mathematical
nature of the subsystems. The solvers can now be implemented. Remarks on the implementation
are found in Chapter 6. Testing scenarios and results are presented subsequently.
47
6
Implementation
The implementation was accomplished in FEniCS (http://fenicsproject.org/ ). The FEniCS project
[Logg et al., 2012a] is a collection of open source software to solve differential equations. Its heart
is the C++ (and Python) library DOLFIN [Logg et al., 2012b]. The form compiler FFC compiles
variational forms, finite elements, and functionals written in UFL (Unified Form Language) to basic
C++–code. UFL allows to write variational forms in a close to paper notation. The following
presents how to solve a Poisson problem with discontinuous elements in FEniCS using DOLFIN’s
C++–interface.
We solve a simple poisson problem ∇u = f in Ω ; u = 0 on ∂Ω using FEniCS. We choose f =
f (x, y ) = 500 ∗ exp −((x − 0.5)2 + (y − 0.5)2 )/0.02 . First we obtain the variational formulation
by multiplying with a test function v and integration by parts.
Z
Z
Z
∇u · ∇v dv +
∇u · nv ds =
f v dv
Ω
∂Ω
(6.1)
Ω
The domain is dicretized using DG1 -elements. Therefore we penalize the jump of u with Nitsche’s
method. The essential boundary condition u = 0 on ∂Ω is also enforced with Nitsche’s method as
introduced in Section 4.7. We obtain the discrete variational problem as
XZ
E∈E
E
XZ α
JuKJv K ds
h
e∈Γ e
e∈Γ e
e∈Γ e
X Z
X Z
X Z β
XZ
+
∇une v ds +
∇v ne u ds +
uv ds =
f v dv
e
e
e h
E
∇u · ∇v dv +
XZ
{∇u} · Jv Kne ds +
e∈Γ∂Ω
XZ
e∈Γ∂Ω
{∇v } · JuKne ds +
e∈Γ∂Ω
(6.2)
E∈E
This can be easily translated into the following UFL code. This code and the following code snippets
in this section are taken and slightly altered from the undocumented dg-poisson-demo included in
the newest DOLFIN 1.4 release.
48
UFL code
# Elements
element = FiniteElement ( ” DG ” , triangle , 1 )
# Trial and test functions
u = TrialFunction ( element )
v = TestFunction ( element )
f = Coefficient ( element )
# Normal component , cell size and right - hand side
h = 2 . 0 * triangle . circumradius
h˙avg = ( h ( ’+ ’) + h ( ’ - ’) ) / 2
n = element . cell () . n
# Parameters
alpha = 4 . 0
beta = 8 . 0
# Bilinear form and Linear Form
a = inner ( grad ( u ) , grad ( v ) ) * dx “
- inner ( jump (u , n ) , avg ( grad ( v ) ) ) * dS “
- inner ( avg ( grad ( u ) ) , jump (v , n ) ) * dS “
+ ( alpha / h˙avg ) * jump ( u ) * jump ( v ) * dS “
- inner ( u *n , grad ( v ) ) * ds - inner ( grad ( u ) , v * n ) * ds “
+ ( beta / h ) * u * v * ds
L = f * v * dx
FFC compiles UFL code to C++ code. To do this we call
Bash code
ffc -l dolfin Poisson . ufl
from a terminal. This generates the header file Poisson.h with all the classes we need to solve the
Poisson problem in our C++ code. The corresponding DOLFIN C++ code looks like this. The
code is explained via comments inside the code.
C++ code
# include ¡ dolfin . h ¿
# include ” Poisson . h ”
using namespace dolfin ;
int main ()
–
// Source term
49
class Source : public Expression
–
public :
Source () : Expression () –˝
void eval ( Array ¡ double ¿ & values , const Array ¡ double ¿ & x ) const
–
const double dx = x [ 0 ] - 0 . 5 ;
const double dy = x [ 1 ] - 0 . 5 ;
values [ 0 ] = 500 . 0 * exp ( - ( dx * dx + dy * dy ) / 0 . 02 ) ;
˝
˝;
// Create mesh
UnitSquareMesh mesh ( 24 , 24 ) ;
// Create functions
Source f ;
// Create function space
Poisson : : FunctionSpace V ( mesh ) ;
// Define variational problem
Poisson : : BilinearForm a (V , V ) ;
Poisson : : LinearForm L ( V ) ;
L.f = f;
// Compute solution
Function u ( V ) ;
solve ( a = = L , u ) ;
// Save solution in VTK format
File file ( ” poisson . pvd ” ) ;
file ¡ ¡ u ;
// Plot solution
plot ( u ) ;
interactive () ;
return 0 ;
˝
In this chapter an exemplary implementation of a DG Poisson problem was given. It can be seen
that the UFL code is very close to the mathematical description and notation of the problem. The
C++–Interface to DOLFIN provides comprehensible classes for the implementation of the solving
process. Further implementation code is attached in the appendix.
50
7
Comparison scenarios
In this chapter numerical scenarios are developed to compare the aforementioned models and solution strategies in efficiency, generality and robustness. To this end, we construct a reference case
(Section 7.A). The reference case is developed in analogy to the one presented in [Baber, 2014] in
order to allow for comparison. The subsequently presented cases are alterations of the reference
case in order to test specific behavior of the models. The focus of the comparison scenarios is
testing the effect of the model reduction to a one-dimensional vessel. Therefore, we compare the
behavior of the two models presented in Chapter 3 to changes of parameters and geometry. In
order to simplify reference [2D-FC] shall refer to the spatially resolved model with direct solver
(Section 5.1), [2D-IT] to the spatially resolved model with iterative solver (Section 5.2), and [1D]
to the reduced model with the one-dimensional vessel geometry (Section 5.3).
In order to compare model results, meaningful indicators have to be define. We calculate the total
net flux over the interface. For the [2D-FC] and the [2D-IT] model this refers to calculating the
functional
Z
vf · n dv.
Q2D =
(7.1)
Γ
For the [1D] model the total net flux is equal to the source term
Z
Q1D =
2
Γ
KM
1
pf − (pp |R + pp |−R ) dv.
µi dM
2
(7.2)
A indicator is the shape of the plot-over-line curve obtained by plotting the velocity normal to the
vessel wall in a distance of 50 µm from the vessel wall. A indicator is the effective pressure profile
obtained as a plot-over-line curve on a characteristic cross-section.
The meshes used in this work are triangulations of the model domain. The meshes were generated
with the software Gmsh1 (GNU General Public License). The meshes for the spatially resolved
models [2D-FC] and [2D-IT] are refined towards the vessel in order to resolve the geometry of the
capillary. For a mesh refinement study the mesh is additionally uniformly refined using a build-in
mesh refinement function in FEniCS. Figure 7.1 shows a cutout of the reference case mesh (refined
1 http://www.geuz.org/gmsh/
51
Figure 7.1 – Cutout of the mesh of the reference case showing mesh refinement towards the
vessel.
Figure 7.2 – Mesh of the reference case for the [1D] model. Mesh turned by 90◦ .
once) that displays the mesh refinement towards the capillary. Figure 7.2 shows the reference case
mesh (unrefined) used for the [1D] model.
52
Symbol
lcap
Name
Value
Length of the capillary
Unit
1 · 10
−3
m
−6
m
R
Radius of the capillary
4.3 · 10
dp
Half the estimated intercapillary distance
100 · 10−6
m
µ
Blood viscosity
2.8 · 10−3
P as
µi
Viscosity of interstitial fluid
1.3 · 10−3
P as
−18
m2
2.34 · 10−20
m2
6.5 · 10
K
Intrinsic permeability of the tissue
KM
Intrinsic permeability of the vessel wall
dM
Thickness of the vessel wall
6.0 · 10−7
3.0 · 10
m
−11
m
P as
Lp
Hydraulic conductivity of the vessel wall
p̄f,in
Effective pressure at aterial end
400
Pa
p̄f,out
Effective pressure at venous end
−1600
Pa
p̄p
Effective pressure at distance dp from vessel wall
−933
Pa
γf
Acceleration parameter [2D-IT]
1.0 · 1011
–
γp
Acceleration parameter [2D-IT]
10
–
θ
Relaxation parameter [1D]
0.26
–
3.3333 · 10
Table 7.1 – Parameters used in the reference case.
7.A
The reference scenario
The reference scenario describes a single capillary of length lcap = 1 mm, surrounded by the tissue
of the capillary bed. The setup is symmetric with blood flowing in the capillary from top to bottom,
i.e. from the arterial to the venous end. The free-flow domain Ωf , the surrounding tissue Ωp and
the applied boundary conditions are shown in Figure 7.3. In case of reduction of the vessel to
one dimension the vessel domain Ωf is reduced to its centerline. The same boundary conditions
are applied. To give an overview over the parameters associated with the reference scenario all
parameters are listed in Table 7.1.
7.B
Variations in geometry
Blood vessels in living tissue exhibit a large variety of geometrical shapes. Vessels split into two
vessels at bifurcations, rejoin, and even bypasses and loops are often encountered. This scenario
is designed to find how the model behaves when the geometry is altered from the symmetrical
53
Symbol
µ
Name
Lower bound
Upper bound
−3
−3
P as
−14
2.0 · 10
Blood viscosity
3.5 · 10
Unit
K
µi
Hydraulic conductivity of tissue
1.2 · 10
Lp
Filtration coefficient of the vessel wall
2.5 · 10−12
1.5 · 10−9
m2
P as
m
P as
R
Radius of the capillary lumen
1.5 · 10−6
5.0 · 10−6
m
−15
2.7 · 10
Table 7.2 – Parameters and their range for case C obtained from the literature study in Ischinger
[2013]. Remarks to the parameters can be found in Section 2.5
reference case. Furthermore, it is to be determined if the [2D-FC] model responds differently from
the [1D] model. To this end, the geometry is altered to an arc and a bifurcation. In both cases the
geometry of the tissue follows the geometry of the vessel in order to have comparable boundary
effects to the reference case. Both scenarios use the same model parameters as the reference case
(Table 7.1). Comparisons exclude the [2D-IT] model for time reasons.
The Arc. —
For the arc geometry the capillary makes a 90◦ turn. The length of the capillary is
still lcap = 1 mm. The boundary conditions are chosen in analogy to the reference case. The arc
introduces asymmetry as the interface is longer and the tissue area greater on the outer, left side
of the vessel, and the interface is shorter and the tissue area smaller on the inside. The geometry
and the applied boundary conditions are shown in Figure 7.4.
The Bifurcation.
—
In the bifurcation geometry the capillary splits into two vessel of each
lcap,2 = 0.5 mm after a distance of lcap,1 = 0.5 mm from the inlet. For simplicity the two child
branches have the same radius R = 4.3 · 10−6 m as the mother branch. The geometry and the
applied boundary conditions are shown in Figure 7.5. The geometry has the property that the
problem is close to symmetric (with respect to the vessel centerline) towards the end of a branch
and asymmetric around the bifurcation.
7.C
Variations of model parameters
The current model is far from a real, in-vivo scenario. Testing the model with a wide range
of parameters makes it possible to foresee model behavior for different parameters. A range of
parameters for capillaries was obtained in a literature study by Ischinger [2013]. Model response to
parameter change and the comparison of the [2D-FC] model with the [1D] model is the purpose of
this scenario. The geometry is chosen to be the same as in the reference case. One parameter is
altered while the others stay fixed. The parameters in question and the tested range are listed in
Table 7.2.
54
Neumann no-flow
boundary condition
(vp · n = 0)
Dirichlet
boundary condition for
effective pressure
pf = 400 P a
Centerline
Interface Γ
Ωf
Ωp
Ωp
y
x
n
1 mm
n
Dirichlet
boundary condition for
effective pressure
pp = −933 P a
Dirichlet
boundary condition for
effective pressure
pf = −1600 P a
100 µm
8.
6
100 µm
µm
Figure 7.3 – Reference scenario (case A) and applied boundary conditions.
55
Neumann no-flow
boundary condition
(vp · n = 0)
Dirichlet
boundary condition for
effective pressure
pf = 400 P a
Dirichlet
boundary condition for
effective pressure
pp = −933 P a
Centerline
lcap = 1 mm
Interface Γ
Ωp
Ωf
Dirichlet
boundary condition for
effective pressure
pf = −1600 P a
Ωp
n
n
100 µm
y
x
8.6 µm
Dirichlet
boundary condition for
effective pressure
pp = −933 P a
100 µm
Figure 7.4 – Arc scenario (case B.1) and applied boundary conditions.
56
m
0µ
10
m
µ
8.6
100
µm
Neumann no-flow
boundary condition
(vp · n = 0)
Dirichlet
boundary condition for
effective pressure
pf = 400 P a
n
n
Centerline
Interface Γ
Dirichlet
boundary condition for
effective pressure
pp = −933 P a
Ωf
Dirichlet
boundary condition for
effective pressure
pf = −1600 P a
y
x
Ωp
Ωp
Ωp
100 µm
100 µm
8.6 µm
8.6 µm
100 µm
Dirichlet
boundary condition for
effective pressure
pp = −933 P a
100 µm
Figure 7.5 – Bifurcation scenario (case B.2) and applied boundary conditions.
57
8
Results and Discussion
Reference case A. —
The reference case shows excellent compliance of all three models. Differ-
ences in pressure, velocity, and total flux over the interface are less than 1 %. The reference case is
characterized by its symmetric geometry with respect to the vessel centerline. The radial symmetry
of the vessel was an integral assumption in the derivation of the [1D] model (see Section 3.3).
This assumption holds true for the reference case. In fact, the major difference between the fully
spatially resolved models and the [1D] model is the negligence of the velocity in radial direction
and the resulting pressure gradient in radial direction. However, the results show that the neglect
is justified for the reference case as the differences between the spatially resolved models and the
reduced vessel model are small. A surface plot of the pressures is shown in Figure 8.1. One notices
the reduced geometry of the vessel. Visually, the pressure plots are equal. Figure 8.2 shows a plotover-line for the pressure for both the [2D-FC] model and the [1D] model. Looking closely it can
be seen that the altitude of the pressure jump differs by less than 1 %. The pressure jump across
the interface in around 200 P a, which corresponds to fluid filtration into the tissue. The pressure
jump at the inlet is as high as 800 P a. At the outlet the pressure jump is around −400 P a and
results in reabsorption of fluid into the capillary. Figure 8.3 shows the velocity plotted over a line
through the tissue domain. The normal component of the velocity shows an almost linear profile,
while at the top and bottom of the domain the slope is 0 due to the no-flow boundary condition.
In close inspection, one can see that the functions differ by approximately 1 % on the upper and
lower boundary, while both models show the same zero-crossing. This shows that the sign of the
pressure jump over the vessel wall is identical whereas the altitude slightly differs. The total net
fluxes over the interface as an integral measure, shown in Table 8.1, match well.
Model
Geometry
Total net flux
[2D-FC]
Reference
1.24516 · 10−11
[2D-IT]
Reference
1.24528 · 10−11
[1D]
Reference
1.24603 · 10−11
Unit
m2
s
m2
s
m2
s
Table 8.1 – Total net flux across the capillary wall for the [2D-FC], [2D-IT], and [1D] models
for the reference case.
58
Figure 8.1 – Effective pressure solution for the [2D-FC]/[2D-IT] model (right) and for the
[1D-IT] model (left).
The differences between the model cannot be traced back to a specific source. The neglect of the
radial pressure gradient can be one of them. Also numerical error can lead to small differences.
Figure 8.1 shows the pressure in the middle of the vessel.
Grid convergence. —
Usually, the solution is expected to converge to the exact solution when
the mesh gets finer and finer, also called grid convergence. For the coupled Darcy-Stokes coupled
problem with the new interface conditions the author could not identify a manufactured exact
solution. Yet, it is possible to obtain the experimental range of convergence calculated as
rk =
ln e k − ln e k−1
,
k−1
k
ln hmax
− ln hmax
where e k is the error with respect to the solution u N calculated for the finest grid in the L2 -norm
for the considered primary variable e k = ||u k − u N ||L2 . The refinement step is denoted by k, where
the coarsest grid is k = 0, and hmax is the maximum element diameter calculated as the length
for (one-dimensional) intervals and twice the circumradius for triangles. The results are shown in
Tables 8.2 to 8.5. The convergence orders are, as expected, close to (p + 1), where p is the
59
p in P a
−600
[2D-FC]
[1D-IT]
−650
−700
−750
−800
−850
−900
−950
−1
0
1
×10−4
x in m
Figure 8.2 – Plot-over-line (y = 0 m) for the effective pressure. Also the [2D-IT] model was
in excellent accordance but is omitted in this plot for the sake of clarity.
polynomial degree of the finite element [Knabner and Angermann, 2000]. For the [2D-IT] model it
was difficult to construct a coarse enough mesh so that the norms do not fall under the numerical
threshold of double precision and then are distorted by numerical errors. This shows, given that
the algorithm converges against the exact solution, that the approximation is already excellent even
for coarse grids. The order of polynomials in the Stokes domain is one degree higher that for the
[2D-FC] model with BDM1 × DG0 -elements. On the other hand, the approximation degree in the
Darcy domain is one degree higher for the pressure but one degree lower for the velocity compared
to the [2D-FC] model. This results in a difference in performance as the velocity is a vector-valued
function.
k
hmax
||p k − p N ||L2
Rate r k
||vk − vN ||L2
Rate r k
0
2.40511 · 10−5
0.00256983
−
1.41953 · 10−8
−
1
1.20256 · 10
−5
6.01278 · 10
−6
0.00056086
3.00639 · 10
−6
−
2
3=N
0.00125404
3.47647 · 10
−9
2.02972
1.16088
7.95118 · 10
−10
2.12838
−
−
1.03509
−
Table 8.2 – Convergence rates and errors for the [2D-FC] model with BDM1 × DG0 -elements
for k mesh refinements (reference case).
60
vx = v · n in
m
s
×10−8
2.5
[2D-FC]
[1D-IT]
2
1.5
1
0.5
0
−0.5
−1
−1.5
−5
−4
−3
−2
0
−1
1
2
3
4
5
×10−4
y in m
Figure 8.3 – Plot-over-line (x = 50 · 10−6 m) for the x-velocity and reference geometry. Also
the [2D-IT] model was in excellent accordance but is omitted in this plot for the sake of clarity.
k
hmax
0
0.00017506
1
2
3
4
5
6
7=N
||pp k − pp N ||L2
Rate r k
||pf k − pf N ||L2
Rate r k
0.000747285
−
0.000159071
−
8.75298 · 10
−5
4.37649 · 10
−5
2.18824 · 10
−5
1.09412 · 10
−5
5.47061 · 10
−6
2.73531 · 10
−6
1.82932 · 10
2.1678
5.01169 · 10
1.36765 · 10
−6
−
−
−
0.000206575
−5
5.36662 · 10
−5
1.35698 · 10
−6
3.38178 · 10
−7
8.21981 · 10
−7
1.85499
1.94458
1.98361
2.00455
2.04061
3.99714 · 10
−5
1.99263
1.00007 · 10
−5
1.99886
2.49555 · 10
−6
2.00268
6.18063 · 10
−7
2.01353
1.60748 · 10
−7
1.94296
−8
1.68143
−
Table 8.3 – Convergence rates and errors for the [1D] model for k mesh refinements (reference
case). The maximal element diameter hmax is related to the mesh of the tissue domain.
Performance.
—
The models are not easy to compare performance-wise. Due to different
discretization schemes that arise from the applied discretization techniques, the [2D-FC] and the
[2D-IT] model can have the same approximation qualities in the Stokes domain. The velocity can
be approximated with 2nd order polynomials and the pressure with 1st order polynomials. However
then, in the Darcy domain, the velocity is approximated with 2nd order polynomials and the pressure
61
k
hmax
||pf k − pf N ||L2
Rate r k
||vf k − vf N ||L2
Rate r k
0
0.000106216
1.11083 · 10−7
−
3.24379 · 10−12
−
1
5.3108 · 10
−5
−8
2.75876 · 10
2
2.6554 · 10−5
3
4=N
2.00955
4.0964 · 10
−13
2.98525
6.62825 · 10−9
2.05732
5.2472 · 10−14
2.96474
1.3277 · 10−5
1.37215 · 10−9
2.27219
7.52902 · 10−15
2.80101
6.6385 · 10−6
−
−
−
−
Table 8.4 – Convergence rates and errors for the [2D-IT] model (Stokes domain) for k mesh
refinements (reference case). The maximal element diameter hmax is the maximal diameter of
both meshes.
||pp k − pp N ||L2
Rate r k
0.000106216
0.000987003
−
5.3108 · 10
−5
0.000248515
1.98972
2.6554 · 10
−5
3
1.3277 · 10
−5
4=N
6.6385 · 10−6
k
hmax
0
1
2
−5
2.01591
−5
1.45899 · 10
2.07438
−
−
6.14473 · 10
Table 8.5 – Convergence rates and errors for the [2D-IT] model (Darcy domain) for k mesh
refinements (reference case). The maximum element diameter hmax is the maximum diameter
of both meshes.
with 1st order polynomials in the [2D-FC] model, but in the [2D-IT] model the velocity is calculated
in a post processing step from the 1st order polynomial pressure and is thus constant on each
element. The pressure is the only primary variable in the Darcy domain. The velocity can be
interpolated to a higher degree space. This leads to a speed up of the [2D-IT] model in comparison
to the [2D-FC] at the expense of approximation quality. The [2D-IT] model has the advantage of
a non-matching grid being possible on the vessel-tissue interface. Thus, the degrees of freedom
in the Darcy domain can be reduced with almost the same approximation quality. All linear sub
systems of the [2D-IT] were solved with direct solvers. The LU-factorization only needs to be
calculated in the first iteration step and can be reused for all following steps. The resulting CPU
time for different orders of approximation and grid refinements is listed in Table 8.7 for comparison.
With BDM1 × DG0 -elements the [2D-FC] model has a lower order of approximation for velocity
and pressure in the Stokes domain than the [2D-IT] model. In the Darcy domain the pressure is
then approximated with piecewise constant functions whereas the [2D-IT] model uses continuous
piecewise linear polynomials. With BDM2 × DG1 -elements the [2D-FC] model has the same order
of approximation in the Stokes domain, but the velocity in the Darcy domain is approximated with
piecewise quadratic polynomials whereas the [2D-IT] model approximates the Darcy velocity with
piecewise constant functions. Comparison shows a small speed-up when using the iterative method
62
a
a
Model
Stokes
Darcy
[2D-FC]
BDM1 × DG0 mixed
BDM1 × DG0 mixed
[2D-FC]
BDM1 × DG0 mixed
[2D-FC]
aa
Refined
CPU time
62464
0×
3.13686 s
BDM1 × DG0 mixed
249536
1×
12.0146 s
BDM1 × DG0 mixed
BDM1 × DG0 mixed
997504
2×
52.8845 s
[2D-FC]
BDM1 × DG0 mixed
BDM1 × DG0 mixed
3988736
3×
801.189 s
[2D-FC]
BDM2 × DG1 mixed
BDM2 × DG1 mixed
163788
0×
7.11062 s
[2D-FC]
BDM2 × DG1 mixed
BDM2 × DG1 mixed
654672
1×
33.4671 s
[2D-IT]
P32 -P1
P32 -P1
mixed
P1 (pressure only)
24907
0×
mixed
P1 (pressure only)
19217
0×
mixed
P1 (pressure only)
69229
1×
8.76692 s
[2D-IT]
P32 -P1
P32 -P1
mixed
P1 (pressure only)
365965
2×
37.173 s
[2D-IT]
P32 -P1
mixed
P1 (pressure only)
1054939
3×
275.892 s
[2D-IT]
[2D-IT]
DOFs
3.0776 s
aaa
1.91084 s
Table 8.6 – Comparison of performance measured in CPU time on the same meshes. Total
CPU time includes solver time, all iteration steps, and all necessary pre- and post-processing
steps. All calculation were executed on a MacBookPro (2.53 GHz Intel Core 2 Duo / 4GB
Memory).
One refinement step divides every triangle into four triangles.a a
a
Discretization method of the primary variables pressure and velocity.
Number of degrees
of freedom; for the [2D-IT] the number is calculated from the size of all linear systems to be
solvedaina a
one iteration step, the Darcy velocity is only calculated once in a post-processing
step.
The mesh of the Darcy domain was coarsened resulting in hanging nodes on the
aaa
interface.
Refinement of Darcy mesh towards interface was reduced.
of model [2D-IT] due to a reduction of the degrees of freedom of the system. The speed-up is more
significant the finer the mesh. This is easily explained as degrees of freedom on a vertex are shared
with several elements but degrees of freedom on edges are only shared with the neighboring element
(for continuous function spaces). Due to discretization schemes fitted to the subproblem and the
mesh flexibility on the interface, the [2D-IT] is faster than the [2D-FC] model for the reference
case. With the reduction of the Stokes domain to one dimension the number of degrees of freedom
can be reduced by 98 % in the Stokes domain. This leads to a significant speed-up. The velocity is
calculated as a post-processing step for both domains. In each iteration step ca. 10 % of the time
is used to calculate the Stokes step, 90 % are used for the Darcy step. From the latter, 50 % of
the time is consumed by pressure evaluation, point-source calculation, and point source application
to the Darcy system right-hand-side vector, and 50 % is consumed by solving the actual Darcy
linear system. The post-processing, namely, output VTK files and calculation of the velocities takes
about 45 % of the total CPU time. Because of the small total time of the algorithm the time is
overproportionally distorted by simple operation, e.g. file output, that get insignificant for larger
linear systems. It can be concluded that the model reduction leads to a speed-up of at least 90 %
in comparison with the [2D-FC] model.
63
a
a
Model
Stokes
Darcy
DOFs
[1D]
P1 (pressure only)
P1 (pressure only)
[1D]
P1 (pressure only)
[1D]
[1D]
aa
Refined
CPU time
1162
0×
0.466947 s
P1 (pressure only)
4322
1×
0.773448 s
P1 (pressure only)
P1 (pressure only)
16642
2×
2.59135 s
P1 (pressure only)
P1 (pressure only)
65282
3×
10.1879 s
Table 8.7 – CPU time for several refined meshes. Total CPU time includes solver time, all
iteration steps, and all necessary pre- and post-processing steps. All calculation were executed
on a MacBookPro (2.53 GHz Intel Core 2 Duo / 4GB Memory). One refinement step divides
every
triangle into four triangles and every interval into two intervals. a a
a
Discretization method of the primary variables pressure and velocity.
Number of degrees
of freedom; for the [2D-IT] the number is calculated from the size of all linear systems to
be solved in one iteration step, the Darcy and Stokes velocity are only calculated once in a
post-processing step.
Acceleration and relaxation parameters. —
The performance of the iterative algorithms of model
[2D-IT] and [1D] is highly dependent on the number of iterations until convergence. Errors for
both models were calculated as the sum of the ||u k − u k−1 ||L2 -norms of all primary variables, where
k is the current iteration step. Primary variables for the [2D-IT] model are velocity and effective
pressure in the Stokes domain and pressure in the Darcy domain. Primary variables for the [1D]
model is effective pressure in both domains. The method is here considered to be converged when
the error in the L2 -norm drops below the tolerance of 10−10 .
Figure 8.4 shows the number of iterations with respect to the acceleration parameter γp . The
least iterations (5) are needed if γp =
1
Lp .
is dominated by the filtration coefficient.
parameter remained γp =
1
Lp .
This shows that the relation between the subsystems
Also for parameter changes the optimal acceleration
The algorithm is surprisingly robust towards parameter changes
with the number of iterations being always under 10 for the tested literature value range (see
Section 7.C).
Figure 8.5 shows the number of iteration with respect to the relaxation parameter θ for the [1D]
model. The least iterations (20) in the reference case are needed when θ = 0.26. The optimal choice
of θ is highly dependent on the set of parameters. For higher values of the filtration coefficient, e.g.,
the algorithm might even diverge for θ = 0.26. The right graph in Figure 8.5 shows the iteration
number with respect to θ for several filtration coefficients Lp . The respective optimal choices for θ
seem to fall on one exponential curve. For the highest filtration coefficient Lp = 1.5 · 10−9
m
P as
the
algorithm does not converge within 500 iteration steps. The optimal choice of θ is beyond 0.95.
This means in particular that the [1D] model has a bad performance for high filtration coefficients
and a very good performance for low filtration coefficient. One could say that if there is a high
flow resistance between the free-flow and the porous domain the algorithm converges faster. For all
64
number of iterations, tolerance = 10−10
100
90
80
70
60
50
40
30
20
10
0
1
2
3
4
5
6
7
×1010
γp
Figure 8.4 – Acceleration parameter γp and number of iteration until convergence. The other
parameter γf fixed to γf = 3γp . The filtration coefficient Lp = 3.0 · 10−11 is that of the
reference case. Maximum iteration number was set to 100.
filtration coefficients and permeabilities a θ can be found so that the algorithm converges. However,
for very high filtration coefficients θ can be so high that the algorithm does not converge within a
reasonable time. On the other hand, modeling capillary systems, the filtration coefficient is limited
by values observed in experiments and it can be estimated from the literature values that it is seldom
higher than the values experimented with in this work. It can be thus stated that the presented
[1D] algorithm converges for all parameter ranges of interest.
Penalty parameter for the coupled problem [2D-FC]. —
The [2D-FC] discretization features a
stabilization term on the interface. It is supposed to assure stability on the interface and enforce
the Dirichlet boundary condition for the tangential velocity (vf · τ = 0 on Γ). An estimation of
the penalty parameter was obtained for the Stokes problem in Section 4.7. A comparison with an
exact solution was not available for the coupled problem. However, as the pressure and the velocity
converge, possible oscillations get smaller by reducing grid size. To test the parameter on the
interface we set α = 0.5β and calculated the normal velocity field on the interface for the [2D-FC]
and the [1D] model. The [1D] velocity on the interface was then assumed as the reference value
[1D]
vref . We calculated the norm ||(v · n)[2D-FC] − vref ||l 2 and plotted it over the penalty parameter
α in Figure 8.6 (left). In the right plot of Figure 8.6 a plot of the normal velocity (normal to
the interface) over the interface is plotted for two different penalty parameters. It is visible that
for α = 1.0 velocity oscillations occur while they are not visible for α = 3.4. As for the Stokes
65
number of iterations
number of iterations
500
450
400
350
300
250
200
150
100
50
0
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
500
450
1.5 · 10−12
400
3.0 · 10−11
350
1.5 · 10−10
300
1.5 · 10−9
250
200
150
100
50
0
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
θ
θ
Figure 8.5 – Number of iterations of the [1D] model until convergence with respect to the
relaxation parameter θ. Maximum number of iterations was set to 500. Reference case (left)
and for different filtration coefficients Lp (right).
m
s
−8
||v · n − vref ||l 2
v · n in
×10−7
5
4.5
4
3.5
3
2.5
2
1.5
1
0.5
0
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
×10
3
α = 1.0
2.5
α = 3.4
2
1.5
1
0.5
0
−0.5
−1
−1.5
−5 −4 −3 −2 −1 0
1
2
3
4 5 −4
×10
y in m
penalty parameter α
Figure 8.6 – Error between [1D] and [2D-FC] model for different penalty parameters (left).
Plot-over-line on the vessel-tissue interface (x = 4.3 · 10−6 m) for the x-velocity and reference
case (right).
discretization of Section 4.7 the error shrinks until an optimal penalty parameter (here α = 3.5)
and then steadily but slowly rises (for values α > 3.4).
Geometry tests (case B). —
The geometry test features two altered geometries, an arc and a
bifurcation. Both mimic shapes of capillaries as they could occur in mammals. The arc geometry
has a larger exchange surface (vessel wall) on the outside of the bending than on the inside.
66
Furthermore, the surrounding tissue has a larger volume outside than on the inner side of the
bending. This introduces asymmetrical features. The bifurcation has asymmetric features around
the bifurcation and symmetric features at the end of the respective branches. Figures 8.7 to 8.9
show the pressure field and plot-over-line graphs for pressure and velocity for the arc geometry.
Figures 8.10 and 8.11 display analogous results for the bifurcation geometry. At the points were
we have an asymmetrical flow field with respect to the vessel centerline, e.g. where the vessel
bifurcates, the pressure distinctly differs in the two models. A difference of 10 % is observed at
the most extreme points. Regarding the interpretation it is unclear which of the models would be
actually closer to an in-vivo measurement. The reason is the dimension of the models used for the
results of this paper. In a 3D-3D model fluid has the opportunity to flow around the vessel. In a
2D-2D model fluid has to go inside the vessel first and leave the vessel on the other side in order
to cross. A 2D-2D model behaves similar to a 3D-3D model in a radial symmetric case where it
represent a slice through the centerline of the vessel. In an asymmetric case such as the arc the
2D-2D model corresponds more to a 3D-3D model where the vessel is a vertical cleft separating a
left and a right tissue domain. Therefore, the model reduction to two dimension does not represent
the original geometry anymore. In contrast, the set-up of the [1D] model still allows for flow in
the porous domain without obstacles. It is thus still similar to a 1D-3D model or a 3D-3D model
where fluid can pass the vessel by flowing around. Unfortunately this conceptual mistake does
not allow for comparison of accuracy between the spatially resolved and the reduced model. The
comparison must be done with a full 3D-3D model. The implementation was unfortunately not
possible within the time framework of this thesis and is an interesting research question for future
works. Nevertheless it can be estimated that the difference with a 3D-3D model will be smaller
than the differences observed with the 2D-2D model. For the sake of completeness we continue
the analysis with the available results. The surface pressure plots Figures 8.7 and 8.10 at first show
no significant differences between the two models. Differences become visible when plotting over
characteristic lines. In Figure 8.8 the [2D-FC] model shows different sized jumps on the inner and
outer interface, whereas the [1D] model pressure field is almost symmetrical. Two effects occur.
The inner interface is slightly shorter than the outer interface, and, the inner tissue area is smaller
than the outer tissue area leading to a ”damming” effect on the inside. In the [1D] model these
pressure differences can be evened out by flow exchange not hindered by the vessel. Figure 8.9
shows higher velocities on the inside due to a reduced tissue area in comparison with the outer
tissue domain. The [1D] model shows only little asymmetry which is most likely a boundary effect.
Parameter variations (case C). —
We varied the model parameters Lp , µ,
K
µi ,
and R in a wide
range (see Table 7.2). For all parameter sets and the symmetric reference geometry, the [1D] and
the [2D-FC]/[2D-IT] models are in excellence accordance. The most sensitive parameter was found
to be Lp which is partly due to its large uncertainty in literature but also because it dominates
67
Figure 8.7 – Effective pressure solution for the [2D-FC] model (right) and for the [1D-IT]
model (left).
p in P a
−600
[2D-FC]
[1D-IT]
−650
−700
−750
−800
−850
−900
−950
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6 −4
×10
x in m
Figure 8.8 – Plot-over-line (y = x m) for the effective pressure.
the flow exchange of vessel and tissue and therefore the whole flow field. The pressure is shown
as a plot-over-line in Figure 8.12 for four different filtration coefficients. The filtration coefficient
68
v · n in
m
s
×10−8
1.5
[2D-FC] left
[2D-FC] right
[1D-IT] left
[1D-IT] right
1
0.5
0
−0.5
−1
−1.5
−2
−2.5
0
10
20
30
40
50
60
70
80
90
θ in degree
Figure 8.9 – Plot-over-line at d = 50 · 10−6 m perpendicular to the vessel centerline for the
normal velocity v · n. The normal vector n is the unit normal on the vessel-tissue interface.
Model
Geometry
Total net flux
[2D-FC]
Reference
1.24516 · 10−11
[2D-IT]
Reference
1.24528 · 10−11
[1D]
Reference
1.24603 · 10−11
[2D-FC]
Arc
1.23978 · 10−11
[1D]
Arc
1.24487 · 10−11
[2D-FC]
Bifurcation
1.39925 · 10−13
[1D]
Bifurcation
−1.42522 · 10−13
Unit
m2
s
m2
s
m2
s
m2
s
m2
s
m2
s
m2
s
Table 8.8 – Total net flux across the capillary wall for the [2D-FC] model and the [1D] model
for different geometries.
determines the height of the pressure jump and correlated, the velocity across the vessel wall. The
dashed lines ([1D]) and the drawn through lines ([2D-FC]) align excellently.
The quality of the
result was the same for all parameters, while the hydraulic conductivity of the tissue had a bigger
influence than the viscosity or the radius that had a small impact on pressure and velocity fields.
The parameters also have an influence on the numerical parameters. The impact of the filtration
coefficient on the acceleration parameters of the [2D-IT] have already been discussed. With the
69
Figure 8.10 – Effective pressure solution for the [2D-FC] model (right) and for the [1D-IT]
model (left).
p in P a
−920
[2D-FC]
[1D-IT]
−940
−960
−980
−1000
−1020
−1040
−1060
−1080
−1100
−1120
−2
0
−1
1
2
×10−4
x in m
Figure 8.11 – Plot-over-line (y = −0.1 · 10−3 m) for the effective pressure.
70
p in P a
−500
1.5 · 10−12
−550
3.0 · 10−11
−600
1.5 · 10−10
−650
1.5 · 10−9
−700
−750
−800
−850
−900
−950
−1
0
1
×10−4
x in m
Figure 8.12 – Plot-over-line (x = 0 m) of the effective pressure for different filtration coefficients Lp . Dashed lines show the results of the [1D] model and the results of the [2D-FC]
model are drawn through. Also the [2D-IT] model was in excellent accordance to the other
results. The graph is not plotted for reasons of clarity.
optimal γp =
1
Lp
the iterative algorithm was very robust with respect to all parameter variations
with ±2 iteration steps. Less robust was the iterative algorithm for the [1D] model. The algorithm
converges but the number of iteration rises significantly with higher filtration coefficients.
Non-matching grids for the [1D] model. —
The [1D] model can also handle non-matching grids.
All previous grids were matching in the sense that intervals always aligned with edges. Vertices
do not necessarily match. For the purpose of demonstration a case was constructed where the
one-dimensional vessel grid does not match the two-dimensional tissue grid. This introduces errors
that get smaller with shrinking grid size. However, when thinking of large vessel networks it is a
great advantage of the tissue and vessel mesh can be constructed totally independent of each other.
The grid is shown in Figure 8.14 and the pressure field in Figure 8.13. The plot clearly shows the
pressure jump between free-flow and porous domain. It can be seen that directly underneath the
vessel the porous pressure is not symmetric due to the shifted one-dimensional grid. The error
introduced with the non-matching grid shrink with the grid size or the approximation degree of the
pressure used in the numerical method.
71
Figure 8.13 – Pressure in free-flow pf and porous domain pp at the example of a non-matching
grid. The plot is warped perpendicular to the x-y-plane and scaled with the pressure value at
each grid point.
Figure 8.14 – Non-matching grid for the [1D] model. The one-dimensional domain is a bifurcation, with Dirichlet boundary conditions at inlet (top branch) p̄in = 400 P a and outlet
(both bottom branches) p̄out = −1600 P a. The porous domain is rectangular with Dirichlet
boundary conditions p̄ = −933 P a on the whole boundary.
72
9
Summary and Outlook
In this work, a spatially resolved model of a capillary bed with three compartments, vessel, tissue,
and capillary wall, was reduced in two steps. First, the vessel wall was reduced to a two-dimensional
surface of the vessel resulting in a new set of interface conditions for a Darcy-Stokes coupled
problem with selective permeable membrane. Secondly, the vessel was reduced to its centerline
resulting in a one-dimensional vessel coupled with the surrounding full-dimensional tissue through
line sources. For the latter step and the immediate step, numerical discretization and solution
methods were proposed and discussed. A locally conservative discontinuous Galerkin discretization
using BDM-elements was designed and evaluated for a 2D-2D coupled Darcy-Stokes system with
new interface conditions. An alternative continuous Galerkin discretization was introduced in order
to decompose the system into two subsystems that can be solved in a sequential iterative algorithm.
Finally, an iterative algorithm for solving a system of a one-dimensional vascular graph placed inside a
two-dimensional (porous) tissue domain and coupled through line sources was proposed and tested.
The model assumptions were challenged by constructing several test cases. Numerical and physical
model parameters were varied over a wide range obtained from literature. It was shown for model
parameter variations (µ,
K
µi ,
Lp , R) that
◦ spatially resolved and spatially reduced models produce (almost) identical results for a wide
range of parameters (for symmetrical geometries)
◦ the parameter with the highest influence is the filtration coefficient Lp
◦ for a high filtration coefficients the relaxation parameter is so high that the [1D] converges
significantly slower whereas the [2D-IT] iterative algorithm is robust to parameter changes.
Two geometrical test cases were introduced to analyze the model response to asymmetry. The
comparison shows that a model reduction and the corresponding assumptions are valid in a wide
range of parameters and geometries. The [1D] model can not resolve highly asymmetric situation as
one assumption in its derivation is that of radial symmetry of the vessel and the close surrounding.
Concerning the geometry, an open questions remains if a 2D-2D model can be compared with the
presented 1D-2D model, or, if the only valid comparison would be 3D-3D to 1D-3D. This is to be
determined in future works. Looking into the future and envisioning larger problem domains a fast
73
intersection detection algorithm can become a relevant time saver for the reduced model. Further
reduction could include the homogenization and upscaling of the smallest capillaries, combining
the two methods of model reduction. The model is yet to be verified with flow measurements
and related geometries from experiments. The discretization method introduced for the [2D-FC]
if further improved to avoid any oscillation could be of great interest modeling flow processes over
membranes locally.
The solvers have been evaluated with respect to CPU time consumed, convergence order, and
for numerical parameter variations. The [2D-IT] showed that an iterative solver can be faster if
advantages of domain decomposition like possibility of non-matching grids and possibility of reduced
polynomial approximation degree are exploited. The iterative solution algorithm of the [1D] model
can be a fast and easy to implement alternative to direct solution methods, e.g. as in Cattaneo and
Zunino [2013], if the exchange between free-flow and porous domain is not too large. Chapter 8
showed in detail for the numerical parameters that
◦ the acceleration parameters of the [2D-IT] algorithm are highly dependent on the filtration
coefficient
◦ the optimal acceleration parameter is found to be γp = 1/Lp
◦ the relaxation parameter of the [1D] model is highly parameter dependent and sets a lower
bound for the number of iterations until convergence
◦ the convergence of the [1D] algorithm is fast if the exchange between vessel and tissue is low
◦ the penalty parameters of the [2D-FC] model could not be chosen perfectly in order to avoid
any oscillations on the interface.
The results show optimal convergence order of all introduced methods. With respect to CPU the
following results were obtained:
◦ the [2D-FC] is the slowest but not necessarily the one with the highest approximation order
◦ the [2D-IT] can save some degrees of freedom with suitable functions spaces chosen for each
subproblem and the possibility of non-matching grids (ca. −50 %)
◦ the [1D] model exhibits significant speed-up with at least −90 % in comparison with the
[2D-FC] model.
Finally, it was additionally shown that an SIPG method can stabilize a BDM-DG mixed variational
formulation of the Stokes problem and that this leads to optimal grid convergence of velocity and
pressure in the L2 -norm and the penalty parameter has a lower bound. This makes it possible to
treat Darcy-Stokes coupled problems with a unified discretization that allows for jumps inside the
domain.
74
For the future, it is still undetermined what restrictions apply to the penalty parameter for the DarcyStokes coupled problem with the new interface conditions. The system, using a BDMk /DGk−1
discretization is yet to be mathematically analysed. Further, concerning computational time, a
comparison between a preconditioned [2D-FC] model and the [2D-IT] iterative method where each
subsystem is preconditioned would yield more insight into which model is computationally more
efficient in order to calculated localized problems involving a single blood vessel. The computationally by far most efficient [1D] model has to be improved with respect to parameter sensitivity.
Alternatively, a (preconditioned) fully coupled approach is worth investigating and can be compared
with the iterative solver. Most importantly, a 3D-3D vessel-tissue model has to implemented to be
compared with the [1D] model in order to correctly determine the influence of geometrical effects
on the solution of the spatially resolved and the spatially reduced model.
The developed model for coupling the flow in blood vessels with the flow in the surrounding tissue
can be applied to specific topics of medical interest in the future. To this end, not only the flow fields
have to be modeled but in particular transport and reaction processes are essential. Furthermore,
the model can be combined with a vascular growth model to simulate flow field of the vascular
network is growing. This way, it may be possible to make prediction for treatment of tumors with
therapeutic agents (e.g. nano particles), blood supply and growth of tumors (angiogenesis), or
oxygen transport to the brain in case of a stroke. Finally, contributions to predicting transport
of antibiotics to biofilms on artificial implants or to understanding of regeneration of brain tissue
during the sleep become possible.
75
Bibliography
Abramowitz, M. and Stegun, I. A. (1972). Handbook of mathematical functions: with formulas,
graphs, and mathematical tables, pages 887–888. Number 55. Courier Dover Publications.
available here: http://people.math.sfu.ca/˜cbm/aands/abramowitz˙and˙stegun.pdf.
Arnold, D. N. (1982). An interior penalty finite element method with discontinuous elements. SIAM
journal on numerical analysis, 19(4):742–760.
Baber, K. (2009). Modeling the transfer of therapeutic agents from the vascular space to the tissue
compartment (a continuum approach). Master’s thesis, Universität Stuttgart.
Baber, K. (2014). Coupling fuelcells and bloodflow. PhD thesis, University of Stuttgart.
Beavers, G. S. and Joseph, D. D. (1967). Boundary conditions at a naturally permeable wall.
Journal of fluid mechanics, 30(01):197–207.
Boer, R. (2000). Theory of porous media: highlights in historical development and current state.
Springer New York.
Brenner, S. C. and Scott, R. (2008). The mathematical theory of finite element methods, volume 15. Springer.
Cattaneo, L. and Zunino, P. (2013). Computational models for fluid exchange between microcirculation and tissue interstitium. Networks and Heterogeneous Media.
Chapman, S., Shipley, R., and Jawad, R. (2008). Multiscale modeling of fluid transport in tumors.
Bulletin of Mathematical Biology, 70(8):2334–2357.
Darcy, H. (1856). Les fontaines publiques de la ville de Dijon.
Discacciati, M. (2005). Iterative methods for Stokes/Darcy coupling. In Barth, T., Griebel, M.,
Keyes, D., Nieminen, R., Roose, D., Schlick, T., Kornhuber, R., Hoppe, R., Périaux, J., Pironneau, O., Widlund, O., and Xu, J., editors, Domain Decomposition Methods in Science and
Engineering, volume 40 of Lecture Notes in Computational Science and Engineering, pages 563–
570. Springer Berlin Heidelberg.
76
Discacciati, M. and Quarteroni, A. (2009). Navier-Stokes/Darcy coupling: modeling, analysis, and
numerical approximation. Revista Matematica Complutense, 22(2):315–426.
Discacciati, M., Quarteroni, A., and Valli, A. (2007). Robin-Robin domain decomposition methods
for the Stokes-Darcy coupling. SIAM Journal on Numerical Analysis, 45(3):1246–1268.
D’Angelo, C. (2007). Multiscale modelling of metabolism and transport phenomena in living tissues.
Bibliotheque de l’EPFL, Lausanne.
Ehlers, W. and Bluhm, J. (2002). Porous media: theory, experiments and numerical applications.
Springer.
Ehlers, W. and Blum, J. (2002). Porous media: theory, experiments and numerical applications,
chapter Foundations of multiphasic and porous materials, pages 3–86. Berlin: Springer-Verlag.
Ehlers, W., Ellsiepen, P., Blome, P., Mahnkopf, D., and Markert, B. (1997). Theoretische und
numerische Studien zur Lösung von Rand-und Anfangswertproblemen in der Theorie poröser
Medien. Abschlußbericht zum DFG-Forschungsvorhaben Eh, 107:6–2.
Ehlers, W. and Wagner, A. (2013). Multi-component modelling of human brain tissue: a contribution to the constitutive and computational description of deformation, flow and diffusion processes
with application to the invasive drug-delivery problem. Computer methods in biomechanics and
biomedical engineering, (ahead-of-print):1–19.
Epshteyn, Y. and Rivière, B. (2007). Estimation of penalty parameters for symmetric interior
penalty Galerkin methods. Journal of Computational and Applied Mathematics, 206(2):843 –
872.
Erbertseder, K. M. (2012). A multi-scale model for describing cancer-therapeutic transport in the
human lung. PhD thesis, University of Stuttgart.
Formaggia, L., Quarteroni, A. M., and Veneziani, A. (2009a). Cardiovascular mathematics. Number
CMCS-BOOK-2009-001. Springer.
Formaggia, L., Quarteroni, A. M., and Veneziani, A. (2009b). Cardiovascular mathematics, pages
22–24. Number CMCS-BOOK-2009-001. Springer.
Fortin, M. and Brezzi, F. (1991). Mixed and hybrid finite element methods. Springer.
Hall, J. E. (2010). Guyton and Hall Textbook of Medical Physiology: Enhanced E-book, chapter 16.
Elsevier Health Sciences.
Hassanizadeh, M. and Gray, W. G. (1979). General conservation equations for multi-phase systems:
1. Averaging procedure. Advances in Water Resources, 2:131–144.
77
Helmig, R., Flemisch, B., Wolff, M., Ebigbo, A., and Class, H. (2013). Model coupling for multiphase flow in porous media. Advances in Water Resources, 51:52–66.
Ischinger, F. (2013).
Modeling transvascular exchanges of therapeutic agents - sensitivity
analysis. http://www.hydrosys.uni-stuttgart.de/institut/hydrosys/publikationen/
paper/2013/ProjektArbeit˙FelixIschinger˙2013.pdf. Independent Study, University of
Stuttgart.
Jain, R. (1987). Transport of molecules across tumor vasculature. Cancer and Metastasis Reviews,
6(4):559–593.
Ju, Y., McLeland, J., and Toedebusch, C. (2013). Sleep quality and preclinical alzheimer disease.
JAMA Neurology, 70(5):587–593.
Knabner, P. and Angermann, L. (2000). Numerik partieller Differentialgleichungen: eine anwendungsorientierte Einführung, page 121ff.
Larson, M. G. and Bengzon, F. (2013). The Finite Element Method: Theory, Implementation, and
Applications: Theory, Implementation, and Applications, volume 10. Springer.
Logg, A., Mardal, K.-A., and Wells, G. (2012a). Automated solution of differential equations by
the finite element method: The fenics book, volume 84. Springer.
Logg, A., Wells, G. N., and Hake, J. (2012b). DOLFIN: A C++/Python finite element library.
Springer.
Markert, B. (2005). Porous media viscoelasticity with application to polymeric foams. PhD thesis,
University of Stuttgart.
Massing, A. (2012). Analysis and implementation of finite element methods on overlapping and
fictitious domains. PhD thesis, University of Oslo.
Massing, A., Larson, M. G., and Logg, A. (2013). Efficient implementation of finite element
methods on nonmatching and overlapping meshes in three dimensions. SIAM Journal on Scientific
Computing, 35(1):C23–C47.
Massing, A., Larson, M. G., Logg, A., and Rognes, M. E. (2014). A stabilized Nitsche overlapping
mesh method for the Stokes problem. Numerische Mathematik, pages 1–29.
Mikelic, A. and Jäger, W. (2000). On the interface boundary condition of Beavers, Joseph, and
Saffman. SIAM Journal on Applied Mathematics, 60(4):1111–1127.
Nitsche, J. (1971). Über ein Variationsprinzip zur Lösung von Dirichlet-Problemen bei Verwendung von Teilräumen, die keinen Randbedingungen unterworfen sind. Abhandlungen aus dem
Mathematischen Seminar der Universität Hamburg, 36(1):9–15.
78
Quarteroni, A. and Formaggia, L. (2004). Mathematical modelling and numerical simulation of the
cardiovascular system. Handbook of numerical analysis, 12:3–127.
Rivière, B. (2008). Discontinuous Galerkin methods for solving elliptic and parabolic equations:
theory and implementation. Society for Industrial and Applied Mathematics.
Rivière, B. and Yotov, I. (2005). Locally conservative coupling of Stokes and Darcy flows. SIAM
Journal on Numerical Analysis, 42(5):1959–1977.
Saffman, P. G. (1971). Boundary condition at surface of a porous medium. Studies in Applied
Mathematics, 50(2):93.
Secomb, T. W., Hsu, R., Park, E. Y., and Dewhirst, M. W. (2004). Green’s function methods for
analysis of oxygen delivery to tissue by microvascular networks. Annals of Biomedical Engineering,
32(11):1519–1529.
Sun, Q. and Wu, G. X. (2013). Coupled finite difference and boundary element methods for fluid
flow through a vessel with multibranches in tumours. International journal for numerical methods
in biomedical engineering, 29(3):309—331.
Truesdell, C. (1984). Thermodynamics of diffusion. In Rational thermodynamics, pages 219–236.
Springer.
Wang, J., Wang, Y., and Ye, X. (2009). A robust numerical method for Stokes equations based
on divergence-free H(div) finite element methods.
31(4):2784–2802.
79
SIAM Journal on Scientific Computing,
Appendix: Programming code
The working procedure in FEniCS was outlined in Chapter 6. The code used to produce the results
of this thesis is available under https://bitbucket.org/timokoch/koch2014˙masterthesis.
The requirements to execute are FEniCS 1.4 (http://fenicsproject.org/) configured with the
MUMPS solver library (http://mumps.enseeiht.fr/).
80