Jack Symmetric Functions and the Non-Orientability of Rooted Maps Michael La Croix
advertisement

Jack Symmetric Functions
and the
Non-Orientability of Rooted Maps
Michael La Croix
University of Waterloo
January 4, 2012
Graphs, Surfaces, and Maps
Example
Definition
A surface is a compact 2-manifold
without boundary.
Definition
A graph is a finite set of vertices
together with a finite set of edges,
such that each edge is associated
with either one or two vertices.
Definition
A map is a 2-cell embedding of a
graph in a surface.
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
1 / 11
Graphs, Surfaces, and Maps
Example
Definition
A surface is a compact 2-manifold
without boundary.
Definition
A graph is a finite set of vertices
together with a finite set of edges,
such that each edge is associated
with either one or two vertices.
Definition
A map is a 2-cell embedding of a
graph in a surface.
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
1 / 11
Graphs, Surfaces, and Maps
Example
Definition
A surface is a compact 2-manifold
without boundary.
Definition
A graph is a finite set of vertices
together with a finite set of edges,
such that each edge is associated
with either one or two vertices.
Definition
A map is a 2-cell embedding of a
graph in a surface.
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
1 / 11
Ribbon Graphs and Flags
Example
Definition
The neighbourhood of the graph
determines a ribbon graph, and the
boundaries of ribbons determine
flags.
Definition
Automorphisms permute flags, and
a rooted map is a map together
with a distinguished orbit of flags.
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
1 / 11
Ribbon Graphs and Flags
Example
Definition
The neighbourhood of the graph
determines a ribbon graph, and the
boundaries of ribbons determine
flags.
Definition
Automorphisms permute flags, and
a rooted map is a map together
with a distinguished orbit of flags.
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
1 / 11
Ribbon Graphs and Flags
Example
Definition
The neighbourhood of the graph
determines a ribbon graph, and the
boundaries of ribbons determine
flags.
Definition
Automorphisms permute flags, and
a rooted map is a map together
with a distinguished orbit of flags.
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
1 / 11
Ribbon Graphs and Flags
Example
Definition
The neighbourhood of the graph
determines a ribbon graph, and the
boundaries of ribbons determine
flags.
Definition
Automorphisms permute flags, and
a rooted map is a map together
with a distinguished orbit of flags.
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
1 / 11
Rooted Maps
Example
Definition
The neighbourhood of the graph
determines a ribbon graph, and the
boundaries of ribbons determine
flags.
Definition
Automorphisms permute flags, and
a rooted map is a map together
with a distinguished orbit of flags.
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
1 / 11
Rooted Maps
Example
Definition
The neighbourhood of the graph
determines a ribbon graph, and the
boundaries of ribbons determine
flags.
Definition
Automorphisms permute flags, and
a rooted map is a map together
with a distinguished orbit of flags.
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
1 / 11
Rooted Maps
Example
Definition
The neighbourhood of the graph
determines a ribbon graph, and the
boundaries of ribbons determine
flags.
Definition
Automorphisms permute flags, and
a rooted map is a map together
with a distinguished orbit of flags.
Note
The map with no edges,
rooting.
Michael La Croix (University of Waterloo)
, has a
The Jack Parameter and non-orientability
January 4, 2012
1 / 11
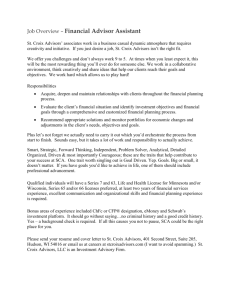
A Combinatorial Encoding of Maps
Equivalence classes can be encoded by perfect matchings of flags.
Start with a ribbon graph.
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
2 / 11
A Combinatorial Encoding of Maps
Equivalence classes can be encoded by perfect matchings of flags.
Start with a ribbon graph.
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
2 / 11
A Combinatorial Encoding of Maps
Equivalence classes can be encoded by perfect matchings of flags.
Mv
Me
Mf
Ribbon boundaries determine 3 perfect matchings of flags.
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
2 / 11
A Combinatorial Encoding of Maps
Equivalence classes can be encoded by perfect matchings of flags.
Mv
Me
Pairs of matchings determine, faces,
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
2 / 11
A Combinatorial Encoding of Maps
Equivalence classes can be encoded by perfect matchings of flags.
Mv
Mf
Pairs of matchings determine, faces, edges,
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
2 / 11
A Combinatorial Encoding of Maps
Equivalence classes can be encoded by perfect matchings of flags.
Me
Mf
Pairs of matchings determine, faces, edges, and vertices.
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
2 / 11
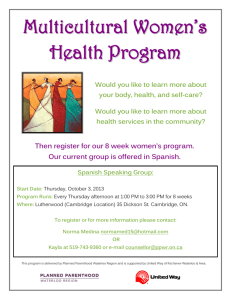
A Combinatorial Encoding of Maps
Mv
6’ 5 5’
6
7’
7
8’ 8
3’
3
2 2’
1
1’
Me
4’
4
Mf
Mv = {1, 3}, {10 , 30 }, {2, 5}, {20 , 50 }, {4, 80 }, {40 , 8}, {6, 7}, {60 , 70 }
Me = {1, 20 }, {10 , 4}, {2, 30 }, {3, 40 }, {5, 60 }, {50 , 8}, {6, 70 }, {7, 80 }
Mf = {1, 10 }, {2, 20 }, {3, 30 }, {4, 40 }, {5, 50 }, {6, 60 }, {7, 70 }, {8, 80 }
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
2 / 11
Hypermaps
Generalizing the combinatorial encoding, an arbitrary triple of perfect
matchings determines a hypermap when the triple induces a connected
graph, with cycles of Me ∪ Mf , Me ∪ Mv , and Mv ∪ Mf determining
vertices, hyperfaces, and hyperedges. Example
Hypermaps both specialize and generalize maps.
Example
,→
Hypermaps can be represented as face-bipartite maps.
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
3 / 11
Hypermaps
Generalizing the combinatorial encoding, an arbitrary triple of perfect
matchings determines a hypermap when the triple induces a connected
graph, with cycles of Me ∪ Mf , Me ∪ Mv , and Mv ∪ Mf determining
vertices, hyperfaces, and hyperedges. Example
Hypermaps both specialize and generalize maps.
Example
,→
Maps can be represented as hypermaps with = [2n ].
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
3 / 11
The Hypermap Series
Definition
The hypermap series for a set H of hypermaps is the combinatorial sum
X
H(x, y, z) :=
xν(h) yφ(h) z(h)
h∈H
where ν(h), φ(h), and (h) are the vertex-, hyperface-, and hyperedgedegree partitions of h. Example
Example
Rootings of
Michael La Croix (University of Waterloo)
contribute 12 x32 x23 (yy3 y4 y5 ) z26 to the sum.
The Jack Parameter and non-orientability
January 4, 2012
4 / 11
The Hypermap Series
Definition
The hypermap series for a set H of hypermaps is the combinatorial sum
X
H(x, y, z) :=
xν(h) yφ(h) z(h)
h∈H
where ν(h), φ(h), and (h) are the vertex-, hyperface-, and hyperedgedegree partitions of h. Example
Example
Rootings of
Michael La Croix (University of Waterloo)
contribute 12 x32 x23 (yy3 y4 y5 ) z26 to the sum.
The Jack Parameter and non-orientability
January 4, 2012
4 / 11
Explicit Formulae
The hypermap series can be computed explicitly when H consists of
orientable hypermaps or all hypermaps. sketch
Theorem (Jackson and Visentin - 1990)
When H is the set of orientable hypermaps,
HO
∂
p(x), p(y), p(z); 0 = t ln
∂t
X
θ∈P
encoding details
!
Hθ sθ (x)sθ (y)sθ (z) t=0.
Theorem (Goulden and Jackson - 1996)
When H is the set of all hypermaps (orientable and non-orientable),
!
X 1
∂
HA p(x), p(y), p(z); 1 = 2t ln
Zθ (x)Zθ (y)Zθ (z) ∂t
H2θ
θ∈P
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
t=0.
January 4, 2012
5 / 11
Jack Symmetric Functions
Jack symmetric functions, Definition , are a one-parameter family, denoted
by {Jθ (α)}θ , that generalizes both Schur functions and zonal polynomials.
Proposition (Stanley - 1989)
Jack symmetric functions are related to Schur functions and zonal
polynomials by:
hJλ , Jλ i1 = Hλ2 ,
Jλ (1) = Hλ sλ ,
Jλ (2) = Zλ ,
and
hJλ , Jλ i2 = H2λ ,
where 2λ is the partition obtained from λ by multiplying each part by two.
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
6 / 11
A Generalized Series
b -Conjecture (Goulden and Jackson - 1996)
The generalized series,
H p(x), p(y), p(z); b
X Jθ (x; 1 + b)Jθ (y; 1 + b)Jθ (z; 1 + b)
∂
:= (1 + b)t ln
∂t
hJθ , Jθ i1+b
θ∈P
X X
=
cν,φ, (b)pν (x)pφ (y)p (z),
!
t=0
n≥0 ν,φ,`n
has an combinatorial
interpretation involving hypermaps. In particular
X
β(h)
cν,φ, (b) =
b
for some invariant β of rooted hypermaps.
h∈Hν,φ,
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
7 / 11
A b-Invariant
The b-Conjecture assumes that cν,φ, (b) is a polynomial, and numerical
evidence suggests that its degree is the genus of the hypermaps it
enumerates. A b-invariant must:
1
be zero for orientable hypermaps,
2
be positive for non-orientable hypermaps, and
3
depend on rooting.
Example
Rootings of precisely three
maps are enumerated by
c[4],[4],[22 ] (b) = 1 + b + 3b2 .
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
8 / 11
A b-Invariant
The b-Conjecture assumes that cν,φ, (b) is a polynomial, and numerical
evidence suggests that its degree is the genus of the hypermaps it
enumerates. A b-invariant must:
1
be zero for orientable hypermaps,
2
be positive for non-orientable hypermaps, and
3
depend on rooting.
Example
Rootings of precisely three
maps are enumerated by
c[4],[4],[22 ] (b) = 1 + b + 3b2 .
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
8 / 11
A b-Invariant
The b-Conjecture assumes that cν,φ, (b) is a polynomial, and numerical
evidence suggests that its degree is the genus of the hypermaps it
enumerates. A b-invariant must:
1
be zero for orientable hypermaps,
2
be positive for non-orientable hypermaps, and
3
depend on rooting.
Example
Rootings of precisely three
maps are enumerated by
c[4],[4],[22 ] (b) = 1 + b + 3b2 .
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
8 / 11
A b-Invariant
The b-Conjecture assumes that cν,φ, (b) is a polynomial, and numerical
evidence suggests that its degree is the genus of the hypermaps it
enumerates. A b-invariant must:
1
be zero for orientable hypermaps,
2
be positive for non-orientable hypermaps, and
3
depend on rooting.
Example
There are precisely eight
rooted maps enumerated by
c[4,4],[3,5],[24 ] (b) = 8b2 .
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
8 / 11
A b-Invariant
The b-Conjecture assumes that cν,φ, (b) is a polynomial, and numerical
evidence suggests that its degree is the genus of the hypermaps it
enumerates. A b-invariant must:
1
be zero for orientable hypermaps,
2
be positive for non-orientable hypermaps, and
3
depend on rooting.
Example
There are precisely eight
rooted maps enumerated by
c[4,4],[3,5],[24 ] (b) = 8b2 .
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
8 / 11
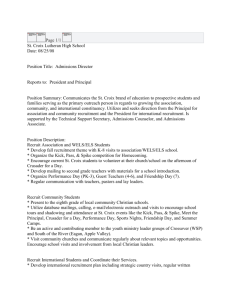
A root-edge classification
There are four possible types of root edges in a map.
Borders
Example
Bridges
A handle
Handles
Cross-Borders
Example
A cross-border
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
9 / 11
A root-edge classification
Handles occur in pairs
e
e’
Untwisted
Michael La Croix (University of Waterloo)
Twisted
The Jack Parameter and non-orientability
January 4, 2012
9 / 11
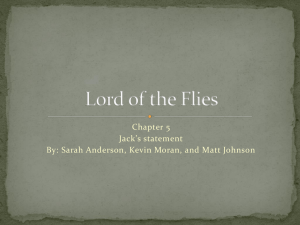
A family of invariants
The invariant η
Iteratively deleting the root edge assigns a type to each edge in a map.
An invariant, η, is given by
η(m) := (# of cross-borders) + (# of twisted handles) .
Different handle twisting determines a different invariant.
Example
Handle
Cross-Border
Border
η(m) = 2 or 1
η(m) = 1
η(m) = 0
η(m) = 1 or 2
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
10 / 11
Main result (marginal b-invariants exist)
Theorem (La Croix)
If φ partitions 2n and η is a member of the family of invariants then,
dv,φ (b) :=
X
`(ν)=v
cν,φ,[2n ] (b) =
X
bη(m) .
m∈Mv,φ
Proof (sketch).
A generating series for maps with respect η satisfies a
unique solution.
PDE
with a
The corresponding specialization of H has an analytic presentation.
Details
An algebraic refinement to distinguish between root and non-root
faces in the generating series satisfies the same PDE.
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
11 / 11
Main result (marginal b-invariants exist)
Theorem (La Croix)
If φ partitions 2n and η is a member of the family of invariants then,
dv,φ (b) :=
X
cν,φ,[2n ] (b) =
X
bη(m) .
m∈Mv,φ
`(ν)=v
Implications of the proof
dv,φ (b) is of the form
X
hv,φ,i bg−2i (1 + b)i .
0≤i≤g/2
The degree of dv,φ (b) is the genus of the maps it enumerates.
The top coefficient, hv,φ,0 , enumerates unhandled maps.
η and root-face degree are independent among maps with given φ.
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
11 / 11
The End
Thank You
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
11 / 11
Finding a partial differential equation
Root-edge type
Schematic
Contribution to M
Cross-border
z
X
(i + 1)bri+2
i≥0
Border
z
i+1
XX
rj yi−j+2
i≥0 j=1
Handle
z
X
(1 + b)jri+j+2
i,j≥0
Bridge
z
X
ri+j+2
i,j≥0
∂
M
∂ri
∂
M
∂ri
∂
M
∂ri
∂2
M
∂ri ∂yj
∂
M
∂rj
Return
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
12 / 11
Example
Mf
ν = [23 ]
= [32 ]
Mv
φ = [6]
Me
Return
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
13 / 11
Example
is enumerated by x32 x23 (y3 y4 y5 ) z26 .
ν = [23 , 32 ]
φ = [3, 4, 5]
= [26 ]
Return
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
14 / 11
Jack Symmetric Functions
With respect to the inner product defined by
hpλ (x), pµ (x)iα = δλ,µ
|λ|! `(λ)
α ,
|Cλ |
Jack symmetric functions are the unique family satisfying:
(P1) (Orthogonality) If λ 6= µ, then hJλ , Jµ iα = 0.
X
(P2) (Triangularity) Jλ =
vλµ (α)mµ , where vλµ (α) is a rational
µ4λ
function in α, and ‘4’ denotes the natural order on partitions.
(P3) (Normalization) If |λ| = n, then vλ,[1n ] (α) = n!.
Return
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
15 / 11
Encoding Orientable Maps
1
Orient and label the edges.
2
This induces labels on flags.
3
Clockwise circulations at each
vertex determine ν.
4
1
2
4
3
Face circulations are the cycles
of ν.
5
6
= (1 10 )(2 20 )(3 30 )(4 40 )(5 50 )(6 60 )
ν = (1 2 3)(10 4)(20 5)(30 50 6)(40 60 )
ν = φ = (1 4 60 30 )(10 2 5 6 40 )(20 3 50 )
Return
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
16 / 11
Encoding Orientable Maps
1
Orient and label the edges.
2
This induces labels on flags.
3
Clockwise circulations at each
vertex determine ν.
4
Face circulations are the cycles
of ν.
1
4
2
3
5
6
= (1 10 )(2 20 )(3 30 )(4 40 )(5 50 )(6 60 )
ν = (1 2 3)(10 4)(20 5)(30 50 6)(40 60 )
ν = φ = (1 4 60 30 )(10 2 5 6 40 )(20 3 50 )
Return
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
16 / 11
Encoding Orientable Maps
1’
1
Orient and label the edges.
2
This induces labels on flags.
3
Clockwise circulations at each
vertex determine ν.
4
Face circulations are the cycles
of ν.
4
2
1
2’
3
4’
6’
3’
5
5’
6
= (1 10 )(2 20 )(3 30 )(4 40 )(5 50 )(6 60 )
ν = (1 2 3)(10 4)(20 5)(30 50 6)(40 60 )
ν = φ = (1 4 60 30 )(10 2 5 6 40 )(20 3 50 )
Return
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
16 / 11
Encoding Orientable Maps
1’
1
Orient and label the edges.
2
This induces labels on flags.
3
Clockwise circulations at each
vertex determine ν.
4
Face circulations are the cycles
of ν.
4
2
1
2’
3
4’
6’
3’
5
5’
6
= (1 10 )(2 20 )(3 30 )(4 40 )(5 50 )(6 60 )
ν = (1 2 3)(10 4)(20 5)(30 50 6)(40 60 )
ν = φ = (1 4 60 30 )(10 2 5 6 40 )(20 3 50 )
Return
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
16 / 11
The Map Series
An enumerative problem associated with maps is to determine the number
of rooted maps with specified vertex- and face- degree partitions.
Definition
The map series for a set M of rooted maps is the combinatorial sum
X
M = M (x, y, z, r; b) :=
x|V (m)| yφ(m)rρ(m) z |E(m)| rρ(m) bη(m) ,
m∈M
where the sum is taken over all rooted maps, including the map with no
edges, V (m) is the vertex set of m, φ(m) is the face-degree partition of m,
ρ(m) is the degree of the root face of m, and E(m) is the edge set of m.
Return
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
17 / 11
How to enumerate maps with symmetric functions
Instead of counting rooted maps, we can count labelled hypermaps.
This adds easily computable multiplicities.
Labelled counting problems are turned into problems involving
counting factorizations.
These can be answered via character theory.
Appropriate characters appear as coefficients of symmetric functions.
The logarithms restrict to connected maps, and the differential
operators remove the decoration.
Return
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
18 / 11
How to enumerate maps with symmetric functions
Instead of counting rooted maps, we can count labelled hypermaps.
This adds easily computable multiplicities.
Labelled counting problems are turned into problems involving
counting factorizations.
These can be answered via character theory.
Appropriate characters appear as coefficients of symmetric functions.
The logarithms restrict to connected maps, and the differential
operators remove the decoration.
Return
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
18 / 11
How to enumerate maps with symmetric functions
Instead of counting rooted maps, we can count labelled hypermaps.
This adds easily computable multiplicities.
Labelled counting problems are turned into problems involving
counting factorizations.
These can be answered via character theory.
Appropriate characters appear as coefficients of symmetric functions.
The logarithms restrict to connected maps, and the differential
operators remove the decoration.
Return
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
18 / 11
How to enumerate maps with symmetric functions
Instead of counting rooted maps, we can count labelled hypermaps.
This adds easily computable multiplicities.
Labelled counting problems are turned into problems involving
counting factorizations.
These can be answered via character theory.
Appropriate characters appear as coefficients of symmetric functions.
The logarithms restrict to connected maps, and the differential
operators remove the decoration.
Return
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
18 / 11
How to enumerate maps with symmetric functions
Instead of counting rooted maps, we can count labelled hypermaps.
This adds easily computable multiplicities.
Labelled counting problems are turned into problems involving
counting factorizations.
These can be answered via character theory.
Appropriate characters appear as coefficients of symmetric functions.
The logarithms restrict to connected maps, and the differential
operators remove the decoration.
Return
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
18 / 11
A Specialization
Definition
For a function f : RN → R, define an expectation operator h·i by
Z
2
− 1 p (λ)
|V (λ)| 1+b f (λ)e 2(1+b) 2 dλ,
hf i1+b := c1+b
RN
with c1+b chosen such that h1i1+b = 1.
Theorem (Okounkov - 1997)
If N is a positive integer, 1 + b is a positive real number, and θ is an
integer partition of 2n, then
hJθ (λ, 1 + b)i1+b = Jθ (1N , 1 + b)[p[2n ] ]Jθ ,
where 1N = (1, . . . , 1, 0, 0, . . . ) consists of N leading 1’s followed by 0’s.
Return
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
19 / 11
A Specialization
Definition
For a function f : RN → R, define an expectation operator h·i by
Z
2
− 1 p (λ)
|V (λ)| 1+b f (λ)e 2(1+b) 2 dλ,
hf i1+b := c1+b
RN
with c1+b chosen such that h1i1+b = 1.
M (N, y, z, r; b) = r0 N + (1 + b)
X
j≥1
rj
D 1 P
√ kE
1
∂
ln e 1+b k≥1 k yk pk (λ) z
∂yj
1+b
Return
Michael La Croix (University of Waterloo)
The Jack Parameter and non-orientability
January 4, 2012
19 / 11
b is ubiquitous
The many lives of b
b=0
Hypermaps
Symmetric Functions
Matrix Integrals
Moduli Spaces
Matching Systems
Michael La Croix (University of Waterloo)
Orientable
sθ
Hermitian
over C
Bipartite
b=1
?
Jθ (b)
?
?
?
The Jack Parameter and non-orientability
Locally Orientable
Zθ
Real Symmetric
over R
All
January 4, 2012
20 / 11