y Bruno Nkuiya and Christopher Costello University of California, Santa Barbara January 2014
advertisement

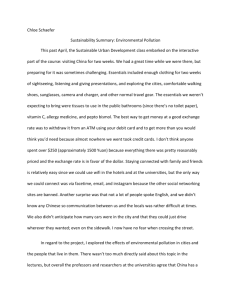
Pollution control under a possible shift in system capacity1 Bruno Nkuiya and Christopher Costello University of California, Santa Barbara January 2014 1 Address for correspondence: Donald Bren School of Environmental Science & Management, 2400 Bren Hall, University of California, Santa Barbara CA 93106. Abstract Pollution control under a possible shift in system capacity We derive the optimal management of a system that is subject to an abrupt and irreversible downward shift of its natural capacity at an unknown date. We model the shift with a hazard function, which may depend on emissions decisions and focus on how the possibility of a shift affects emission patterns. In contrast to the related literature, we find conditions under which the threat of regime shift induces greater emissions. This result is maintained under a catastrophic regime shift case. JEL classification: C61; C73; D81; Q54 Keywords: Pollution stock; Regime shift; Abrupt event; Dynamic analysis; Uncertainty 1 Introduction Humans derive massive value from hundreds of ecosystem services around the world: Oceans produce fish, soils produce agricultural crops, the atmosphere maintains temperature and protects us from harmful radiation, and biodiversity increases system resilience. When these ecosystems are robust, they improve human welfare - they facilitate greater production and consumption of goods and services, and consequently give rise to greater utility. Often this “system capacity” is considered exogenous and constant. This paper takes as a starting point that there are many instances in which system capacity may be subject to abrupt change, either due to exogenous or endogenous forces, that would lower the system capacity. Such an abrupt change usually starts at some tipping point or once a threshold is surpassed. While the crossing of a threshold may have important environmental consequences in their own right, we will focus instead on the economic significance: The benefits derived from resource use after the threshold is crossed. Consider the example of climate change. It is documented that gradual atmospheric concentration of greenhouse gases speeds up the global warming process. Once an uncertain threshold of greenhouse gas concentration is exceeded, such a process may trigger a new regime characterized for instance by a reduction in agricultural productivity, water scarcity, or a decline in water quality (see, IPCC, 2007; Backlund et al., 2008; U.S. Climate Change Science Program, 2009). Other wellstudied examples of possible shifts in system capacity include ocean acidification, shallow-lake eutrophication, and algal dominated coral reefs. These are just a few examples of regime shifts that could entail a decline in benefits from polluting. While a small literature addresses pollution control with a smooth concave benefit function (see for example, Long, 1992; van der Ploeg and de Zeeuw, 1992; Dockner and Long, 1993), examine optimal pollution control with abrupt changes in system capacity has not been tackled. The purpose of this paper is to examine the optimal management of a system with a possible regime shift in system capacity. To illustrate our point, we focus on a pollution control problem. However, our framework may be applied to the management of various resources for which player actions affect the probability of regime shift. Interesting examples include the management of a resource with trade regime shift, the use of the resource of antibiotic efficacy to produce antibiotics with bacterial resistance regime shift, resource extraction with demographic regime shift, and resource extraction with a possible civil war. An interesting and growing literature examines the control of pollution under various assumptions about the nature of the shift. In a game theoretic setting, Nkuiya et al. (2014) show that countries are more likely to ratify a climate treaty today when they face endogenous uncertainty about a possible upward shift in their future environmental damages. In that paper, the shift is captured by a positive probability that is not decreasing in the current pollution stock. Other authors have focused on a shift that is triggered when an uncertain pollution stock Tsur and Zemel (1996) or flow Groeneveld et al. (2013) is crossed. Alternatively, the regime shift can be modeled using the hazard function approach (see for example, Heal, 1984; Clarke and Reed, 1994; Tsur and Zemel, 1998; Gjerde et al., 1999; Haurie and Moresino, 2006; Nkuiya, 2011; de Zeeuw and Zemel, 2012); we adopt a version of this approach.1 Modeling a shift phenomenon that is controlled by a hazard function allows us to transform our stochastic regime-shift model in a deterministic optimal control problem, so we employ standard methods. In our model economic agents derive benefits from consumption or production activity. Pollution is a by-product of economic activity and can accumulate over time. In addition to inflicting environmental damages, the pollution stock may also trigger a regime shift that reduces the future benefits of polluting. More specifically, a downward shift in the benefit function may occur with a positive probability via the hazard rate. We examine both exogenous and endogenous 1 Using the hazard function method, Polasky et al. (2011) examine the optimal management of a renewable resource under a potential dangerous shift in the resource growth. 2 hazard rates. In the exogenous case, the likelihood of regime shift does not depend on the pollution stock (or flow). In the endogenous risk case, a higher pollution stock increases the likelihood of the regime shift. A central question is: How does this type of uncertainty affect optimal emissions? In the case of endogenous regime shift, it is always optimal to reduce emissions in order to reduce the exposure to risk? To address these and related questions, we begin with a baseline no-shift case in which a regime shift never occurs. Then, introducing the possibility of a shift, we identify two opposite channels through which uncertainty about the regime shift can affect the optimal emissions policy. The first channel is the direct effect of pollution on welfare: higher emissions increases the benefit of polluting and thus has a positive effect on welfare. This channel raises the incentive to pollute. But, by increasing emissions, the pollution stock is increased which in turn raises environmental damages and (in the endogenous risk case) increases the likelihood of regime shift. This second channel tends to reduce the incentive to pollute as it lowers welfare. In constructing our argument we examine the benchmark scenario in which pollution inflicts no environmental damage but there is a possibility of a regime shift that lowers system capacity. There, when regime shift risk is exogenous, the second channel vanishes, so the threat of regime shift does not affect emissions decisions. In the endogenous risk case, while both channels are present, the former turns out to always dominate the latter, so the threat of regime shift leads to lower emissions. To better understand the pure effect of uncertainty, we also investigate the case in which pollution entails environmental damages. In this context, we characterize conditions under which the threat of regime shift increases emissions. The upcoming Section 2 presents the model. Section 3 derives optimal emissions associated to the deterministic-shift and no-shift cases. Section 4 and Section 5 examine the implications of uncertainty about the transition date on results obtained in Section 3 within a regime shift 3 context and a catastrophic post-event case, respectively. Section 6 concludes. 2 The model Consider a system in which production and consumption activities entail pollution emissions. Denote by q(t) the emissions level and z(t) the pollution stock at date t. We assume that current emissions contribute to the evolution of the pollution stock according to the kinematic equation ż(t) = q(t) − ρz(t), z(0) = z0 , (1) where ρ represents the natural decay. Pollution is a public bad, which inflicts environmental damages on the system. The damage function at date t is D(z(t)), which is increasing and convex, with D(0) = 0. The direct benefit of polluting at date t is captured by the benefit function U (q(t)) = aq(t) − 1 (q(t))2 , 2b (2) where a > 0 is parameter and b is a random variable that can take one of the two values bh > bl > 0. Figure 1 illustrates the payoff function U (·) for b = bl and b = bh which captures the idea that b=b h b=b U(q) l 0 q Figure 1: Effect of a regime shift on the gross benefit function U . 4 the direct benefit of any level of pollution is greater in the “bh regime” than in the “bl regime.” Moreover, in any regime, polluting at level q = ab maximizes the instantaneous benefit, so U (ab) represents the maximum benefit that can be sustained by the system. Consequently, we say the system capacity associated with b = bh is greater than the one associated with b = bl ; we loosely refer to b = bh or b = bl as the “system capacity.” We assume that at the initial date, the system capacity is maximal, so b = bh . However, at some positive date τ (that can be infinite), a regime shift occurs. This shift is sudden and irreversible and henceforth the system will have low capacity, so b = bl . The unknown switch date τ may be exogenous or may depend on the pollution stock level. The transition to low capacity is governed by the hazard function λ(·), which is positive and may be increasing in the current pollution stock.2 Since the shift in the system capacity arises at date τ > 0, the benefit function is characterized by b = bh for t < τ and by b = bl for t ≥ τ . The present value of welfare, which incorporates the benefits of pollution, the damages from the pollution stock, and the shift in capacity, is given by: Z τ exp(−rt)[U (q(t)) − D(z(t))]dt + exp(−rτ )V (z(τ )), 0 where r is the discount rate and V (·) represents the value function of the post-event problem.3 Given the particular structure of the welfare function, we first solve for the certainty case and will employ that solution to completely characterized the full model outcome. 2 In what follows, we examine separately the case where λ(·) is constant and the one where λ(·) depends on the current pollution stock. 3 That is, V (z(τ )) is the present value, at time τ , of the discounted stream of utility from optimally utilizing the system given starting pollution stock z(τ ) in the low capacity regime. 5 3 The certainty case In this section, we assume that the shift date τ is know with certainty and zτ is the pollution stock at date τ . The post-event value function associated with this problem is given by Z V (zτ ) = max q(·) τ +∞ 1 2 exp(−r(t − τ )) aq(t) − (q(t)) − D(z(t)) dt, 2bl (3) subject to (1) with z(τ ) = zτ . The Hamiltonian associated with this optimal control problem is H(q, z, η) = aq − 1 (q)2 − D(z) + η(q − ρz), 2bl from which we derive q ∂H (q, z, η) = a − + η. ∂q bl The choice of optimal emissions maximizes the Hamiltonian and therefore satisfies a− q ≤ −η, bl [a − q + η]q = 0, bl and q ≥ 0. For simplicity we henceforth restrict attention to interior solutions. In this case, q > 0 such that at the optimum, we necessarily have a − q/bl = −η. This condition shows that the optimal emissions level equates the marginal benefit to the marginal social cost of polluting. The optimality conditions also include η̇−(r+ρ)η = D0 (z), along with (1) and the transversality condition lim exp(−rt)z(t)η(t) = 0. t→+∞ At the steady state, we have η̇ = ż = 0. Given this result, eliminating η in the optimality conditions above and rearranging leads us to a−ρ z = D0 (z)/(r + ρ). bl 6 (4) The unique positive root of this equation denoted by ẑ represents the steady-state pollution stock associated with the low capacity regime. Condition (4) says that, at the steady state, the marginal benefit of polluting is equal to the present value of the stream of marginal damage caused by the additional pollution generated. A common assumption is that damage is quadratic in the pollution stock. In that special case, where D(z) = γ 2 z , 2 (5) condition 4 implies that the steady-state pollution stock is ẑ = a(r + ρ) . γ + ρ(r + ρ)/bl (6) In addition, we verify in the appendix that the post-event value function is V (zτ ) = − u1 2 z − u2 zτ + u3 , 2 τ (7) where the coefficients u1 , u2 , and u3 are simple explicit expressions of model parameters.4 In that case, the pollution stock and emissions level at date t ≥ τ are given by z(t) = (zτ − ẑ) exp(−(ρ + u1 bl )(t − τ )) + ẑ, and q(t) = bl [a − u2 − u1 z(t)]. These findings are extremely useful because they provide explicit, time-dependent results for the optimal post-event policy; they tell us exactly how the planner will optimally respond following a shift in system capacity and what the effects will be on the pollution stock and on welfare. 4 u1 =[−(r + 2ρ)/bl + au1 u2 = , u1 + (r + ρ)/bl q 4γ/bl + (r + 2ρ)2 /b2l ]/2, u3 =bl [a2 − 2au2 + u22 ]/2r. 7 The above analysis assumes a shift at known date τ to the low capacity state bl . Another useful benchmark is the case in which the shift never occurs. The solution to that problem can be obtained from the case where the shift date is certain by replacing: bl by bh , τ by 0, and zτ by z0 . We have so far characterized analytically the optimal emissions policy for the no-shift case and that of the scenario where the shift date τ is perfectly predictable. This will serve as a starting point for examining the effect of uncertainty about τ , to which we now turn. 4 The uncertainty case Under uncertainty about τ , the survival function expresses the probability that system capacity Rt has not switched by date t, and is given by S(t) = exp(− 0 λ(z(s))ds. Therefore, the density function of the random variable τ is S(t)λ(z(t)). The socially optimal policy consists of choosing the emissions time path q(·) to maximize the expected discounted net benefit +∞ Z Z λ(z(τ )) exp(− 0 τ Z λ(z(s))ds τ exp(−rt)[U (q(t)) − D(z(t))]dt + exp(−rτ )V (z(τ )) dτ. 0 0 subject to (1). Integrating by parts, the objective function can be rewritten as Z +∞ 0 where P (t) = 4.1 Rt 0 1 2 q(t) − D(z(t)) + λ(z(t))V (z(t)) dt, exp(−(rt + P (t))) aq(t) − 2bh λ(z(s))ds is the accumulated hazard, which satisfies Ṗ (t) = λ(z(t)) and P (0) = 0. The exogenous hazard case In this section, we assume that λ(z(t)) = β, so the likelihood of regime shift is independent of the pollution stock. In this case, P (t) = tβ and the objective function simplifies to Z +∞ exp(−(r + β)t)[aq(t) − 0 1 q(t)2 − D(z(t)) + βV (z(t))]dt. 2bh 8 The optimal emissions path is the outcome of the maximization of this objective function subject to (1) with V (z(t)) given by (3). The Hamiltonian for this optimal control problem is Hex = aq(t) − 1 q(t)2 − D(z(t)) + βV (z(t)) + ν(q − ρz), 2bh where the subscript “ex” stands for “exogenous” hazard. Optimality conditions imply a− q + ν = 0, bh ν̇ − (r + β + ρ)ν = D0 (z) − βV 0 (z), lim z(t)ν(t) exp (−t(r + β)) = 0. t→+∞ These calculations allow us to derive the following results. Proposition 1 If pollution entails no environmental damage (D = 0), then the pre-event emissions level (in both the threat and no-threat cases) is: q ∗ = abh , which is time independent. The intuition underlying Proposition 1 is simply that when pollution causes no environmental damage, and when the shift is independent of pollution, then the stock of pollution plays no role in decision making so the pre-event emissions are always at the optimal level q ∗ = abh whether or not there is a threat of regime shift. In the case in which the pollution stock causes damage, we can use methods similar to those above to analyze the steady state pollution stock. At the steady state, ż = ν̇ = 0, and it is straightforward to show that the steady-state pollution stock (denoted by zex ) is the unique positive root of the equation a−ρ 1 zex = [D0 (zex ) − βV 0 (zex )]. bh r+β+ρ 9 (8) Proposition 2 If the damage function is given by (5) then: (i) The pre-event steady-state pollution stock obtained under uncertainty about the shift is z̃ex = a(r + β + ρ) − βu2 , and γ + βu1 + ρ(r + β + ρ)/bh (9) (ii) it is greater than the steady-state pollution stock of the no-shift case if and only if the benefit parameter bh satisfies bh > b ≡ bl ρu1 /[γ − u1 (u1 bl + r + ρ)]. Proof. See the appendix. Proposition 2 suggests a somewhat counterintuitive result: Introducing a possible regime shift may trigger an increase in pre-event emissions. The economic intuition behind this result is as follows. When the system capacity of the high regime is large, one unit of pollution generates a very large benefit as compared to what would be obtained from the low regime capacity that could prevail in the future. Anticipating this, the incentive to emit early in the program increases. Proposition 2 also shows that the opposite result can hold: as long as the regime shift will not cause too great a drop in system capacity, it is optimal to reduce emissions in anticipation of a possible regime shift. 4.2 The endogenous hazard case Thus far we have restricted attention to the exogenous hazard case. While this may be appropriate for some natural systems, many contemporary policy questions concern possible endogenous hazards, i.e. cases in which the hazard rate itself depends on the stock of pollution.5 Using an endogenous hazard rate we revisit the results obtained in previous sections. In contrast to the exogenous hazard case, we must now take into account the evolution of the accumulated hazard 5 For example, the likelihood and timing of a possible reversal of the jet stream almost surely depends on the aggregate carbon stock. 10 (Clarke and Reed, 1994). The optimal emissions path solves the optimization problem Z +∞ 1 max exp(−(rt + P (t)))[aq(t) − q(t)2 − D(z(t)) + λ(z(t))V (z(t))]dt, q(·) 2b h 0 subject to (1), Ṗ (t) = λ(z(t)), P (0) = 0, where V (z(t)) is given by (7). The current Hamiltonian for this optimal control problem is 1 2 Hend = exp(−P (t)) aq(t) − q(t) − D(z(t)) + λ(z(t))V (z(t)) + x(q − ρz) + yλ(z(t)), 2bh where the subscript “end” refers to an “endogenous” hazard, x and y are costate variables associated with z and P , respectively. The optimality conditions are exp(−P )[a − q ] + x = 0, bh (10) ẋ − (r + ρ)x = exp(−P )[D0 (z) − λ0 (z)V (z) − λ(z)V 0 (z)] − yλ0 (z), 1 2 ẏ − ry = exp(−P ) aq − q − D(z) + λ(z)V (z) , 2bh (11) (12) along with (1) and the transversality conditions lim exp(−rt)P (t)y(t) = lim exp(−rt)z(t)x(t) = 0. t→+∞ t→+∞ Setting g = exp(P )y and substituting g in conditions (10), (11), and (12), algebraical manipulation results in: q̇ = −(r + ρ + λ(z))(a − q )bh + [D0 (z) − λ0 (z)V (z) − λ(z)V 0 (z)]bh − gλ0 (z)bh , bh ż = q − ρz, ġ = (r + λ(z))g + aq − (13) (14) 1 2 q − D(z) + λ(z)V (z). 2bh This gives rise to our next result: 11 (15) Proposition 3 If pollution causes no direct damage (D = 0), then the optimal pre-event emissions are (i) time dependent and (ii) lower than in the no-threat case. Proof. See the appendix. Proposition 3 suggests that results obtained in Proposition 1 no longer hold when the hazard function depends on the pollution stock. The rationale is that the force identified above that tends to reduce emissions no longer vanishes (in contrast to the case where the threat is exogenous) even if pollution does not directly entail environmental damages. Even if pollution does not cause damage, welfare is still higher in the bh regime. Since the threat of regime shift increases in the pollution stock, the optimal action is to emit less pollution prior to regime shift than in the exogenous threat case. It is also possible to derive an implicit expression for the steady state pollution stock when damage is positive and the hazard is endogenous. Denoting this “endogenous hazard” pollution stock by zend , we find: zend )(r + ρ + λ(zend )) − D0 (zend ) = −[λ0 (zend )V (zend ) + λ(zend )V 0 (zend )]+ bh λ0 (zend ) (ρzend )2 [aρzend − − D(zend ) + λ(zend )V (zend )]. (r + λ(zend )) 2bh (a − ρ (16) This is derived by noting that q̇ = ż = ġ = 0, substituting (1) and (10) into (13), and rearranging. Indeed, the no shift case falls out as a special case of (16) by imposing the restriction λ(·) = 0. The no-shift steady state (z̃) is the solution to (a − ρ z̃ )(r + ρ) − D0 (z̃) = 0 bh (17) The terms in (16) that do not appear in (17) (i.e. those that are multiplied by λ(z) or λ0 (z)) capture the effect of the threat of regime shift. There are two opposite forces that drive emissions 12 decisions. A marginal increase in emissions increases utility, which in turn increases welfare. This force raises the incentive to pollute. On the other hand, a marginal increase in emissions raises the pollution stock, which in turn increases the cost of polluting: it raises environmental damage and accelerates the occurrence of the regime of low capacity that harms welfare. This force tends to reduces the incentive to pollute. Which force outweighs the other turns out to depend on the model parameters and the hazard function. We formally address this issue below. The left-hand side of (17) is decreasing in z̃. Therefore, the steady-state pollution stock obtained under the endogenous hazard case (zend ) is greater than that of the no-shift case (z̃) if and only if the marginal dependence of the hazard rate on the equilibrium pollution stock is small, i.e., λ0 (zend ) zend 1 (ρzend )2 − D(zend ) − rV (zend )] < a − ρ + V 0 (zend ). [aρzend − λ(zend )(r + λ(zend )) 2bh bh (18) For completeness, we next compare the results obtained under the threat of exogenous and endogenous shift in system capacity. The threat of the exogenous regime shift leads to a greater steady-state pollution stock as compared to the threat of endogenous regime shift case if and only if the steady-state pollution stock obtained under the endogenous case zend satisfies 1 λ0 (zend ) [aρzend − (ρzend )2 −D(zend ) − rV (zend )] > (r + λ(zend )) 2bh ρ (λ(zend ) − β)[(a − zend ) + V 0 (zend )]. bh The rationale is that when this inequality holds, the marginal dependence of the hazard rate on the optimal pollution stock is relatively large. This force induces lower incentives to emit as compared to the constant hazard rate case. 13 5 Dramatic regime shift Thus far we have restricted attention to the case in which regime shift lowers, but does not eliminate, system capacity. In this section, we extend the analysis under a threat of catastrophic shift in system capacity, i.e. where low capacity approaches zero (bl → 0). For completeness, as in the existing literature (see for instance, Clarke and Reed, 1994; Tsur and Zemel, 1998; de Zeeuw and Zemel, 2012), we also examine the scenario in which the abrupt shift in system capacity leads to a “doomsday event” characterized by a complete loss of value. The difference between these two approaches to dramatic regime shift is as follows: The “catastrophic shift” entails a loss in productive capacity but the value function of the post event problem is stock dependent. The “doomsday event” leads to a stock collapse such that the post event value function does not depend on the pollution stock. These cases are examined in turn below. Except for the fact that V should be recalculated depending on the type of regime shift, the optimum defined by conditions (1), (13), and (15) remains valid in this section. In particular, given the post-event value function V associated with dramatic regime shift, the exogenous and endogenous hazard rates lead to the pre-regime shift steady-state pollution stocks defined by (8) and (16), respectively. 5.1 Catastrophic capacity shift Adopting the quadratic damage function given by (5), we first note that the possibility of a catastrophic shift in system capacity induces emissions reduction and generates zero emissions as the optimal post-event policy. This is easily confirmed by inspecting Equation (4) whose left hand side goes to minus infinity as bl → 0 while its right-hand side is equal or greater than zero. Notice that catastrophic capacity loss implies that u1 , u2 , u3 and V (z) go to γ/(r + 2ρ), 0, 0, and −γz 2 /2(r + 2ρ), respectively. Therefore, (9) suggests that the limit of the steady state 14 pollution stock (with an exogenous hazard) as bl → 0 is: `(β) ≡ lim z̃ex = bl →0 a(r + β + ρ) > 0. [γ(r + β + 2ρ) + ρ(r + β + ρ)/bh ] This result implies that even if the magnitude of the shift is sufficiently large (i.e. as bl → 0), the zero emissions rule identified under the post-event phase may not arise as a pre-event policy. An interesting consequence is that ∂`/∂β > 0; the larger is the (constant) threat of catastrophic collapse, the larger is the pollution stock, and the threat of the catastrophic shift always induces greater emissions compared to the no-threat case. In the case where the hazard rate depends on emissions decisions, the above calculations along with (16) suggest that a positive emissions policy arises. In addition, the threat of the catastrophic regime shift may actually affect the pre-event emissions policy differently, this is in comparison with the post event and the exogenous hazard cases. More precisely, our analysis suggests that the pollution stock obtained under the threat of the catastrophic shift is lower than the no-shift level but only when the marginal dependence of the hazard on the pollution stock at the optimum satisfies: 2 (ρzend )2 ρ λ0 (zend ) rγzend γ [aρzend − ]>a−[ + ]zend . − D(zend ) + λ(zend )(r + λ(zend )) 2bh 2(r + 2ρ) bh r + 2ρ 5.2 (19) Doomsday A scenario even more pessimistic than catastrophic collapse is “doomsday,” in which the abrupt occurrence of the shift in system capacity results in a stock collapse and a complete loss of welfare. This can be modeled by setting V = 0 (or equivalently u1 = u2 = u3 = 0) in the post-event problem. We verify in the appendix that the threat of the doomsday scenario always increases pre-event emissions when the hazard rate is exogenous. The rationale is that in such a case, the hazard rate adds to the discount rate, increasing impatience such that the incentive to emit 15 increases. In the case where the hazard rate endogenously depends on emissions decisions, our derivations reveal that the threat of the doomsday event will reduce emissions if and only if the steady-state optimal pollution stock zend verifies λ0 (zend ) (ρzend )2 ρ [aρzend − − D(zend )] > a − zend . λ(zend )(r + λ(zend )) 2bh bh (20) This result is driven by the fact that the marginal hazard rate evaluated at the optimal pollution stock is large when condition (20) is satisfied. As such, incentives to emit are lower (as compared to the no-shift case) because an increase in emissions within this context would hasten the shift to the dangerous regime. 5.3 Summary of Results The central focus of this paper has been on the pre-event optimal emissions when facing a possible decline in future system capacity. We have distinguished between endogenous risk cases (in which the threat of regime shift depends positively on the pollution stock) and exogenous risk cases (in which the threat is exogenous). We found it illuminating to also distinguish between cases in which pollution causes direct damage and cases in which pollution was benign (but may still affect the chance of regime shift). Finally, we examined three types of regime shift: moderate, catastrophic (which still entailed some post-event utility), and doomsday (where all utility was lost). This produces a total of 12 scenarios the results of which are summarized in Table 1. When the hazard rate is endogenous, in all the cases studied, the threat of regime shift reduces pre-event emissions if the marginal dependence of the hazard function to the optimal pollution stock is sufficiently large. In this case, cautious behavior (reduced pre-shift emissions) is optimal because an increase in emissions would hasten the shift to the dangerous regime. However, when the marginal dependence of the hazard function to the optimal pollution stock is sufficiently small, it may be may optimal to increase emissions in response to the threat, depending on the damage and 16 benefit functions, the natural decay, and the discount rate. Interestingly, when the hazard rate is exogenously given, our analysis suggests that it is optimal to increase emissions in response to the threat of regime shift when the initial regime capacity is large enough and pollution is harmful. Table 1: Effects of the threat on pre-shift emissions Damages Type of threat Exogenous risk Endogenous risk Regime shift No effect D=0 Catastrophic shift No effect Doomsday No effect Regime shift ± ± D>0 Catastrophic shift + ± Doomsday + ± We have modeled regime shift as a decrease in system capacity. This form of regime shift has the properties that: (1) it lowers the maximum level of pollution at which we retain positive utility, (2) it reduces the maximum possible utility from polluting, and (3) the marginal utility of pollution at zero is unaffected by regime shift. A different (though still reasonable) model would preserve properties (1) and (2), but would allow marginal utility (at zero) to also be affected by regime shift. To examine the consequences of this alternative characterization of regime shift, we examine the robustness of the above results under a benefit function of the form: B(q) = θq − 1 2 q 2v for all q ≥ 0, (21) where v > 0. Here, the parameter θ is susceptible to regime shift and can either take the value θh or θl , with θh > θl > 0. The high capacity regime is characterized by θ = θh and the low capacity regime is represented by θ = θl . The main feature of this benefit function is that the difference in the benefit of polluting across the regimes is larger at the neighborhood of q = 0 as illustrated in Figure 2.6 In this context, our analysis yields qualitatively the same results as compared to those obtained with the gross benefit function (2). 6 As illustrated in Figure 1, this features is not captured by the gross benefit function defined in (2). 17 6 Conclusion and remarks This paper has examined how the prospect of an abrupt downward shift in system capacity at an unknown date affects optimal emissions decisions. To do this, we first examined the no-shift case where there was no possibility of occurrence of such a shift. We then allowed the date of occurrence of the shift to be driven by a hazard rate. Our analysis suggests that uncertainty significantly affects the optimal emissions policy. A useful benchmark is the case in which the hazard rate is exogenous and pollution inflicts no direct environmental damage. In that case we find that the threat does not affect emissions decisions. But when the threat of regime shift depends positively on pollution (still assuming damage is zero), pre-event emissions are always reduced by the threat. To date the literature on regime shifts and pollution control has mainly focused on discrete jumps in damage (e.g., Tsur and Zemel, 1998; de Zeeuw and Zemel, 2012). For that class of problems, using the optimal control framework, previous authors have found that the threat of an upward shift in environmental damages always induces more prudent behavior by sustaining lower emissions.7 Moreover, when the magnitude of the shift is sufficiently large, the threat of regime shift induces extreme prudence by sustaining only a zero emissions policy. In this paper, we address a different class of problems under which the regime shift entails a drop in system capacity. Under this new (and yet unexplored) setting, we also use the optimal control framework and reach qualitatively different conclusions. We find that when the early system capacity is sufficiently large, uncertainty about the possible downward shift in such a system capacity may lead to greater pre-event emissions. Even if the magnitude of the shift is sufficiently large, we find the possibility of an increase in pre-event emissions. Using climate change as an illustration, a possible implication of our results is that there may be a theoretically-grounded economic incentive 7 Polasky et al. (2011) use the optimal control approach to address the management of a renewable resource under the threat of a sudden increase of another type of damage. They also find that the threat of regime shift entails a prudent behavior by leading a lower harvest. 18 for increasing emissions today if the system capacity is expected to decline markedly in the future. The approach taken here, and the findings that follow, contribute to an emerging policy-relevant, and theoretically attractive literature on optimal environmental management in a changing and uncertain world. 19 A a=aL U(q) a=aH 0 q Figure 2: Effect of a regime shift on the gross benefit function B defined in (21). Details for Section 3 The value function V associated to the optimization problem (3) satisfies rV (z) = max[aq − q 1 2 q − D(z) + (q − ρz)V 0 (z)]. 2bl (22) Notice that in what follows, the damage function is given in (5). For an interior solution, the first-order condition related to the maximization problem above can be written as q = bl [a + V 0 (z)]. Given the quadratic structure of (22), a plausible guess for the value function is V (z) = − u1 2 z − u2 z + u3 , 2 from which we derive V 0 (z) = −u1 z − u2 . Substituting the above equations into (22) (evaluate at 20 the optimum), and equating the coefficients of powers of z, we get u1 =[−(r + 2ρ)/bl ± u2 = q 4γ/bl + (r + 2ρ)2 /b2l ]/2, au1 , u1 + (r + ρ)/bl u3 =bl [a2 − 2au2 + u22 ]/2r. In order to sustain the converge of the system to its steady state, we consider only the positive value of u1 . Proof of Proposition 2 (i) The steady-state pollution stock z̃ex obtained under uncertainty about the shift is given in (8). For the case where the damage function is given by (5), from condition 8, we derive z̃ex = a(r + β + ρ) − βu2 . γ + βu1 + ρ(r + β + ρ)/bh (23) Therefore, the steady-state pollution stock ẑns associated to the no-shift case is given by ẑns = z̃ex |β=0 = a(r + ρ) . γ + ρ(r + ρ)/bh (24) (ii) Using the expression of u2 given above, we obtain that z̃ex > ẑns if and only if we have bh > b ≡ bl ρu1 /[γ − u1 (u1 bl + r + ρ)]. Proof of Proposition 3 (i) It suffices to show that there is no solution for equations 10, 11, and 12 consistent with a constant q. Assume by contradiction at the optimum, we have q(t) = q̄ for all t ≥ 0, where q̄ is a positive constant. Since D ≡ 0, we have V (z) = U (abh )/r, V 0 (z) = 0, and D0 (z) = 0. Substituting this result into (13) and rearranging, we obtain that g satisfies λ0 (z(t))g(t) = −λ0 (z(t))U (abh )/r − (r + ρ + λ(z(t))(a − q̄/bh ). 21 (25) Condition (15) suggests that function g should verify the differential equation ġ(t) = (r + λ(z(t)))g(t) + aq̄ − 1 2 q̄ + λ(z(t))U (abh )/r. 2bh (26) We find that function g implicitly defined in (25) does not satisfy the differential equation 26 when the hazard rate is stock dependent. This is a contradiction—–Hence, q is necessarily time dependent prior the shift in system capacity. (ii) By Proposition 1, the emissions level obtained under the no-threat case is maximal. As a result, emissions level obtained under the threat are necessarily lower as compared to the no-threat case. Proof of that the threat of the doomsday event always leads to greater emissions when the hazard rate is exogenous In this case, by setting u1 = u2 = u3 = 0 in the proof of Proposition 2, we obtain results associated with the doomsday setting. Hence, by (23) the steady-state pollution stock obtained under the threat of the doomsday event is given by z̃d = a(r + β + ρ) , γ + ρ(r + β + ρ)/bh which is clearly greater than the steady-state pollution stock of the no-threat case (given in (24)). Since at the steady state ż = q − ρz = 0, we have q = ρz. Therefore, the steady-state emissions level obtained under the threat is always greater than the one of the no-threat case. 22 References References Backlund, P., A., D., Janetos, J., Schimel, M., Hatfield, M., Ryan, S., Archer, and D., Lettenmaier (2008). The effects of climate change on agriculture, land resources, water resources, and biodiversity in the united states. Technical report, A Report by the U.S. Climate Change Science Program and the Subcommittee on Global Change Research, Washington, DC, USA. Clarke, H. R. and W. J. Reed (1994). Consumption/pollution tradeoffs in an environment vulnerable to pollution-related catastrophic collapse. Journal of Economic Dynamics and Control 18, 991-1010. de Zeeuw, A. and A. Zemel (2012). Regime shifts and uncertainty in pollution control. Journal of Economic Dynamics and Control 36, 939–950. Dockner, E. J. and N. V. Long (1993). International pollution control: Cooperative versus Noncooperative Strategies. Journal of Environmental Economics And Management 24, 13-29. Gjerde, J., S. Grepperud, and S. Kverndokk (1999). Optimal climate policy under the possibility of a catastrophe. Resource and Energy Economics 21, 289–317. Groeneveld, R. A., M. Springborn, and C. Costello (2013). Repeated experimentation to learn about a flow-pollutant threshold. Environmental and Resource Economics, forthcoming. Haurie, A. and F. Moresino (2006). A stochastic control model of economic growth with environmental disaster prevention. Automatica 42, 1417-1428. Heal, G. (1984). Interactions between economy and climate: a framework for policy design under uncertainty. Advances in Applied Micro-Economics 3, 151–168. 23 IPCC (2007). Climate change 2007 synthesis report: Summary for policymakers. http://www. ipcc.ch/pdf/assessment-report/ar4/syr/ar4_syr_spm.pdf. Long, N. V. (1992). Pollution control: A differential game approach. Annals of Operations Research 37, 283-296. Nkuiya, B. (2011). International emission strategies under the threat of a sudden jump in damages. Cahiers de recherche CREATE 2011-1. Nkuiya, B., W. Marrouch, and E. Bahel (2014). International environmental agreements under endogenous uncertainty. Journal of Public Economic Theory, forthcoming. Polasky, S., A. de Zeeuw, and F. Wagener (2011). Optimal management with potential regime shifts. Journal of Environmental Economics And Management 62, 229–240. Tsur, Y. and A. Zemel (1996). Accounting for global warming risks: resource management under event uncertainty. Journal of Economic Dynamics and Control 20, 1289–1305. Tsur, Y. and A. Zemel (1998). Pollution control in an uncertain environment. Journal of Economic Dynamics and Control 22, 961-975. U.S. Climate Change Science Program (2009). Thresholds of climate change in ecosystems. http: //downloads.climatescience.gov/sap/sap4-2/sap4-2-final-report-all.pdf. van der Ploeg, F. and A. J. de Zeeuw (1992). International aspects of pollution control. Environmental and Resource Economics 2, 117-139. 24