A Axis CNC THREE ROUTER DESIGN
advertisement

A THREE Axis CNC ROUTER DESIGN
by
Alexander D. Sprunt
SUBMITTED TO THE DEPARTMENT OF MECHANICAL ENGINEERING IN PARTIAL
FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF
BACHELOR OF SCIENCE
AT THE
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
JANUARY 2000
__~~X
(j'T-)(D
@ 2000 Alexander D. Sprunt
All rights reserved
The author hereby grants to MIT permission to reproduce and to
distribute publicly paper and electronic copies of this thesis document in whole or in part.
S ignature of A uthor ........................................................ ................ .................................
Dep rtment of Mechanical Engineering
January 14, 2000
Ce rtified by ............................ { .... .........
Accepted by ..........................................
MASSACHUSETTS INSTITUTE
OF TECHNOLOGY
JUN 2 8 2000
LIBRARIES1
..................................................................
Alexander H. Slocum
Margaret MacVicar Faculty Fellow
Professor of Mechanical Engineering
Thesis Supervisor
............................................................................
Ernest George Cravalho
Professor of Mechanical Engineering
Chairman, Undergraduate Thesis Committee
ACIE
ARCHIVES
A THREE Axis CNC ROUTER DESIGN
by
Alexander D. Sprunt
Submitted to the Department of Mechanical Engineering
on January 14, 2000 in Partial Fulfillment of the
Requirements for the Degree of Bachelor of Science in
Mechanical Engineering
ABSTRACT
A preliminary design of a low-cost, three-axis, computer numerically controlled (CNC)
router was completed with the goal of bringing the advantages of numerically controlled
machine tools to the woodshop. To reduce cost, a novel single rail design was
employed. The number of custom parts was kept to a minimum and, where necessary,
every effort was made to minimize manufacturing cost. The novel features of the design
include vacuum clamping, the ability to cut joinery at miter angles from 0* to 90*, and
force controlled cutting. Many of the components are used quite aggressively
(particularly with regard to stiffness), but the accuracy goal of ±0.005" in X and Y and
+0.010" in Z was met.
Thesis Supervisor: Alexander H. Slocum
Title: Margaret MacVicar Faculty Fellow Professor of Mechanical Engineering
3
List of Symbols
ball screw lead
angular velocity
Mioad
mass of the load being moved
Jtrans
inertia of the transmission
Fload
external load
Not
optimal transmission ratio
x
a length (context sensitive)
r
c
Cbuckle
constant for ball screw selection - accounts for external load
constant for ball screw selection - accounts for trajectory shape
buckling constant
kwhi,
shaft whip constant
E
P
Young's modulus
mass density
I
AX
2 nd
te
a
Cycle time (ball screw selection)
Acceleration time (ball screw selection)
b
s,
Sb
Deceleration time (ball screw selection)
Shaft whip safety factor
Shaft buckling safety factor
d
Ball screw diameter
Wd
K,
Heat dissipation in motor armature coil
Motor coil resistance
Motor torque constant
T,
F,
Torque i
Force i
J
L
Inertia i
Ra
C
dalong
Moment of inertia (for beam bending, etc.)
Cross-sectional area
Life constant for calculating linear guide life {1 05 or 5-1 04}
Load capacity (bearing and ball screw life)
Distance between two trucks along a linear guide
n
Distance between two trucks perpendicular to a linear guide
Bearing life equation coefficient
a
Angular acceleration
PO
Outside pressure
daco,,
4
P
Inside pressure
Cd
Atmospheric pressure
Volumetric flow rate
Coefficient of discharge
91
Reynold's Number
t
v
Thickness
P
Viscosity
T
Temperature
R
Ai
Ideal gas constant
Area i
q7
Efficiency
#8
G
3,
An angle for ball screws
An angle
Shear modulus
Displacement i
3
Friction force
Fn
P,
Normal force
Static coefficient of friction
Number of holes in the optical table
Pam
Q
0
Nholes
Velocity
All units are in Systeme Internationale unless otherwise noted.
5
Introduction
This thesis describes the preliminary design of a low-cost router table that brings the
benefits of computer numerical control (CNC) tools to the woodshop. The router
introduces entirely new capabilities such as full three-dimensional shaping to the shop in
addition to obviating the need for several conventional woodworking implements such as
joinery jigs and conventional table routers. Tiresome and repetitive tasks can also be
automated for superior output and increased throughput.
Cost reduction was accomplished using a novel, single rail, design that minimizes part
count and eases assembly. There are relatively few custom parts, and those required
were designed with attention to manufacturability.
During the course of the project, numerous safety, performance, and ease of use
advantages were developed for a force controlled cutting system that could easily be
implemented using the hardware that was the principal focus of this thesis.
Naturally, there is a balance between cost and performance. With that in mind, a
reasonable set of specifications was chosen and the design effort was focused on
maximizing the potential of the available hardware.
6
Specifications and Features
Footprint
Work Volume
Router
Accuracy
Feed Rate
3' x 4'6" + computer
2'6" x 5' x 10"
3 hp, 8-22 krpm, '/2" collet
±0.005" for the Y and X Axes, ±0.010 for the Z-Axis
20 fpm
Vacuum Clamping
Vacuum Chip Removal
Joinery Capable
Force Controlled Cutting
Table 1
The specifications and features were developed in consultation with Ken Stone, Director
of the MIT Hobby Shop. The last two features were added midway through the project
and will be described in detail later. See the Appendix for competitive benchmarking
data.
7
Now
Configuration
An optical table was selected as the machine's base with the intention of mounting the
table nearly vertically to meet the footprint specification. The optical table provides an
inexpensive, lightweight, precision surface that is essentially pre-configured for vacuum
clamping (see Vacuum Clamping section).
Three initial configurations were considered, one open (Configuration A, Figure 1) and
two closed (Configurations B and C, Figures 3 and 2). A structure is closed if its
components form a loop, and open if they do not. For example, a "U"shape is an open
structure, while an "0"shape is closed.
Of the closed configurations, the one with the longer axis fully supported (B) was clearly
superior. Open structures are inherently more compliant than closed structures, but are
also simpler and less expensive, so once a preliminary spreadsheet analysis of the
structure's stiffness established that it could be stiff enough, an open structure was
pursued.
Figure 1: Configuration A (Open)
Figure 2: Configuration
Fon
Figure 3: Configuration B (Closed)
8
-1
A-Axis
Fixed Supports to
elevate the Y-Axis
--...
-~
Figure 4: More complete view of configuration A
Reflection on the strengths of configuration A created configurations D and E (See
Figures 5 and 6). Configurations D and E placed the linear guide for the long axis
directly on the optical table that serves as the machine's base. This change eliminated
the need to transfer a reference surface more than a foot up from the optical table.
Placing the long axis directly on the optical table also removed any problems from the
axis twisting along the unsupported span.
9
Optical Table
Figure 5: Configuration D
10
Figure 6: Configuration E
The names of the axes will now be defined (See Figure 5 and 6). The Y-Axis is the
longest axis (over 60") and its linear guide is mounted directly to the optical table. The
X-Axis (30") extends across the plane of the optical table orthogonally to the Y-Axis.
The Z-Axis (over 10") is orthogonal to the plane of the optical table. The rotation axes
are named A, B, and C in order based on which linear axis their rotation axis is parallel
to. For example, an A-Axis will revolve around a rotational axis that is parallel with the
X-Axis, while a B-Axis will revolve around an axis parallel to the Y-Axis, and so on.
11
The essential difference between Configurations D and E is that Configuration D places
the Z-Axis at the end of the X-Axis instead of placing the X-Axis on the Z-Axis as in
Configuration E. Configuration D thus enables the router to go into and cut deep
cavities. By cantilevering so much mass, however, Configuration D will have a lower
first natural frequency. It is important that the first natural frequency be above 30 Hz., or
the machine will tend to ring. Ringing can damage the work piece and make the
machine uncontrollable. Further consultation with the Director of the MIT Hobby Shop
revealed that Configuration D had few advantages over configuration E because
woodworking rarely requires cutting into deep cavities. Such activity is largely confined
to mold and pattern making specialties, which represent only a tiny fraction of all
woodworking activity.
Consultation also revealed the great utility of having a joinery cutting capability. Joinery
is cut on the edges of boards (See Figure 7), however, and neither configuration had the
ability to work edges longer than the Z-Axis.
Figure 7: Router cutting joinery
Two methods were developed for relieving this edge length limitation. One was to
create a manual B-Axis that could cut joinery on boards mounted to a second optical
table that was perpendicular to the primary machine base (See Figure 6). The other
option was to create a manual A-Axis. The router motor would be rotated 90* and driven
to an extension to the end of the Y-Axis (See Figure 4). With either of these options,
joinery could be cut in the edges of pieces as long as the Y-Axis.
Using an A-Axis had the obvious advantages of involving fewer parts, requiring less
assembly work, and being able to cut joinery into longer edges. There were two
possible locations for the rotational joint of the A-Axis. The joint could be integrated with
the casting for connecting the X-Axis with the Z-Axis (the entire X-Axis linear module
would rotate along with the router head) or the joint could be built into the mount for the
router. The tradeoff between the two options was rather complex. The choice affected
the length of the Y-Axis, the weight of the router mount (and thus the machine's natural
frequency), how constant the machine's stiffness was, and the ease with which the
router bit could be driven beneath the level of the optical table when making joinery.
Because of these considerations, as well as various geometric and manufacturing
constraints, the A-Axis was integrated with the router mount.
12
Experiments
Cutting Forces
Before any analysis could be done to determine the structure's deflection during cutting,
the magnitude of the cutting forces had to be determined. To this end, several
experiments were done with the apparatus diagramed in Figure 8.
Wood
Router
Spring Scale
Figure 8: Cutting force experimental apparatus cross section
A number of different cuts were made in different types of wood, with different size bits,
and at different feed rates. No force over 31 N was ever observed, and cuts with forces
greater than 27 N resulted in an unacceptably bad surface finish. With this in mind, the
displacements due to cutting forces were evaluated by simultaneously applying 50 N to
each axis while the machine was in a worst case configuration. The worst case was
determined to be when the Y-Axis was set to mid-travel, the Z-Axis was at the high
extreme travel, and the X-Axis was set to the far extreme travel. This configuration
maximized the applied moments and minimized the structure's ability to resist them.
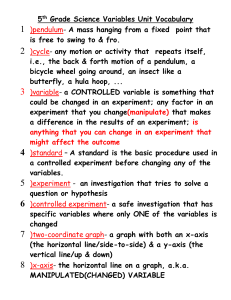
Friction With Clamping Surface
Because
3 = F,(1)
it was necessary to determine the static coefficient of friction between the aluminum top
of the optical table and the wood work piece. Machinery's Handbook gave a range of
0.2 to 0.6 for "wood on metals (clean)"', but prudence demanded experimental
verification. To that end, a block of wood was placed on a sheet of steel (the surface
material for the optical table), and the angle of the sheet with respect to the horizontal
steadily increased until the block was just about to slip (See Figure 9). The test was
performed with the wood grain both parallel and perpendicular to the direction of travel,
but the difference proved to be negligible.
Green, Robert E., ed. Machinery's Handbook.25 ed. New York: Industrial Press, 1996. p. 190.
13
mg cos(O)
mg
The block will start to slip
when 3 = mg sin(9),
which implies that
Psmg cos(9) = mg sin(O)
Figure 9: Block on an incline with force vectors
(2)
P, = mgsin(9) = tan(O)
mg cos(9)
The result after averaging several runs was that p,=0.38 (See Table 2), which is
essentially at the midpoint in the range provided by Machinery's Handbook.
Run
1
2
3
4
5
6
7
8
Orientation
Parallel
Angle
19 deg
20 deg
21 deg
20 deg
Ps
0.344
0.364
0.384
0.364
22 deg
21 deg
21 deg
22 deg
Average:
0.404
0.384
0.384
0.404
0.379
Table 2
14
Linear Guides
Because it was the fastest way to obtain a rough estimate of the necessary size, the
linear guides were selected first based on expected bearing life. Estimates of the likely
forces and moments were input into a spreadsheet along with the relevant parameters
for a number of different manufacturers' rails. Due to the unusually complex loading the
trucks were to undergo, the standard equivalent forces definition component of the
bearing life equation,
Fvertical I +
equivaent
quzvan
I
IFhorizontal +
(3)
I
(~roll-capacity)
C
ro Fr0 1
was inadequate, so after consulting with the manufacturer, a slightly modified version
was used:
Fequivalent
FI~v-
=|Fvertica
I+ |FhorizontalI+ C
q
Irpitch
Iroll I
i +rollFpitch-capacity
roll-capacity
+
~yaw~
>Ia
(4)
yaw-capacity
Fyaw
roll
rpitch
Truck
Figure 10: Definition of torques and forces
10
Life
= (equivale"
L
n
=
3
3
roller
(5)
ball
Bearings with sufficient life (5 years of 8-hour days at maximum speed with a 50% duty
cycle) were then checked to see if they could withstand the occasional shock of a 200
lbf. impact load at the spindle. Combinations with two trucks on one rail, two trucks on
two rails, and four trucks on two rails were also examined.
15
dacross
daiong
Figure 11: Diagram view of two rail - four truck
Fequivalent =
I
Fverticai +
4
IFhorizontal )+ 2
J~roll
I+
"
dacross
+tc IF.yawl
dalong
6
(+)
dalong
dacross
Figure 12: Diagram of two rail - two truck configuration
equivalent
r
=- 2 \Fvertical
roll
across
yaw
Ipitch
+ 2
(7)
+
tch-capacity
yaw-capacity
dalong
Figure 13: Diagram of one rail - two truck configuration
Fequivalent = 2 (Fvertical I+
Fhorizontal
i)j) +
2daong
I
+1pitch+1yaw
+
C
2
I
yIroll
(8)
rol-aact
The results of the bearing life analysis were used to size the rails that went into the first
solid model. Finite element Analysis (FEA) of that model suggested that the dominant
constraint would be stiffness.
The cornerstone to successfully determining the stiffness of the machine's structure was
a simple method of modeling the linear guide trucks. The truck's torsional compliance
would be the principal source of the Abbe (angular) errors, which tend to dominate in an
open structure. Successive iterations (See Figure 14) of a finite element model of just a
truck and a rail were used in conjunction with roll data (roll being the most compliant
16
mode) supplied by STAR Linear Systems to find an equivalent Young's Modulus for the
necessary trucks. The Young's Modulus could then be input into the FEA program.
0.18
0.16
Iterative Steps
0.14
0.12
0
0.10
0.08
8 0.06
0.04
Desired Output based on data supplied
by STAR Linear Systems
0.02L
0.00
2000
2500
3000
3500
4000
4500
Young's Modulus (Pa)
Figure 14: Iteration towards an effective equivalent Young's modulus
In the future, it might be better to model the truck as two parts (See Figure 15). After all,
the trucks themselves are by no means monolithic. The center section would be
"mushy" to approximate the compliance of the balls or rollers, while the outer section
would be one to one and half times the stiffness of steel. The stiff outer sections would
ensure that the loads were transmitted evenly to the compliant interior of the block. If, as
is now the case, the entire block is given a low Young's modulus adjacent parts must
provide the stiffness necessary to spread the loads throughout the block, a stiffness,
which is in fact already present in the block. Using the stiffness of adjacent parts is not
always desirable or feasible, and it is a great frustration to accommodate a design to the
analysis tool.
Figure 15: Future block with a compliant inside and a stiff outer shell
2 Bamberg, Eberhard. Ph.D. Thesis MIT Mechanical Engineering Department
17
The Router Motor
Consultation with the Director of the MIT Hobby Shop established the requirement for a
variable speed (8-22 krpm) 3 hp. router motor with a " collet. It was tentatively
assumed that an existing router would be bought off the shelf, and after being stripped of
various unnecessary elements, bolted to the rest of the machine.
There are two major varieties of routers available today: pneumatic and electric.
Pneumatic routers were attractive because they don't burn out and because they are
lighter than electric routers. Unfortunately, after consulting manufacturers of pneumatic
tools such as Sioux, Campbell-Hausfeld, and Beaver, it was found that pneumatic
routers over 1'/2hp do not exist. The higher power would require excessive flow rates at
standard shop air pressures.
The catalogs of major electric router manufacturers Sears, Porter-Cable, Bosch, and
DeWalt were therefore surveyed to determine reasonable characteristics for 3 hp.
routers. It was conservatively estimated that such a router would weight 8 kg. and
require a cylindrical envelope 5 " in diameter and 6" high.
These parameters were used in the solid model to fix associated dimensions and to
accurately assess the machine's natural frequencies.
18
Concept Refinement
Perhaps it has already become obvious, but it is very difficult to write a linear narrative
about a non-linear design process.
Version One
Version One is the first in a series of solid model implementations of Configuration E
with a manual A-Axis (See Figure 5). A single size 55 roller rail with a long style runner
block creates the Y-Axis. The Z-Axis is composed of a single size 55 ball rail with a
single truck. An integrated linear module was chosen for the X-Axis. The decision
which rails to use for the first two (Y and Z-Axes) was made principally on the basis of
bearing life and impact loading requirements. An integrated linear module was used for
the X-Axis despite its expense because it was unlikely that a better combination of
stiffness, compactness, and light weight could be designed in a short period of time.
The specific model chosen was a STAR Linear Systems MKK 2080. The MKK 2080 had
sufficient life and was the largest model before a substantial step-up in size and weight.
X-Axis
Z-Axis
Truck
Y -Axis
Shoulder
Figure 16: Version 1, note the shoulders for mounting the linear guides.
19
For the finite element analysis, the runner blocks were represented by materials
optimized to have the same torsional stiffness (See the Linear Guides section). The
integrated linear module was approximated by a rectangular cross-section beam
contrived to have the same second moments of inertia that the manufacturer supplied for
the selected linear module. Until a bracket could be designed, the part that serves as a
proxy for the router was given the stiffness of steel, but a high enough density to ensure
it would have twice the mass of the expected router. The factor of two was used to
provide a safety margin and to account for the weight of the mount.
This version showed promise, but was extremely short lived. The natural frequency of
the first mode, 23 Hz., was unacceptable but not by so much as to be without hope.
Furthermore, the casting to which the Y-Axis runner block and the Z-Axis rail were
mounted would be quite difficult to manufacture because of the required interior grinding.
Version Two
Two approaches were taken to overcoming the deficiencies of Version One. The first
was to replace the single Y-Axis rail with two smaller rails (See Figure 17). On the basis
of bearing life, size 35 ball rails were selected. The single rail for the Z-Axis was also
replaced with two rails to see if doing so had any advantages.
Figure 17: Version Two, multiple rails and runner blocks used for both the Y and Z-axes
20
Despite the cost, complexity, and other penalties, two small rails (in this configuration)
proved to have no structural advantage over one larger rail. The natural frequency
actually dropped to 20 Hz.
In hindsight, this test was probably a little unfair. The Young's Modulus of the blocks
was calibrated for roll moment loading (the blocks' weakest mode), while they were
actually loaded in compression.
Version Three
The second approach to solving Version One's problems was putting two trucks on a
single rail for the Y-Axis. To ease manufacture, the casting was simplified by removing
the troublesome overhang and using special assembly fixtures instead of shoulders for
mounting the linear guides. To increase its stiffness, the casting was closed by
attaching a plate to the back side.
Figure 18: Version Three, note the inclusion of the ball screws and the cleaner Y-to-Z
casting
This version had an acceptably high natural frequency, but the displacements due to
anticipated cutting forces were too high. The major sources of these displacements
were torsional deflection of the Z-Axis truck and bending of the X-Axis linear module.
Because the ball screw sizes had been determined by this point (See Ball Screw
Selection Section), a more complete model was created to include them, while the finite
element analysis was still done on a more primitive model to reduce the computing time.
The ball screws were mounted directly "above" the linear guides in an effort to minimize
the torque they would apply to the block and to keep the castings as simple as possible.
21
The more complete model revealed an even larger problem than the unacceptably high
displacements, however.
When the Z-Axis was driven to the bottom of its range, the X-Axis linear module
interfered with the Y-Axis ball screw. Fixing these problems resulted in a complete
redesign of the main casting in Version 4.
X-Axis linear module
interference with the
Y-Axis ball screw
Y-Axis Ball Screw
X-Axis Linear Module
Figure 19: Version Three, note how X-Axis linear module interferes with the Y-Axis ball
screw
Version Four
The main casting was completely redesigned, resulting in a number of improvements.
Solving the interference problem while keeping the height (and thus the moment of
inertia) of the casting to a minimum meant placing the Z-Axis rail on the side of the
casting directly above the Y-Axis rail (See Figure 21). This change had numerous
advantages. It reduced the distance from the center of the Y-Rail to the point of closest
approach to the router. That distance plus the 30" that the router must be able to travel
to meet the specification determines how much moment is applied to both the Y and Zrails, so reducing the length was advantageous. The natural frequency improved as
well. This change also simplified the casting connecting the Z-Axis to the X-Axis to a
plate.
FEA revealed that the structure's displacements due to the expected cutting forces were
still unacceptably high. The primary sources of this problem were bending in the X-Axis
linear module and torsion about the Z-Axis.
Several attempts were made to solve this problem. The roller block on the Z-Axis was
changed into a long style block, and steel stiffeners were added to the linear module.
These measures were partially successful. The deflection in the Y direction, which had
always been the most troublesome, was reduced to only 103% of the allowable
accuracy. A high price was paid for this rather limited success, however. The additional
mass of the stiffeners pushed the structure's first natural frequency down to a dubiously
acceptable 26 Hz.
22
Figure 20: Version Four, view 1, note the redesigned casting
Figure 21: Version Four, view 2, note the stiffeners on the X-Axis linear module
23
Version Five
Stronger measures were taken in the hopes of finally resolving the natural frequency and
cutting force displacement issues.
Slightly increasing the width of the casting connecting the Y-Axis to the Z-Axis and
moving the Z-Axis rail all the way down created enough space to replace the long truck
on the Z-Axis with two standard length slimline trucks, while increasing the height of the
casting only slightly.
The shape of the stiffeners was optimized and aluminum was used instead of steel
because of its lower density. The new stiffener shape came from tapering a triangle twothirds (See Figure 22) down the length of the linear module.
The mounting structure for the router motor was also replaced with a lighter structure
made of aluminum in an effort to create more natural frequency margin.
Redesigned
Stiffener -
Z-Rail moved all
the way down
Figure 22: Version 5
The changes were effective. The displacements were reduced to acceptable levels and
the natural frequency was increased to 41 Hz. Because the model is a simplification, the
24
calculation of the first natural frequency was done without accounting for the mass of
several components (e.g. the motors for the X-Axis and Z-Axis as well as other pieces of
transmission hardware). The addition of these components will effect the natural
frequency, but due to their light weight and proximity to the Y-Axis, the effect should not
overwhelm the available margin.
25
Force Control
During the experiments to measure the cutting loads the router would experience, it was
discovered that a person naturally performs force control when working with a router. As
the cutting forces vary due to the heterogeneity of the wood, the operator compensates
to maintain surface finish.
Torque (and thus force) sensing can be accomplished at almost no additional cost by
measuring motor current. The drive system's losses due to friction are minimal so they
can be neglected, and motor current is already an output from the servo controller.
Using force control has advantages other than improving surface finish. Because the
machine is monitoring the cutting forces, it could alert the operator when the specified
tolerance can no longer be met. With this in mind, the operator could plan a roughing
cut with high forces, and then come back in to finish the work with a less aggressive cut
that applied lower forces to the machine.
There are safety advantages as well. With knowledge of the size of the work piece's
clamping face (either input by the operator or obtained by other means) and the
available clamping pressure, the controller could set a hard limit on cutting force in order
to prevent work piece slippage.
26
Ball Screw Selection
The leads and the diameters of the ball screws were selected by matching the inertia of
the transmission (the ball screw being the primary component) with the equivalent inertia
of the relevant stage and load forces while simultaneously applying the shaft whip
constraint.
NN22 t
++r
Mla3
M
~,(9)
o trans
where
F
r=
r
2
t2
!""
"
(10)
Mload
and
(1
1
1
C =-+
a 1-b
is the equation for minimizing the heat dissipation. Naturally, when there is no external
load,
N2t
oad,
(12)
E
(13)
which results in inertia matching.
whip
A~px4
s,
is the shaft whip constraint. Combining (9) with the shaft whip constraint, the definition
of N,
,z
No,, =
(14)
the definition of lead,
2 -(15) =the second moment of inertia,
I=
64
,
(16)
the cross-sectional area,
AX = 2 ,(17)
*4
and the moment of inertia,
3J. Park and S. Kim, "Optimum Speed Reduction Ratio for D.C. Servo Drive Systems," International
Journal of Machine Tools Manufacturers, Volume 29, Number 2, 1989.
27
(18)
32
Jtrans
yields the equations:
22
d=
d 512M
7&dXE Sw
(19)
ii7
whip
and
2=
(20)
p7rxd
8
Mioad
The results of applying these-equations with a shaft whip safety factor (sw) of 0.8 to the
machine's three axes are show in Table 3.
diameter (d)
lead (1)
Y-Axis
46.92 mm
48.59 mm/rev
Z-Axis
16.12 mm
2.83 mm/rev
X-Axis
17.83 mm
12.49 mm/rev
Table 3
The buckling criterion,
Fuke,
'bukle
(21)
Cbuckle
64sbx 2
was then applied to these results. All met the constraint, but ball screws are naturally
not available in exactly these sizes, so after checking against packaging constraints and
availability, the following values were settled on:
diameter (d)
lead (e)
Y-Axis
Z-Axis
X-Axis
50 mm
20 mm/rev
16 mm
5 mm/rev
16 mm
10 mm/rev
Table 4
In the future, a better way to do this would be to plot dissipated heat,
cRa il 2m2lv
W
Wd
K2 t
load
[ N2
am
Moa
+ 12
2
N
+
r
N2
,
(22)
over a reasonable range of diameter and lead values using a 3-D plotting program.
Then, after applying the buckling and shaft whip constraints, the available lead and
diameter combinations could be plotted as points on the graph so that the power
minimizing combination could be selected more graphically and intuitively.
Finally, the candidates were tested to ensure sufficient life. The relevant life equation is:
0
Life[hours]=
Fnlen,
.
(23)
2c o
When all the candidates proved to have sufficient life, ball screw selection was complete.
28
Vacuum Clamping
Effective work piece clamping is naturally a must for this application. The safety and
accuracy of the machine depend upon it. At the same time, the clamping mechanism
must be flexible to accommodate a variety of work pieces and have a low profile so that
it does not interfere with the machine's operation. The clamping must also be quickly
and easily done. Clamping a work piece is not a value adding process.
Vacuum clamping offered a number of advantages. The operator need only set the
piece on the machine's base and open a few valves. Accommodating irregular parts
would not be a problem. There need only be one flat surface of sufficient size.
This concept fit well with using an optical table for the machine's base. Optical tables
already have holes through which the vacuum could be drawn. The optical table could
also be easily partitioned internally (See Figure 23). By sub-dividing the table, a
manifold of valves can limit how much of table vacuum is drawn through.
Optical Table
.- .- .- .- .-. . .
-..
. . ...
-.
Internal
partitions
Holes to draw
vacuum through
)0
X
Figure 23: Partitioned optical table base
The power necessary for the vacuum pump was calculated with the equation
Power = (P, - P )Q.
(24)
The flow was determined using the orifice equation:
P0
d
T=293K
t I
Pi
Figure 24: Orifice diagram and variable definitions
29
Q = A.,Cd
P-
p
I
d9i n <86.78
2.23745+64 t
(25)
1
d9" > 86.78
t
t
1.5+13.740
where
9, = pvd
(26)
P+ P
(27)
and
=
P
' .
while the pressure was set by the magnitude of the cutting forces as determined
experimentally (gravitational loads are supported by the fences).
Because of the piecewise nature of the orifice equation, the problem was solved
iteratively using a seed velocity from the Bernoulli Equation (See Figure 25).
Bernou:iill
veioty
Cd
--
93
velcQt
Figure 25: Iterative process for determining flow rate
After setting the internal pressure to 40% of atmospheric pressure, the maximum flow
(for input into equation 24) was determined by multiplying the flow through one orifice by
the number of holes in one sixth of the optical table (the standard hole pattern is 00.25"
on 1"centers).
The clamping force on any particular work piece is calculated using the equations:
F, = N
,,
Ahoe
(atm
-
i)Aclamp face
Aoptical
Famp = 3 = pF,
table
(29)
Parts with clamping faces as small as 10" x 10" can be held, and assuming that the
maximum open area on the board would be one sixth of the total area, the necessary
horsepower of the pump, neglecting the pump efficiency is 9.5 hp.
One weakness of using vacuum clamping is that while the clamping force scales with
work piece size, the magnitude of the cutting forces which the clamping force must resist
do not. One solution to this problem is to make lighter, lower force, cuts on smaller work
pieces. Another is to provide fixtures to aid in the clamping of small work pieces. The
30
fixtures would have large clamping faces (possibly coated with a high friction material)
that could in effect increase the size of the small part's clamping face (See Figure 26).
Work Piece
Fixture
Fence
- Friction Material
Optical Table
Figure 26: Clamping fixtures for small work pieces
31
Servo Motors
The input torque has several different components. The largest is the torque required to
overcome gravitational and cutting forces. Once those forces were estimated by
experimentation and calculation, they were input into the equation:
Fexternal
-
(Fgravity + F,,,,,,g
)(30)
After consultation with manufacturer's catalogs, an efficiency (q) of 90% was used. The
next major torque component is that due to the friction from the pre-loaded ball nut.
£Fpre-load
oad - F =
(31)
404~ain,8)
tan(p)=
(32)
ball-circle
Fpre-load
(33)
-
10
The sum of the external torque and the torque due to pre-loading is the required
continuous torque of the motor.
The intermittent torque requirement is the sum of the continuous torque and the
acceleration torque. The acceleration torque is found with the equation:
Facceleration
=
,
(34)
+ Jball scre
(35)
equivalenta
where
Jequivalent = Mload
2
The maximum operating speed of the motor was calculated with the equation
2 -.=
(36)
These calculations were performed for the three axes, and the results are summarized in
Table 5.
Y-Axis
Z-Axis
X-Axis
External Torque
Pre-Load Torque
Continuous Torque
4.95 Nm
1.69 Nm
6.64 Nm
0.18 Nm
0.08 Nm
0.25 Nm
0.11 Nm
0.09 Nm
0.20 Nm
Acceleration Torque
1.26 Nm
0.05 Nm
0.02 Nm
Intermittent Torque
8.61 Nm
0.30 Nm
0.21 Nm
952.2 rpm
3808.8 rpm
Maximum Operating Speed
1904.4 rpm
Table 5
These results were used to select motors in Table 6 for the three axes.
32
Continuous
Torque
Speed-Torque Curve
I
Intermittent
Torque
TORQUE
DDM-030/F-4050
TORQUE
15.8 (Nm)
13.6
11.3
9.0
Y-Axis
6.90 Nm
13.60 Nm
0.35 Nm
1.00 Nm
6.8
4.5
2.3
0
1000
2000
3000
SPEED (R.P.M.)
4000
0
DDM-005N-1003
TORQUE
(Nm)
_0.9
0.7
Z-Axis
&
X-Axis
0-5
-0.2
0
SPEED (R.P.M.)
Legend:
= Intermittent Operating Region
= Continuous Operating Region
= Drive Operation with 115 VAC
RMS Input Voltage
Table 6
33
....
Error Budget
Structure (Gravity)
Structure (Cutting)
Ball Screw Lead
Ball Screw Windup (Cutting)
Ball Screw Windup (Gravity)
Ball Screw Axial (Cutting)
Ball Screw Axial (Gravity)
Ball Nut (Cutting)
Ball Nut (Gravity)
Ball Screw Fixed Support (Cutting)
Ball Screw Fixed Support (Gravity)
Parallelism P_ (Y-Axis)
Parallelism P_1 (Z-Axis)
Parallelism P_1 (X-Axis)
A_3 (Y-Axis)
A_3 (Z-Axis)
A_3 (X-Axis)
H (Y-Axis)
H (Z-Axis)
H (X-Axis)
Y-to-Z Casting
Z-to-X Plate
Optical Table
Total
RMS (of non-zero values)
Average of Total and RMS
Goal
Y
X
0.68 pm
7.70 pm
35.91 pm 70.08 pm
7.00 pm 15.40 pm
0.04 pm
0.42 pm
0.00 pm 1.09 pm
1.29 pm
0.35 pm
0.00 pm 8.69 pm
0.14 pm 0.04 pm
0.00 pm 0.97 pm
0.15 pm 0.04 pm
0.00 pm 0.97 pm
22.00 pm
0.00 pm
8.00 pm
8.00 pm
0.00 pm 12.50 pm
15.00 pm
0.00 pm
15.00 pm
0.00 pm
0.00 pm 15.00 pm
0.00 pm 0.00 pm
0.00 pm 15.00 pm
0.00 pm 0.00 pm
2.00 pm 10.00 pm
1.00 pm 20.00 pm
0.00 pm 0.00 pm
108.59 pm 185.85 pm
18.76 pm
13.42 pm
Comments
Z
0.42 pm
31.62 pm
5.00 pm Accuracy grade 5
0.04 pm
0.09 pm
0.47 pm
1.04 pm
0.14 pm
0.32 pm
0.15 pm
0.34 pm
22.00 pm H Accuracy Class
0.00 pm H Accuracy Class
12.50 pm H Accuracy Class
0.00 pm H Accuracy Class
0.00 pm H Accuracy Class
0.00 pm H Accuracy Class
15.00 pm H Accuracy Class
0.00 pm H Accuracy Class
15.00 pm H Accuracy Class
2.00 pm
1.00 pm
101.60 pm 0.004" optical table
208.74 pm
26.29 pm
61.01 pm 102.31 pm
117.51 pm
127.00 pm 127.00 pm
254.00 pm
Table 7
The errors due to structure, both gravity and cutting, were determined using FEA.
Software compensation is used to filter out 95% of the gravity loading and 80% of the
ball screw lead error. Budget items "Ball Screw Lead," "Parallelism," "A3," "H," and
"Optical Table Flatness" were taken from the relevant manufacturers' catalogs. Ball
screw windup was calculated with equation
(37)
gshaft windup =
,xdG
,
which reflects the axial stiffness of the ball screw back through the encoder. Ball screw
axial deflection was calculated with equation
4xF
axial =
2
rrd E
.
(38)
The errors due to ball nut and ball screw mount deflections were accounted for using
stiffness data supplied by the manufacturer. The errors due to the Y-to-Z and Z-to-X
34
W
transition castings were calculated by programming a 10 arc second per meter grinding
error on each surface and evaluating the displacement of the router bit.
Finally, to convert all of the worst-case assumptions to a more "typical" series of errors,
the root-mean-square of all the non-zero errors was averaged with the sum. These
results suggest that it might even be possible to tighten the specification for the X and ZAxes.
35
Conclusion
Going forward, there are still several open issues.
The linear guides and ball screws need contamination protection. The X-Axis linear
module has integrated seals, but the ball screws and linear guides for the Y and Z-Axes
are currently unshielded. Because the ball screws are directly above the linear guides,
both might be covered by a single set of bellows.
The addition of vacuum chip removal should not be a problem. Ducting will have to be
run from the router bit area back to the base of the machine, but surplus vacuum can be
easily drawn from the clamping system.
The biggest remaining challenge is probably the pivot for the A-Axis. The pivot mount
must be both lightweight and stiff. Lightweight so that it does not unnecessarily erode
the natural frequency margin, and stiff so that it does not add to the error budget
significantly. Naturally, the pivot will have to be adjustable, but the locking mechanism
will have to be designed with vibration in mind. It would probably also be a good idea to
include a potentiometer (or equivalent) so that the controller can measure the angle of
the pivot. The controller must know the set angle so that it can match it when cuffing at
miter angles other than 00 and 90*.
36
Appendix: Competitive Benchmarking
Name
Company
Work Volume
Feed Rate
Repeatability
Accuracy
Spindle
Clamping
URL
Comment
Price
The AutoRout Router Series
AutoRout Inc.
5'x5', 5'x8', 5'xlO',5'x12'
Name
Company
Work Volume
Feed Rate
Repeatability
Accuracy
Spindle
Clamping
URL
Comment
Price
AXYZ Series
AXYZ Automation Inc.
39"x39"x6" to 150"x99.5"x6"
300 ipm
Name
Company
Work Volume
Feed Rate
Repeatability
Accuracy
Spindle
Clamping
URL
Comment
Price
RT Series
BobCAD CAM Inc.
8'x4'xlO"
200-1000 ipm
Name
Company
Work Volume
Feed Rate
Repeatability
Accuracy
Spindle
Clamping
URL
Comment
Price
Multiple, 7-12 hp
Vacuum, 10-30 hp
www.autorout.com
drills, saws, 4th Axis
$53,296 Base
1.5-7.5 hp
www.axyz.com
0.005"
Multiple, 3.25 hp
Vacuum optional
www.bobcadcam.com
THK or STAR Linear Guides
$15,000-$47,000
CNT 1000/900 Series
CNT Motion Systems
60"x120"x5"
1000 ipm
Multiple, 0.5-3 hp
Vacuum, 10 hp
www.cntmotion.com
$13,000-$45,000
37
Name
Company
Work Volume
Feed Rate
Repeatability
Accuracy
Spindle
Clamping
URL
Comment
Price
Name
Company
Work Volume
Feed Rate
Repeatability
Accuracy
Spindle
Clamping
URL
Comment
Price
Name
Company
Work Volume
Feed Rate
Repeatability
Accuracy
Spindle
Clamping
URL
Comment
Price
Name
Company
Work Volume
Feed Rate
Repeatability
Accuracy
Spindle
Clamping
URL
Comment
Price
38
Thermwood Router Series
Thermwood Inc.
5'x5' to 5'x20'
1500 ipm
0.002"
4-15 hp
Vacuum
www.thermwood.com
Turret head, 5 Axis available
$40,000-$120,000
200-600 Series
Gerber Scientific Products
35.4"x31.4"-6'8"x10'
600-54 ipm
Vacuum
www.gspinc.com
CNC Mini-Router
Minitech
www.minitech.com
"Portable"
$9,500
Camtool
Larken Automation
24.5"x24.5"x5" to 100"x150"x6"
200 ipm
±0.001
1.5-3 hp
T-slot or vacuum
www.storm.ca/l-arken/
$7,000 - $30,000
Name
Company
Work Volume
Feed Rate
Repeatability
Accuracy
Spindle
Clamping
URL
Comment
Shoda NC-1
Shoda USA
0.5m x 1.Om x 0.4m
Up to 3, 12 hp
Vacuum clamping or T-Slot
www.shodausa.com
tilting spindle, very industrial
Price
Name
Company
Work Volume
Feed Rate
Repeatability
Accuracy
Spindle
Clamping
URL
Comment
Price
Name
Company
Work Volume
Feed Rate
Repeatability
Accuracy
Spindle
Clamping
URL
Comment
Price
Name
Company
Work Volume
Feed Rate
Repeatability
Accuracy
Spindle
Clamping
URL
Comment
Price
ShopBot Personal Robotic 96
ShopBot Tools Inc.
8'x4'x7"
200 ipm
0.01"
bracket for any standard router
user built from parts
www.shopbottools.com
Super Tech and Associates
36"x23.5"x2.375"
150 ipm
DeWalt Router
www.super-tech.com/root/i
DaVinci Production Center
Techno-Isel
8"x8"x6.8" to 59"x96"xlO.8"
0.75 hp to 7.5 hp
Vacuum or Clamp bar
www.techno-isel.com
39