A METHOD FOR DETERMINING AIRDROP SYSTEM CHARACTERISTICS
advertisement

A METHOD FOR DETERMINING
AIRDROP SYSTEM CHARACTERISTICS
FOR MINIMUM ALTITUDE LOSS TO
EQUILIBRIUM
by
MAURICE PAUL GIONFRIDDO
B.S. in A.E.
Massachusetts Institute of Technology
(19
5 3)
SUBMITTED IN PARTIAL FULFILLMENT
OF THE REQUIREMENTS FOR THE
DEGREE OF MASTER OF
SCIENCE
at the
MASSACHUSETTS INSTITUTE OF
TECHNOLOGY
January, 1969
A
Signature of Author.
Department
o..f
Aeronautics and
As t r Qnauti cs, Jan. 2,
Certified
by .
1969
. . .
Thesis Supervisor
Acceptedby.......
·
* *·. r
* * * *· * *
·
·
*~
· · I*
1l ,1 ·
Chai ran,
*
·
e
·
*
·
*
® ·
*
Departmental
on Graduate Students
I:;
0
.~~~~
"~···1·
.RRAPI
1969
f 7-,
't
*·
· ·
···
**
* ·
Committee
A METHOD
FOR DETERMINING
AIRDROP SYSTEM CHARACTERISTICS
FOR MINIMUM ALTITUDE LOSS TO
EQUILIBRIUM
by
MAURICE PAUL GIONFRIDDO
Submitted to the Department of Aeronautics and Astronautics
on January 1969 in partial fulfillment
for the degree of Master of Science
of the requirement
ABSTRACT
The equations of motion of a two-body parachute-cargo
airdrop system, derived in previous unpublished work, by
the author,were corrected,
the range of values of the initial
conditions and systems characteristics
was expanded, and
solutions to the equations were recomputed on a digital computer. The computer results were analyzed in detail and
analytical expressions for the calculation of system natural
period and damping ratio were derived.
Empirical relationships between system variables were
studied. During this study, a rather simple relationship
between maximum system rotation and minimum altitude loss
to equilibrium was discovered.
The results of this work indicate that:
1.
The later
portion
of an airdrop trajectory, that
is that portion of the trajectory
after the system has attained
its maximum rotation from the horizontal, can be described
within reasonable accuracy by a linear, second-order differential equation with constant coefficients.
2.
An expression
for the natural
period
of the cargo
oscillations during the later portion of the trajectory can
be derived
in terms
of the physical
characteristics
of airdrop
systems and yields values which, on the average, are within
13Z of the values obtained from the more exact computer solutions.
3.
An approximate expression
of the cargo oscillations
for the damping ratio
during the later portion of the
2
character-
in terms of the physical
can be derived
trajectory
istics of airdrop systems and yields values which, on the
average, are within 2% of the values obtained from the more
exact computer solutions. However, in an individual case,
the approximate damping ratio may vary from 52% to 129% of
the value obtained from the computer.
4.
The major reason for the large variation bedamping ratios and those obtained from
the
approximate
tween
computer solutions is the inappropiateness of the assumption
that the
airdrop
5.
system
rotates
about
a fixed axis.
For any airdrop system, the value of the maximum
system rotation
that occurs during the trajectory
is a unique
criterion for determining whether the resulting altitude
loss to equilibrium is
minimum possible.
the
Minimum al-
titude loss to equilibrium occurs when the maximum system
rotation,
When ,
ma8x.
,
is within
a few degrees
of 100 degrees.
is less than or greater than 100 degrees, the
resulting altitude loss to equilibrium is greater than nec-
ess ary.
m,, ,, is affected
6. Maximumsystem rotation,
primarily by parachute-cargo line length and parachute opening time.
7. Within the range of variables
thesis, the values of non-dimensional
considered in this
parachute-cargo line
length,L , and non-dimensional parachute opening time,
altitude loss to equili, that result in minimum
(4 -2)
brium are related by the expression:
L 0.645 X- r)o?.
Thesis
Title:
Supervisor:
Eugene E. Covert
Professor of Aeronautics and Astronautics
3
ACKNOWLEDGEMENTS
The author wishes to express his appreciation to Professor
Eugene E. Covert of the Department of Aeronautics
and Astro-
nautics for the encouragement and guidance that he provided
throughout the preparation of the thesis.
est in the progress
of the work
provided
His sincere interme with
a good deal
of additional incentive.
Appreciation
is also due to the US Army Natick
Labor-
atories for providing me with such an excellent opportunity
to further my education, to the M.I.T. Center for Advanced
Engineering Study for furnishing me with such excellent study
and computational
facilities,
and to Mrs.
Elaine
L. Clark
her fine typing of the manuscript under rather trying conditions.
4
for
TABLE OF CONTENTS
Page
NOTATION
7
INTRODUCTION
10
COMPUTATIONS
14
ANALYSIS
15
RESULTS AND DISCUSSION
24
Comparison of Approximate Natural
Periods with Computer Solutions
24
Comparison of Approximate Damping
Ratios with Computer Solutions
25
Relationship of Maximum System
Rotation to Minimum Altitude Loss
to Equilibrium
27
CONCLUSIONS
32
APPENDIX A - EQUATIONS OF MOTION FOR TWO-BODY
AIRDROP SYSTEM
34
TABLES
38
FIGURES
46
REFERENCES
57
5
LIST
TABLEI
OF TABLES AND FIGURES
- Summary of Initial
Conditions
and Airdrop System Characteristics
38
TABLE I
- Summary of Results
42
FIGURE 1
- Comparison of Calculated and Measured
Cargo Trajectories
46
FIGURE 2
- Variation of Altitude Loss to
Equilibrium with Parachute-Cargo
Line Length
FIGURE 3
FIGURE 4
FIGURE 5
- Variation of Altitude Loss to · Equilibrium with Parachute Opening Time
48
- Typical Phase-Plane Trajectory of
an Airdrop System
49
- Diagram of Airdrop System Rotation
about
FIGURE 6
FIGURE 7
FIGURE 8
FIGURE 9
47
a Fixed
Center
50
- Typical Variation of Airdrop System
Parameters with Time
51
- Variation of Airdrop System Center of
Rotation with Rotation Angle
52
- Variation of Maximum System Rotation
with Parachute Opening Time
53
- Variation of Altitude Loss to Equilibrium with Maximum System Rotation
54
FIGURE 10 - Variation of Optimum Parachute Opening Time with Parachute-Cargo Line Length
55
FIGURE 11 - Variation of Minimum Altitude Loss to
Equilibrium with Parachute-Cargo Line
Length
56
6
NOTATION
Co
drag coefficient
DP
parachute
drag
length of parachute suspension lines
distance from parachute center of gravity to
center of rotation of airdrop system. (Measured
in percent
).
of
I
moment of inertia of airdrop system about a
horizontal axis through the system center of
gravity
k
spring constant of parachute-cargo line
length
of line joining
centers
of gravity
of
parachute and cargo
Ir
length
Da
of parachute
increase
L
in line length
non-dimensional
MrM4"
1'
cargo
mass
reefing
line
due to tension
form of
mass
of included
air in parachute
total mass of parachute; the sum of canopy mass,
included air mass, and additional. air mass
mass of parachute canopy
non-dimensional form of
non-dimensional form of
M?
non-dimensional
form of
non-dimensional form of
f'
Mr
Sc
cargo reference area
Sb
aerodynamic penetration
SF
projected area of parachute
Sr0
projected
,5p
area of fully open parachute
non-dimensional form of S
~F~~~~~~~~~~~~~~~~~~~~~~~~~~1
7
t
time
tf
parachute filling time - measured from line
stretch
to full open
tr
time from line stretch to reefed condition
T
non-dimensional dampednatural period of airdrop
Th
non-dimensional natural. period of airdrop system
V
velocity
V
velocity of cargo with respect to aircraft
t- O
IV
non-dimensional form of V
WC
cargo weight
X
horizontal distance
system
X
non-dimensional. form
at
of X
vertical distance (altitude loss)
non-dimensional form of
non-dimensional altitude loss to equilibrium
for the cargo
ic
sthe
ma,
non-dimensional
altitude
aircraft
a mo~
altitude
loss
of the cargo from
to the altitude
where
occurs
06
angle of attack
r
non-dimensional form of
mass ratio
if'
damping ratio
damping ratio calculated using values for
obtained from computer solutions
orientation
of airdrop system with respect to
horizontal
9.~
value of
h
e
at peak of 1st oscillation
8
ema
I value
of
e
at peak of 2nd oscillation
additional mass factor
e
air density
Z'
non-dimensional form of t
(27-4)
non-dimensional time for parachute to fully open
from reefed condition
time at which G,
non-dimensional
0I
angle between velocity
3n
non-dimensional natural
system
occurs
vector and horizontal.
frequency of airdrop
Subscripts
a.
aircraft
C
cargo
CCIC.
calculated from approximate analytical expressions
co n1'
obtained from computer results
e
equilibrium
O
initial condition
P
parachute
9
INTRODUCTION
The operational ability to successfully airdrop large
cargoes from rear-loading aircraft flying at altitudes below
80o feet has been
a Department
of Defense
goal
for some years.
This ability would greatly reduce the chances of the aircraft
being detected by enemy surveillance devices and would increase the airdrop accuracy by reducing the amount of time
that the parachute
and cargo
the unpredictable winds.
are subjected
to the effects
of
Efforts to achieve a low-altitude
capability have been underway for some time and have not yet
been completely fruitful.
Presently, the minimum airdrop altitude is determined
almost entirely by the amount of altitude required for the
airdrop system to reach equilibrium conditions: that is, when
the cargo reaches terminal velocity and the parachute and
cargo are in a vertical orientation.
Thus, decrease in air-
drop altitude can come about only by decreasing the vertical
distance required to attain equilibrium conditions.
Typical
solutions to this problem have used aerodynamic or mechanical
means to decrease the opening times of the parachutes.
This,
of course, results in the full drag area of the parachute being
applied earlier in the trajectory.
be based
trajectory
on the rationale
of a point-mass,
derived
i.e.,
This approach appears to
from consideration
the greater
of the
the decelerating
Force, the less altitude required to reach equilibrium.
ever,
in an airdrop
of a cargo
from 8f)0 feet altitude,
Howthe
typical distance between the parachute and cargo centers-of-
1.O
gravity
is on the order
of 150 feet.
As might then be ex-
pected, measured flight trajectories of parachute-cargo airdrop systems are quite different from point-mass trajectories.
Thus, basing airdrop system designs on the characteristics
of point-mass trajectories may not be a logical approach and
may not result in the desired improvements in system performan ce.
Analyses to determine the trajectories of two-body parachute-cargo airdrop systems
have been conducted.
analyses of references 1 and 2 were used
development
of a specific
low-altitude
1,2,3
as bases
The
for
the
cargo airdrop system
which did not deviate too greatly from standard airdrop systems.
As a result, the analyses did not have sufficient scope to
determine basic differences in the response of point-mass and
two-body systems to variations in system characteristics.
The
analysis of reference 3 was conducted primarily to determine
the forces
being
exerted
on the cargo
and the motion
of the cargo
itself about its own center of gravity.
In an unpublished study by the author, equations of motion
of a two-body parachute-cargo
a digital
airdrop
system were solved on
computer using the major assumptions that the drag
area and the included air mass of the parachute were constant
throughout the trajectory.
tions
for the transient
These were not very realistic assump-
portion
of the trajectory,
but
the cal-
culated trajectories were similar enough to actual trajectories
to provide a reasonable basis for determining trends.
The major
conclusions arising from this study; that the parachute-cargo
11
line length significantly affected altitude loss to equilibrium
and that there
parachute
is an optimum
opening
time
for minimum
altitude loss to equilibrium; were intriguing enough to spur
on additional study.
In the additional study, also unpublished, the equations
of motion were changed to take into account the increase of
drag area and included air mass of the parachute with time
until
the parachute
was
fully opened.
In this case,
the com-
puted trajectories were very similar to measured flight trajectories.
A typical calculated cargo trajectory is shown in
'Figure 1.
Included
in the figure
for comparison
is a trajectory
obtained from actual flight test with initial conditions and
system characteristics generally similar to those of the calculated trajectory.
Unfortunately, the flight test data, like
most airdrop flight test data,were not complete enough to insure
that all conditions for the calculated and actual trajectories
were identical.
trajectories
trajectories
On this basis,
the close similarity
between the
indicates that the equations do predict cargo
reasonably well.
The results
of the additional
chute-cargo line-length
study again showed that para-
and parachute filling
factors in achieving minimum altitude loss to
time were major
equilibrium
and
that initial cargo velocity, initial cargo deceleration, and
aircraft flight path inclination do not significantly affect
altitude
Although the study did furnish
loss to equilibrium.
these important conclusions, the scope of the work was limited
in that it did not
consist
of a systematic
12
variation
of all
the initial conditions and system parameters over a sufficiently
wide range to insure inclusion of all possible design ramifications of airdrop systems.
Although it is within reason to
obtain
a large enough
of solutions
permit
a complete
number
parametric
from the computer
study of the problem,
it was
to
felt
that effort to obtain a closed-form solution, either exact or
approximate, might be more fruitful.
Therefore,
it is the purpose
of this thesis
to derive
an
explicit method for determining the airdrop system characteristics that will result in minimum altitude loss to equilibrium.
The effort
expended
to obtain
such
a method
and the results
that
permit the design of an airdrop system for minimum altitude loss
to equilibrium
are presented
in this paper.
13
COMPUTATIONS
The
first
step in the derivation
of a closed
form solu-
tion to the equations of motion was to analyze more fully
thecomputer
results
During
of the previous unpublished study.
the analysis, an error was discovered in the equation used to
calculate
Thus,
the included
a portion
air mass of the fully open parachute.
of the effort
on this thesis was
of all of the previous
the recomputation
sult of the recomputations,
altitude
devoted
As a re-
solutions.
losses
to
to equilibrium
and optimum parachute opening times changed on the order of
10 to 20 percent.
Also, additional cases were solved in those
instances where supplementary data were required to firmly
establish the existence of important trends.
The corrected non-dimensionalized
free-body
to limit
dix A.
istics
diagram
they are based
the complexity
equations of motion, the
on, and the assumptions
of the equations
are presented
used
in Appen-
The values of the initial conditions and system characterfor the 58 cases solved
are presented
in Table
I.
In
each case, the trajectory solution was carried out to an arbitrary
equilibrium condition which was defined as the time when the parachute-cargo orientation is within 5 deerees of verticl
ultaneously,
the cargo
velocity
and, sim-
is less than 1.05 times the equil-
ibrium velocity.
Case
was
chosen
to be a reasonable
approximation
of a
typical airdrop where a 3250-lb. cargo is airdropped from an aircarft
flying
at an airspeed
of 130 knots
14
using
a
19n-ft. solid,
flat circular parachute for extraction and recovery.
The
remaining cases constitute a limited systematic variation
in those airdrop system parameters considered most significant.
Values from the comnuter results are
The significance
of the unpublished
of the conclusions
line length
parachute-cargo
resented in Table II.
and parachute
opening
work
that
time are im-
portant system characteristics in determining altitude loss to
equilibrium
can be seen
in Figures
2 and 3.
These
figures
are corrected and supplemented versions of the figures presented
In Figure 2, the double curve for
in the unpublished study.
values
of L greater
than 2, and in Figure
3, the remoteness
of some data points from their associated curve is caused by
is defined
the fact that equilibrium
values for
and
Vc .
as a range of allowable
Because of the oscillations of the
cargo, the equilibrium conditions can be approached from either
boundary
of that range:
lation where
@E
Vc
that is, during
is less than 1.05
can reach equilibrium
times the equilibrium
by approaching
from smaller values of the angle or the
larger values of the angle.
4a
that part of the oscil-
the 85-degree
velocity,
boundary
5-degree boundary from
ANALYSIS
Early in the detailed
it was
analysis of the computer results,
found that plots of system rotation
non-dimensional
time,
angle,
G
, versus
, looked very similar to curves
describing the response of a linear second-order system with
constant
coefficients
to a step input.
A phase-plane
plot 4 of
Case 1, presented in Figure 4, shows the characteristic
of a damped second-order
Graphical
measurement
spiral
system responding to a step input.
of the slopes of the spiral at
e
= 90
gave, within the accuracy of measurement, identical values of
the slopes except for the first
time the spiral. crossed
values of the slopesat Q.90*
Identical
a linear second-order system with
evidence suggests, then, that
=90
is a characteristic
constant
the later
coefficients.
portion
.
of
This
of the trajec-
tory, beginning somewhere between the first and second crossing
of
e
= 90
°
, is closely or exactly
characterized
by a linear
second-order differential equation with constant coefficients,
Why an airdrop system with aerodynamic
damping forces that are
a function of the square of the velocity
by a linear differential
equation
can be described
is not known, but is worthy
of future consideration.
In order to gain analytical
some of the equations
substantiation
of motion of Appendix
of this discovery,
A were manipulated
in the following manner:
The non-dimensional differential equation describing the
time variation
of system
rotation is given as:
15
(1)
d't
F,)
(-V sirnac - V s
-L
(L +P/)VShX
Differentiating this yields:
d~d2
(2)
d *1t28 (t r) [(Mc C SAC
0t
+ Sin
a
-(V ' cos%
The given expressions
(3) "
S
in
(3) can be reduced
, and
and, after
(2),
the following resulIt is obtained:
-
-
-(LtrJ -t
Equation
d_
d,
into equation
simplification,
+ (L/
+ sL
d
dV-
substituted
are appropriately
some algebraic
for
V
sina
PCP)cose
to the standard
-=o
form for a linear
second-order differential equation with constant coefficients
as given below:
+ 2SW,,1e
aja
where
+ ze=o
:
-, damping ratio
C
if it can
n
= natural frequency
be shown that the term
in the form
expressed
(can)
K
in the form,
K;
can be expressed
16
vr
where K
-
4o
and by changing
for the measurement
the reference
(L+P)(
form
(3):
P)e
No exact method for expressing
the
Changing
for the last term of equation
following expression
in
e
axis and assuming small angles results in the
the reference
(3)
axis.
axis to the vertical
from the horizontal
of
K dT
the second term of equation
can be found.
However, an approximate
method has been developed and is described below.
Approximate Dampina
Ratio
It is assumed that, during the later part of the airdrop
trajectory, the airdrop system is oscillating in a vertical
plane about a fixed center of rotation
(See Figure 5).
should be pointed out that the fixed center of rotation
not necessarily
It
is
the center of gravity of the system, since
forces rotate about instantaneous
bodies acted upon by external
centers of rotation which
are determined
by resolution
of the
.5
Referring
to figure 5,
it can be seen that the tangential
components
of the cargo
instantaneous
and parachute
respectively.
forces and moments
velocities are
gives the following
V SLron ( -h)(L +r) ae
VC
and Vr
?snoL
Converting the tangential velocities to rota-
tional velocities
(4)
VcsLtV
c
4
17
equations:
", san)p=-h(Le
(4a
Figure 6 shows that,
velocity,Vc
for Case 1, the non-dimensional
, reaches a value of 1.0, i.e.,
cargo
equilibrium
c.
velocity, slightly before the airdrop system reaches
and never
varies substantially
from that value after that.
This is true for all the trajectories
where
there are well-
definedoscillations.
Thus, throughout this analysis,
assumption is made that Vc
the
.1 .
Using this assumption and substituting
(4a) into the second term of equation
equations
(4) and
(3) gives:
CO SpC(k)J de
5Mre
SoD sJ
and
given trajectory.
Cr/ $
are constant
Therefore,
center of rotation,
with the assumption of a fixed
the second-order
ducedto the standard form of a linear
ential equation with
for any
equation in
is re-
second-order differ-
constant coefficients
and is given below:
(5)
The natural frequency of the oscillation is
coefficient
()
of the
C391
_ ~Ti
ewterm:
r_
given
by the
the natural
period by:
T
(6a)
ZTT
and the damping ratio is given by the coefficient
of the
/d t
term divided by 2.
-c
-)/5
(COsp/ 2My)()
2 c
Center of Rotation
In order for the expression
for damping ratio to be
useful to the airdrop system designer,
center of rotation
must be capable
of beingzcalculated from
the knownsystem characteristics.
in the lateral
tarily
5.
direction
it is assumed
equilibrium
direction
equivalent
velocity,
are zero.
The external forces acting
on the airdrop system as it is momen-
stopped in its rotation
Since
that
at
g90
the airdrop
the net external
are shown in Figure
system
is at its
forces in the vertical
The lateral forces can be replaced by an
force acting at the center of gravity and a torque
about the center of gravity.
The instantaneous
rotation is found by determining
or without
the location of the
the
acting at c.g.
to rotation.
system
just
balanced by the
?CeCpSFVsLn
Sacp
Ad
due to the force
opposite acceleration due
acting at the center of gravity
is:
V si n o
the location of a point within
that has its acceleration
The acceleration
center of
sz
The torque acting about
the center of gravity is:
L
CPSV.5Ln'
The moment
5.
k)(-
.
5$CV
A&t
of inertia of the system about its center of
gravity is:
(8)
At
I
the
of the
=
M~,(I -Ef t
MFC- (-R+-,&
instantaneous center of rotation, the algebraic sum
linear acceleration
tion wi 11 be zero.
and the acceleration
due to rota-
This gives the following equation:
Z~~w
V-Dnt
MC'
,
Z
..
ecsV's,(
....
n
=
simplifying, non-dimensionalizing, and rearranging yields
the following
characteristics
(9 )
6h
implicit equation
for
h
in terms of system
:
e
Sb(M( C-i)}
+
X(-)4N Mf-/VI
I~ 13
tesBe- SbcY2
mrl-(-)
Use of the quadratic
formula will
and negative real value for
any physical significance,
.
=r
-
hA
r (I O
=-
0
result in a positive
Only the positive value has
since most negative
20
'0W1jg
M
values of
h
damping ratio which is an unreal-
would result in a negative
istic condition for the airdrop system.
Initial Conditions
A final requirement
to completely
the initial
describe
conditions
Analysis
to be fulfilled in order to be able
the oscillations
for the later portion of the trajectory.
of the plot of
e
versus
technique,
that
is,
(Figure 6) showed
decre-
by calculating the logarithm of the
peak and the subsequent
of the amplitudes of the initial
ratio
Z
using the logarithmic
that the damping ratio determined
ment
of
is the knowledge
peak yielded values of the damping ratio that were very close
to those
obtained
from the phase-planeplots. This impliesthat
the airdrop system behaves like a linear
with constant
peak, GK
rotational
coefficients
at least
Also, precisely
velocity,
from the time of the initial,
at the time of
rMX ,the
is zero (See Figure 4). Beyond
d/2z
that time, the parachute
second-order system
drag area remains constant and the
cargo velocity does not deviate greatly from its equilibrium
velocity.
For these reasons, the point in the trajectory where
r occurs forms a convenient,
boundary between the earlier
mathematically
and later
apropriate,
portions of the trajectory.
Choosing this point automatically yields one of the two required
initial
condition
conditions , i.e.,
is the value of
d/d
=O
.
eax
e
only from an analysis of the earlier
21
The other required initial
This valuecan be determined
portion of the trajectory.
Earlier Portion of Traecto .
An attempt
ther an exact or approx-
was made to der
imate closed-form analytical so
for the earlier part
of the trajectory and especiall
the boundary conditions
at
At zero time,
the
rotation
At time for
the airdrop system is zero.
velocity of the system is
ocity known
again zero.
and velocity of
),
, the rotational
With the rotational
that a likely approach would be
it appeared
to consider the angular impulse and momentum
the parachute-cargo combination
at Zc,
relationships
and .%r
In general,
t
=.I L ) (I Cie
)i
t,
(~dZ~/d)
- (/1t)
tz
ri
e 'j
Introducing expressions
the parachute
the external torques applied to
for
simplifying yields:
and cargo and
Tv ) Sf.
vel-
at the b oundaries of the earlier portion
to be zero
of the trajectory,
al acceleration
S;rnco
I\-
-
S&c_'
-()
ri"Cv
+ 9 (I- I- .E
-At)
22
O
of
this expression,
In order to integrate
S
, V,
ip ,
V ,cAt
of S
the variation
e
and
with
with time must be known.
time is known exactly.
analysis of the plots of Vc
time during the
and
,,
, V
of Vc
of
Only
Graphical
versus
showed that
earlier part of the trajectory
while the variations
and Vp with time could be closely
by simple exponential
approximated
the variations
functions,
the other terms
were not easily describable.
Reference to the literature showed that iterative computer
solutions
are generally employed
tories
or,
ited to
as in the
those portions
case
to analyze airdrop trajec-
of Reference
7, analysis
of the trajectory where the assumptions
that the cargo path is horizontal or is vertical
accurate.
is lim-
are reasonably
Thus it appears that an analytical expression for
cannot be obtained.
23
RESULTS AND DISCUSSION
Comparison of Approximate Natural Periods with Comuter
Solu-
tions
The natural periods of the airdrop system, as determined
by noting
the times between
the maximum
amplitudes
of the
oscillations indicated by the computer solutions, were compared with the natural periods calculated according to equaIn
tion (6a).
amplitudes
period,
reality,
the measurement
results in determination
of the time between
of the damped natural
T, which differs from the natural period,T n , by
a factor involving
T
However,
the damping ratio, that is:
TV
in almost every case, the damping
ratio,
S
, was
small enough in magnitude so that the difference between T
and
Th
,
generally
T'he comparison
cases, where
less than 3,
was neglected.
showed that, for the average of the 41
the frequency
could be measured,
the natural
periods calculated according to equation (6a) were 137 higher
than the damped natural
sults.
periods derived from the computer re-
In the worst case, the calculated natural
31Z higher
than that
eriod was
derivedfrom the computer resultsand,
in the best case, the calculated natural period was 4% higher.
The poorer correlations occurred for those cases with the
shorter parachute-cargo line lengths where the oscillations
were
ust barely discernible.
In the nominal
case, Case 1,
which has a well-defined oscillation, the calculated natural
period was 9
higher.
A critical
comparison with actual flight
test data is not possible
since the system rotation angle,
is not generally
or reported.
it has been,
measured
0
,
In those cases where
a complete enough record of initial conditions
and
system characteristics is not available.
Since no approximations were required
term in equation
efficient
of the
to derive the co-
(5),the differences
between the calculated natural periods and those obtained from
the computer
solutions
of the assumption
must arise only from the inappropriateness
that all the coefficients
of the terms of
equation (3) are constants.
Equation
( I - M'r/Mp
)
(6) can be simplified
is essentially
by noting
that the term
1.0 for almost all parachutes
and that in most cases, the line stretch due to tension,
can be neglected.
(10)
Natural period is now given by:
ZTr
T
T
Comparison ofApproximate
Damping Ratios with Computer Solutions
Comparison of the damping ratios
equation
calculated according to
(7) and based on the locations
of fixed centers
rotation calculated according to equation
correlation with the damping ratios
solutions.
from 0.067
r
obtained
of
(9) showed fair-to-good
from the
computer
The computer solution damping ratios ranged in value
to 0.277, while
value from.024
to .181.
the calculated
damping ratios ranged in
The average value of the ratio, fc^i./Jo
25
in Table II for 38 cases,
tabulated
on the whole,
there is excellent
of the ratio for individual
to as high as 1.29.
was 0.98.
Therefore,
correlation.
cases varied
This individual
However,
values
from as low as 0.52
correlation
is not as
good as desired.
As a first
large
step
differences,
in investigating
the locations
the reason for these
of the centers of rotation,
calculated according to equation (9), were compared with the
locations obtained from the computer solutions.
case
(except case numbers
of the coefficients
results
was calculated
is assumed
length
26, 27, 28, 29 and 40) the values
of h
in an unchanging
in
equation
(9) are identical,
h
from case to case.
value for
to be 0.134;
to be located
lation,
of the computer
the location
13.4% of the parachute-cargo
center of gravity.
results shows
the parachute
for which
oscillation
equation
in Figure 7.
incidental
where
This relatively
since values of
good prediction
n
at
at
=- 90
(9) was derived,
imately 0.15, compared to 0.134 which is
(9).
and cargo
with system rotation
figure shows, also, that the value of h
tion
Yet, in-
that during any oscil-
The variation of
angle is shown for a typical
the condition
line
of the center of rotation varies greatly
and is not always located between
centers of gravity.
which
that is, the center of rotation
away from the parachute
spection
For every
=90
This
degrees,
is approx-
calculated using equaappears to be co-
degrees for those cases
) crosses 900 sometime during the trajectory do vary
from 0.032 to 0.282.
Inspection
26
of the tabulated
values of
cOm
r. in Table II indicates
some dependence
on parachute
by equation (9).
opening time which is not predicted
This
dependence occurs in those cases where the parachute opening
time is longer than the optimum opening time for a given para-
chute-cargo line length, and where there is not a well-defined
oscilla t ion.
damping ratios were cal-
Also, during the investigation,
culated,
again assuming a fixed center of rotation,
computer-derived values of
are
tabulated
0 oftlcc ~
Sclc.in
as
h
at
- 90
II.
Table
.
but using
These damping ratios
Inspection
of the
values
also tabulated in Table II shows poorer agreement.
The average value of the ratio was 1.14 with a variation
0.85
to 1.71.
accurately
from
Thus, it appears that the only fair ability to
calculate
the damping ratio of
results mainly from the inapornpriateness
an airdrop system
of the asstmption.
that the airdrop system rotates about a fixed axis and not
used to derive equation
from the other approximations
Relationship
Loss
Between
(7)@
Maximum System Rotation and 2Minimum Altitude
o Equilibrium
The computer results were analyzed
empirical relationships between 0
of the trajectories.
.
Figure
m.
and other
resulted
shows that, for a given parachute-cargo
for possible
simple
cariacteristics
and
from this analysis
h,
line length
the maximum
system rotation increases with decreasing parachute opening time.
At the lower values of maximum
27
system rotation (mx,
c 105
°)
it appears that the curves may be independent of the equil-
ibrium aerodynamic penetration,
of the one curve for S =81.7
5SD - that is, the lower part
falls
into the proper sequence
of changing parachute-cargo line length, L
This figure can be used; given a parachute-cargo
length,
L , and a parachute opening time, (;-
trajectory.
The value
,0,
of
altitude
GMas 1
the problem
and damping ratio to determine
loss to equilibrium
occurs.
from the altitude at which
What is now missing
is the altitude
the altitude of Gr,,
4
.
for a complete solution
Inspection
of Table II shows a wide
loss to
on the various
are the previous plots of
to
loss from the aircraft altitude to
range of values for altitude
to be more dependent
portion of the
can then be used together with
the calculated natural period
the
Zt) ; to deter-
, for the later
mine the initialcondition,
m
line
Emoy
r,,
, which
appear
initial conditions
versus
In
.)
than
this
case, there does not appear to be the desired simple empirical
relationships.
At this point, a more general
tories was considered.
Altitude loss to equilibrium wasplotted
versus maximumsystem rotation
to determine whether maximum
system rotation was a significant
trajectories.
dependence
view of the system trajec-
characteristic
The graph, shown in Figure a,
of minimum
altitude
For any given parachute-cargo
of airdrop
shows a remarkable
loss to equilibrium
on .
line length, the altitude
to equilibrium is minimum when
28
1rm.,.
is approximately
xM
loss
l131
degrees.
,, ,
The variation in the optimum
to 102 degrees,
for the different
from 98 degrees
line lengths is probably
due to the fact that the value of the minimums
are inter-
polated values rather than calculated values.
It would be
possible
to redraw reasonable-looking
points and have all the minimums
grees.
portions
curves through the data
occur
at precisely
Note that as the line length, L
of
the curves at values of ea,
degrees gradually
, decreases,
the
greater than
open up and flatten out.
sition is that the curves will
100 de-
continue
00O
A logical suppo-
this trend and even-
tually become a horizontal line, probably for the value,L-O
and that the value
for altitude
loss to equilibrium
,
would be
that calculated from point-mass considerations.
The one curve for SD= 8.77
dicates the dependence
, shown by a dashed line, in-
of altitude
loss to equilibrium
on
equilibrium aerodynamic penetration, however the minimum
altitude
loss still occurs
at a value
for EmA
of approx-
imately 100 degrees.
With the assumption
are minimum
that those trajectories
altitude-loss-to-equilibrium
with @ .- iO'
I
trajectories
for any
given line length, the data from Figure
8 were cross-plotted
to provide
opening time versus
a graph of optimum parachute
parachute-cargo line length.
10.
The extrapolation
justified
since
is well-known
acquired by
for
The results
are shown in Figure
of the line to the origin is reasonably
zero
line-length, i.e., a point-mass, it
that minimum
decelerating
altitude
the mass
29
loss to equilibrium
at as high as possible
is
values
Note that the plot may be independent
as soon as possible.
aerodynamic
of the equilibrium
considered, Figure 10 can be used as a basic
have been
sign graph by airdrop system designers.
chute opening time,(? -
dea
For a system with
r
,that will provide minimum
loss to equilibrium.
to the system designer is the mag-
Also of importance
nitude of the minimum
altitude loss to equilibrium
be attained with the given
opening
parachute
Figure
that
line length, Figure 10 gives the para-
given parachute-cargo
altitude
Within the range
and airdrop system characteristics
conditions
of initial
penetration.
Combining
time.
length and the optimum
plots again resulted in
of the line to zero parachute-cargo
Extrapolation
11.
line -
loss to equil-
line length yields a value of minimumaltitude
A good deal of additional
1.0.
ibrium of approximately
puter results would be required to determine
or is of some significance.
coincidence
data point
that will
for SD = 8.77
com-
if this is merely
The remoteness
of
the
from the line drawn through the data
figures
points for SD= 4Z.ZI is to be expected since previous
the magnitude of the altitude
show that
is a function
Thus,
rotation,
loss to equilibrium
of ·Se
it is
seen
that
the value of the maximum system
e,,, is a powerful criterion
for the determination
of whether an airdrop system with a given parachute-cargo
length is operating
or not.
at minimum
If i)a¢ is not within
altitude
loss to equilibrium
a few degrees of lo0
then the airdrop system is taking more altitude
30
line
degrees,
to reach equilibrium
than
necessary.
If
this
is
the case, then changes in the line-
lengthor the parachute opening time or both can yield
optimum trajectory.
the
The necessity during the design of para-
chutes to insert fairly long suspension
lines, on the order of
a canopy diameter,
reliable parachute
in order to maintain
opening characteristics
and to maintain high drag coefficients
produces important practical
restrictions
chute-cargo
line length can be.
opening
time can be an easier task.
,
on how short the para-
Adjustment
of the parachute
However,
care should be
taken to insure that the method used to modify the normal parachute opening
time, e.g., staged reefing,
does not cause equa-
tion (A.1) which describes the normal opening characteristics
of solid,
derivation
flat circular
parachutes to be invalid.
of a new equation
able cases will
and recomputation
be required.
31
In that case,
of the applic-
CONCLUSIONS
1.
The later portion
of an airdrop trajectory,
is that portion of the trajectory
its maximum
rotation
that
after the system has attained
from the horizontal,
within reasonable accuracy by a linear,
can he
described
second-order differ-
ential
equation
ith constant coefficients.
2.
An expression
oscillations
for the natural
durin, the later
ortion of the trajectory
be derived in terms of the physical
systems
13, o
and yields
period of the cargo
values which
,
characteristics
on the ave rage
can
of airdrop
are within
the values obtained from the more exact comnuter solu-
tions .
3.
An approximate
expression
for the damping ratio
of the cargo oscillat ions during the
trajectory
ate r portion of the
can be derived in terms of the physical
istics of airdrop systems and
average,are within 2
the approximate
ields values which, on the
of the values
exact computer solutions.
damping
character-
obtained
from the more
However, in an individual
ratio may vary from 52% to
case,
129% of
the value obtained from the computer.
4.
The major reason for the large variation
tween the approximate
computer solutions
damping ratios
be-
and those obtainedfrom
is the inappropriateness
of the assumption
that the airdrop system rotates about a fixed axis.
5.
system
For any airdrop system,
rotation
the value of the
that occurs during the trajectory
32
maximum
is a unique
criterion for determining whether the resulting altitude
loss to equilibrium
is the minimum
titude loss to equilibrium
rotation,
Mai
,
,,,
When
possible.
occurs when
is within
the maximum system
a few degrees of 100
is less than or greater than ln
resulting
altitude
Minimum al-
loss to equilibrium
degrees.
degrees, the
is greater than nec-
ess ary.
6.
Maximum system rotation,
al
,
is affected pri-
marily by parachute-cargo line length and parachute opening
t ime.
7.
Within the range of variables
thesis,
the values of non-dimensional
length,
L
(?i-T,
brium
)p.t
considered in this
parachute-cargo
line
, and non-dimensional parachute opening time,
that result in minimum altitude loss to equili-
are related by the expression:
33
L
=
0.645(2-
2')oF.
APPENDIX
A
Eq uations of Motion for Two-Body Airdrop
System
The airdrop system model used as a basis for the equations of motion is shown below:
D.
X
A number of assumptions were made in order to yield tractable solutions.
1.
The major assumptions were:
The airdrop method chosen is
recovery parachute.
In this method, the reefed recovery para-
chute is used to extract
the cargo from the aircraft.
the cargo clears the aircraft,
the
parachute
that of extraction-by-
the reefing line is severed and
is allowed to inflate.
Zero time coincides with
the instant that the cargo leaves the aircraft
34
After
and the parachute
begins inflating from its reefed condition.
2.
The only aerodynamic forces acting on the para-
chute and cargo are drag forces.
3.
The parachute
and cargo drag coefficients are
independent of their respective angles of attack.
4.
The elastic line joining the parachute and cargo
has a spring constant, k
5.
The parachute
.
center
of gravity
is located
at a
fixed distance from its skirt regardless of the change in parachute shape as it opens.
6.
The air density remains constant throughout the
tra e ctory.
7.
The variation in parachute area, 5p
, is a
function of time only and is described by the following equation:
[.020 + . 0034( 118.4) f
(A.1)
This equation is essentially
1
that derived experimentally by
Berndt and De Weese8 for a solid, flat circular canopy in its
latter
stages of opening, i.e.,from Z-= 0.3
to
=1.0
The constant, 0.0020, in the above equation differs from the
constant, 0.0117, in Berndt and De Weese's equation in order
to take into account the fact that equation (A.1) was used
throughout the opening process, i.e., from
-1.0
.
/
- O
to
This was done to simplify the computer solution,
but is not unreasonable since the reefed parachute shape is
close to the shape assumed by Berndt and De Weest for the
beginning of the "terminal filling period".
35
8.
From case to case, the variation in parachute
filling time is inversely proportional
to the initial cargo
velocity.
9.
Throughout
the opening process, the shape of
the parachute is represented by an inverted conical frustum
topped by an oblate hemispheroid.
10.
throughout
value
is
The parachute drag coefficient is constant
the opening process and was chosen to be 0.7.
a compromise
that
attempts
to take into account the
variation in drag coefficient with velocity.
The non-dimensionalized
equations of motion are as
follows:
=
(A.2)
(A.3)
(A.4)
(A.6)
SapSl
VX
a
(
m ( )S
_
a
=
Ml
osA ( y)/sin?
(A.7)
(A.8)
V Cs
36
This
(A.9)
=
Coso
(A.1)
=
SLno
(A.11)
_
n
I
-
V 51ri (t,
(A. 12)
=
(A.13)
-±V,
SLixK
+
-L
}
where:
Mc
Er) +
acv
In order to non-dimensionalize
the above equations:
a.
All lengths or distances were divided by SD
Th us X
c
b.
All areas were divided by Sp
c.
Velocities were divided by Ve
Ve = VItI c
d.
Masses were divided by
e.
non-dimensional time, 2-
37
, where
3Se
3
SD
,
= Vt/S
-
a:
Cl I
31
jI
I IC
CCC
C
: j
V, I
CI
C,(N~~~~~~~~~~~~~~~~~~~~,
'>C% C
___ _ _
_
I
cc
oc
_
c
V
¢ or,
C
0
C
3 d
L
C
C..
r-4
N
4J
0
I4
........
1
4
-L
r-
a:
co
4
C1
CC
C
-4
ci
N I- .
N
CN
N
r-
9i
-
.C-'
J',
-
c
c
--
-
-
i
C
,
c
N.
4
-4
-
C
w4
-r1
C cCCc
c
-
c CCC.
C
sc
iCc
t Cc
_ C_____CC
J
..
e
a_
'O
_
__
.......
___C, _C
_,
34
.......
i
ECa~'-
1
Vi
.......
C
c
c
_, .,
i1
I
tI
1
>p~~C4 N
(N
i
,,
~~~~C
...
,,
C"4
C'
1ii
(N
(
NlN
,~
a.
I
C")
iiii
_
C'4
....
CC
C
C, C"
CN
C(N :
C
C
d( (N
~pl(N))(
,
-J
UV)
__
-
-_
-r-
41)
aJ
I:$
*-4
q~J
-
uT
q
C
;
o~l
CCo
or uc _CC-
C
C
->vE,
_CC
I
.
I
.....
r.
__
L
C___
0
C
II
I
C
C4
f¢
I
'
4)
9-4
ct
HJ
C
C
-~
v.
,
i
..
.-
C
-
Gc
c
*
CN C;r
b
C",v a
^
CzC
cs t.
A3ul
C
C<
C",..
C
c
C
,
I
..
N
C
__ '
CN
c
a>
C,
Ci
...
C
I
C
c
;
,
.
,
-d
_
__
1<04~~~~~~
-
_____
_
_
__
____
__
_
H1
4>0
C
Q2
_
tr
"C
r-
3^
o
0rc
O
c
---
-
-
C
ct:
-I
C
dl
c-
2
rzl
r-
9-'
O'
'4
4
CI
11
c 1
C'
-3
c'r"
tY
o'
C
I
I
I
I
ciI
I
tr
cI
I
II
I
cr
9-4
Cl.
I
I
r-
C~
:F
pc
C
3 4.
Pcr
Pll
cC
c
C
cc
o=
c
C
C
c
c
V-
Cy
'IC
I
'C
C",
C"l
-.
C'
I-'
C
F9-4
U-
t-4.
C,
'-4
-4
rg.c
F-
Lr
I
r-
-4;
Cr
4,
e-
cl,
C..
-
(r
r--
Lr
cc
C';
I
-<1
Ce
I-
9
-f..
9C
r-
I
C
C.
C'-
-41
li
f-
C
r-
9-
I
-3
I
I
I
C
q
Cr
9-
V-
r-
-C
C'
Cl
Cf
C'
c'
r
tr
C
V
Cy
U
C'
c
C
c
C
I
I
I
I
cc.
I"
I
Lr
-4z
c:
-Z
V
I
C'
C,
%4
el,
q
It
%C
4.
4.,
tr
Lf
Ir
e-
C
i
I
C
Un
c
S
IL
cr--
-rICI:
1
I
c
I
el
rf~
U
f
u
4'L~
3
c
I-
el
I
Cc
C
I
f,I
%I
C
C
0
-4
C-
ci
C
-a
r
C,
i
rl
E
(D
-I
r
A
q
Ic
o
0¢i
1
C
c
C
C
if
C
c0
'h
0
C
r
o
I
4.
I
C-
Re 1
a
o
C
a)
-
C-
c
r
'C
0
Li
r
r
c
u
a
c
-4
r
c
I,
C
c
c
C
C
c
c
0
c
c
C:
L
c
c
C
9
'I
c
4
'4
U
r
C
Ic
r
C
C
I
I
c
0
I
¢
I
c
c
V-
4
I
_c
c
c
c
c
c
.C c
!C_
1
u
C.
C:
N
C-
¢:
4
c
r
O;
IQ
c
C
4
-4
-4
oc
rl-
I
0%IC
V
C
I
'-I
P-4
E-
I
r
I
C
c
r
C
C
I
r
C
C
C
r
Cu
¢
I
CE
0
-.
-I
C
4
P
4
0
Cu
U,
Dci
c
co
C
C
c:
C
I
C
C
1.
ru
I
r
r
C
IL
L
C
.c
c:
c
05-'
- I
F
I
t
-4
rc
a
c
C'
aC
o
C
C
C'
II
I
04
4.-4
c
C
a
il
I
-4
.
C
a
C-
p.
L
C
--a
U
p
cc
-i
4
-
I
|-
I
m
m-
I
i_
~m
P
w
|
|
I
-
i49
4
I
I
Ml
t-
-
j
_
-
1-4
ON
I I I
c
I
c
-.4
-
I '1
4
"-4
U-'
t.
CO
c.
-;
-4
--rl3
v
v
-
rl
b
-
CL
CL
·
·
-
-
-
cl-
i
-
V.
I
I
145
I
Ct'
-
c
~
IE
~
trh
_ !_
-
C
-
(-
U,
-
-
r-
cc
I
~-4
-4
r-4
9
I,-4
1.4
-4I
t-4
4
-
I
It
v,,
C
*(
C
K
M
It'
i
vt,
N
N
rl_
4 cl
1
r
1-4
C
A, r-
(N
,_
I
C9-
.
M
I
ON
'
-4-
C-4
,
Is
FIrn
1-
N
Io
40_
N
C1
~4
9-4
K
I
I
C.
I
Ct'
.
f
l.0
I
C
Vt
CIe
-4*
*
-4-
rl,
C
CI
C
CTd
-
WI
-I
.
M
Fe.
I
-
(N _/
*
4
'
-.-4
I
oN]
C.
C
-
c
-t*1
ifz
-w
4
- ri
Cb
-
,_
NI-
,
q
-4-4
-4
o-s
C- -_Co
I
r-4
F9-4
-
-
ItC-
I
I
-4-
I
-
ON
Ur
cc
-
Ct
Ct_
V-4
1-4
I
-
tI
c~~~~~i
9-
-.
(v
C'
Is
_N
~~~t - ~~~~~~~j·i
g
*
4~~~~
4
., cli
(9-
_
-4
P-4
t_1
4
v4
I
9-4
-4
e--
-
-
en
.
9-4
'.1
I
,,Or
-4
e
-
·
IjC
~Z
13
C
-.-
9-4
t1
9-4
C
P-4
f-4-
-
$~~~I
,
I
i-
V-4
e
-
F-
r-
F -|
m
E
-
%CC
r(
cc
1-4
-4
I
-
ON
K (N
-
C
ON
-;4-4
1-4
c
c
-
CN
C-4
-
ocD; A
C CV
C
-
0v
c
-4
-
I
I
Co
'I
E
,.,.
m"
(N
-
'-C
ON
c
'-q
C
I
I
__
-
It'
I
-
I
CI
o
o
C'
_-4
r-
'0
4
(N-
r.el
9-4
-
c·
c·
9-4
(N
·
-
S::
C 0
i
IN4
] O16 .O In
.n
a
C
IE
En
-
_ _0.
.
_. __,
4
* .
*
aGC
._
i
CM0
.
N
C0
,
* .t'O
*-
C.
NOC
4-
....
9
0
0
Ct
C,
-,4
-4
0
it'I*
IrcJt
N
It
N
c4
.
PS-U
·
f4-.
Xi
.t
Ct'.
Cy
Ln
oc.
<
O C
. oC
-
1V
r4
<-,
)4r
I
I
,.
r
I
I
I
I
N
Vt'
S
it *
.
C
Cn
P
%
N.
. ..
rq
"
C
C
"4
e
-
4
t,~~~~~~~~~~~~~~~~~~~~~,
_'
C _.
<
v
9-4
C944
-M
. *
C:
N
¢.
.
CON
C
,0
(
o
C
E-i
.
I
C
N
D
Cq
Ie
-4
Cc
II
I
V-4
-44
.0
eq
-4
it
(N~
OI It
I
s
-4 At oC
1-4
r
(N
NCt
C<
<
_ .<t
_
v-
eq
_
C
N C
(N
(N
C
-r-
-
N
4 N*
-
rO
CO
CC
CN
,i,
Ii
N
1-,
C
C
ON ON
Ct'
0:
N
(N4 r-
N
_1-4
(
t4
I
I
c
C·
',
'C
C
N
1-
vD. s ·
.
· tu·
' tC
M_< 6J
MI
-M
N·
C"1
N(
ur.
4
V-4
ON,
C
>
.
c
C..I {4-'
C4
,.
C
~
-#
t
*
M
-
ON
O'.0
PI
00
(N
t _ __ ,
_ __
' a'C
O
6C
CC
cC` "
CY
)
-- c
CC
'
V~l
;I '
CY)_
u\
cI
I
.
.. 1
~ 4.
.
.- C
H tU
X
c-I
.
Q
4,
I
J·
· s rs·
<-.
r
c-4
.
r-4
..Cc-II
..,
r·4
c'--I9
cc~
9
.0- .
t
-5
...
_
c
a
'
-
I
I
rl
.
en
V-
c-I
_
.
c-
..1
c-4
...
1-
v-4
.
, '
3-4I
1 4
c-
c-4
c.9
c
.
.
'
4
C,
..
_
C
Y
41
.i-4
'l
4
'
.
._
\9-4
6 9Q
.9 -
c-
(
__
.
'
·
-
r
I
w-44
r tI
_4_r
C
c
-
*
_
r
C,
C
1 -4
O
.C'
r
cI
3-4
¢ 1
-L
cuc
C
C
'
C dV
r- I
cr
d C C'
C c
r-
C
a
Ct
a'
oa'.
IL
r a
oC
'
- .,
c
-
0
v-IC cu-I
. * r
c
_
r- r-4 %
cin
p
4.)
- * -c.
N.
aoI
c.. .
r-4 V- c_.I _
~'
a'
ND
C-f
*
N
oM
.(-C
uC
C
_
C
a
L
c 00
00
C
U
.
cc
C.r
I
-4. % C
c.
.. o C
'
IVI
T
C
(C
av-4
-.
.
___4
I
...
';
4"'
C
JC
C "
C
'.
COC
C
a - "a
a'
%
3.
r -..
sa4 m*
*
E
a'4
a'a
w o
"'
.w
* *
<
u
0
.
*
(1) (c-DI~C4 l
v
_
C
C
c
FI
I
(N C
C
~vlil
C
C
"I
"1
t(
N
(N
-
c-
_~
_~
___~
C"
)
N
P"
".
_
C
-
-
ci
_t
v?
,
C_ (N9*.. (N
N
t1,
v
(N
C
r- oc
C
U-'
'C
C
-q
.
(N
~~I
-
n
N-
.)
C
C.)
-
0
0
C
E-v
a'
I
'
;i
0' 1' C-
-4-
N·
-~
a
I
c-I cc-I
v-
4
4
-
CN
r
CNC
c-
_
m
<
...'.'
(N
(N_
\61
CC,
6~7
~31
Ci
cI
.4
C")4
-
c(
:
,u-4 cc-
cC
cc
C-
·_
C
C
_u
*;r . *0 L4
uS
.
C
d
_5V
_9~
c-ICC-I
ac
-4
U
CI
L.
N
.u'
c~In
*
CC
L
C ;fO
C _-u
cC I
*o
e
(N C N")
(C
CCI1
N·
.
I
C
(3C(
C
C
I
I
33~~~~~~~~~~~~~~~
C):
Jj 1 1
0
Y~~~~~~~
el
I
I;~
a~i
~l
Ln
uI
oc1
I
CI ~
tl
al
C:
I:
,
C_
(
(f
'
.
fn
eq
Vu)
C
~~. u"~1~- u~
e.
.
cc
.
.
c
u'"
b
I
C
cc,
ONt
®
(U
cc
C
M,CO
" ,
C
C
cC
C
c, ,
.
6~~~~~~~~~~~~~~~c
r-l
CC
,,- C
6
04
r
cc C C
'c-,
rC
M(
PC:~~~~~~~~~~~~~~~~C
91
C.
-¢
-,
4cj
i
<
c
I
,
,,
-
<
Ij
f
e
csI f J~~~~~~~~~~~~~~~~~~~cl
'¢,W~~~~%
--
00
'
'
ee {
l
'J
cc"
i
'r '
St
a0c;
a)
U
a)
6
r,
C14
M-14
CI,,
--__ 0
C
0
O
.O.I(N
ON
~4
I
C",
ON
-T
CN
r
(N
U' S
\CCOC\S
aG
(U
V
0
.-4
-e
-L
n (N
C
O
-Ci ''
'C ' 4
-.
ll
..
-
-
1-4
(U
a
4)
r-4
.0
U
~~
_
'00 (N
(N
1NC C.-
cc· fl- I
e*
* 'j
I
(N1
eq
'-4
r~
u-~~ C 51 ~C
1`, *
u'"
- C CC*N C
C)
r-4
c,N C NI
CC
C
%.t
.C
C
(N
'. C11
.4
'
en
' -4 N
C)
Ln -
C~~~~~~~
5U )
I
-1
2 *N
~(N
.t4
C
C4
C~
14
-4*C r-4
'O
ITcC-
u'
-4
'-
M
-.
4
0a7)
.
-7
0-4>
4-4
4C4-4
I4
I
'4
JV]-C
F-4
r-
N
j1~
I
·
1
S~~~~~~~~~S
,-_
4·
-4
(
·.
-,T
·
u--4
,-
C a'
S(`
C5
c
I
f
I
cc
r-,-~
~~~
ON
)i
N
:~
N-
~·-
C.
(N
-~~~
C, (C
~·4
0
-4
C
c0
04
I
~~
C
·--
·
4 01
N
-4 ,,...4
01
4*4
r,,,.,
e)
;
a)
0
r-4
:>o
44
)
4 1-It
-
.
,u
-
-
'¼
....
Q)
-N
(N
c
C
c
-4.
-
N
~
C
C ,"~
~
C N
'.t
N-
44 -4U
Cz
(N
s.4J
(N
(N7
-
.4
-r,(
41
,
.4~ .4
-
(N
4-4
r-
-4
C'iC
C
c
e4
(N
e
~
C
'C
'",,
"'
C
6.
-
J
(Nl
U4
(N
1
.0
C
c
(N
ir
~
'.0
.s
Nl
r(N
(N
(N
~
C
(N
r,,
.N4 ...
-..
4
(5
4 -4
(N
(N4
14
'
61
-4,45 Q .4
C
-
~ (N IPI (N
r
C
,r ,u.R43
I~C
-4
(N
VI
4l
-
-
',u
1- -o
C4
LUcU
.4
tU
Ai
0)
k4
c
',0
6
V
rl-
N-
4.4
0
G
U,
a)
-4
:>
,-4
415)
.1
HORIZONTAL
DISTANCE -FT
?0
0
100
200
L.
I
0
30C
-4
400
w
<i
500
600
7na
VV
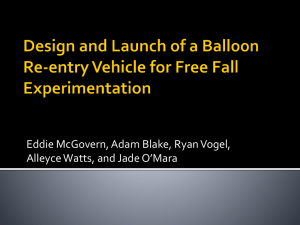
Figure 1 - Comparison of Calculated
Measured Cargo Trajectories
46
and
28
2
O
24
I
Do
20
__
LL
()
12
8
-
4
0
(
1.0
20
3.0
4.0
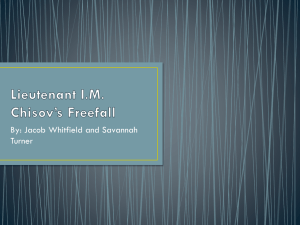
PARACHUTE -CARGO LINE LENGTHFigure 2 - Variation of Altitude Loss to Equilibrium
with Parachute-Cargo Line Length
47
5.0
L
-
24
ml
I
20
S~
D
Lj
16
C3·
0.I
0
0
LzJ
t-4S
12
8
4
ri
0
2
4
PARACHUTE OPENING
,.
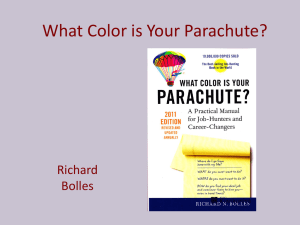
Figure
3
....
8
TIME
-( -?)
- Variation of Altitude Loss to Equilibrium
with Parachute
Opening Time
48
10
O
1
LL)
0-
0
-L
-4
4c-I )
0r
Gi
EO
LU
II
C3
O
tDZ
UJ
0O
d
O
l
0
I
ow
(-n
O
C
CNI
0
I
NOI~O
el' UID0O13]lVNOl1kiO
57-
I
j
0
4r;lWt
i C,,,
F
PARACHUTE
C.G.
F
- V sitnXp
1
CENTER OF ROTATION
STEM CG.
;0 C.G.
V sn c,
Figure 5 - Diagram of Airdrop System
Rotation about a Fixed Center
.50
LIJ
ca,
C 4
Z
C
4.J.4
I:m
r4I
C)
*-4
oc
f~
E-4
NC
S33'N3a lre -n31
",
o0
0
.5i
t43
0
M.4
AIZO'13A OWe
0
NOtIVIO4 WILSAS
.
%n
NI~
"dds - V3,IV
.
,
..
1-vimozfl-w-H
0
3nH viVd
in
c~
O
Lu
Cjr
n
i
Q4
4)
U 4
o<
oo 40
.4r
U
__
AO
331N33D
A
00
no
-A
D
I
%
II
4J
NO
LLI
to
LU-
(D
Z
LL.I
..cj
4-i
co0
.
= 0
4 p
m t
so 0
3j
-e_
C,4 CY
CL
C)
S3383G-'5(
IA
0con
(".II
0
00o
C)~
OC
or
aZ
Q)i
28
__
--
//6
//z60
2
2
/
I
20
L
2.69
?T/
:D
19
59
ci
0
0
LU
OX
29
14
C/I
V)
0
8
- L .O
48(
LLJ
s
__.s5
H
H
I--
Lt 3.32
12
C)
0
0
4
.-j
n
II
_I
8)
8(
I
I
90
100
_
I
110
MAXIMUM SYSTEM ROTATINFigure 9 -
!
120
l MAX.
- DEGREES
Variation of Altitude Loss to Equilibrium
with Maximum System Rotation
54
130
-7
i
r
10
II
:r_
i
LJ
I
5
4
r.f -
r)
-- 0
3
=)
2
/
a_
/0
I
nv
/,
0
,......
2
I,I
4
t
G
8
PARACHUTE OPENING TIME- (,-:;)
FOR MINIMUM ALTITUDE LOSS
Figure 10 - Variation of OptimumParachute Opening
Time with Parachute--Cargo Line Length
55
10
a
v
2
24
t)
IN
D 20
-
LU
12
V)
-
8
4-
/
/
/
/
ED
:E
0
0
I_
I
I
2
___
I
I
3
4-
L
5
PARACHUTE- CARGO L IME LE NGTH- L
7
_
_
Loss to
with Parachute-Cargo Line Length
Figure 11 - Variation of MinimumAltitude
Equilibrium
56
REFERENCES
1.
Patterson, A.G. and Foster, J.E.: Low Altitude Air Delivery
Development of Equations of Motion. AAI Corp. Report
No. ER-4350,
April, 1966.
2.
Foster, J.E. and Jezek, B.W.: Preliminary Investigation
of Low Altitude Airdrop Exploratory Development Extraction by Recovery Parachutes, AAI Corp. Technical
Report, August, 1966.
3.
Neustadt, M., Ericksen, R.E.: Guiteras, J.J.,
and Larrivee,
J,.A.: A Parachute Recovery System Dynamic Analysis.
ATAA Paper No. 66-25, January, 1966.
4.
Ku, Y.H.: Analysis and Control of Non-Linear Systems,
Ronald Press, New York, 1958.
5.
Sears, F.W.: Mechanics, Heat, and Sound, Addison-Wesley
Press, Inc., Cambridge, Mass. , 1950.
6.
Anon: Performance of and Design Criteria for Deployable
Aerodynamic Decelerators, Air Force System Command
Technical Report No. ASD-TR-61-579, December, 1963.
7.
Heinrich, H.G. and Rust, L.W., Jr.:
Lecture Notes from
University of Minnesota Parachute Engineering and Retardation Summer Course, Chapter II, Trajectories,
July 17-28, 1961.
8.
Berndt, R.J. and De Weese, J.H.: Filling Time Prediction
Approach for Solid Cloth Type Parachute Canopies, AIAA
Aerodynamic Deceleration Systems Conference, Houston,
Texas, Sept. 7-9, 1966.
57