Electronic Journal of Differential Equations, Vol. 2013 (2013), No. 262,... ISSN: 1072-6691. URL: or
advertisement
, No. 262,... ISSN: 1072-6691. URL: or")
Electronic Journal of Differential Equations, Vol. 2013 (2013), No. 262, pp. 1–16.
ISSN: 1072-6691. URL: http://ejde.math.txstate.edu or http://ejde.math.unt.edu
ftp ejde.math.txstate.edu
PERSISTENCE AND EXTINCTION FOR A STOCHASTIC
LOGISTIC MODEL WITH INFINITE DELAY
CHUN LU, XIAOHUA DING
Abstract. This article, studies a stochastic logistic model with infinite delay. Using a phase space, we establish sufficient conditions for the extinction,
nonpersistence in the mean, weak persistence, and stochastic permanence. A
threshold between weak persistence and extinction is obtained. Our results
state that different types of environmental noises have different effects on the
persistence and extinction, and that the delay has no impact on the persistence
and extinction for the stochastic model in the autonomous case. Numerical
simulations illustrate the theoretical results.
1. Introduction
For the previous decades, the logistic equation with delays have received great
attention due to their extensive application as models in a variety of scientific areas,
such as population dynamics, biology and epidemiology. A classical logistic model
with infinite delay can be expressed as follows
Z 0
h
i
dx(t)/dt = x(t) r(t) − a(t)x(t) + b(t)x(t − τ ) + c(t)
x(t + θ)dµ(θ) dt, (1.1)
−∞
where τ ≥ 0 represents time delay and µ(θ) is a probability measure on (−∞, 0].
There is an extensive literature concerned with systems similar to (1.1). Regarding
persistence, extinction, global attractivity and other dynamics, mention among
others: Golpalsamy [1, 2], Kuang and Smith [3], Freedman and wu [4], Kuang [5]
and Lisena [6]. Particularly, the book by Gopalsamy [2] is a good reference in this
area.
However, population models are always affected by environmental noises. Therefore stochastic population models have been recently investigated by many authors
(see e.g.,[7]-[15]). In particular, May [10] has revealed that due to environmental
noises, the growth rate, interaction coefficient and so on should be stochastic. Suppose that the growth rate r(t) and the competition coefficient a(t) are affected by
environmental noises, with
r(t) → r(t) + σ1 (t)ω̇1 (t),
−a(t) → −a(t) + σ2 (t)ω̇2 (t),
2000 Mathematics Subject Classification. 64H40, 92D25, 60H10, 34K50.
Key words and phrases. White noise; persistence; extinction; delay.
c
2013
Texas State University - San Marcos.
Submitted September 19, 2013. Published November 26, 2013.
1
2
C. LU, X. DING
EJDE-2013/262
where σi (t) are continuous positive bounded function on R+ and σi2 (t) represents
the intensity of the white noise at time t; ω̇i (t) are the white noise, namely wi (t)
is a Brownian motion defined on a complete probability space (Ω, F, P) with a
filtration {Ft }t∈R+ satisfying the usual conditions (i.e., it is right continuous and
increasing while F0 contains all P-null sets), where R+ = [0, +∞), i = 1, 2. Then
the corresponding stochastic system takes the form
Z 0
i
h
x(t + θ)dµ(θ) dt
dx(t)/dt = x(t) r(t) − a(t)x(t) + b(t)x(t − τ ) + c(t)
(1.2)
−∞
2
+ σ1 (t)x(t)dω1 (t) + σ2 (t)x (t)dω2 (t).
Here, we let the initial data ξ be positive and belong to the phase space Cg (see
[3, 16, 17]) which is defined as
Cg = {ϕ ∈ C((−∞, 0]; R) : kϕkcg =
ers |ϕ(s)| < +∞},
sup
−∞<s≤0
where g(s) = e−rs , r > 0. Furthermore, Cg is an admissible Banach space (see
[3, 17]).
Model (1.2) describes population dynamics; so it is very important to investigate
the survival of the logistic population which involve extinction, nonpersistence in
the mean, weak persistence, stochastic permanence and threshold between nonpersistence in the mean and weak persistence. Liu and Wang [18] also pointed out
that it is a interesting problem to consider the persistence and extinction of logistic
model with infinite delay. As far as we know, there are few results of this aspect
for model (1.2). The aims of this paper are to investigate the problems above. In
addition, we investigate them at the phase space Cg , which is one of the most important phase space in discussing functional differential equations with infinite delay
and can avoid the usual well-posedness questions related to functional equations of
unbounded delay (see e.g.,[3, 16, 19]).
To study model (1.2) we assume the following:
(A1) the functions r(t), a(t), b(t) and c(t) are bounded and continuous on R+ ,
and inf t∈R+ a(t) > 0.
(A2) µ satisfies
Z 0
µr =
e−2rθ dµ(θ) < +∞.
−∞
Assumption A2 is satisfied when µ(θ) = ekrθ (k > 2) for θ ≤ 0, so there exists a
large number of these probability measures.
For simplicity, we define the following symbols:
Z
1 t
l
u
x(s)ds,
f = sup f (t), f = inf f (t), hx(t)i =
t 0
t∈R+
t∈R+
x∗ = lim inf x(t),
t→+∞
x∗ = lim sup x(t),
d¯ = lim sup t−1
t→+∞
t→+∞
Z t
r(s) −
0
R+ = (0, +∞),
σ12 (s) ds.
2
The following definitions are commonly used and we list them here.
(1) The population x(t) is said to have extinction if limt→+∞ x(t) = 0.
(2) The population x(t) is said to have nonpersistence in the mean [20] if
lim supt→+∞ hx(t)i = 0.
EJDE-2013/262
PERSISTENCE AND EXTINCTION
3
(3) The population x(t) is said to have weak persistence if lim supt→+∞ x(t) >
0, see [21, 22].
(4) Population x(t) is said to have stochastic permanence [23] if for arbitrary
ε > 0, there are constants β > 0, M > 0 such that
lim inf P{x(t) ≥ β} ≥ 1 − ε and
t→+∞
lim inf P{x(t) ≤ M } ≥ 1 − ε.
t→+∞
From the above definitions it follows that: stochastic permanence implies stochastic
weak persistence, extinction implies stochastic non-persistence in the mean. But
generally, their reverses are not true.
The rest of this article is arranged as follows. In Section 2, we show that model
(1.2) has a unique positive global solution. Afterward, sufficient criteria for extinction, nonpersistence in the mean, weak persistence and stochastic permanence
are established in Section 3. Section 4 presents some figures to illustrate the main
results. We close this article with some conclusions and remarks.
2. Positive and global solutions
As the state x(t) of model (1.2) is the size of the population in the system, it
should be nonnegative. In this section we shall show that the solution of model
(1.2) has a unique global positive solution.
Wei [24, 25, 26] and Xu [27, 28] proved that, in order for a stochastic functional
differential equations with infinite delay to have a unique global solution for any
given initial data ξ ∈ Cg , the coefficients of the equation are generally required
to satisfy the linear growth condition and the local Lipschitz condition. The local
Lipschitz condition guarantees that the unique solution exists in (−∞, τe ), where
τe is the explosion time (see [11]). Clearly, the coefficients of (1.2) satisfy the local
Lipschitz condition, but do not satisfy the linear growth condition.
Theorem 2.1. Let (A1) and (A2) hold. Then, for any given positive initial value
ξ ∈ Cg , there is a unique global solution x(t) to model (1.2) for t ∈ R and the
solution will remain in R+ with probability 1, namely x(t) ∈ R+ for all t ∈ R
almost surely.
Proof. Since the coefficients of the equation are locally Lipschitz continuous, for
any given positive initial value ξ ∈ Cg , there is a unique local solution x(t) on
t ∈ (−∞, τe ), where τe is the explosion time. To show this solution is global, we
need to show that τe = +∞ a.s. Let k0 > 0 be sufficiently large such that
1
< min ξ(θ) ≤ max ξ(θ) < k0 .
−∞<θ≤0
−∞<θ≤0
k0
For each integer k ≥ k0 , define the stopping time
1
τk = inf t ∈ (−∞, τe ) : x(t) ≤ or x(t) ≥ k .
k
Clearly, τk is increasing as k → +∞. Set τ+∞ = limk→+∞ τk , whence τ+∞ ≤ τe
a.s. for all t ≥ 0. If we can show that τ+∞ = +∞ a.s., then τe = +∞ a.s. and
x(t) ∈ R+ a.s. In other words, to complete the proof all we need to show is that
τ+∞ = +∞√a.s. To show this statement, let us define a C 2 -function V : R+ → R+
by V (x) = x − 1 − 0.5 ln x. Let k ≥ k0 and T > 0 be arbitrary. For 0 ≤ t ≤ τk ∧ T ,
4
C. LU, X. DING
we can apply the Itô’s formula to
Rt
t−τ
EJDE-2013/262
x2 (s)ds + V (x(t)) to obtain
hZ t
i
d
x2 (s)ds + V (x(t))
t−τ
2
= x (t) − x2 (t − τ ) dt + 0.5 x−0.5 (t) − x−1 (t) x(t)
Z 0
h
× r(t) − a(t)x(t) + b(t)x(t − τ ) + c(t)
x(t + θ)dµ(θ) dt
−∞
i
+ σ1 (t)dw1 (t) + σ2 (t)x(t)dw2 (t) + 0.5 − 0.25x−1.5 (t) + 0.5x−2 (t) σ12 (t)x2 (t)dt
+ 0.5 − 0.25x−1.5 (t) + 0.5x−2 (t) σ22 (t)x4 (t)dt
= x2 (t) − x2 (t − τ ) dt + 0.5r(t)[x0.5 (t) − 1]dt − 0.5a(t)[x0.5 (t) − 1]x(t)dt
Z 0
0.5
0.5
+ 0.5b(t)x(t − τ )[x (t) − 1]dt + 0.5c(t)[x (t) − 1]
x(t + θ)dµ(θ)dt
−∞
+ 0.5 − 0.25x−1.5 (t) + 0.5x−2 (t) σ12 (t)x2 (t)dt + 0.5 − 0.25x−1.5 (t)
+ 0.5x−2 (t) σ22 (t)x4 (t)dt + 0.5[x0.5 (t) − 1]σ1 (t)dw1 (t) + 0.5 x1.5 (t)
− x(t) σ2 (t)dw2 (t)
= x2 (t) − x2 (t − τ ) dt + 0.5r(t)[x0.5 (t) − 1]dt − 0.5a(t)[x0.5 (t) − 1]x(t)dt
+ 0.0625b2 (t)[x0.5 (t) − 1]2 dt + 0.0625c2 (t)[x0.5 (t) − 1]2 dt
Z 0
+
x2 (t + θ)dµ(θ)dt + x2 (t − τ )dt
−∞
+ 0.5 − 0.25x−1.5 (t) + 0.5x−2 (t) σ12 (t)x2 (t)dt
+ 0.5 − 0.25x−1.5 (t) + 0.5x−2 (t) σ22 (t)x4 (t)dt
+ 0.5[x0.5 (t) − 1]σ1 (t)dw1 (t) + 0.5 x1.5 (t) − x(t) σ2 (t)dw2 (t)
h
= x2 (t) + 0.25σ12 (t) + 0.25σ22 (t)x2 (t) + 0.5r(t) x0.5 (t) − 1
2
− 0.5a(t) x0.5 (t)dt − 1 x(t) + 0.0625b2 (t) x0.5 (t) − 1 − 0.125σ22 (t)x2.5 (t)
Z 0
i
2
2
0.5
+ 0.0625c (t) x (t) − 1 +
x2 (t + θ)dµ(θ) − 0.125σ12 (t)x1.5 (t) dt
−∞
(t) − 1]σ1 (t)dw1 (t) + 0.5[x1.5 (t) − x(t)]σ2 (t)dw2 (t),
Z 0
= F (x)dt +
x2 (t + θ)dµ(θ)dt − x2 (t)dt + 0.5[x0.5 (t) − 1]σ1 (t)x(t)dw1 (t)
+ 0.5[x
0.5
−∞
+ 0.5[x0.5 (t) − 1]σ2 (t)x2 (t)dw2 (t)
where
F (x) = 0.25σ12 (t) + 0.25σ22 (t)x2 (t) + 0.5r(t)[x0.5 (t) − 1] − 0.5a(t)[x0.5 (t) − 1]x(t)
+ 0.0625b2 (t)[x0.5 (t) − 1]2 + 0.0625c2 (t)[x0.5 (t) − 1]2
+ 2x2 (t) − 0.125σ12 (t)x1.5 (t) − 0.125σ22 (t)x2.5 (t).
EJDE-2013/262
PERSISTENCE AND EXTINCTION
5
Under assumptions (A1)–(A2), it is easy to see that F (x) is bounded, say by K, in
R+ . We therefore obtain that
hZ t
i
d
x2 (s)ds + V (x(t))
t−τ
Z
0
x2 (t + θ)dµ(θ)dt − x2 (t)dt + 0.5[x0.5 (t) − 1]σ1 (t)dw1 (t)
≤ Kdt +
+ 0.5[x
−∞
1.5
(t) − x(t)]σ2 (t)dw2 (t).
Integrating both sides from 0 to t, and then taking expectations, yields
hZ t
i
E
x2 (s)ds + V (x(t))
Z
t−τ
0
Z tZ
x2 (s)ds + V (x(0)) + Kt + E
≤
−τ
0
x2 (s + θ)dµ(θ)ds − E
−∞
0
Z
t
x2 (s)ds.
0
Moreover, we obtain that
Z tZ 0
x2 (s + θ)dµ(θ)ds
−∞
0
=
Z thZ
Z
2
t
=
0
Z
i
x2 (s + θ)dµ(θ) ds
−s
−s
hZ
ds
≤ kξk2Cg
0
x (s + θ)dµ(θ)ds +
−∞
0
Z
−s
e2r(s+θ) x2 (s + θ)e−2r(s+θ) dµ(θ) +
−∞
t
−2rs
e
Z
0
ds
e−2rθ dµ(θ) +
−∞
0
≤ kξk2Cg µr t +
Z
Z
Z
0
−t
Z t
0
dµ(θ)
−∞
Z
t
dµ(θ)
x2 (s + θ)ds
−θ
x2 (s)ds
0
t
x2 (s)ds.
0
Consequently,
hZ t
i Z
E
x2 (s)ds + V (x(t)) ≤
0
−τ
t−τ
x2 (s)ds + V (x(0)) + Kt + kξk2Cg µr t.
Letting t = τk ∧ T , we obtain
h Z τk ∧T
i
E
x2 (s)ds + V (x(τk ∧ T ))
Z
≤
τk ∧T −τ
0
2
−τ
x (s)ds + V (x(0)) + KE(τk ∧ T ) + kξk2Cg µr (τk ∧ T ).
Therefore,
Z
0
EV (x(τk ∧ T )) ≤
−τ
x2 (s)ds + V (x(0)) + KT + kξk2Cg µr T.
Note that for every ω ∈ {τk ≤ T }, x(τk , ω) equals either k or
V (x(τk , ω)) is no less than either
√
k − 1 − 0.5 log(k)
1
k,
(2.1)
and hence
6
C. LU, X. DING
or
r
1
1
− 1 − 0.5 log( ) =
k
k
EJDE-2013/262
r
1
− 1 + 0.5 log(k).
k
Consequently,
√
r
V (x(τk , ω)) ≥ [ k − 1 − 0.5 log(k)] ∧ [
1
− 1 + 0.5 log(k)].
k
From (2.1) it follows that
Z 0
x2 (s)ds + V (x(0)) + KT + kξk2Cg µr T
−τ
≥ E[1{τk ≤T } (ω)V (x(τk , ω))]
√
≥ P {τk ≤ T }([ k − 1 − 0.5 log(k)] ∧ [
where 1{τk ≤T }
r
1
− 1 + 0.5 log(k)]),
k
is the indicator function of {τk ≤ T }. Letting k → ∞ gives
lim P {τk ≤ T } = 0
k→+∞
and hence P {τ+∞ ≤ T } = 0. Since T > 0 is arbitrary, we must have
P {τ+∞ < +∞} = 0,
so P {τ+∞ = +∞} = 1 as required.
3. Persistence and extinction for model (1.2)
From Theorem 2.1 we know that solutions of (1.2) will remain in the positive
cone R+ . This nice property provides us with a great opportunity to construct
different types of Lyapunov functions to discuss how the solutions vary in R+ in
more details. In this section, we shall study the persistence and extinction of model
(1.2).
Theorem 3.1. Let assumption (A1) and (A2) hold. If d¯ < 0 and inf t∈R+ {a(t) −
b(t + τ ) − cu } ≥ 0, then the population x(t) modeled by (1.2) approaches extinction
a.s.
Proof. Applying Itô’s formula to (1.2) leads to
Z t
d
b(s + τ )x(s)ds + d ln x(t)
t−τ
h
σ 2 (t)
= (b(t + τ )x(t) − b(t)x(t − τ ))dt + r(t) − 1
− a(t)x(t) + b(t)x(t − τ )
2
Z 0
σ 2 (t)(t)x2 (t) i
+ c(t)
x(t + θ)dµ(θ) − 2
dt + σ1 (t)dω1 (t) + σ2 (t)x(t)dω2 (t).
2
−∞
Then we have
Z t
Z
b(s + τ )x(s)ds −
t−τ
=
0
b(s + τ )x(s)ds + ln x(t) − ln x(0)
−τ
Z th
Z 0
σ 2 (t)
x(s + θ)dµ(θ)
r(s) − 1
− (a(s) − b(s + τ ))x(s) + c(s)
2
0
−∞
Z t
Z t
σ22 (t)x2 (s) i
ds +
σ1 (s)dω1 (s) +
σ2 (s)x(s)dω2 (s).
−
2
0
0
(3.1)
EJDE-2013/262
PERSISTENCE AND EXTINCTION
7
By hypothesis (A3), we obtain
Z t
Z 0
c(s)
x(s + θ)dµ(θ)ds
−∞
0
t
Z
=
t
=
c(s)ds
e
r(s+θ)
x(s + θ)e
−r(s+θ)
Z
Z
Z
≤ c kξkcg
t
e−rs ds
−rs
Z
0
e−rθ dµ(θ) + cu
−∞
Z 0
t
e
e
ds
−2rθ
Z
u
Consequently,
Z t
Z
b(s + τ )x(s)ds −
Z
t
Z
−∞
Z 0
c(s)x(s + θ)ds
−θ
x(s)ds
dµ(θ)
0
Z
t
x(s)ds
dµ(θ)
−∞
1 u
c kξkCg µr (1 − e−rt ) + cu
r
t
dµ(θ)
0
dµ(θ) + c
−∞
0
0
t
x(s)ds.
0
0
b(s + τ )x(s)ds + ln x(t) − ln x(0)
−τ
t−τ
Z th
0
Z
−t
0
u
0
dµ(θ) +
−∞
≤ cu kξkcg
≤
i
x(s + θ)dµ(θ) ds
−s
Z
0
≤
0
Z
x(s + θ)dµ(θ)ds +
−∞
−s
0
Z
−s
hZ
c(s)
r(s) −
σ 2 (s)x2 (s) i
σ12 (s) − a(s) − b(s + τ ) − cu x(s) − 2
ds
2
2
(3.2)
1
+ cu kξkCg µr (1 − e−rt ) + M1 (t) + M2 (t),
r
where
Z
M1 (t) =
t
Z
σ1 (s)dω1 (s),
M2 (t) =
0
t
σ2 (s)x(s)dω2 (s).
0
The quadratic variation of M1 (t) is
Z
hM1 (t), M1 (t)i =
t
σ12 (t)(s)ds ≤ (σ1u )2 t.
0
Using the strong law of large numbers for martingales (see e.g. [29, page 16]) leads
to
M1 (t)
lim
= 0, a.s.
(3.3)
t→+∞
t
Rt 2
The quadratic variation of M2 (t) is hM2 (t), M2 (t)i = 0 σ2 (s)x2 (s)ds. By the
exponential martingale inequality, for any positive constants T0 , α and β, we have
n
h
i
o
α
P
sup M2 (t) − hM2 (t), M2 (t)i > β ≤ e−αβ .
(3.4)
2
0≤t≤T0
Choose T0 = k, α = 1, β = 2 ln k. Then it follows that
n
h
i
o
1
1
P sup M2 (t) − hM2 (t), M2 (t)i > 2 ln k ≤ 2 .
2
k
0≤t≤k
Using Borel-Cantelli’s lemma yields that for almost all ω ∈ Ω, there is a random
integer k0 = k0 (ω) such that for k ≥ k0 ,
i
h
1
sup M2 (t) − hM2 (t), M2 (t)i ≤ 2 ln k.
2
0≤t≤k
8
C. LU, X. DING
EJDE-2013/262
This is to say
1
1
M2 (t) ≤ 2 ln k + hM2 (t), M2 (t)i = 2 ln k +
2
2
Z
t
σ22 (s)x2 (s)ds
0
for all 0 ≤ t ≤ k, k ≥ k0 a.s. Substituting this inequality into (3.1), we obtain
Z th
Z 0
i
σ 2 (s)
r(s) − 1
b(s)x(s)ds +
ln x(t) − ln x(0) ≤
− (a(s) − b(s) − cu )x(s) ds
2
0
−τ
1 u
+ 2 ln k + c kξkCg µr (1 − e−rt ) + M1 (t)
r
(3.5)
for all 0 ≤ t ≤ k, k ≥ k0 a.s. In other words, we have shown that for 0 < k − 1 ≤
t ≤ k, k ≥ k0 ,
t−1 {ln x(t) − ln x(0)}
Z 0
Z th
i
σ 2 (s)
− ((a(s) − b(s) − cu )x(s) ds
≤ t−1
b(s)x(s)ds + t−1
r− 1
2
−τ
0
1
+ 2(k − 1)−1 ln k + t−1 cu kξkCg µr (1 − e−rt ) + M1 (t)/t.
r
Taking the limit superior on both sides and using (3.3) yields lim supt→+∞
¯ That is to say, if d¯ < 0, one sees that limt→+∞ x(t) = 0 a.s.
d.
ln x(t)
t
≤
Theorem 3.2. Let (A1) and (A2) hold, if d¯ = 0 and inf t∈R+ {a(t)−b(t+τ )−cu } ≥
0, then the population x(t) represented by (1.2) is nonpersistent in the mean a.s.
Proof. From d¯ = 0 and (3.3), then for all ε > 0, there exists T , such that
Z t
Z 0
σ1 (s)
t−1
)ds + t−1
(r(s) −
b(s)x(s)ds
2
0
−τ
2 ln k M1 (t)
1
+
< ε ∀t > T.
+ t−1 cu kξkCg µr (1 − e−rt ) +
r
t
t
In view of (3.5), we have
ln x(t) − ln x(0)
Z 0
Z th
i
σ 2 (s)
≤
− (a(s) − b(s + τ ) − cu )x(s) ds
b(s)x(s)ds +
r(s) − 1
2
−τ
0
1
+ t−1 cu kξkCg µr (1 − e−rt ) + 2 ln k + M1 (t)
r
Z t
< εt −
(a(s) − b(s + τ ) − cu )x(s)ds
0
for all T ≤ k −1 ≤ t ≤ k, k ≥ k0 a.s. Define h(t) =
b(s + τ ) − cu ], then we have
Rt
0
x(s)ds and N = inf s∈R [a(s)−
ln(dh/dt) < εt − N h(t) + ln x(0),
t > T.
The rest of proof is similar to [14, Theorem 3] and is hence omitted.
Theorem 3.3. Let (A1) and (A2) hold. If d¯ > 0, then the population x(t) modeled
by (1.2) is weakly persistent a.s.
EJDE-2013/262
PERSISTENCE AND EXTINCTION
9
Proof. Now suppose that d¯ > 0, we will prove lim supt→+∞ x(t) > 0 a.s. If this
assertion is not true, let F = {lim supt→+∞ x(t) = 0} and suppose P (F ) > 0. In
view of (3.1),
Z 0
Z t
bx(s)ds + t−1 ln x(t)
bx(s)ds − t−1
t−1
t−τ
−τ
Z th
σ12 (s)
− (a(s) − b(s))x(s)
2
0
Z 0
σ 2 (s)x2 (s) i
ds + M1 (t)/t + M2 (t)/t.
+ c(s)
x(s + θ)dµ(θ) − 2
2
−∞
= t−1 ln x(0) + t−1
r(s) −
(3.6)
On the other hand, for all ω ∈ F , we have limt→+∞ x(t, ω) = 0, then the law of large
numbers for local martingales indicates that limt→+∞ M2 (t)/t = 0. Substituting
this equality and (3.3) into (3.6) results in the contradiction
0 ≥ lim sup[t−1 ln x(t, ω)] = d¯ > 0.
t→+∞
It is well known that in the study of population system, stochastic permanence,
which means that the population will survive forever, is one of the most important
and interesting topics due to its theoretical and practical significance. So we show
that x(t) modeled by (1.2) is stochastic permanent in some cases.
σ 2 (t) Theorem 3.4. Let (A1) and (A2) hold. If r(t) − 12 ∗ > 0, b(t) ≥ 0, and
c(t) ≥ 0, then the population x(t) modeled by (1.2) will be stochastic permanent.
Proof. First, we prove that for arbitrary ε > 0, there are constants M > 0 such
that lim inf t→+∞ P{x(t) ≤ M } ≥ 1 − ε.
Let 0 < p < 1 and ε1 ∈ (0, 2r), we compute
dxp (t)
1
= pxp−1 (t)dx(t) + p(p − 1)xp−2 (t)(dx(t))2
2
Z
h
= pxp−1 (t) x(t) r(t) − a(t)x(t) + b(t)x(t − τ ) + c(t)
0
x(t + θ)dµ(θ) dt
−∞
i 1
+ σ1 (t)x(t)dω1 (t) + σ2 (t)x2 dω2 (t) + p(p − 1)σ12 (t)xp (t)dt
2
1
2
p+2
+ p(p − 1)σ2 (t)x (t)dt
2
h
p2 b2 (t)x2p (t)
p2 c2 (t)x2p (t)
≤ r(t)pxp (t) +
+ x2 (t − τ ) +
4
4
Z 0
i
+
x2 (t + θ)dµ(θ) dt + pσ1 (t)xp (t)dω1 (t) + pσ2 (t)xp+1 (t)dω2 (t)
−∞
1
1
− p(1 − p)σ12 (t)xp (t)dt − p(1 − p)σ22 (t)xp+2 (t)dt
2
2
Z 0
h
i
= F (x)dt − ε1 xp (t) + eε1 τ x2 (t) − x2 (t − τ ) −
x2 (t + θ)dµ(θ) + µr x2 (t) dt
−∞
+ pσ1 (t)xp (t)dω1 (t) + pσ2 (t)xp+1 (t)dω2 (t)
10
C. LU, X. DING
EJDE-2013/262
where
p2 b2 (t)x2p (t)
4
p2 c2 (t)x2p (t) 1
1
+
− p(1 − p)σ12 (t)(t)xp (t) − p(1 − p)σ22 (t)x2+p (t).
4
2
2
From (A1)–(A2) and 0 < p < 1, we have that F (x) is bounded in R+ , namely
F (x) = eε1 τ x2 (t) + µr x2 (t) + (ε1 + r(t)p)xp (t) +
sup F (x) = M3 < +∞.
x∈R+
Therefore,
dxp (t) = [M3 − ε1 xp (t) − eε1 τ x2 (t) + x2 (t − τ )]dt
Z 0
+
x2 (t + θ)dµ(θ)dt − µr x2 (t)dt
−∞
+ pσ1 (t)xp (t)dω1 (t) + pσ2 (t)xp+1 (t)dω2 (t).
Once again by Itǒ’s formula we have
d[eε1 t xp (t)] = eε1 t [ε1 xp (t)dt + dxp (t)]
Z 0
h
i
≤ eε1 t M3 − eε1 τ x2 (t) + x2 (t − τ ) +
x2 (t + θ)dµ(θ) − µr x2 (t) dt
−∞
ε1 t
p
p+1
+e
pσ1 (t)x (t)dω1 (t) + pσ2 (t)x (t)dω2 (t) .
Hence, we have
eε1 t Exp (t)
Z t
Z t
e ε1 t M 3
M3
−
−E
eε1 s+ε1 τ x2 (s)ds + E
eε1 s x2 (s − τ )ds
ε1
ε1
0
0
Z t
Z 0
Z t
ε1 s
2
ε1 s 2
+E
e
x (s + θ)dµ(θ)ds − E
µr e x (s)ds
≤ ξ p (0) +
−∞
0
0
Z t
Z t−τ
M3
eε1 t M3
ε1 s+ε1 τ 2
p
−
−E
e
x (s)ds + E
eε1 s+ε1 τ x2 (s)ds
≤ ξ (0) +
ε1
ε1
0
−τ
Z t
Z 0
Z t
+E
e ε1 s
x2 (s + θ)dµ(θ)ds − E
µr eε1 s x2 (s)ds
−∞
ε1 t
e M3
0
≤ ξ p (0) +
ε1
Z
t
Z
0
−
0
eε1 s+ε1 τ x2 (s)ds
−τ
0
e ε1 s
+E
M3
+
ε1
Z
x2 (s + θ)dµ(θ)ds − Eµr
−∞
0
Z
t
eε1 s x2 (s)ds
0
From (A2), we have
Z t
Z 0
ε1 s
e
x2 (s + θ)dµ(θ)ds
−∞
0
Z
t
e ε1 s
=
hZ
=
0
x2 (s + θ)dµ(θ) +
−∞
−s
0
Z
−s
t
eε1 s ds
Z
−∞
Z
0
i
x2 (s + θ)dµ(θ) ds
−s
e2r(s+θ) x2 (s + θ)e−2r(s+θ) dµ(θ) +
Z
0
Z
t
dµ(θ)
−t
−θ
eε1 (s) x2 (s + θ)ds
EJDE-2013/262
t
Z
eε1 s ds
=
PERSISTENCE AND EXTINCTION
Z
−s
e2r(s+θ) x2 (s + θ)e−2r(s+θ) dµ(θ) +
Z
≤ kξk2Cg
Z
−t
t
e(ε1 −2r)s ds
Z
0
e−2rθ dµ(θ) +
Z
−∞
0
≤ kξk2Cg µr t + µr
Z
Z
t+θ
dµ(θ)
−∞
0
0
11
0
e−ε1 θ dµ(θ)
eε1 (s−θ) x2 (s)ds
0
Z
−∞
t
eε1 s x2 (s)ds
0
t
eε1 s x(s)ds.
0
This implies
lim sup E[xp (t)] ≤
t→+∞
Now, for any ε > 0 and M =
M3 1/p 1/p
/ε ,
ε1
M3
.
ε1
by Chebyshev’s inequality,
p
P{x(t) > M } = P{x (t) > M p } ≤ E[xp (t)]/M p .
Hence
lim sup P{x(t) > M } ≤ ε.
t→+∞
This implies
lim inf P{x(t) ≤ M } ≥ 1 − ε.
t→+∞
Next, we claim that for arbitrary ε > 0, there is a constant β > 0 such that
lim inf t→+∞ P{x(t) ≥ β} ≥ 1 − ε. Define V1 (x) = 1/x2 for x ∈ R+ . Applying Itô’s
formula to(1.2) we obtain
dV1 (x(t)) = −2x−3 dx + 3x−4 (dx)2
= 2V1 (x)[1.5σ22 (t)x2 + a(t)x − r(t) + 1.5σ12 (t) − b(t)x(t − τ )
Z 0
− c(t)
x(t + θ)dµ(θ)]dt − 2σ1 (t)x−2 dω1 (t) − 2σ2 (t)x−1 dω2 (t).
−∞
σ 2 (t)
Since (r(t) − 12 )∗ > 0, we can choose a sufficient
σ 2 (t) that r(t) − 12 ∗ − κ(σ1u )2 > 0.
Define V2 (x) = (1 + V1 (x))κ . Using Itô’s formula
κ−1
dV2 = κ(1 + V1 (x(t)))
small constant 0 < κ < 1 such
again leads to
dV1 + 0.5κ(κ − 1)(1 + V1 (x(t)))κ−2 (dV1 )2
= κ(1 + V1 (x))κ−2 {(1 + V1 (x))2V1 (x)[1.5σ22 (t)x2 + a(t)x − r(t) + 1.5σ12 (t)
Z 0
− b(t)x(t − τ ) − c(t)
x(t + θ)dµ(θ)] + 2σ12 (t)(κ − 1)V12 (x)
−∞
+
2σ22 (t)(κ
− 1)V1 (x)}dt − 2κ(1 + V1 (x))κ−1 x−2 σ1 (t)dω1 (t)
− 2κ(1 + V1 (x))κ−1 x−1 σ2 (t)dω2 (t)
≤ κ(1 + V1 (x))κ−2 {(−2r(t) + 3σ12 (t) + 2σ12 (t)(κ − 1))V12 (x) + 2a(t)V11.5 (x)
+ [3σ12 (t) − 2r(t) + (2κ + 1)σ22 (t)]V1 (x) + 2a(t)V10.5 (x) + 3σ22 (t)}dt
− 2κ(1 + V1 (x))κ−1 x−2 σ1 (t)dω1 (t) − 2κ(1 + V1 (x))κ−1 x−1 σ2 (t)dω2 (t)
= κ(1 + V1 (x))κ−2 {(−2r(t) + σ12 (t) + 2κσ12 (t))V12 (x) + 2a(t)V11.5 (x) + [3σ12 (t)
− 2r + (2κ + 1)σ22 (t)]V1 (x) + 2a(t)V10.5 (x) + 3σ22 (t)}dt
− 2κ(1 + V1 (x))κ−1 x−2 σ1 (t)dω1 (t) − 2κ(1 + V1 (x))κ−1 x−1 σ2 (t)dω2 (t)
12
C. LU, X. DING
EJDE-2013/262
n
σ 2 (t) ≤ κ(1 + V1 (x))κ−2 − 2 r(t) − 1
− κ(σ1u )2 V12 (x) + 2au V11.5 (x)
2
∗
o
+ [3(σ1u )2 − 2rl + (2κ + 1)(σ2u )2 ]V1 (x) + 2au V10.5 (x) + 3(σ2u )2 dt
− 2κ(1 + V1 (x))κ−1 x−2 σ1 (t)dω1 (t) − 2κ(1 + V1 (x))κ−1 x−1 σ2 (t)dω2 (t)
for sufficiently large t ≥ T . Now, let η > 0 be sufficiently small satisfying
σ 2 (t)
η
< (r(t) − 1 )∗ − κ(σ1u )2 .
2κ
2
ηt
Define V3 (x) = e V2 (x). By Itǒ’s formula
0<
dV3 (x(t))
= ηeηt V2 (x) + eηt dV2 (x)
n
σ 2 (t)
≤ κeηt (1 + V1 (x(t)))κ−2 η(1 + V1 (x))2 /κ − 2 (r(t) − 1 )∗ − κ(σ1u )2 V12 (x)
2
o
+ 2au V11.5 (x) + (3(σ1u )2 − 2r∗ + (2κ + 1)(σ1u )2 )V1 (x) + 2au V10.5 (x) + 3(σ2u )2 dt
− 2κeηt (1 + V1 (x))θ−1 x−2 σ1 (t)dω1 (t) − 2κeηt (1 + V1 (x))κ−1 x−1 σ2 (t)dω2 (t)
n
η 2
σ 2 (t) − κ(σ1u )2 −
V (x) + 2au V11.5 (x)
≤ κeηt (1 + V1 (x(t))κ−2 − 2 r(t) − 1
2
2κ 1
∗
o
+ [3(σ1u )2 − 2rl + (2κ + 1)(σ2u )2 + 2η/κ]V1 (x) + 2au V10.5 (x) + 3(σ2u )2 + η/κ dt
− 2θeηt (1 + V1 (x))κ−1 x−2 σ1 (t)dω1 (t) − 2κeηt (1 + V1 (x))κ−1 x−1 σ2 (t)dω2 (t)
= eηt H(x)dt − 2κeηt (1 + V1 (x))κ−1 x−2 σ1 (t)dω1 (t)
− 2κeηt (1 + V1 (x))κ−1 x−1 σ2 (t)dω2 (t)
for t ≥ T . Note that H(x) is bounded from above in R+ , namely supx∈R+ H(x) =
H < +∞. Consequently,
dV3 (x(t)) = Heηt dt − 2κeηt (1 + V1 (x(t)))κ−1 x−2 (t)σ1 (t)dω1 (t)
− 2κeηt (1 + V1 (x))κ−1 x−1 σ2 (t)dω2 (t)
for sufficiently large t. Integrating both sides of the above inequality and then
taking expectations gives
H ηt
E[V3 (x(t))] = E[eηt (1 + V1 (x(t)))κ ] ≤ eηT (1 + V1 (x(T )))κ +
e − eηT .
η
That is to say
lim sup E[V1κ (x(t))] ≤ lim sup E[(1 + V1 (x(t)))κ ] <
t→+∞
t→+∞
In other words, we have shown that
lim sup E
t→+∞
1
x2κ (t)
1/2κ
So for any ε > 0, set β = ε1/2κ /M4
that
n
P{x(t) < β} = P
≤
H
.
η
H
= M4 .
η
, by Chebyshev’s inequality, one can derive
1
1
1 o E[ x2κ (t) ]
>
≤
.
1
x2κ (t)
β 2κ
β 2κ
EJDE-2013/262
PERSISTENCE AND EXTINCTION
13
This is to say
lim sup P{x(t) < β} ≤ β 2κ M4 = ε.
t→+∞
Consequently
lim inf P{x(t) ≥ β} ≥ 1 − ε.
t→+∞
This completes the whole proof.
Remark 3.5. Theorems 3.1–3.3 have an obvious and interesting biological interpretation. Under assumption (A1) and (A2), if d¯ > 0, the population x(t) will be
weakly persistent. Under assumption (A1) and (A2), if d¯ < 0 and inf t∈R+ {a(t) −
b(t + τ ) − cu } ≥ 0, the population x(t) will go extinct. That is to say, if assumption
(A1) and (A2) hold and inf t∈R+ {a(t) − b(t + τ ) − cu } ≥ 0, then d¯ is the threshold
between weak persistence and extinction for the population x(t).
Rt
σ 2 (s) Remark 3.6. With d¯ = lim supt→+∞ t−1 0 r(s)− 12 ds in Theorem 3.1–3.3, we
note that the stochastic noise on r(t) is detrimental to the survival of the population
but the stochastic noise on a(t) has little effect on the persistence or extinction of
the population. Thus, in true ecological modeling, the stochastic noise on r(t)
should be considered, but the stochastic noise on a(t) could be overlooked in some
cases.
Remark 3.7. From Theorem 3.1–3.3, we found that the delay has no effect on the
persistence and extinction of the stochastic model in autonomous case.
Remark 3.8. If b(t) ≤ 0 and c(t) ≤ 0 hold, then the condition inf t∈R+ {a(t) − b(t +
τ ) − cu } ≥ 0 in Theorem 3.1–3.2 can be omitted.
Remark 3.9. Liu and Wang [14] studied the persistence and extinction of two
stochastic logistic model. Our work extends their results to stochastic population
with infinite delay.
4. Examples and numerical simulations
In this section, we explore the behavior of the model (1.2) using numerical solutions . For convenience, we let the probability measure µ(θ) be eθ on (−∞, 0]. So
the model (1.2) will be written as
Z 0
h
dx(t) = x(t) r(t) − a(t)x(t) + b(t)x(t − τ ) + c(t)e−t
es ξ(s)ds
−∞
(4.1)
Z t
i
+ c(t)e−t
es x(s)ds dt + σ1 (t)x(t)dw1 (t) + σ2 (t)x2 (t)dw2 (t).
0
By employing the Euler scheme to discretize this equation, where the integral term
is approximated by using the composite K -rule as a quadrature [30] and taking
the initial values as ξ(s) = e−0.5s , τ = 0.8. We obtain the discrete approximate
solution
Z 0
h
xk+1 = xk + xk r(k∆t) − a(k∆t)xk + b(k∆t)xk−800 + c(k∆t)e−k∆t
e0.5θ dθ
−∞
+ c(k∆t)e−k∆t
k
X
j=0
(k)
i
ωj ej∆t xj ∆t + xk (∆B1 )k + x2k (∆B2 )k ,
14
C. LU, X. DING
EJDE-2013/262
where (∆Bi )k = Bi ((k + 1)∆t) − Bi (k∆t), k = 0, 1, 2, . . . , i = 1, 2. The general
composite K -rule has weights
(k)
(k)
(k)
{ω0 , ω1 , . . . , ωk } = {K , 1, . . . , 1 − K },
K ∈ [0, 1]
(k)
j=0 ωj
Pk
and
= k, k ≥ 0.
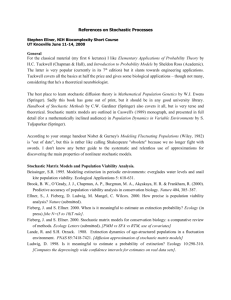
Here, we choose r(t) = 0.2 + 0.02 sin t, a(t) = 0.09, b(t) = 0.01, c(t) = 0.005,
σ2 (t) = 0.08, K = 0 and step size ∆t = 0.001. The only difference between
conditions of Figure .1(a), Figure 1(b), Figure 1(c) and Figure 1(d) is that the
representations of σ1 (t) are different. In Figure 1(a), we choose σ12 (t) ≡ 0.5, then
d¯ = −0.05. In view of Theorem 3.1, population x(t) will go to extinction. In
Figure 1(b), we consider σ12 (t) = 0.4 + 0.01 sin t, then d¯ = 0. By Theorem 3.2,
population x(t) will be nonpersistent in the mean. In Figure 1(c), we choose σ12 (t) ≡
0.38, then d¯ = 0.01 > 0. From Theorem 3.3, the population x(t) will be weakly
σ 2 (t)
persistent. In Figure 1(d), we consider σ12 (t) ≡ 0.32, then (r(t)− 12 )∗ = 0.02 > 0.
Using Theorem 3.4, the population x(t) will be stochastic permanence. By using
numerical simulations, we find that the stochastic noise on r(t) can change the
properties of the population models significantly.
(a)
(b)
2
x(t)
1.5
Population sizes
Population sizes
2
1
0.5
0
−2
0
2
4
6
<x(t)>
1.5
1
0.5
0
−2
8
0
2
Time
(c)
6
8
(d)
2
6
x(t)
1.5
Population sizes
Population sizes
4
Time
1
0.5
0
−2
0
2
4
Time
6
8
x(t)
4
2
0
−2
0
2
4
6
8
Time
Figure 1. The horizontal axis is time and the vertical axis is the
population size x(t) (step size ∆t = 0.001)
Conclusions and future directions. In the real world, the natural growth of
population is inevitably affected by stochastic disturbances. In this paper, a stochastic logistic model with infinite delay is proposed and analyzed. With space Cg
as phase space, sufficient conditions for extinction are established and nonpersistent
in the mean, weak persistence and stochastic permanence. Furthermore, we obtain
the threshold between weak persistence and extinction.
Some interesting topics merit further consideration. It is interesting to study
what happens if c(t) is stochastic. Another significant problem is devoted to multidimensional stochastic model with infinite delay, and these investigations are in
progress.
EJDE-2013/262
PERSISTENCE AND EXTINCTION
15
References
[1] Golpalsamy, K.; Global asymptotic stability in Volterras population systems. J. Math. Biol.
1984; 19:157-168.
[2] Golpalsamy, K.; Stability and Oscillations in Delay Differential Equations of Population
Dynamics. Kluwer Academic: Dordrecht, 1992.
[3] Kuang, Y.; Smith, H. L.; Global stability for infinite delay Lotka-Valterra type systems. J.
Diff. Eq. 1993;103:221-246.
[4] Freedman, H. I.; Wu, J.; Periodic solutions of single-species models with periodic delay. SIAM
J. Math. Anal. 1992; 23: 689-701.
[5] Kuang, Y.; Delay Differential Equations with Applications in Population Dynamics. Academic Press, Boston, 1993.
[6] Lisena, B.; Global attractivity in nonautonomous logistic equations with delay. Nonlinear
Anal. RWA. 2008; 9: 53-63.
[7] Gard, T. C.; Persistence in stochastic food web models. Bull. Math. Biol. 1984; 46: 357-370.
[8] Gard, T. C.; Stability for multispecies population models in random environments. Nonlinear
Anal. 1986; 10: 1411-1419.
[9] Gard, T. C.; Introduction to Stochastic Differential Equations. Dekker: New York, 1988.
[10] May, R. M.; Stability and Complexity in Model Ecosystems. Princeton University Press: NJ,
2001.
[11] Mao, X. R.; Marion, G.; Renshaw, E.; Environmental Brownian noise suppresses explosions
in populations dynamics. Stochastic Process. Appl. 2002; 97: 95-110.
[12] Li, W. X.; Su, H.; Wang, K.; Global stability analysis for stochastic coupled systems on
networks. Automatica 2011; 47: 215-220.
[13] Meng, Q.; Jiang, H. R.; Robust stochastic stability analysis of Markovian switching genetic
regulatory networks with discrete and distributed delays. Neurocomputing 2010; 74: 362-368.
[14] Liu, M; Wang, K.; Persistence and extinction in stochastic non-autonomous logistic systems.
J. Math. Anal. Appl. 2011; 375: 443-457.
[15] Liu, M; Wang, K; Wu, Q.; Survival analysis of stochastic competitive models in a polluted
environment and stochastic competitive exclusion principle. Bull. Math. Biol. 2011; 73: 19692012.
[16] Haddock, J. R.; Hornor, W. E.; Precompactness and convergence on norm of positive orbits
in a certain fading memory space. Funkcial. Ekvac. 1988; 31: 349-361.
[17] Hale, J. K.; Kato, J.; Phase space for retarded equations with infinite delay. Funkcial. Ekvac.
1978; 21: 11-41.
[18] Liu, M; Wang; Global asymptotic stability of a stochastic Lotka-Volterra model with infinite
delays. Commun. Nonlinear. Sci. Numer. Simul. 2012; 17: 3115-3123.
[19] Sawano K; Some considerations on the fundamental theorems for functional differential equations with infinite delay. Funkcial. Edvac. 1982; 22: 615-619.
[20] Wang, W.; Ma, Z.; Permanence of a nonautomonous population model. Acta Math. Appl.
Sin. Engl. Ser. 1998; 1: 86-95.
[21] Hallam, T.; Ma, Z.; Persistence in population models with demographic fluctuations. J. Math.
Biol. 1986; 24: 327-339.
[22] Ma, Z.; Hallam, T.; Effects of parameter fluctuations on community survival. Math Biosci.
1987; 86: 35-49.
[23] Jiang, D. Q.; Shi, N. Z.; Li, X. Y.; Global stability and stochastic permanence of a nonautonomous logistic equation with random perturbation. J. Math. Anal. Appl. 2008; 340:
588-597.
[24] Wei, F. Y.; The basic theory of stochastic functional differential equations with infinite delay.
China Doctor Dissertation Full-text Database, 2006.
[25] Wei, F. Y.; Cai, Y. H.; Existence, uniqueness and stability of the solution to neutral stochastic
functional differential equations with infinite delay under non-Lipschitz conditions. Adv.
Differ. Equ. 2013; 2013: 151.
[26] Wei, F. Y.; Wang, K.; The existence and uniqueness of the solution for stochastic functional
differential equations with infinite delay. J. Math. Anal. Appl. 2007; 331: 516-531.
[27] Xu, Y.; The existence and uniqueness of the solution for stochastic functional differential
equations with infinite delay at the phase space B. J. Math. Appl. 2007; 20: 827-830.
16
C. LU, X. DING
EJDE-2013/262
[28] Xu, Y.; Wu, F. K.; Tan, Y. M.; Stochastic Lotka-Volterra system with infinite delay. J.
Comput. Appl. Math. 2009; 232: 472-480.
[29] Mao, X. R.; Stochastic Differential Equations and Applications. Horwood Publishing: Chichester, 1997.
[30] Song, Y.; Baker, C. T. H.; Qualitative behaviour of numerical approximations to Volterra
integro-differential equations. J. Comput. Appl. Math. 2004; 172: 101-115.
Chun Lu
Department of Mathematics, Harbin Institute of Technology, Weihai 264209, China
E-mail address: mathlc@163.com
Xiaohua Ding
Department of Mathematics, Harbin Institute of Technology, Weihai 264209, China
E-mail address: mathlc@126.com