Proceedings of the ASME 2009 Summer Bioengineering Conference (SBC2009)
advertisement
")
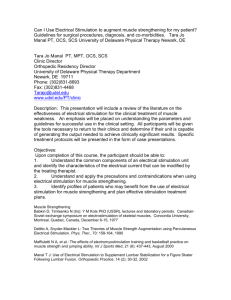
Proceedings of the ASME 2009 Summer Bioengineering Conference (SBC2009) June 17-21, Resort at Squaw Creek, Lake Tahoe, CA, USA SBC2009-206785 Muscle Stimulation Waveform Timing Patterns to Increase Muscular Endurance in Functional Electrical Stimulation Pedaling Using a Forward Dynamic Model Nils A. Hakansson 2 Maury L. Hull 1 Mechanical Engineering Department University of Delaware Newark, DE 2 INTRODUCTION Functional electrical stimulation (FES) pedaling can provide spinal cord injured (SCI) individuals with cardiorespiratory and muscular strength benefits. A limiting factor in FES pedaling benefit to the SCI population is the low endurance of electrically stimulated muscle. Because a reduction of the force-time integral for a single muscle group leads to an increase in the duration of the force generating capacity of the muscle group [1-2], we sought to test whether reducing the stress-time integral of multiple muscle groups working together could increase the endurance and work performed during FES pedaling. To this end, the objectives of this study were to: 1) compute the electrical stimulation timing patterns that minimize the stress-time integral of the muscles used to pedal a FES ergometer, 2) compare the simulated mechanical energies generated by the muscles with the computed electrical stimulation on and off times, and 3) test the efficacy of the computed electrical stimulation timing patterns in an experimental setting. METHODS A forward dynamic model of planar recumbent FES pedaling comprised of two legs, two pedals, and a crank was generated using SIMM and Dynamics Pipeline (MusculoGraphics, Inc., Santa Rosa, CA, USA) from the equations of motion for a rider-ergometer system derived using SD/FAST (Parametric Technology Corp., Needham, MA, USA) [3]. Each leg was modeled as three segments (thigh, shank, and foot). The foot was rigidly attached to the pedal and the two pedals were connected to a crank that rotated about an axis fixed in the inertial frame. The crank dynamical properties were representative of the ERGYS2 (Therapeutic Alliances, Inc., Dayton, OH, USA) FES ergometer. The muscle origin and insertion points, moment arm lengths and muscle-tendon paths were based on the work of Delp et al. [4]. Nine 1 Mechanical Engineering Department University of California Davis, CA generic Hill-type muscles were distributed into 3 muscle sets based on their function and co-contraction with surface electrical stimulation. The muscle groups were QUADS (3-component vastus and rectus femoris), GMAX (gluteus maximus), and HAMS (semimembranosus, semitendinosus, biceps femoris long head and short head). All of the muscles in a set received the same excitation signal - an isosceles trapezoidal sloped pattern that defined the on and off timing and amplitude of the muscle excitation [5]. The forward dynamic model was used to compute the electrical stimulation amplitudes and on and off times that minimized the sum of the area under the active component (i.e. no passive forces) of the muscle stress-time curve for each muscle and the difference between the areas under the active component of the muscle stress-time curves of all stimulated muscles (with the exception of the soleus muscle) over a crank cycle. A simulated annealing optimization algorithm [6] identified muscle excitation parameters that both minimized the above performance criterion cost, J, and satisfied a time constraint requiring an average pedaling rate within 1 rpm of the target 50 rpm pedaling rate. The resulting net mechanical energy of each of the activated muscles was calculated by integrating the instantaneous muscle mechanical power over the crank cycle. Experimental data were collected from 8 subjects (mean age 28 ± 9 years, mean height 1.71 ± 0.10 m, mean weight 65 ± 15 kg) with a complete spinal cord injury between level T4 to T12 to assess their work output using the existing (StimErg) and computed (Stim3) electrical stimulation timing patterns. Subjects pedaled the ERGYS2 three times per week with a target of 30 minutes total per session during the first 3 weeks to acclimate to FES pedaling and once per week during the last 4 weeks for the experimental data collection. The experimental data collection sessions were divided into two 2-week time blocks. The order of the electrical stimulation timing patterns, 1 Copyright © 2009 by ASME subjects using Stim3 compared to StimErg provide support for the use of forward dynamic simulations to compute muscle excitation timing patterns that fulfill complicated gross motor tasks. StimErg and Stim3, was randomly assigned during the first 2-week time block and was then reversed during the second 2-week time block [3]. A two-factor repeated measures one-tailed ANOVA analysis was used to test the hypothesis that Stim3 would enable an individual with SCI to generate more mechanical work on the ERGYS2 than StimErg [7]. The two factors were the electrical stimulation timing patterns at two levels (Stim3 and StimErg) and the 2-week time block that the electrical stimulation factor was tested (first half and second half). The dependent variable was the log transformation of the total work generated prior to cessation of the test (i.e. slowing to a 35 rpm cut-off pedaling rate). RESULTS Based on the simulation outputs, Stim3 on and off timing shifted earlier in the crank cycle for the HAMS and GMAX and later in the crank cycle for the QUADS compared to StimErg (Figure 1). ,There was a 20 percent increase and a 4 percent and a 2 percent decrease in the net mechanical energy generated by the HAMS, QUADS and GMAX, respectively, with Stim3 (Table 1). The performance criterion cost, J, associated with Stim3 (0.29 Pa-s) was 17 percent lower than that of StimErg (0.35 Pa-s). Experimentally, Stim3 resulted in 11 percent (p = 0.043) more mechanical work performed compared to StimErg. The average mechanical work accomplished by the 8 subjects with Stim3 was 18.3 ± 17.6 kJ and with StimErg was 16.9 ± 16.7 kJ (Figure 2). There was no significant interaction between the electrical stimulation timing patterns and the time blocks (p = 0.369). DISCUSSION The differences in the electrical stimulation on and off times and amplitudes between Stim3 and StimErg gave rise to the different mechanical energies generated by the muscle groups. Based on the relationship between HAMS origins and insertions and the hip and knee trajectories in fixed-ankle pedaling, HAMS was capable of generating mechanical energy as soon as the knee transitioned from extension to flexion (at a crank angle of approximately 120 degrees). The earlier onset of the HAMS excitation associated with Stim3 corresponded with the knee transition from extension to flexion and resulted in the HAMS capacity to generate more mechanical energy to contribute to pedaling compared to StimErg (Figure 1). The magnitude of variation between the mechanical energies generated by the QUADS and GMAX using Stim3 and StimErg were not as meaningful as that for HAMS. The increase in mechanical energy generated by the HAMS compensated for the decreased mechanical energy generated by the QUADS and GMAX (Table 1). Six of the eight subjects performed more mechanical work with Stim3 than StimErg. The benefit was notable in that the percent difference in the work between Stim3 and StimErg increased by a range of 6 to 30 percent (mean 17 percent). For the 2 subjects who performed less work with Stim3, the percent differences were 6 and 10 percent. While Stim3 did not benefit all of the subjects, for the 75 percent of the subjects who did benefit, the average mechanical work performed more than doubled the reduction in work by the remaining 25 percent of the subjects. The results of this study provide new information on the use of forward dynamic modeling combined with nonlinear optimization as a means to determine muscle excitation timing to increase the duration of FES pedaling and lead to improved FES pedaling outcomes. Minimization of the factors that contribute to a decrease in the endurance of muscles performing were shown to prolong the duration of the FES pedaling and thereby provide increased muscle mechanical energy and, consequently, the potential for increased muscle training. The increase in mechanical energy generated by the experimental Table 1. The net mechanical energy generated by the muscle sets from the simulation driven by the electrical stimulation muscle excitation on and off times (by crank angle) for StimErg and Stim3. Muscle Set StimErg (J) Stim3 (J) HAMS 3.13 3.74 QUADS 10.91 10.44 GMAX 2.73 2.66 Figure 1. Muscle electrical stimulation on and off timing as a function of crank angle for StimErg (a) and Stim3 (b). Top-deadcenter indicates 0 degrees and the beginning of the crank cycle. The on and off timing angles are listed at the beginning and end of the stimulation for each muscle set. 100.0 StimErg Work (kJ) Stim3 10.0 1.0 1 2 3 4 5 6 7 8 Subject Figure 2. Mechanical work generated by the 8 subjects with StimErg and Stim3. Each bar is the average of the two time blocks. The error bars denote 1 standard deviation. ACKNOWLEDGEMENT This work was supported by the National Institute on Disability and Rehabilitation Research (NIDRR) (Award Number H133G0200137). REFERENCES 1. Dolmage, T. et al. 1991, Can J Physiol Pharmcol, 69, 1410-1415. 2. Tran, Q.T., et al. 2006, Eur JAppl Pysiol, 98, 402-410. 3. Hakansson, N.A. 2008, PhD Dissertation. 4. Delp, S.L., et al. 1990, IEEE Trans Biomed Eng, 37, 757-767. 5. Janssen, T.W., et al. 2004, J Rehab Res Devel, 41, 787-796. 6. Goffe, W.L., et al. 1994, J Econometrics, 60, 65-99. 7. Trumble, D.R., et al. 2001, Basic and Appl Myology, 11, 91-98. 2 Copyright © 2009 by ASME