Document 10887225
advertisement

Phenomenology and Kinematics of Discrete Plastic Deformation Events in Amorphous
Silicon: Atomistic Simulation Using the Stillinger-Weber Potential
by
Michael J. Demkowicz
B.S., Physics (2000)
B.S., Aerospace Engineering (2000)
B.A., Plan II Honors (2000)
University of Texas at Austin
Submitted to the Department of Mechanical Engineering
in Partial Fulfillment of the Requirements for the Degree of
Master of Science in Mechanical Engineering
at the
Massachusetts Institute of Technology
February 2004
OF TECHNOLOGY
MSACHUSETTS INSTITUTE
JUL 2 0 2004
©2004 Massachusetts Institute of Technology
All rights reserved
LIBRARIES
Signature of Author.......
Department of Mechanical Engineering
, January 6, 2004
.....
Ali S. ~rgon
_Qfessor of Mechanical Engineering
Thesis Supervisor
C ertified by .........................................................................
. ....
Accepted by..................
Ain A. Sonin
Chairman, Department Committee on Graduate Students
1
BARKER
(-Kr
Nb.
14N7\
2
PHENOMENOLOGY AND KINEMATICS OF DISCRETE PLASTIC
DEFORMATION EVENTS IN AMORPHOUS SILICON:
ATOMISTIC SIMULATION USING THE STILLINGER-WEBER POTENTIAL
by
MICHAEL J. DEMKOWICZ
Submitted to the Department of Mechanical Engineering
on January 6, 2004 in partial fulfillment of the
requirements for the Degree of Master of Science in
Mechanical Engineering
ABSTRACT
The need to understand plastic deformation in amorphous covalently bonded materials
arose from the unique mechanical properties of disordered intergranular layers in ncTiN/a-Si 3N4 ceramic composites. Silicon was chosen as a model disordered network solid
for the purpose of conducting feasible atomistic computer simulations of plastic
deformation. Amorphous silicon structures were created by melting and quenching using
a molecular dynamics algorithm. These structured were plastically deformed by
conjugate gradient static energy minimization. Atomic level analysis was carried out
using appropriately generalized notions of stress and strain.
Plastic deformation was found to occur in a series of discrete stress relaxations, each one
of which was accompanied by a well localized atomic level rearrangement. The
transforming regions were roughly ellipsoidal in shape and involved the cooperative
motion 100-500 atoms spanning a length scale of 0.7-2.5nm. This length scale is large in
comparison to the typical thickness of disordered intergranular layers in nanocrystalline
ceramic composites, indicating that the plastic relaxation process in such intergranular
layers cannot be the same as the one found in bulk amorphous covalent solids.
Thesis Supervisor: Ali S. Argon
Title: Professor of Mechanical Engineering
3
4
Table of contents
Title page
1
Abstract
3
Table of contents
5
1. Introduction
7
2. Background
11
2.1 Deformation mechanisms in nanocrystalline metals
11
2.2 Grain boundary structure in nanocrystalline network solids
12
2.3 Deformation mechanisms in glassy metals and polymers
14
2.4 Why dislocations do not mediate plasticity in amorphous solids
17
2.5 Structure and rigidity of covalent network materials
19
21
3. Methods
3.1 Empirical potentials
21
3.2 Molecular dynamics (MD) simulation
27
3.3 Conjugate gradient static energy minimization (CGSEM) simulation
29
3.4 Analysis
32
3.4.1 Atomic stress
32
3.4.2 Atomic strain
34
3.4.3 Hydrostatic and deviatoric tensor components
36
4. Results
38
4.1 Creating a-Si
38
4.1.1 Initial condition: c-Si
39
4.1.2 Melting
40
4.1.3 Quenching
43
4.1.4 Structure characterization
44
4.2 Irreversible deformation: system view
47
4.2.1 Loading procedure
47
4.2.2 Discrete stress relaxation events
48
4.2.3 Deformation to large strain
50
5
4.3 Irreversible deformation: atomic view
52
4.3.1 Kinematics of transformation
52
4.3.2 Visualization of transformation
54
4.3.3. Analysis
56
5. Conclusions
60
6. Acknowledgements
61
7. References
62
6
1. Introduction
The motivation for undertaking an investigation of plastic deformation in
amorphous silicon came from the unique mechanical properties exhibited by nc-TiN/aSi 3N4 nanocrystalline covalently bonded ceramic composite materials produced by S.
Veprek and coworkers at the Technical University of Munich in Garching, Germany.
These materials are created as thin films by either plasma or chemical vapor deposition
techniques (PVD and CVD, respectively) have shown ultrahardness under
microindentation on the order of 70-100GPa, i.e. commensurate with the hardness found
in diamond films (Argon and Veprek [2002]). Additionally, these materials exhibit
excellent microstructure stability at high temperature: they only begin to recrystallize at
about 1300K.
The excellent mechanical behavior and thermal stability of these materials has
made them excellent candidates for application as coatings for high-speed, hightemperature machine tools. Indeed, they hold a significant advantage over carbon-based
coatings because the latter tend to dissolve easily into the substrate upon which they were
deposited if said substrate is iron-based (e.g. low carbon steel). Today, nc-(AlTi)N/aSi 3N4 composite ceramic coatings-whose structure is similar to the nc-TiN/a-Si 3N4
coatings that motivated this work-are commercially available through a joint venture
between PLATIT AG and SHM Ltd. 2.
Aside from their undeniable technological importance, nanocrystalline
TiN/amorphous Si 3N4 composite ceramic coatings pose a significant challenge to our
current understanding of the processes underlying mechanical behavior of covalently
bonded nanocrystalline materials. Polycrystalline metals with grain sizes on the order of
micrometers exhibit the well-known Hall-Petch effect: their strength increases with
decreasing grain size. Once the grain sizes reach 10-20 nanometer scales (Yip [1998]),
however, this trend is reversed and further decreases in grain size are accompanied by
decreases in material strength. Much like polycrystalline metals, nc-TiN/a-Si3N4 ceramic
http://www.platit.com/
2
http://www.shm-cz.cz/
7
composites exhibit an increase in strength with decreasing grain size. Unlike in
nanocrystalline metals, however, nanocrystalline ceramic composite coatings continue to
increase in strength while grain size decreases to as low as 3-5 nm in diameter (Argon
and Veprek [2002]).
This stark difference between the mechanical behavior of metallic and ceramic
nanocrystalline materials suggests an important question concerning the differences in
mechanisms of plastic deformation in these two materials. In metallic nanocrystalline
materials, the crossover from increasing to decreasing strength with decreasing grain
sizes is attributed to the growing importance and eventual predominance of localized
grain boundary deformation over the increasingly difficult dislocation-mediated plasticity
of the crystallite grains themselves (Schiotz et al. [1998]). Dislocation-based plasticity of
crystalline grains in ceramic nanocrystalline materials is expected to be at least as
difficult as in the case of metals (because of the higher lattice resistance of covalentlybonded materials). The lack of eventual softening with decreasing grain size in ceramic
composites, however, suggests that the mechanisms that enable grain boundary plasticity
in nanocrystalline metals either do not operate in ceramic composites or are far more
difficult to activate.
The goal of the present research is to shed light on the nature of mechanisms of
plastic deformation in grain boundaries of covalently bonded nanocrystalline materials
with the hope of explaining the ultrahardness of ceramic composite coatings. Studies of
the distribution of the TiN and Si 3N4 phases in nc-TiN/a-Si 3N4 ceramic composite
coatings have shown that the TiN aggregates into nanocrystallites of approximately 4-6
nm size while Si 3N4 forms a disordered intergranular component (Argon and Veprek
[2002]). The proportion of TiN and Si 3 N4 in the coatings is such as to allow the
intergranular material to percolate through the system, wetting the nc-TiN grains with a
layer of disordered material approximately 1-3 atomic diameters thick. Because of the
difficulty of dislocation motion in the nc-TiN grains, it is this intergranular layer that is
expected to govern the plastic deformation behavior of the nc-TiN/a-Si 3N4 ceramic
composite material as a whole.
The method we have chosen to address the problem described above is atomistic
computer simulation using empirical potentials. Such methods have been successfully
8
applied in studying the mechanical behavior of nanocrystalline metals (Schiotz and
Jacobsen [2003]; Yamakov et al. [2002]) and the structure of covalently bonded
nanocrystalline materials (Keblinski et al. [1996a]). Unfortunately, empirical potentials
for materials with complex bonding behavior are very difficult to formulate. The ncTiN/a-Si 3N4 coatings under investigation here belong to the category of materials with
high bonding and chemical complexity. No empirical potentials have been developed that
would be capable to accurately representing the interactions among its three component
elements.
In light of the difficulties involved in modeling nc-TiN/a-Si 3N4 in its full chemical
complexity, an alternative approach was pursued. Instead of attempting to replicate the
behavior or nc-TiN/a-Si3 N4 specifically, an investigation was undertaken on a simpler
(elemental) covalently bonded material for which many empirical potentials have been
developed and tested: silicon. This approach allows us to effectively separate the
influence on mechanical behavior of covalent bonding from effects that could arise from
chemical (e.g. stoichiometric) constrains. As such, it simplifies the problem at hand to a
manageable form while retaining the most important qualitative distinction between
ceramic composites and nanocrystalline metals: the covalent vs. metallic (respectively)
nature of interatomic bonding.
Finally, the intergranular material in nc-TiN/a-Si 3N4 ceramic composites has been
described as a disordered layer 1-3 atomic dimensions in thickness (Argon and Veprek
[2002]). Such intergranular layers have been observed in Si both experimentally
(Furukawa et al. [1986]) and in simulations (Keblinski et al. [1996b]). In investigating
plastic deformation in these layers, one must distinguish between mechanical behaviors
ascribable to the disordered material in its bulk form from that which results from the
high degree of confinement of the material between neighboring nondeforming
crystallites. Unfortunately, to date there has been little research done on the large-strain
plastic deformation behavior of covalently bonded disordered materials. Therefore, as a
first step to understanding plasticity in confined disordered layers of covalently bonded
material, an effort was made to elucidate the plastic deformation behavior of covalently
bonded materials in bulk form. This manuscript describes the results of an investigation
9
into the phenomenology of unit plastic deformation events in the chosen model
covalently bonded bulk amorphous material: amorphous silicon (a-Si).
10
2. Background
This section presents a literature survey of work done in areas that serve as
background and motivation for the approaches taken in the present research.
2.1 Deformation mechanisms of nanocrystalline metals
Polycrystalline metals exhibit marked dependence in shear resistance on the
length scale (e.g. diameter) of their constituent grains. For grain sizes in excess of about
10-20nm, material plastic resistance is observed to increase as approximately the inverse
square root of the grain size. The details of this dependence-known as the Hall-Petch
relationship (Hall [1951]; Petch [1953])-remain largely unexplained to this day.
Nevertheless, it is generally thought that it arises as a result of the increasing difficulty of
nucleating and propagating dislocations in grains of decreasing size (Yamakov et al.
[2002, 2001]).
At grain sizes of about 10-20nm the Hall-Petch relationship breaks down, i.e.
further decreases in grain size are not accompanied by increases in material plastic
resistance (Yip [1998]). The nature of plastic deformation in this transition regime is
thought to be extremely complicated since in it dislocation mechanisms (which remain
operative to some extent) couple strongly with grain boundary processes resulting in
phenomena as diverse as nucleation of dislocations or stacking faults from grain
boundary edges and formation of new grains (Yamakov et al. [2002]).
At grain sizes below 10-20nm, dislocation motion in the grain interiors becomes
so difficult and the volume fraction of grain boundary material so high that plastic flow
occurs almost exclusively by means of grain boundary shear mechanisms. Such processes
have been observed in computer simulations of deformation of nanocrystalline metals
with grain sizes of 3-6nm (Schiotz et al. [1998]). Emission of partial dislocations and
stacking faults is also observed during the course of deformation, but this phenomenon
was shown not to contribute strongly to the permanent accumulation of plastic strain in
11
the sample as a whole. By comparison, the highly localized atomic rearrangement events
observed between neighboring nanocrystalline grains lead to significant stress relaxation
and are therefore thought to be the most effective mechanism of plastic strain
accumulation.
The term coined to describe the overall effect of the discrete stress relaxation
events occurring in the intergranular regions of nanocrystalline metals-"grain boundary
sliding"-gives an intuitive mesoscale description of deformation in these materials.
Namely, intergranular regions are seen as layers whose inherent disorder makes them
fertile sites for undergoing large strain plastic shear flow. Connections have also been
proposed between the deformation processes in disordered grain boundaries and those
observed in glassy metals due to similarities in the structure of local atomic environments
in these two settings (Wolf et al. [1995]; Lund and Schuh [2003]). More fundamental
insight into the mechanisms that enable "grain boundary sliding" is nonetheless lacking.
2.2 Grain boundary structure in nanocrystalline network solids
The argument for the increasing difficulty of dislocation motion with decreasing
grain sizes in metals holds all the more true for covalently bonded materials such as the
nc-TiN/a-Si 3 N4 ceramic composites or nc-Si. The reason for this conclusion is that the
lattice resistance to dislocation motion is vastly higher in covalently bonded materials
than in metals. FCC metals typically have a negligible lattice resistance (about 20 MPa
(Olmsted at el. [2001])) and BCC metals have lattice resistances in the range of 600-900
MPa (Conrad [1963]) while the lattice resistance in Si is around 13 GPa (Ren et al.
[1995]), i.e. almost a full three orders of magnitude higher. In Cu, dislocation motion
ceases to play an important role in plastic flow behavior at grain sizes on the order of 1020nm. Thus, in nc-TiN/a-Si 3N4 , where the size of crystalline grains is thought to be in the
range of 4-6nm, the contribution of dislocation-mediated plasticity to the overall plastic
response of the material can be safely ignored. As a result, the structure and mechanical
behavior of intergranular material in nanocrystalline covalently bonded materials is of
prime importance to understanding the plastic flow behavior of such materials.
12
While there have been no investigations of the mechanisms of plastic deformation
by computer simulation in the case of nanocrystalline covalently bonded materials such
as nc-Si, a number of studies of grain boundary structure have been undertaken
(Keblinski et al. [1996a, 1996b]). These investigations have shown that for high angle
boundaries between neighboring grains (i.e. for orientations that are not among the few
special orientations with extremely low interface energies) there forms a disordered
intergranular layer of 1-3 atomic dimensions in thickness. Using computer simulations of
intergranular structure in silicon bicrystals, Keblinski et al. [1996b] have demonstrated
on a number of crystal orientations that structurally indistinguishable disordered layers
form both when an initially unrelaxed grain boundary is annealed as well as when two
neighboring crystal slabs are allowed to grow out from the melt until they impinge upon
each other. Furthermore, they show that the disordered intergranular structure is
thermodynamically stable in the sense that its overall energy is smaller than that of the
corresponding unrelaxed grain boundaries.
Keblinski et al. [1996a] have also carried out computer simulations to study the
structure of grain boundaries in nanocrystalline silicon. Starting with a configuration of
grains that avoided all high symmetry grain boundaries, they annealed the sample and
found that-much as in the case of the bicrystal-there formed a disordered intergranular
layer of 1-3 atomic diameters thickness. Structurally indistinguishable grain boundaries
formed when the same configuration of crystalline grains was grown from the melt,
starting with a set of properly oriented crystalline seeds. Radial and angular distribution
functions constructed at grain boundaries, triple junctions, and 4- and 6-fold points
demonstrated that intergranular material in each of these regions could be considered
disordered.
Experimental evidence in support of the existence of disordered intergranular
material between highly misoriented crystalline slabs has also been found. When
developing the technology of joining perfectly crystalline silicon wafers for
semiconductor purposes, Furukawa et al. [1986] observed that the nature of the bond
between wafers depended sensitively on the crystalline misorientation of the silicon
wafers. In particular, when the surfaces being joined had little or no misorentation, a
nearly perfect crystalline structure was formed. When two (100) surfaces were
13
misoriented by 45 degrees, a thin grain boundary whose structure was difficult to discern
resulted. If (100) and (111) surfaces misoniented by 45 degrees were joined, however, the
resulting annealed intergranular structure was a disordered layer of thickness around 10
atomic diameters.
Careful study of the structure and distribution of components in the nc-TiN/aSi 3N4 ceramic composites suggests that the TiN phase forms crystalline grains 4-6nm in
size while Si 3N4 forms a 1-3 atomic diameter-thick disordered layer that wets the nc-TiN
grains. This conclusion was reached after studies of stoichiometry (Veprek and Argon
[2002]) revealed that the proportions of TiN to Si 3N4 were just right to allow such
wetting to take place. Therefore, the expected intergranular structure of Si 3N4 in ncTiN/a-Si 3N4 coincides with the structure of intergranular layers in nc-Si as simulated by
Keblinski et al. [1996a], lending support to the choice of investigating the mechanical
behavior of the chemically complex nc-TiN/a-Si 3N4 using elemental silicon as a model
system.
2.3 Deformation mechanisms in glassy metals and polymers
As was explained in the preceding sections, plastic deformation in nanocrystalline
covalently bonded materials is expected to take place chiefly in the intergranular regions.
These regions-as indicated by simulation and experiment-can be described as layers of
disordered material confined by neighboring (nondeforming) crystallites. In order to
understand the nature of deformation in these intergranular layers, however, it is
necessary to distinguish between deformation characteristics ascribable to plastic
deformation in bulk disordered covalently bonded materials from those that can be
attributed to the severe degree of confinement to which these materials are exposed
within the context of nanocrystalline structure. To obtain this distinction, plastic
deformation in bulk disordered network materials must first be understood.
Unfortunately, to date there have been few investigations of plastic deformation in such
materials. To gain some background on deformation in other types of amorphous solids,
therefore, we review deformation processes in glassy metals and polymers.
14
Before computing capabilities became sufficiently great to allow for meaningful
atomistic simulations of plastic deformation, other methods of modeling the collective
behavior of systems composed of discrete particles interacting with spherical potentials
were developed. Among the most notable is the bubble raft technique, which allowed for
the investigation of systems composed of hundreds of constituent particles in two
dimensions. As a means to visualizing complex rearrangements occurring under
deformations applied externally, this method was an invaluable tool in the qualitative
study of atomic scale behavior of disordered materials (Argon and Kuo [1979]). Upon
complete description of the interbubble potential function the method became
quantitative as well and yielded some of the earliest insights into the mechanisms of
plastic deformation in disordered materials whose constituent atoms could be thought of
as interacting with pair potentials, namely metallic glasses (Argon and Shi [1983]).
Because of its value as a rapid visualization tool, the bubble raft technique is still used
today (Van Vliet and Suresh [2002]).
Using the bubble raft method, Argon and Shi [1983] constructed a two
dimensional representation of a metallic glass by mixing bubbles of two different sizes
and not allowing them to arrange into crystalline domains. They then deformed the
bubble raft by externally applying displacements to the walls of the raft in a way that
could be interpreted as applying total system-wide strain increments. In the course of the
deformation process, they observed that certain regions of the bubble raft suddenly
underwent large, localized bursts of displacement. These localized rearrangements
usually involved about 10 atoms. Analysis of changes in bubble positions within the
active regions before and after a rearrangement clearly indicated that these
transformations were shearing events and led to the irreversible accumulation of shear
strain, i.e. to localized plastic deformation. Using the interbubble potential developed
earlier, Argon and Shi were able to use their insight into the kinematics of atom cluster
rearrangements to calculate a distribution of activation energies associated with the
transformations.
These findings stood in stark contrast to the Eyring hypothesis of flow in liquids
(Eyring [1936]) that-until then-had been considered a likely candidate (on grounds of
structural similarity (Kauzmann [1948])) for explaining flow in glassy materials. This
15
hypothesis stipulated that individual atoms of a liquid or glass could irreversibly change
their position in a manner similar to diffusion when an opening appeared in the
surrounding medium. As indicated, however, bubble raft visualizations indicated a
mechanism involving the collective motion of around 10 atoms, not just 1 as Eyring had
proposed. Even more seriously, the motion of a single atom moving through open
channels in the surrounding medium is a mechanism that is inherently incapable of
producing shear transformations since shear cannot even be meaningfully defined unless
at least 4 interacting, neighboring atoms rearrange in a cooperative manner.
In a later series of molecular dynamics computer simulations on a two
dimensional single component system of particles interacting with a central potential,
Deng et al. [1989] verified the results found in the bubble raft studies. Defining a local
strain measure, they were able to identify transforming regions as those in which high
levels of deviatoric strain had suddenly been created. Furthermore, they addressed the
question of the correlation of excess volume distribution to the localization of shear
transformations (Turnbull and Cohen [1961, 1958]; Cohen and Turnbull [1959]). By
using a local structure descriptor based on the Voronoi tessellation around atomic
positions, Deng verified that certain regions within the model metallic glass were more
prone to undergoing irreversible transformation than others.
Building upon the work of Deng, Bulatov and Argon [1994] constructed a
simplified model of metallic glasses that presupposed a single plastic deformation
mechanism that could be activated by both thermal motion and mechanical stresses. This
assumption was meant to combine the observations that plastic deformation in glassy
metals is local and occurs preferentially at certain sites. Through a series of simulations,
Bulatov showed that this single deformation mechanism-because of elastic interactions
between transforming regions and the surrounding nondeforming matrix-is able to
reproduce all the high and low temperature behaviors observed in metallic glasses.
The work of Bulatov and Argon [1994] makes no reference to the type of
interatomic potential governing the system from which the constitutive parameters that
enter into his model (the form of thermal and mechanical activation behavior) are taken.
His general conclusions are therefore expected to apply to disordered covalently bonded
materials as much as to metallic glasses. It is nevertheless instructive to step back and
16
observe how differing empirical atomic interactions do influence the plastic deformation
behavior of disordered media by reviewing computer simulations of such behavior in
glassy polymers.
Unlike metals, polymers are governed by two types of atomic interaction: strong
covalent bonds along polymer chain backbones and weak van der Waals-type interactions
between atoms on separate polymer chains (Theodorou and Suter [1985]). This
comparatively more complex form of bonding along with a variety of possible chain
conformations and branchings leads to a large variety of possible local structure features
in polymers (Theodorou and Suter [1986]; Hutnik et al. [1991]). The kinematics of
plastic transformation in these materials is similarly more convoluted: they involve
significantly larger numbers of participating atoms than in metallic glasses (on the order
of hundreds (Mott et al. [1993])) as well as a large variety of discernable structural
rearrangements (Hutnik et al. [1991]).
Nonetheless, despite the intricacies of bonding and transformation kinematics
apparent in polymers, certain features of the fundamental mechanisms of plasticity in
these materials are entirely analogous to those occurring in the far simpler metallic
glasses. Deformation in polymers also occurs in discrete, localized bursts. It can be
activated thermally as well as mechanically and the atomic rearrangements that
accompany plastic deformation can be characterized as shear transformations (Mott et al.
[1993]). Finally, the relaxation strain spectra found in computer simulations-according
to Bulatov-are not inconsistent with operation of a finite number of activated processes.
2.4 Why dislocations do not mediate plasticity in amorphous solids
The success of dislocation mechanics in explaining crystal plasticity prompted
some investigators (Gilman [1968]) to suggest that the notion of "dislocation" can be
sufficiently generalized so that a dislocation-based structure analysis could be performed
on disordered materials. The difficulty with constructing such a generalization lies in the
inherent reference to the crystal lattice in the traditional definition of edge and screw
dislocations: both are characterized by their respective Burgers vectors (McClintock and
17
Argon [1966]). Such a characterization is impossible in materials that by definition do not
contain a crystalline component. A number of generalizations were nevertheless made
(Gilman [1968]), but only one resulted in a distinguishing criterion sufficiently
unambiguous to be applied in the context of atomistic simulation. This criterion made no
reference to the underlying core configuration of "generalized dislocations" and focused
instead on the effect that a dislocation produces in the surrounding material. Namely, it
claimed that a generalized dislocation is the kind of structure difference between two
configurations that produces a difference in stress fields between these two
configurations that can be characterized by the well-known stress fields produced in a
crystal lattice by the introduction of screw and edge dislocations (Chaudhari [1979]).
Using this definition as a starting point, Chaudhari et al. conducted computer
simulations to investigate whether it would be possible to observe generalized
dislocations in a metallic glass. They started by creating large samples of disordered
material and characterizing the stress distributions within them. They then followed a
procedure borrowed from elementary mechanics of materials textbooks for introducing
dislocations into these samples: the removal of a half-plane of atoms to create an edge
and the shear-like shifting of a half-plane of atoms to create a screw (McClintock and
Argon [1966]). Analysis of the resulting stress fields revealed that the difference in the
distribution of stresses between the new and initial sample configurations were indeed in
good agreement with those observed in crystal lattices.
Upon equilibration by potential energy minimization of the new configurations,
however, the stress field associated with the edge dislocation construction vanished: no
coherent difference between the initial and equilibrated edge configuration could be
found. In the case of the screw construction, equilibration did not destroy the
characteristic stress fields of screw dislocations in crystal lattices. Neverthelesss, the
elastic energy stored in the stress fields associated with this construction was so high
compared to the typical activation energy of localized shearing transformations of the
kind investigated by Argon and Shi [1983] as well as Deng et al. [1989] that under
normal loading conditions these shearing transformations would quickly dissipate the
generalized screw dislocation. Experimental studies of dissipation of dislocation
18
structures in crystals under irradiation confirm the relative instability of highly stressed
regions in amorphous media (Cherns et al. [1980]).
The conclusion that can therefore be drawn from the work of Chaudhari et al. is
that generalized edge dislocations are not stable within a disordered medium. Generalized
screw dislocations, on the other hand, though stable and therefore conceivably
observable, cannot be responsible for plastic flow in disordered materials because their
operation is not energetically favorable compared to other deformation mechanisms
(localized shear transformations) known to operate in these same materials (Argon
[1981]).
2.5 Structure and rigidity of covalent network materials
As was pointed out in the previous section, metallic systems can be seen as
interacting with simple spherical potentials while polymers involve strong covalent
bonding along backbones and weak bonding between individual chains. Purely
covalently bonded materials-also known as covalent network materials-involve only
strong atomic interactions of the kind found along polymer backbones. Thus, such
materials represent a state of local atomic constraint more extreme than that found in
either metals or polymers. For this reason, network materials could be expected to exhibit
some particularities in the character of unit shear transformations occurring within them
during plastic deformation much along the lines of the differences found between unit
shearing events in glassy metals and polymers.
Although no earlier work has been done on elucidating the details of unit plastic
transformations in disordered covalently bonded solids, there have been investigations
into how the bonding structure of such materials affects their rigidity. A simple local
constraint model may be used to elucidate the effect of the average number of covalent
bonds between neighboring atoms on the rigidity of a random network material (Thorpe
et al. [2000]). This approach-first proposed as a means to finding compositions for
optimal glass formability in chalcogenides (Phillips [1979, 198 1a, 198 1b])- predicts a
19
linear dependence of the concentration
f
of zero frequency eigenmodes on the average
coordination:
f = 2 -(r)
In particular, according to this treatment there are no more such modes above an average
coordination of 2.4. Therefore, above this critical value the potential energy of a wellrelaxed covalently bonded system is likely to be "stiff' in all eigendirections. These
predictions have been verified by simulations performed on random bond network
models (Thorpe et al. [2000]) and fall into a general class of problems often referred to as
"rigidity percolation" (Kantor [1984]).
Materials with average coordination higher than 2.4 can be considered covalent
network materials. The amorphous Si 3N4 intercrystalline layers in nc-TiN/a-Si 3N4
materials that motivated this research have an average coordination of 3.5>2.4, i.e. they
can be thought of as covalent network materials. Silicon-whose average coordination is
usually not below 4-results in a level of local atomic constraint that also classifies it as a
covalent network material.
The best-known model of the structure of well relaxed four-fold coordinated
random network materials was proposed by Zachariasen [1932]. This view holds that
covalent bonds between atoms are so stiff that any change in their equilibrium length
would incur a heavy energy penalty. Thus, energy would be minimized in a disordered
covalently bonded material if lack of long-range order were accommodated through
structural features other than changes in bond lengths, in particular through bond angle
distortions (Zallen [1979]). This structural model is called the continuous random
network (CRN). Its radial distribution function is clearly distinguishable from that of
disordered materials interacting through spherical potentials as the latter gives evidence
of significant variability in bond lengths as well as of ill-defined second nearest neighbor
positions (Zallen [1979]).
20
3. Methods
This section describes the computational methods used to model the structure and
deformation behavior of amorphous silicon. It also describes analysis methods used to
extract useful information from the computer simulations.
3.1 Empirical potentials
By the Born-Oppenheimer approximation (Ziman [1995]), under temperatures
and pressures characteristic of our everyday experience the ground state energy of a
group of atoms can be found by assuming that electronic degrees of freedom relax
completely while nuclear positions remain unchanged. Forces acting on individual nuclei
are then described by the variation in this ground state energy with nuclear positions. In
principle, one could accurately simulate the dynamics of an arbitrarily large collection of
atoms using this semi-quantum mechanical approach. In practice, however, such an ab
initio scheme of atomistic simulation is severely limited by the inadequate capabilities of
modern computers and can only be applied to short-time simulations of groups of about
100 atoms without resorting to use of large parallel machines. Since the research
described here requires several thousand atoms and long annealing periods, the high
accuracy of ab initio must be traded for the high efficiency of simulation based on
empirical potentials.
Atomistic simulation based on empirical potentials incurs significantly fewer
computational costs than that based on ab initio methods because instead of relaxing
electronic degrees of freedom in order to determine the ground state energy of a given
configuration of atomic nuclei, the form of the ground state energy is assumed a priori.
The forces on individual nuclei are then simply determined as the negative gradient of the
system-wide potential energy (the assumed ground state energy) with respect to the
positions of said atomic nuclei.
21
In most cases the form of the assumed potential is a sum of terms arising from
interactions of pairs, triples, quadruplets, etc. of atoms:
V(ri, r2 ,...rN)=ZV 2 (r,rj)+ZV
i<j
i<j<k
3 (rir,,rk)+...
3.1
Generic physical insights are used to choose a functional form for the potential energies
V 2 , V3 , etc. These functional forms generally include undetermined parameters that can
be chosen to make the behavior of a collection of atoms governed by the empirical
potential conform as closely as possible to the behavior of the substance being modeled.
Naturally, all functional forms entering into the empirical potential must satisfy the
requirements of objectivity and frame indifference.
A simple empirical potential often used in examples is the classic Lennard-Jones
potential (Allen and Tildesley [2000]):
12
/
6
V=4E
j<i
rij
i
where e and a are the characteristic energy and length, respectively, and rj is the
distance between atoms i and j. This potential consists entirely of pair interaction (i.e.
two-body) terms and contains two undetermined parameters. It was originally meant to
describe noble gasses, but potentials of similar form have been used to simulate metallic
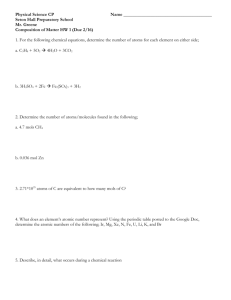
glasses as well (Deng [1989]). The functional form of the two-body term is shown in
figure 3.1 and the motivation behind it is easy to understand. If the distance between a
pair of atoms increases indefinitely we assume that the forces on both atoms will
approach zero, i.e. the slope of the potential energy will vanish. On the other hand, if two
atoms are moved sufficiently close together we know that degeneracy pressure arising
from the Pauli exclusion principle (Huang [1987]; Ziman [1995]) as applied to the core
electrons of the atom pair will cause the potential energy of the system to rise
dramatically. Finally, we realize that atom pairs can attain a stable equilibrium distance.
At this distance, the potential energy of the pair is minimized.
22
Dependence of Lennard-Jones pair potential energy on distance
6
--
5
-
4
-
-
-
-
-
--
-
-
- -
--
-
1
-
3.-.--.
-
.
.-.-
CL
4a)
...
... ......
.....
2.
.
......... ... ........ ......
.....
1.
.... ......
....... ....... .........
C
0 .... .
....
....
.....
- ...... 1.
1
1.4
1.6
Reduced distance (cr/r.)
...
..
. ....
... .... ..
..
1.2
........ ....
.....
....
....
1.8
2
Figure 3.1: The essential physical features of the Lennard-Jones pair potential are the strong repulsion at
close distances, vanishing interaction at large distances, and the intermediate equilibrium (minimum
energy) state.
The lowest energy crystal configuration attainable in most spherically symmetric
empirical potentials such as Lennard-Jones is the densely packed face centered cubic
structure. The lowest energy STP configuration of silicon, however, is diamond cubic.
Therefore, to create a basic empirical potential for silicon one must incorporate at least
one physical insight in addition to those described above, namely that potential
interactions favoring the arrangement of bonds between neighboring atoms at the
tetrahedral angle of 6 = cos'(- -) ~109.50 be added. The distinguishing features of
empirical potentials created to model silicon center around the way in which this physical
insight was incorporated into the functional form of the potential and in the number of
additional modifications made so that the behavior of an atomic system modeled by the
23
potential in question accorded with subtler experimentally determined characteristics of
silicon.
En excellent review of available empirical potentials for silicon was given by
Balamane et al. [1992]. Here, however, we shall only describe the most commonly used
ones, namely those due to Stillinger and Weber [1985], to Tersoff [1986], and the EDIP
(Bazant et al. [1997]). Of these three, the Stillinger-Weber potential was chosen for the
present work due to its simplicity and good semi-quantitative agreement with the
behavior of real silicon. For this reason, it shall be described in greater detail than the
other two empirical potentials.
The Stillinger-Weber potential consists of a summation of two- and three-body
potential interaction terms:
V (r r2,...rN
j)+ j:V3(rijrj
=:2(r
i<j
,rik )
i<j<k
where rij indicates the distance between atoms i and j. The potential contains
characteristic length and energy parameters a and e. These parameters are used to
nondimensionalize the component terms V2 and V3 as follows:
V2 (rj)= 'f 2 (rij /a)
V3 (rj rkri ) = Ef 3 (r, /a r /a ri/ /
The functional form of the two-body terms f2 was chosen to be
)e
f 2 (r) = A(Br-
,r < a
0, r > a
This functional form embodies the same physical intuitions as does the Lennard-Jones
potential. The exponential term applies a "potential cutoff radius," i.e. it is a construction
that ensures that the value of the two-body interaction and all of its derivatives goes to
24
zero at the distance specified by parameter a. A, B, p, q also denote parameters and can
be chosen to fit the form of the potential to experimental results for silicon.
The three-body potential terms have the form
3 (rij
rjk 1 ik)= h(r , rik ,IOjk)+ h(rj , rk,6,,k )+ h(rik, ri , OkJ
{(cos iik + 1) e(ri~"aIk-
(r rk,
, (r1
< a)A (k
<a)
ii ik
Ojik =
r. + r
r
- ri
r
2 rirk
The essential feature of this functional form is the (cos 0
angle
Ojik
+
1)2
term. When the bond
is precisely the tetrahedral angle found in the diamond cubic lattice
configuration, the value of this term vanishes. Otherwise, it has some positive value.
Therefore, the three-body interactions so constructed fulfill the requirement of favoring
the four-fold coordinated configuration exhibited by silicon in its diamond cubic form.
Note that the exponential term fulfills the same purpose here as in the case of two-body
interactions, namely it enforces a potential cutoff radius. A and y are parameters of the
potential.
The parameters appearing in the functional forms described above were chosen to
ensure the best agreement with the experimentally observed behavior of silicon. The
criteria guiding the selection were:
" Stability of the diamond cubic lattice structure at STP
" Temperature of the melting point
" Silicon contracts upon melting and forms a highly coordinated liquid form
" Lattice spacing and atomization energy of crystalline silicon
These criteria led to the following choice of parameters:
25
A = 7.049556277
B = 0.6022245584
p= 4
q =0
a =1.80
A =21.0
y =1.20
=
0.20951nm
e =50kcal/ mol = 3.4728 -10-19 J
The behavior of the resulting empirical potential is in good semi-quantitative agreement
with experiments (Luedtke and Landman [1989]), particularly for the liquid state. Its
greatest drawback is its tendency to overpredict the coordination of well-relaxed
amorphous silicon by about 4%. Nevertheless, its simplicity and intuitive functional form
made it the most attractive model for the purposes of this study.
Unlike the Stillinger-Weber potential, the Tersoff potential includes only twobody terms:
V
=
Z fr
-)Ae
- BeA
i,j#i
This choice of functional form is motivated by the realization that binding-energy curves
for solid cohesion and chemisorption can be described by a single dimensionless curve
and three scaling parameters (Rose et al. [1983]) and that this behavior can be achieved
by the assumption of an interatomic potential of the above form (Abell [1985]). The first
exponential term in brackets describes repulsion while the second describes bonding. In
order to ensure that silicon have the required tendency to form the four-fold coordinated
diamond cubic structures, the value of Bij could not be taken as constant. Instead, it was
given a complex functional form that reflected the weakening of bond strengths in a
highly coordinated atomic environment.
f,
is a potential cutoff radius function.
The parameters in the final functional forms specified by Tersoff were fitted to
give maximum agreement for the lattice constant, bulk modulus of bulk Si, and for the
26
cohesive energies of the Si 2 dimer, the diamond cubic structure, and of hypothetical Si
simple cubic and FCC structures. The behavior of the potential so parametrized was
tested by comparing it to results from a number of ab inito simulations, mainly of lattice
defect structures (Tersoff [1986]). This potential was not chosen for the present study
because its relatively complex functional form does not lend itself to easy algebraic
manipulation nor to immediate intuitive understanding.
The EDIP (Environmentally Dependent Interatomic Potential) combines the
approaches used in the Stillinger-Weber and Tersoff potentials: it includes two- and
three-body interactions, both of which depend on the form of the environment of
individual atoms. The highly involved parametrization of this potential (Bazant et al.
[1997]) results in good transferability to certain types of silicon lattice defect structures
(Justo et al. [1998]). EDIP is also capable of modeling well-equilibrated amorphous
silicon structure better than Stillinger-Weber can. Nevertheless, it does not do well in
reproducing certain properties of silicon in its liquid form (Keblinski et al. [2002]). In
particular it severely underpredicts the coordination and volume contraction of the melt.
Its ability to accurately model quickly quenched (suboptimally relaxed) disordered
structures is therefore in question. These drawbacks together with the high complexity of
EDIP made its use unattractive for the purposes of this study.
3.2 Molecular dynamics (MD) simulation
The collective behaviors of systems composed of many atoms and governed by
complex interaction potentials are most commonly investigated by Monte Carlo (MC)
and molecular dynamics (MD) simulations (Allen and Tildesley [2000]). The former are
especially convenient in studies of long-time thermodynamic behavior, particularly if the
salient unit processes are already well understood. The latter are more useful when
detailed investigations of atomic level motion are called for. Therefore, in cases when
little is known about the physical processes governing long time collective behavior-as
in the formation of amorphous silicon from the melt and the deformation behavior of the
resulting material-molecular dynamics is preferred despite the greater computational
27
resources it requires. The fundamentals of this simulation technique are described in this
section.
Given an interaction potential, a molecular dynamics can be carried out by
specifying an initial atomic configuration (including boundary conditions) and integrating
the Newtonian equations of motion
i = Pilmi
3.2
p = -VV = fA
Here r, p, m, and f denote position, momentum, mass, and force (respectively), V is the
assumed interatomic potential, and i indicates one of the 3N degrees of freedom of the
system (each associated with a component of a single atom's position). Equations 3.2 are
integrated using a finite difference scheme such as the commonly used Gear predictorcorrector (Allen and Tildesley [2000]). In this method, time derivatives of atomic
positions up to the fifth order are stored in memory. They are used to predict the future
positions and their time derivatives after a suitably chosen time increment At. These
predicted quantities are then corrected to account for information obtained from
computing atomic accelerations using the interatomic potential. The computation of
potential-related quantities like atomic accelerations is by far the most time-consuming
step in an MD simulation. Thus, since they only require a single acceleration computation
per time step, numerical integration techniques such as the Gear predictor-corrector are
preferable to Runge-Kutta-type schemes in MD simulations.
Given a judicious choice of simulation parameters (such as the integration time
step At) a simulation of the type described above results in an energy-conserving system
trajectory, as predicted by equations 3.2. Additionally, a variety of specialized techniques
exist to conduct simulations at constant temperature, pressure, enthalpy, Gibbs free
energy, etc. (Allen and Tildesley [2000]). Many of these techniques require a
modification of the equations of motion according to Gauss' principle of least constraint
(Evans and Morriss [1984]). A well known example is the Hoover [1983] constant
temperature algorithm which requires that instead of solving the classical Newtonian
equations of motion 3.2 the MD algorithm be used to integrate
28
r, = pilmi
A =fi -
(Jrjpj :j=1...3NI)pi
3N
( rj, pj :
j
= 1... 3NI) = '
j=1
This altered set of equations of motion can be shown to generate trajectories that sample
the canonical ensemble (Evans and Morriss [1983]) just as the trajectories of 3.2 sample
the microcanonical.
As was mentioned before, the most time-consuming step of an MID simulation is
the evaluation of an interatomic potential-related quantity such as the system potential
energy or atomic accelerations. The root cause of this limitation is the need to loop over
all pairs of atoms in the case of a two-body potential or all triplets of atoms in the case of
a three-body one. The number of computations required therefore scales as the second
and third power of the total number of atoms (respectively) and can easily exceed one
billion computations per evaluation for systems containing thousands of particles. The
evaluation process can, however, be made significantly faster if the form of the
interatomic potential incorporates a cutoff radius, as does the Stillinger-Weber potential.
In that case each atom only interacts with other atoms within a certain a distance of it. It
can therefore be arranged through the use of linked-cell and Verlet neighbor lists (Allen
and Tildesley [2000]) that the number of computations required scale linearly with the
number of atoms, making large-scale MD simulation feasible.
3.3 Conjugate gradient static energy minimization (CGSEM) simulation
While MD is a useful method for investigating the behavior of collections of
atoms obeying full Newtonian or Gauss-constrained dynamics, there are circumstances
when motions of individual atoms do not have much effect on the physical phenomenon
of interest and may even obscure it. Such a situation arises in the investigation of plastic
29
deformation mechanisms at low temperature, i.e. when diffusion does not play a major
role (Argon [1996]). It is then convenient to remove atomic motion entirely and to
simulate the deformation behavior of an atomic system by applying increments of the
loading parameter and ensuring that the potential energy of the system is at a local
minimum for each value of the externally applied load. The resulting system behavior can
then be viewed as corresponding to the temperature-dependent mechanical behavior
extrapolated to zero temperature, where all phenomena uniquely associated with the
approach to (the physically unattainable) absolute zero have been ignored.
A simulation of the type described is often referred to as static energy
minimization (SEM) simulation (Mott et al. [1993]) or a potential landscape method
(Stillinger and Weber [1983]). Since it is generally used on systems that are
thermodynamically metastable (e.g. as amorphous silicon is with respect to crystalline
silicon), it does not require the attainment of global potential energy minima. An initially
disequilibrated structure must simply be brought to an equilibrium configuration by
minimization of potential energy to a local minimum. The core algorithm that lies at the
heart of a typical SEM simulation is therefore one of the classical local minimization
schemes, such as the Newton-Raphson, quasi-Newton, conjugate gradient, or steepest
descent method (Bertsekas [1999]).
Newton-Raphson and quasi-Newton techniques guarantee the fastest convergence
to equilibrium in the vicinity of a local minimum. Nevertheless, they require the largest
computational resources and suffer from a number of inadequacies if minimization is
attempted for a configuration initially far from stable equilibrium. Steepest descent is the
simplest and most robust of the four schemes mentioned above, but it offers the slowest
rate of convergence. The conjugate gradient (CG) method was therefore chosen for the
current investigation. It offers superlinear convergence in the vicinity of a minimum,
requires comparatively small computational resources per simulation step, and operates
reliably for all initial configurations (Bertsekas [1999]).
The CG method-as all techniques for minimization of nonlinear functions-is an
iterative method. Given a starting configuration, it produces a new one with a lower value
of the function to be minimized. This cycle is then repeated using the configuration just
obtained as the new starting configuration. Assume that at the beginning of the kth cycle
30
the system is in some configuration
xk
where x is a 3N-dimensional vector containing all
the atomic positions. We then vary the system configuration by displacing atoms linearly
along a given direction d (d is a 3N-D vector) by some amount ak (a is a scalar). The
displaced configuration is
3.3
xk+1 = xk + akdk
Given some direction dk, a can be chosen by conducting a one-variable unconstrained
minimization of the potential energy V(xk+1
)= V(xk
+ akd k
)= V(a) along dk using a
line-minimization scheme such as the Brent method (Brent [1973]) or cubic interpolation
(Bertsekas [1999]). Once a minimizing a is found, this procedure is repeated starting
from
x k+
and along a new direction dk+ until some previously specified convergence
criterion is met.
The heart of the conjugate gradient method lies in the selection of the lineminimization direction d. The most common choice-and the one used in the current
research-is due to Polak and Ribiere [1969] and can be stated briefly as
kg k
R
=
k-1
g k-1i .*gk-i
.
gk =V xV(xk)
g -as the last line indicates-is the gradient of the potential function at configuration
with respect to the atomic positions x.
If in the above formula we had
#
=0, the algorithm would reduce to the steepest
descent method, i.e. for any initial configuration the line minimization 3.3 would be
carried out in the direction where V(x) decreases the fastest. Though such an approach
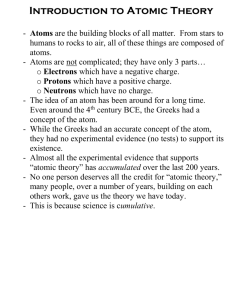
appears reasonable at first glance, it can be shown to offer slow (often nearly linear)
convergence if the minimum lies in a narrow "potential valley" (fig. 3.2). The value of
selecting
#
xk
as indicated in 3.4 is that every new minimization direction dk is linearly
31
independent of the (k-1) previous directions. The frequent retracing along previous
minimization directions apparent in the "zigzag" approach to the minimum characteristic
of the steepest descent method (fig. 3.2) is therefore avoided. As a result, the conjugate
gradient method yields superlinear convergence rates, sometimes even approaching the
quadratic convergence of the more complex and computation-intensive quasi-Newton
methods (Bertsekas [1999]).
a)
b)
Figure 3.2: Minimization in a narrow valley. a) The steepest descent method retraces its steps in a
characteristic "zigzag" pattern. b) Successive conjugate gradient directions are chosen to be linearly
independent from the previous ones, leading to faster convergence.
3.4 Analysis
MD and CGSEM are capable simulating the dynamic and static structure
evolution of collections of atoms, but say nothing of the task of interpreting and
analyzing the output structures. Appropriate techniques must therefore be chosen and
brought to bear on the results of any atomistic simulation in order to extract some
physical insight from it. This section describes methods that allow the outputs of a MD or
CGSEM simulation to be understood in terms of concepts commonly used in continuum
mechanics, namely "stress" and "strain."
3.4.1 Atomic stress
The stress components of a system described by a potential function V(r,
can be expressed as (Allen and Tildesley [2000])
32
r2
,...rN
BTP
O
3.4
+~Iav
V au af
The first term on the right hand side arises from thermal motion and depends linearly on
temperature and density (kB is the Boltzmann constant). The second term is the variation
of the potential energy with the appropriate component of the deformation gradient u. V
is the total system volume.
The derivation of expression 3.4 interprets "stress component" as the appropriate
resolved force component per unit area acting across any chosen surface and follows the
approach typically used in the kinetic theory of gasses (Haile [1997]). For the purposes of
atomic-level structure analysis, however, it is convenient to ignore the thermal
component and to reinterpret the potential-derived part in expression 3.4 in terms of
atomic contributions to the total system stress. This goal can be achieved
straightforwardly if the empirical potential V has the form of a sum of terms such as 3.1.
For two-body interactions, for example, we make use of the fact that the forces exerted
on each atom participating in the interaction are equal and opposite to write down
~af
Lja>,
~
= 1
V
fiiV j ,, 2V~i
)
atomic
fuja jfl
i 2V-i
where 14 is the atomic volume of atom i. It can set as the average volume per atom in a
given system or determined according to the more sophisticated Voronoi tessellation (see
section 3.4.2). The subscripts a and
#9 on
4
and r, denote Cartesian components of
those vectors. In general, we can write
atomic
ia _farfl
33
where the summation is taken over all forces acting on atom i. This form of the atomic
stress is easily applied to three-body terms as well as higher order ones (Brown and
Neyertz [1995]).
3.4.2 Atomic strain
In addition to characterizing stresses on the atomic level, it is convenient to be
able to define a measure of atomic-level strain. Such a definition was proposed by Mott
who made use of the dual Voronoi and Delaunay tessellations of space in his
development (Mott et al. [1992]). The strain measure described here is essentially Mott's,
although with a few modifications.
Given any set of points in a space-call them "atoms"-the Voronoi tessellation
subdivides the space into polyhedral regions constructed around individual atoms. These
regions have the property that any location within a given region is closer to the atom
around which the region is constructed than to any other atom (De Berg et al. [2000]).
Locations on boundaries between two such regions are equidistant from two atoms.
Locations where three such regions meet are equidistant from three atoms. For a general
distribution of atoms in space (i.e. for one that lacks any symmetry properties, e.g. a
random distribution) there are no points that are equidistant from five or more atoms.
Nevertheless, such circumstances can arise in ordered distributions of atoms such as
crystal lattices.
Given a Voronoi tessellation of any configuration, it is possible to construct yet
another subdivision of space: the Delaunay tessellation. This scheme uses the same
principle that was applied to find the Voronoi tesslellation, but with the vertices of the
Voronoi tessellation as starting points, i.e. it subdivides space into regions centered on
vertices of the Voronoi tessellation such that any location within a region is closer to the
vertex around which it is constructed than to any other vertex. This tessellation can be
shown to result in a subdivision of space into tetrahedra whose vertices are the atoms of
the given configuration for which the original Voronoi tessellation was constructed. A
moment's reflection will reveal that since the vertices of the Delaunay tessellation are the
original atoms of the configuration, one more application of the principle used to generate
34
the tessellations described above will once again yield the Voronoi tessellations. The
Voronoi and Delaunay tessellations are therefore dual (De Berg et al. [2000]).
Voronoi and Delaunay tessellations each offer distinct advantages for the
purposes of defining an atomic-level strain measure. The polyhedra of the Voronoi
tessellation are purely geometrical objects each of which is unambiguously associated
with one atom. Furthermore, their shape is uniquely determined for any distribution of
atoms. The deformations of Voronoi polyhedra resulting from displacements of atoms in
the system are therefore a natural candidate for defining an atomic level strain measure.
Their drawback, however, is that these deformations can be highly nonuniform (owing to
the potentially nonuniform displacements of the underlying atoms) and the resulting
strain measure would have to exhibit a sufficient complexity to reflect these effects. The
Delaunay tessellation, on the other hand, yields tetrahedra whose deformations are easily
described by uniform strains. It is centered not on atoms, however, but on interstitial
regions, i.e. the vertices of the Voronoi tessellation. An ambiguity therefore arises as to
the atom to which the strains observed in a Delaunay tetrahedron should be assigned.
Mott's solution to the problem described above was to find the strains for the
components of the Delaunay tessellation, but to apportion them to individual atoms
making use of the Voronoi tessellation. This assignment was achieved by finding the
volume of the intersection between each Voronoi polyhedron and Delaunay tetrahedron.
The (nonuniform) strain of each Voronoi polyhedron was then determined as a sum of
contributions from all Delaunay tetrahedra that intersected it, each term in the sum being
weighted by the previously determined intersection volume:
6
atomic
af
_
-rv
int er sec tion
V
atomic
J
Dlta
Delaunay
The initial construction of the Voronoi and Delaunay tessellations was achieved
by the method of Tanemura et al. [1983] and the apportioning of strains was conducted
essentially as described by Mott [1992]. Nonetheless, two important improvements were
made. First, as pointed out earlier, for general distributions of atoms it is very unlikely
that there should exist points equidistant from four (five, for 3-D) or more atoms. If such
35
a "degenerate" situation should arise, it would correspond to five or more Voronoi
polyhedra meeting at a single vertex. The amorphous structures under study here are
sufficiently disordered for degenerate situations to arise very rarely, but regions of local
partial crystallinity are nonetheless possible. In such cases, the original algorithm fails.
The modification introduced for the purposes of the current research circumvents this
problem by recognizing the degenerate situations described above and arbitrarily
choosing from among the number of equivalent configurations that are made possible by
it (Tanemura et al. [1983]).
The second improvement concerns the method of finding intersections between
Delaunay tetrahedra and Voronoi polyhedra. Whereas Mott used a recursive method that
defined the total intersection volume iteratively as a sum of successive terms, the method
used here determines the intersections directly by finding the region bounded by all
surfaces of both the Voronoi polyhedron and Delaunay tetrahedron of interest. It
therefore avoids all possible problems of convergence. It was found that Mott's
implementation frequently failed to give consistent outputs even when the initial
tessellation was successful. The improved scheme failed only once out of the almost one
thousand times that it was applied.
3.4.3 Hydrostatic and deviatoric tensor components
The methods for finding atomic level stresses and strains described above yield a
full tensorial description of these quantities. For the purposes of analysis, however, it is
usually convenient to find scalar quantities that by themselves characterize certain
aspects of the full tensor. Two such scalars are of particular interest: the hydrostatic and
equivalent deviatoric components. Given any tensor A they are
Ahyd
A e =
tr(A)
(
-- Ahyd )T
(A
Ahyd
These scalars have particular significance in the context of mechanical deformation of
materials. The negative hydrostatic component of the stress tensor is the system pressure.
36
Similarly in the case of strain, the hydrostatic component corresponds to dilatation.
Meanwhile, the
times the deviatoric component of stress is the von Mises stress often
used in yielding criteria (McClintock and Argon [1966]).
37
4. Results
This section describes the results of MD and CGSEM simulations carried out in
the course of the investigation. All results pertain to systems containing 4096 atoms. In
order to eliminate any possible surface effects, all simulations were conducted under
periodic boundary conditions.
4.1 Creating a-Si
The available methods that attempt to create computer models of a-Si with a
continuous random network structure can be broadly classified into two categories: direct
construction by bond switching (Wooten et al. [1985]) and melting and quenching
(Luedtke and Landman [1989]). The former starts with a diamond cubic crystalline
sample and progressively disorders it by rearranging individual bonds according the prespecified rules. Although effective for small system sizes, this method becomes
cumbersome when thousands of atoms are involved. Furthermore, the bond-switching
process is inherently unphysical as no instance of such "self-amorphization" at low
temperatures has been observed in silicon.
a-Si creation by melting an quenching, on the other hand, has been known at
times to produce final structures whose character was further from the anticipated
continuous random network than when bond switching was used (Luedtke and Landman
[1989]). Nevertheless, the way in which melting and quenching arrives at the amorphous
configuration is more true to the way a-Si could be made in an experimental setting.
Therefore, the approach used in the present research was the melting and quenching
approach.
38
4.1.1 Initial condition: c-Si
Melting and quenching was accomplished by using a constant temperature
molecular dynamics (MD) algorithm. The initial conditions provided for the simulation
were the positions of atoms in a perfect diamond cubic silicon crystal. This initial system
configuration was constructed in such a way that all atoms were stationary and in
equilibrium (corresponding to zero temperature). The size and shape of the simulation
cell was chosen in such a way as to minimize the overall system potential energy
(corresponding to zero stress).
Figure 4.1: The configuration of atoms in the diamond cubic crystal structure. In the Stillinger-Weber
potential for silicon, the equilibrium distance between nearest neighbor atoms (i.e. the bond length) in this
configuration is 0.235nm.
39
The diamond cubic structure can be described in terms of cubic unit cells-each
containing eight atoms-repeating in the x, y, and z directions. Although this cubic cell is
not the primitive cell (the primitive unit cell is similar to the one for the FCC
configuration, but contains two atoms (Ziman [1995])), it is convenient for the purposes
of both constructing and visualizing a crystalline silicon (c-Si) configuration. Figure 4.1
illustrates the arrangement of atoms in the diamond cubic crystal structure. It is easy to
see that in this configuration each atom has four nearest neighbors, i.e. diamond cubic cSi is four-fold coordinated.
4.1.2 Melting
The initial crystalline structure described above was melted by conducting MD
simulations at increasing temperatures. Starting at T=25K, the temperature was increased
by increments of 25K up to T=4000K. At each temperature, the structure was
equilibrated for 2000 MD time increments (a total of 10.7 ps), corresponding to 140
atomic vibration periods in the Stillinger-Weber potential. The rate of temperature
increase was therefore 2.33 .1012 K/s, i.e. much higher than can normally be achieved
experimentally (with the possible exception of pulsed laser melting (Thompson et al.
[1984])). Conducting the melting process at lower rates of temperature increase did not,
however, yield any changes in the observed melting profile. This insensitivity to heating
rate can be explained by lack of temperature-activated relaxation processes in the
crystalline state and the very fast thermodynamic equilibration of atomic positions in the
liquid state.
The dependence of system specific volume (volume normalized by the volume of
c-Si at zero temperature and stress) during melting is shown in figure 4.2. The most
prominent feature of this profile is the sudden drop of volume at a temperature of about
2500K. This volume drop coincides with the melting of the crystalline configuration and
is characteristic not only of silicon, but also generally of many substances that exhibit a
diamond cubic crystalline structure (Angell et al. [1996]), the best known of these being
water. Indeed, obtaining a drop in volume upon melting was one of the central
40
motivations behind the choice of parameters for the Stillinger-Weber potential (Stillinger
and Weber [1985], see section 3.1).
Variation of specific volume of SW Si during melting and quenching
1.03
1.02 1.011
Crystal
1
0.99 -
0.98
Liquid
h
Y 0.97-
0.96
Amorphous
0.95
0.94
0.9 3 L
0
500
1000
2500
1500 Tm 2000
Temperature [K]
3000
3500
4000
Figure 4.2: c-Si contracts upon melting and-given a high quench rate-does not recover all of the lost
volume upon vitrification.
Although melting of c-Si in a MD simulation such as the one described here
occurs at about T=2500K, this is not the phase transition temperature between the
crystalline and molten state, i.e. it is not the thermodynamic melting temperature Tm.
Broughton and Li showed that Tm for the Stillinger-Weber potential is 1691 ± 20K
(Broughton and Li [1987]). Because, however, the initial crystalline arrangement in the
simulation described here was flaw-free, the system could undergo a high degree of
overheating due to the large barrier to nucleating an initial molten region. Defects such as
grain boundaries can serve as preferred sites for easy nucleation of the melt. Indeed, if
such defects are introduced into the initial configuration, the temperature at which the
41
system undergoes melting is drastically decreased and approaches Tm (Phillpot et al.
[1989]).
RDF of molten SW Si
2
1.8
1.6
1.4
-2-1.2
-0.8
0.6
0.4
0.2
a)
0
0.5
1
1.5
2
2.5
Reduced distance
3
3.5
4
Nearest neighbor ADF of molten SW Si
A..7.
0.6-
0.5-
0.4-
0.30
0.2-
0.11
b)
I
0
20
40
60
80
Angle
100
Idegrees]
120
140
160
180
Figure 4.3: a) RDF of molten silicon. Distances have been normalized by the Stillinger-Weber
characteristic distance (section 3.1). B) ADF of molten silicon.
Evaluation of radial and angular distribution functions (RDFs and ADFs) for
molten silicon clearly shows the disappearance of long range order as well as a loss of
definition in the bond angles between nearest neighbors (fig. 4.3). By integrating the RDF
42
up to the first "trough" after the nearest neighbor peak we can conclude that the average
coordination of molten Si as modeled by the Stillinger-Weber potential is around 6,
which is in good agreement with the experiment (Davidovic et al. [1983]).
4.1.3 Quenching
Upon reaching T=4000K, the temperature of the system was decreased in 25K
increments and the system configuration was equilibrated by MD simulation at each new
temperature in the same way as was described above. The resulting variation of specific
volume during quenching is depicted in figure 4.2. The system persists in the molten state
for temperatures far below the melting temperature and eventually vitrifies at Tg: the
glass transition temperature. Subsequent heating of the vitrified material leads to
remelting at the glass transition temperature.
The phenomenon of undercooling is analogous to the overheating described above
in that a transition to the thermodynamically stable state (the crystalline state, in this
case) is impeded by a nucleation barrier. Much as this nucleation barrier can be reduced
in the case of melting by the insertion of defects into the crystal structure, it can be
eliminated in the case of crystallization if a small crystalline nucleus is added at a
temperature slightly below Tm. The molten material surrounding it then crystallizes on
time scales accessible to MD simulation (Keblinski et al. [1996a, 1996b]). The time scale
for the spontaneous creation of such a nucleus, however, is prohibitive given current
computational capabilities unless specially modified empirical potentials are used
(Nakhmanson and Mousseau [2002]).
Increasing degrees of overheating lead to the crystalline structure to become
increasingly unstable under thermal motion resulting in an eventual spontaneous
transition to the molten state (Phillpot et al. [1989]). Increasing degrees of undercooling,
however, are accompanied by ever decreasing atomic mobilities making it more difficult
for crystalline nuclei to form and grow. Eventually, atomic mobilities become so low that
the underlying liquid configuration becomes "kinetically frozen" and no longer
undergoes significant structural relaxation. The temperature at which this phenomenon
occurs is called the glass transition temperature Tg and is easily identified by the rapid
43
change in thermal expansion coefficient of the material. Note from figure 4.2 that the
thermal expansion behavior of the material is nearly identical before melting and after
glass transition: thermal expansion coefficients for the crystal and glass are
ac-si =1.26 -10-'K-' and a,-si =1.14 -10-'K~', respectively. The thermal expansion
coefficient of the liquid, however, is nearly four times higher: a-si = 4.18 -10~' K-1 .
Unlike the melting phase transition from crystal to liquid structures (Huang
[1987]), the exact physical nature of the glass transition is not yet well understood.
4.1.4 Structure characterization
Much like in the case of metallic glasses, the character of amorphous silicon as
formed by melting and quenching depends sensitively on the rate of quenching: slow
quenching allows for greater structural relaxation resulting in a disordered configuration
whose macroscopic features (e.g. specific volume) more closely resemble that of the
crystal. Fast quenching, on the other hand, locks in a less-relaxed configuration whose
characteristics are less like those of the crystal. Figure 4.4 shows the effect of increasing
the quench rate from 2.33 .1012 K/s to 3.73 .1013 K/s on specific volume variation in
Stillinger-Weber a-Si. Unlike in the case of metallic glasses, slower quenching leads to a
rise in the specific volume of the product. Nevertheless, since silicon in its molten form is
denser than the crystal, this rise in specific volume is consistent with slowly quenched
glasses being more structurally relaxed and therefore more similar to the crystal structure
than those that were quenched quickly.
Because structural features of a-Si are not readily appreciable by inspection,
atomic-level differences between quickly and slowly quenched a-Si were investigated by
numerical means. Figure 4.5 compares the RDFs and ADFs of the quickly and slowly
quenched a-Si structures with those of c-Si. Note that in both cases long-range order is
lost and bond angles are widely dispersed (although less so than in the case of molten
silicon, see figure 4.3). The split second peak apparent in the RDFs of both structures
indicates that second nearest neighbors are ill defined in the system (Zallen [1979]). This
characteristic of the RDF is a feature commonly observed in equilibrated ball bearing
44
packings and metallic glasses. Its presence in the RDFs of a-Si is a sign that some
residual structural characteristics of the (metallic) liquid form of silicon remain in the
system even after the glass transition.
Faster quench rates lead to smaller volume recovery
1.04
1.02
-
1
al)
E
0
0.98 -
a-
0.96k
0.94
-
0.92'
0
500
1000
quench rate = 2.33x1 012 K/s
quench rate = 3.73x1 013 K/s
1500
2000
2500
Temperature [K]
3000
3500
4000
Figure 4.4: The faster molten silicon is quenched, the denser the final amorphous structure.
In the continuous random network setting, no split second peak is expected
(Zallen [1979]). It is not surprising, therefore, that the structure of the more slowly
quenched system is in better agreement with experiment (Laaziri et al. [1999]).
Integration of the RDFs up to the first trough after the nearest neighbor peak shows that
the average system coordination of the quickly quenched structure is 4.6 while that of the
slowly quenched structure is 4.4. In this respect the slowly quenched structure is once
again in better accord with experiment.
45
Comparison of RDFs between structures quenched at different rates
5
-
4
quench rate = 2.33x101 K/s
1
quench rate = 3.73x10 K/s0
3.53i 2. 52-
0.5
a)
0,
0
0.5
1
1.5
2
2.5
Reduced distance
3
3.5
4
Comparison of nearest neighbor ADFs between structures quenched at different rates
1.:
1.1 6
quench rate = 2.33xI 012 K/s
quench rate = 3.73x1 013 K/s
1. 422:C
a)
*0
C
0
-o 0. 8 -S
cn
0
60. 40.
2-
0
b)
20
40
60
80
100
Angle [degrees]
120
140
160
180
Figure 4.5: a) The split in the second neighbor peak is less pronounced in the more slowly quenched
structure. b) The bond angles in the more slowly quenched structure are less dispersed than in the more
quickly quenched one.
46
4.2 Irreversible deformation: system view
After a-Si structures were created using the melting and quenching process
described above, the best relaxed of them was deformed plastically by using conjugate
gradient static energy minimization (CGSEM) simulations. This section describes the
system-wide response of the material to such deformation.
4.2.1 Loading procedure
a-Si structures containing 4096 atoms and generated by the quenching process
described in section 4.1 were brought to the closest equilibrium configuration
(corresponding to zero temperature) by minimizing the system potential energy using the
CGSEM method (section 3.3). Next, in order to deform such equilibrated structures,
strain increments were successively imposed on the system by changing the shape of the
simulation cell. These strain increments were chosen such that they did not change the
system volume and did not allow for any deformation in the z-direction. Therefore, they
can be described as increments of volume conserving plane strain (figure 4.6).
dyO=-0.000
dez=0.000
99
dx=0.00 1
Figure 4.6: The system was loaded with volume conserving plane strain increments.
47
After an increment of strain is imposed on the system, the resulting atomic
arrangement is in general no longer in equilibrium. Therefore, after each strain increment
the CGSEM algorithm was used to once again bring the system into the closest
equilibrium configuration. The process of successively deforming and reequilibrating an
a-Si system can be carried out repeatedly to generate a large-strain deformation profile.
4.2.2 Discrete stress relaxation events
If small increments of strain are applied to a system consisting of a few thousand
atoms, then a smooth variation of system pressure and deviatoric stress is observed. Now
consider that the deformed system is unloaded, i.e. that the CGSEM-based deformation
process described above is repeated except using strain increments that are inverse to the
ones used when initially deforming the system. Such deformation eventually returns the
simulation cell to its initial shape. For such unloading the system pressure and deviatoric
stress are seen to retrace the values they took in the case of initial loading (figure 4.7).
Therefore, when the system stress-strain response is smooth, the deformation is reversible
by simple unloading and can therefore be considered elastic.
If, on the other hand, a discontinuous change in the system stress is observed
during loading, the unloading behavior of the system becomes entirely different as figure
4.7 illustrates. The stress-strain behavior is clearly irreversible. Meanwhile, differences in
atomic positions between the system configuration for loading and for complete
unloading following the stress-strain discontinuity show that the system has suffered an
internal structural change that cannot be reversed by simple unloading (figure 4.8).
The stress relaxations described here have been observed before in deformation
simulations of a variety of disordered materials (e.g. Argon and Shi [1983]; Mott et al.
[1993]). They have been identified as indicators of discrete atomic-level mechanisms
responsible for system plastic deformation. The apparently smooth macroscopic stressstrain behavior of materials undergoing plastic deformation is thought to be a result of the
ensemble-averaging of large numbers of unit events like the one shown in figure 4.7.
48
Loading is reversible (elastic) until a discrete stress relaxation occurs
1.08
a)
discrete
stress
relaxation
1.06 -
1.04
M40
(n
04
-
loading
loading
a)
0
unloading
2
loading
unloading
-
0.98
0
1.5
x 10-3
1
0.5
Deviatoric strain
Loading is reversible (elastic) until a discrete stress relaxation occurs
-2.78
b)
---
n
nodloading
unloading
-2.8discrete
stress
>)
relaxation
a)
-2.82
loading
-
loading
--- unloading
-2.84
0
1.5
1
0.5
Deviatoric strain
X 10
Figure 4.7: Discrete a) deviatoric stress and b) pressure relaxations are not reversible upon unloading.
Circles on lines represent values from individual system configurations.
49
Internal structural rearrangement accompanies discrete stress relaxation
2.5
0
CL
U
difference
in atomic
positions
due to
discrete
.5
En
0
-0
1 -stress
relaxation
'0
.5-
w
0
0.5
1.5
1
Deviatoric strain
x 10-
Figure 4.8: Comparing positions of atoms in a-Si samples that are similarly strained but correspond to the
loading and unloading branches of figure 4.7 reveals that an internal structural rearrangement accompanies
the discrete stress relaxation. Distances are normalized by the characteristic length of the Stillinger-Weber
potential (section 3.1).
4.2.3 Deformation to large strain
If a large number of strain increments is applied to an a-Si system, multitudes of
discrete stress relaxations such as those described in section 4.2.2 are observed. From the
aggregation of these stress relaxations, certain characteristics of the material's
macroscopic plastic deformation behavior become immediately recognizable (figures 4.9
and 4.10).
50
Loading and unloading of a-Si
2
1.8
1.6
1.4
Steady state plastic flow
C,)
C,)
U)
0
19
1
0.8
Stress relaxations occur before steady state flow
0.4 -0.4
Bauschinger effect
0.2 -M.0
0
-
0.01
0.02
loading
--- unloading
0.04
0.03
0.05
0.06
0.07
Deviatoric strain
Figure 4.9: The system-wide
loading and unloading behavior of a-Si is an "ensemble average" of individual
irreversible stress relaxation events.
The variation of deviatoric stress with loading (figure 4.9) clearly illustrates the
eventual attainment of a steady state flow state corresponding to plastic flow. No distinct
yielding point can be discerned, however, because of the small stress relaxation events
that occur even far below the level of deviatoric stress reached at steady state flow.
Unloading reveals a clear Bauschinger effect, indicating that residual backstresses are
accumulated in the system during plastic deformation. A state of zero deviatoric stress is
not reached upon unloading because of the pronounced effect of atomic level stress
variations on the overall system stress in an a-Si structure this small in size.
The interpretation of variation of system pressure with loading and unloading
(figure 4.10) proves to be more problematic than the interpretation of variation in
deviatoric stress. In particular, while the latter reaches a steady state flow condition at a
deviatoric strain level of about 1-2%, the former never attains steady state. Furthermore, a
51
distinct asymmetry exists between the pressure profiles for loading and unloading. The
explanation of these issues is a topic in the author's doctoral research.
Loading and unloading of a-Si
-1.2I
-1.4
-1.6
1.80-
C')
-2-2.2
0-
-2.4
-2.6
-2.8
-
---3'
C
0.01
0.02
0.03
0.05
0.04
Deviatoric strain
0.06
loading
unloading
0.07
0.08
Figure 4. 10: The system pressure profile fails to achieve steady state even after the deviatoric stress profile
has achieved it.
4.3 Irreversible deformation: atomic level
Discrete stress relaxations have been shown to reproduce the macroscopic stressstrain features of plastic response. These events were accompanied by irreversible
internal structural changes. In this section we clarify the nature of the collective atomic
rearrangements that accompany discrete stress relaxation events.
4.3.1 Kinematics of transformation
The method for finding atomic level strain increments described in section 3.4.2
can be applied to any two system configurations. Once a set of atomic strain increments
52
is found, the hydrostatic and deviatoric components can be computed (section 3.4.3).
Since plastic deformation in other disordered materials was found to be a localized
shearing process (section 2.3), the atomic deviatoric strain increment can be viewed as a
good measure of the intensity of a given atomic environment's contribution to the
structural rearrangement accompanying discrete stress relaxation.
10C4
10
Comparison of intesity in atomic rearrangment for elastic and plastic deformation
......
......
...
...
...
....
...
...
...
. . ..........
elastic
...
...
.
....
..
..
...
....
...
........
....
...
...
....
...
..
.....
.
plastic
...
...
.......
...
..
..
........
....
...
...
...
..
..
...
..... ..
.....
...
.
....
...
...
...
.... ...
.
....
..
..
....
....
.....
.......
-- --- ------7
7.....
..........
. . . .. . . .. . .
...........
..........
..... ..
...........
................: .......
......... ......
............. ... ...
........
U10
.............
................
....
...
.....
..
.......
.......... ......
......
...................
.....
.....
......... ...
...........
......
...........
............ ..........
.....
. ....... ....
.........
......... . ......
.. ...... ..
...... .......
.. .........
..... .....
. .....
..........
..........
...
...... .... .
..... .... .
..... ..
... ...... .
........
.
......
0
..........
. .........
........ ...
.. ......
....... ...
......
.......
.... ...
........
.
...
............. ..
......
.............
.... .....
...
................
....................
......
...
... .. .
....
..............
......
. ......... .... .. .
..........
.. ...... ..
. ....... ...
.........
..........
...........
.. ........
... .
......
........ . .
.
........ .......
.......
.......
. ..... .
.
........ ..
....... ...
....
...........
.....
...
...........
.........
........ ......
100
...... ..
...
.. ... .....
......
...........
....
..
..
...
.
77 ...........
.......
..
I..
......
......
......
HJ]ah_ -s
:sf a in 76U
......
..
..........
....
............
......
...........
. .....
.......
.
...
...
......
..
...............
.............
.....
...
..........
Ai
10 5
10~4
10-2
10-3
10
100
Deviatoric strain
Figure 4.11: Atomic deviatoric strain increments are much higher for a-Si configurations undergoing stress
relaxation than for those being deformed elastically. Distributions have been normalized to unity.
Figure 4.11 shows distributions of atomic deviatoric strain increments computed
for a pair of structures that are elastically (reversibly) deformed versions of each other as
well as for a pair of which one corresponds to a configuration immediately preceding and
the other immediately succeeding a stress relaxation. The atomic deviatoric strains in the
latter are on average larger than those in the former by about two orders of magnitude.
Moreover, while the deviatoric strains of the majority of atoms fall into the low-strain
regime (<10-), there is a small number of atoms whose deviatoric strains are much larger
53
than of the rest. These "outliers" in the atomic deviatoric strain distributions indicate
atomic environments where atomic rearrangement is concentrated during a stress
relaxation.
4.3.2 Visualization of transformation
The analysis of section 4.3.1 can be used in visualizing the geometrical character
of individual stress relaxations. Figure 4.12 shows a cluster of atoms containing only
atoms of highest deviatoric strain increment for a pair of a-Si configurations
corresponding to a stress relaxation. Clearly, the atomic rearrangements during discrete
plastic deformation events are highly localized in a well-defined region of space.
4.3 nm
Figure 4.12: Atoms whose environments undergo the largest deviatoric strain increment during a plastic
stress relaxation are well localized within the system configuration.
Figure 4.13 is a visualization of the region of highest atomic rearrangements for a
stress relaxation in a system of 1000 atoms (as opposed to the 4096 used in all other
54
situations). Here the deformation is also highly localized, but it is not contained within a
closed region. Instead, it connects across the periodic boundary walls of the simulation
cell. This phenomenon is due to the excessively small system size and the strength of the
resulting elastic fields generated by periodic images of regions where deformation
localized. It has been observed before in glassy polymers (Mott et al. [1993]).
2.2 nm
Figure 4.13: For a system consisting of 1000 atoms, regions of highest shearing during plastic stress
relaxation connect across periodic boundary walls.
This connecting across periodic boundary walls of plastically transforming
regions was the motivating reason behind choosing a larger, 4096-atom system for the
research presented here. The atomic deviatoric strain increment characterization of the
kinematics of plastic transformation is therefore a useful tool in not only visualizing the
nature of atomic rearrangements accompanying discrete stress relaxation, but also
provides a means for detecting artifacts resulting from system size effects and the
accompanying elastic image forces.
55
4.3.3 Analysis
Characterization based on atomic deviatoric strain increments allows for the
visualization of transforming regions and the extraction of qualitative information. A
more quantitative account of the kinematics of plastic deformation, however, requires
making an objective choice for the cutoff atomic deviatoric strain increment below which
atomic environments are not seen as participating in the rearrangements leading to
discrete stress relaxation. This choice was made individually for each event based on the
variation with the cutoff deviatoric strain of the stresses and potential energy per atom
associated with the transforming region.
By choosing a cutoff atomic deviatoric strain increment, a certain number of
atomic environments are marked as being within a transforming region while the other
ones are considered to be outside it. The stresses and potential energies per atom of these
regions can then be evaluated. As the cutoff deviatoric strain increment decreases, the
number of atoms participating in a transformation increases. Thus-via the cutoff
deviatoric strain increment-a correspondence can be drawn between the number of
atoms participating in an irreversible rearrangement and the stresses and potential
energies per atom associated with that rearrangement.
Figure 4.14 plots the number of atoms against the differences in pressure and potential
energy per atom for a typical pair of a-Si structures associated with a discrete plastic
event. For small numbers of participating atoms, the pressure and potential energy per
atom differences vary erratically. For large numbers, however, the variation dies down. A
certain "participation number" of atoms can be chosen that separates the regime of erratic
variation of pressure and potential energy per atom differences from their smooth
behavior. This participation number is an estimate for the size of the transforming
regions. For the relaxations observed, it was found to lie between 100 and 500 atoms per
event.
56
Pressure change as a means to finding the size of a transforming region
Approximate size of transforming region
a)
C.
0)
C
E
8
'qO.5
L)
2!
C
C
-0.5
0
200
400
600
800
1000
1200
1400
1600
1800
2000
Number of atoms in the transforming region
Change of potential energy per atom as a means to finding the size of a transforming region
C7
.2
0
E)
0)
E
1
CD
W
C
3-0.03 I
Approximate size of transforming region
b)
00
C)
0
200
400
1200
1400
1600
800
1000
600
Number of atoms in the transforming region
1800
2000
Figure 4.14: Differences in a) pressure and b) potential energy per atom inside a transforming region
between the atomic configuration immediately before and after a plastic stress relaxation help to determine
the size of the transforming region. Atoms with environments of highest deviatoric strain increment are
included in the transforming region first. The region is then enlarged by including atomic environments of
ever lower deviatoric strain increments. The size of the transforming region is taken to be the number of
atoms at which pressure and potential energy per atom differences cease to vary erratically.
57
With an estimate for the size of transforming regions and the degree of the
accompanying deviatoric and hydrostatic stress relaxation, the distribution of deviatoric
and hydrostatic transformation strains for discrete relaxation events can be found. We use
the formulas (Argon [1996])
s)'stem
A
event
8 dev
A__event
hyd
_
A
N event
N\
C
system
dev
system
A07,hyd
system
N event
B
where B = 106GPa and u = 33GPa are the bulk and shear moduli of SW a-Si,
respectively (Kluge and Ray [1988]). N denotes the number of atoms in a given
collection. Deviatoric transformation strains were found to be distributed between 0.01
and 0.35. Hydrostatic strains fell into the -0.7-0.1 range.
The localization of atoms that are highly active in a plastic rearrangement process
within a well-defined region of space (figure 4.12) lends itself well to approximating that
region of space as an ellipsoid (as has been done before in continuum models of plastic
transformation (Argon and Shi [1982])). Such an approximation allows for a quantitative
characterization of the dimensions of the region along its principal directions as well as of
its orientation with respect to the applied stress field.
The approximation described above was made by matching the moment of inertia
of a transforming region with the moment of inertia of a similarly oriented ellipsoid.
Once the atoms participating in a plastic transformation were determined, the components
of the inertia tensor for that region were found according to the formula
N
I'
=
Z
(r 28.k
i=1
-
Xi 1 Xik
4.1
where N is the number of participating atoms. mi and ri are the mass and distance from
the origin of atom i. xi j is the j-component of the ith atom's position. The full inertia
tensor for a transforming region was diagonalized to extract the orientation of the region
58
in the ellipsoid approximation. For the events analyzed, however, no preferential
orientation was found.
The diagonal form for the inertia tensor of an ellipsoid with semi-axes denoted by
ax, ay, and az is
I,=(a2+ af2
Similar expressions hold for Iy and I. These relations can be inverted to give the semiaxes of an ellipsoid with principal moments Ix, Iy, z:
ax =
X(gbI,
+ IZ
,
Thus, the diagonal elements of the inertia tensor for a transforming region (calculated
according to 4.1) can be used to find an "equivalent oriented ellipsoid" that provides an
estimate for the length scale and shape of that region. It was found that these equivalent
oriented ellipsoids generally had the shape of filaments, i.e. they had one long semi-axis
and two shorter semi-axes of equal length. The former had lengths in the interval 1.02.5nm and the latter in the interval 0.7-1.8nm.
59
5. Conclusions
The computer investigation of plastic deformation in amorphous silicon presented
here has yielded the following results:
" Plastic deformation occurs as a series of discrete stress relaxations, much as has
been observed in glassy metals and polymers.
*
Individual stress relaxations are accompanied on the atomic level by highly
localized shearing events involving 100-500 atoms and occurring within roughly
ellipsoidal regions.
" The length scales involved in the kinematics of atomic rearrangements appear to
be within the 0.7-2.5nm range.
The findings presented here have important consequences in the study of
irreversible deformation in highly confined covalently bonded intergranular material. In
particular, since the thickness of such confined films is in the 0.2-1nm range, it can be
concluded that the mechanism responsible for plastic deformation in bulk amorphous
covalently bonded materials cannot operate in such a setting.
60
6. Acknowledgements
The author would like to acknowledge the invaluable contribution made by Ali S.
Argon to the research presented here. Without his wisdom, experience, intuition, and
constant guidance none of it would have been possible.
For their tutelage, insights, and technical expertise the author would like to
acknowledge N. Hadjiconstantinou, V. Yamakov, D. Wolf, J. Li, S. Yip, D. Parks, M.
Bazant, N. Marzari, and L. Anand. My gratitude is also due to R. Sharma and M.
Zimmermann for countless discussions.
61
7. References
Abell, G. C., 1985, Phys. Rev. B31, 6184
Allen, M. P., and Tildesley, D. J., 2000, Computer Simulation of Liquids, Oxford
University Press, Oxford, England
Angell, C. A., Borick, S., Grabow, M., 1996, J. Non-cryst. Sol. 205-207, 463
Argon, A. S., and Kuo, H. Y., 1979, Mat. Sci. Eng. 39, 101
Argon, A. S., 1981, in Dislocation Modelling of Physical Systems, ed. Ashby, M. F.,
Bullough, R., Hartley, C. S., Hirth, J. P., Pergamon Press, Oxford, England
Argon, A. S., and Shi, L. T., 1982, Acta Metall. 31, 499
Argon, A. S., and Shi, L. T., 1983, in Amorphous Materials: Modeling of Structure and
Properties, ed. Vitek, V., 279
Argon, A. S., 1996, in Physical Metallurgy, ed. Cahn, R. W., Haasen, P., North-Holland,
Amsterdam
Argon, A. S., and Veprek, S., 2002, Mat. Res. Soc. Symp. Proc. Vol. 697, P1.2
Balamane, H., Halicioglu, T., Tiller, W. A., 1992, Phys. Rev. B46, 2250
Bazant, M. Z., Kaxiras, E., Justo, J. F., 1997, Phys. Rev. B56, 8542
Bertsekas, D. P., 1999, Nonlinear Programming, Athena Scientific, Belmont, MA
Brent, R. P., 1973, Algorithms for Minimization without Derivatives, Prentice-Hall,
Englewood Cliffs, NJ
Broughton J. Q., Li, X. P., 1987, Phys. Rev. B35, 9120
Brown, D., Neyertz, S., 1995, Mol. Phys. 84, 577
Bulatov, V. V., Argon, A. S., 1994, Mod. Simul. Mater. Sc. 2, 167; 185; 203
Chaudhari, P., Levi, A., Steinhardt, P., 1979, Phys. Rev. Lett. 43, 1517
Cherns, D., Jenkins, M. L., White, S., 1980, in Electron Microscopy and Analysis 1979,
Inst. Phys.: London
Cohen, M. H., and Turnbull, D., 1959, J. Chem. Phys. 31, 1164
Conrad, H., 1963, The Relation between the Structure and Mechanical Properties of
Metals, Proceedings of the conference held at the National Physical Laboratory,
Teddington, Middlesex on the 7 ', 8t and 9 th January, 1963, Her Majesty's Stationary
Office, London.
Davidovic, M., Stojic, M., Jovic, Dj., 1983, J. Phys. C16, 2053
De Berg, M., Van Kreveld, M., Overmars, M., Schwarzkopf, 0., 2000, Computational
Geometry: Algorithms and Applications, Springer, Berlin
Deng, D., Argon, A. S., Yip, S., 1989, Phil. Trans. R. Soc. Lond. A329, 549; 575; 595;
613
Evans, D. J., and Morriss, G. P., 1983, Phys. Lett. 98A, 433
Evans, D. J., and Morriss, G. P., 1984, Comput. Phys. Rep. 1, 297
Eyring, H., 1936, J. Chem. Phys. 4, 283
Furukawa, K., Shimbo, M., Fukuda, K., Tanzawa, K., 1986, Extended Abstracts of the
18th (1986 International) Conference on Solid-State Devices and Materials, Tokyo, B9-1 (pp.533-536)
Gilman, J. J., 1968, in Dislocation Dynamics, ed. A. R. Rosenfield et al., McGraw-Hill,
New York
62
Haile, J. M., 1997, Molecular Dynamics Simulation: Elementary Methods, John Wiley &
Sons
Hall, E. 0., 1951, Proc. Phys. Soc. London B64, 747
Hoover, W. G., 1983, A. Rev. Phys. Chem. 34, 103
Huang, K., 1987, Statistical Mechanics, John Wiley & Sons, New York
Hutnik, M., Gentile, F. T., Ludovice, P. J., Suter, U. W., Argon, A. S., 1991,
Macomolecules 24, 5962; 5970
Justo, J. F., Bazant, M. Z., Kaxiras, E., Bulatov, V. V., Yip, S., 1998, Phys. Rev.
B58, 2539
Kantor, Y., and Webman, I., 1984, Phys. Rev. Lett. 52, 1891
Kauzmann, W., 1948, Chem. Rev. 43, 219
Keblinski, P., Phillpot, S. R., Wolf, D., Gleiter, H., 1996a, Acta. Mater. 45, 987
Keblinski, P., Phillpot, S. R., Wolf, D., Gleiter, H., 1996b, Phys. Rev. Lett. 77, 2965
Keblinski, P., Bazant, M. Z., Dash, R. K., Treacy, M. M., 2002, Phys. Rev. B66, 064104
Kluge, M. D., and Ray, J. R., 1988, Phys. Rev. B37, 4132
Laaziri, K., Kycia, S., Roorda, S., Chicoine, M., Robertson, J. L., Wang, J., Moss, S. C.,
1999, Phys. Rev. Lett. 82, 3460
Luedtke, W. D., Landman, U., 1989, Phys. Rev. B40, 1164
Lund, A. C., Schuh, C. A., 2003, Acta. Mater. 51, 5399
McClintock, F. A., and Argon, A. S., 1966, Mechanical Behavior of Materials, AddisonWesley, Reading, MA
Mott, P. H., Argon, A. S., Suter, U. W., 1992, J. Comput. Phys. 101, 140
Mott, P. H., Argon, A. S., Suter, U. W., 1993, Phil. Mag. A 67, 931
Nakhmanson, S. M., Mousseau, N., 2002, J. Phys.-Condens. Mat. 14, 6627
Olmsted, D. L., Hardikar, K. Y., Phillips, R., 2001, Mod. Simul. Mater. Sc. 9, 215
Petch, N. J., 1953, J. Iron Steel Inst. 174, 25
Phillips, J. C., 1979, J. Non-cryst. Solids 34, 153
Phillips, J. C., 198 1a, J. Non-cryst. Solids 43, 37
Phillips, J. C., 198 1b, J. Non-cryst. Solids 44, 17
Phillpot, S. R., Yip, S., Wolf, D., 1989, Computers in Physics Nov-Dec, 20
Polak, E., and Ribiere, G., 1969, Rev. Fr. Inform. Rech. 0. 3, 35
Ren, Q., Joos, B., Duesbery, M. S., 1995, Phys. Rev. B52, 13223
Rose, H., Smith, J. R., Ferrante, 1983, J., Phys. Rev. B28, 1835
Schiotz, J., Di Tolla, F. D., 1998, Jacobsen, K. W., Nature 391, 561
Schiotz, J., and Jacobsen, K. W., 2003, Science 301, 1357
Stillinger, F. H., Weber, T. A., 1983, Phys. Rev. A28, 2408
Stillinger, F. H., Weber, T. A., 1985, Phys. Rev. B31, 5262
Tanemura, M., Ogawa, T., Ogita, N., 1983, J. Comput. Phys. 51, 191
Tersoff, J., 1986, Phys. Rev. Lett. 56, 632
Theodorou, D. N., Suter, U. W., 1985, Macromolecules 18, 1467
Theodorou, D. N., Suter, U. W., 1986, Macromolecules 19, 379
Thorpe, M. F., Jacobs, D. J., Chubynsky, M. V., Phillips, J. C., 2000, J. Non-cryst. Solids
266-269, 857
Thompson, M. 0., Galvin, G. J., Mayer, J. W., Peercy, P. S., Poate, J. M.,
Jacobson, D. C., Cullis, A. G., Chew, N. G., 1984, Phys. Rev. Lett. 52, 2360
Turnbull, D., Cohen, M. H., 1958, J. Chem. Phys. 29, 1049
63
Turnbull, D., Cohen, M. H., 1961, J. Chem. Phys. 34, 120
Van Vliet, K. J., Suresh, S., 2002, Phil. Mag. A82, 1993
Veprek, S., Argon, A. S., 2002, J. Vac. Sci. Technol. B20, 650
Wolf, D., Wang, J., Phillpot, S. R., Gleiter, H., 1995, Phys. Lett. A205, 274
Wooten, F., Winer, K., Weaire, D., 1985, Phys. Rev. Lett. 54, 1392
Yamakov, V., Wolf, D., Phillpot, S. R., Mukherjee, A. K., Gleiter, H., 2001, Acta.
Mater. 49, 2713
Yamakov, V., Wolf, D., Phillpot, S. R., Mukherjee, A. K., Gleiter, H., 2002,
Nature Materials 1, 1
Yip, S., 1998, Nature 391, 532
Zachariasen, W. H., 1932, J. Am. Chem. Soc. 54, 3841
Zallen, R., 1979, in Fluctuation Phenomena, ed. E. W. Montroll, North-Holland, New
York
Ziman, J. M., 1995, Principles of the Theory of Solids, Cambridge University Press,
Cambridge, England
64