Emily - Welcome to csit.netsal.selu.edu
advertisement

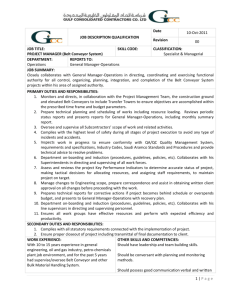
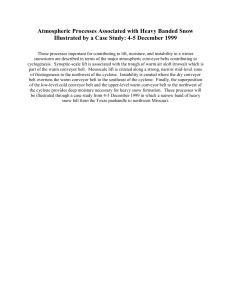
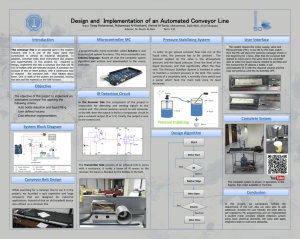
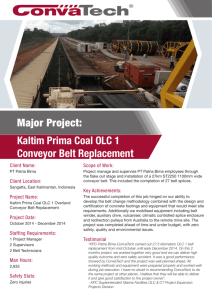
Spring 2014 Mechanical Conveyor Belt By: Emily Brown ET 494 Senior Design II Instructor: Dr. Cris Koutsougeras Advisor: Dr. Junkun Ma 1| P a g e Mechanical Engineering Southeastern Louisiana University Spring 2014 Table of Contents Abstract ............................................................................................................................................................................. 3 Purpose .............................................................................................................................................................................. 4 Methodology.................................................................................................................................................................... 5 Safety .................................................................................................................................................................................. 6 Material.............................................................................................................................................................................. 8 Conveyor 1 .................................................................................................................................................................... 10 Feed Requirements ..................................................................................................................................................... 11 Control Sequence ....................................................................................................................................................... 13 Frame ............................................................................................................................................................................. 14 Belt Selection................................................................................................................................................................ 17 Idler and Pulley............................................................................................................................................................. 20 Tension .......................................................................................................................................................................... 22 Drive............................................................................................................................................................................... 22 Motor ........................................................................................................................................................................ 23 Gear ........................................................................................................................................................................... 24 Coupling.................................................................................................................................................................... 24 Conveyor 2 .................................................................................................................................................................... 29 Feed Requirements ..................................................................................................................................................... 30 Preliminary Visual Logic ............................................................................................................................................. 31 Rough Frame Sketch................................................................................................................................................... 32 Belt Selection................................................................................................................................................................ 33 Idler and Pulley............................................................................................................................................................. 35 Tension .......................................................................................................................................................................... 36 Drive............................................................................................................................................................................... 37 Motor ........................................................................................................................................................................ 37 Gear ........................................................................................................................................................................... 39 Coupling.................................................................................................................................................................... 39 Actuator Selection ...................................................................................................................................................... 43 Excel Data ..................................................................................................................................................................... 46 References ..................................................................................................................................................................... 49 2| P a g e Abstract The aspects of this project consist of designing and aiding in the construction of two conveyor belt systems which will be implemented into a biomass plant dealing specifically with wood pellets. The both conveyor belts will consist of a drive powered by an electric motor, the frame, and the belt itself. The belt feeder belt, which is designed first, will be receiving input from the storage pile and delivering output to the boiler. The second belt will convey pellets from the mill to storage and will have the capability of changing elevation with the respect to a pivot point. Another notable portion of this analysis involves regulation of the pellets that will be disposed of in the boiler at a given time. A depiction of the entire system is shown in Figure 1. Figure 1 3| P a g e Purpose In order to correctly assimilate a conveyor belt system into a biomass plant certain design factors have to be considered. Therefore, to understand the functionality of the system, a preliminary control sequence (a broad overview) was developed to show dependent and independent tasks. After the objectification of these tasks, assessments of the requirements of each individual component were made. The sole purpose is to analyze the requirements, design the structure, the driving mechanism, belt selection, sensing/monitoring system, as well as elevation and overall frame movement. Considering the environment of fine particles that will be present throughout, extra precaution will need to be taken in the form a self-cleaning system as well as explosion proof equipment. Figure 2 shows Conveyor 1 which feeds the boiler and conveyor 2 which conveys pellets from the mill to the storage. Figure 2 4| P a g e Methodology Conveyor 1 (Feeds boiler) Research conveyor belt types and applications Research safety requirements Develop a general function layout using Visual Logics Rough frame design Optimal frame dimensions based on boiler/steam turbine intake Strength analysis (force and moment balance, bending stress, etc.) * Motor selection Design drive based on boiler/steam turbine intake rate Determine necessary gear ratio (motor : drive – torque increase and speed reduction) Belt selection Placement of idlers on the frame (tension uptake) Pellet regulation device- either before or after the conveyor Conveyor 2 (from mill to storage) Develop a general function layout using Visual Logics Rough frame design Optimal frame dimensions based on pellet mill output Strength analysis (force and moment balance, bending stress, etc.) Motor selection Design drive based on pellet feed rate Determine necessary gear ratio (motor : drive – torque increase and speed reduction) Belt selection Placement of idlers on the frame (tension uptake) Add finer details to Visual Logic Elevation sensor for changing conveyor height with respect to storage pile height Actuator selection 5| P a g e Safety Requirements The environment in which the conveyor is located is considered extremely dangerous because of the involvement of heat, dust, and moving parts. Standards have been set by organizations such as ANSI, CEMA, and OSHA. OSHA OSHA subpart: Helicopters, Hoists, Elevators, and Conveyors briefly covers areas that need attention such as breaking, warning signals, remote operation, Emergency stop switches, and procedures such as LOTO. The following information and standards were taken from the OSHA website: Part Number: Part Title: Subpart: Subpart Title: Standard Number: Title: 1926 Safety and Health Regulations for Construction N Helicopters, Hoists, Elevators, and Conveyors 1926.555 Conveyors. 1926.555(a)(1) Means for stopping the motor or engine shall be provided at the operator's station. Conveyor systems shall be equipped with an audible warning signal to be sounded immediately before starting up the conveyor. 1926.555(a)(2) If the operator's station is at a remote point, similar provisions for stopping the motor or engine shall be provided at the motor or engine location. 1926.555(a)(3) Emergency stop switches shall be arranged so that the conveyor cannot be started again until the actuating stop switch has been reset to running or "on" position. 1926.555(a)(7) Conveyors shall be locked out or otherwise rendered inoperable, and tagged out with a "Do Not Operate" tag during repairs and when operation is hazardous to employees performing maintenance work. 6| P a g e ANSI ANSI B20.1-1957, Safety Code for Conveyors, Cableways, and Related Equipment provides further details on required safety parameters and are paraphrased below from lawresource.org. 605 Backstops and Brakes: a- Guards should be in place to prevent potentially dangerous access b- Mechanically released brakes should be designed so that if the power source is interrupted and brakes are off, the descent of the load occurs at a controlled speed. In the case of electrically released breaks, the breaks do not activate until the power is applied to the motor or automatically in the scenario of power supply failure. 606 Overload Protection: Protection of electric motors, conveyor, and mechanical drive and the presence of an overload device designed to shut off electric power or disconnect conveyor or drive parts quickly. 609 Guards: Conveyors near workstations should have guards. 610 Interlocking Devices: Mechanical and Electrical devices on the conveyor system should be provided with an automatic stop in the case of feed blockage in bin, chute, hopper, etc. CEMA CEMA handbook for Belt Conveyors for Bulk Materials briefly makes note of the fact that labels are required near all moving parts. These labels can be obtained from CEMA Label Placement Guideline BH-1 which is intended solely for bulk material handling conveyors. 7| P a g e Conveyed Material Material Class Description –E45TVY The material being considered for the extreme case is pine wood. Wood particles in the extreme case can be categorized as stringy, irregular, fibrous, or sluggishly flowing. The Material Classification Code System Table uses various descriptions related to the following categories: Size, Flowability Angle of Repose, Abrasiveness, and Miscellaneous to classify materials. The code E45TVY was derived using this table based on the irregular size, sluggish material flow due to material interlocking and matting, an angle of repose greater than 40 degrees, generally nonabrasive characteristic, mildly corrosive, very fluffy and light characteristics, and the explosive dust environment. Using the Table of Flowability, it was determined that the angle of surcharge will at max be 30degrees and the angle of repose will be greater than 40-degrees. These angles will give a general depiction of the average cross sectional area of the load. Given such a high angle of repose and the average material density (38lb/ft^3), the material will have a tendency to flow 8| P a g e downward on an incline therefore it is noted that the maximum allowable inclined angle is 30 degrees. A summary of the material characteristics is shown below in Excel Table 1. Size Flowability Angle of repose Abrasiveness Miscellaneous Irregular- stringy, interlocking, mats together Sluggish-Angle of Repose > 40 Nonabrasive Very Dusty Contains Explosive Dust Interlocks or Matts Excel Table 1: Material Characteristics 9| P a g e E 4 5 L N V Conveyor 1 Pellet Trajectory Pellets in moved from storage travel through a regulation gate or filter which prevents oversized pellets from going through, this method helps to reduce irregularities in load sizes. After the pellets pass through the loading chute, they travel the span of the conveyor. Upon leaving the exit chute, the pellets are fed to boiler and ultimately fuel is derived from the use of heat energy (i.e. steam). Deliverables Conveyor 1 **This is a tentative Representation Task: Completion Date: Actual Start Actual End Control Sequence Throughout 10/5/2013 Research Safety 10/12/2013 10/12/2013 10/12/2013 Boiler & Mill Req. 10/23/2013 10/23/2013 10/23/2013 General Frame Design 10/25/2013 10/21/2013 10/21/2013 Research Standards Throughout 10/25/2013 Research Suppliers Throughout 10/26/2013 Order CEMA Handbook When received 11/12/2013 11/19/2013 Belt Selection 11/17/2013 11/15/2013 11/17/2013 Drive Calculations 11/19/2013 11/17/2013 11/19/2013 Motor Selection 11/19/2013 11/17/2013 11/19/2013 Worm Gear Selection 11/22/2013 11/19/2103 11/22/2013 Compile Calculations 11/26/2013 11/26/2013 11/26/2013 Select Coupling 12/1/2013 11/22/2013 12/3/2013 Gear and Drum Connection 12/3/2013 12/2/2013 12/3/2013 Final Frame Schematic 12/3/2013 12/3/2013 12/3/2013 Note: Completion date denotes a projected time Excel Table 2: Conveyor 1 Deliverables 10| P a g e Conveyor Requirements: Boiler/Steam Turbine After meeting with Mr. Byron and Mr. Dawson at Southeastern Louisiana University’s Sustainability Center, the starting point of this project consisted of a brief introduction to the desired capabilities of the conveyor system as a whole. As figure 2 illustrates, the job of Conveyor 1 is to displace pellets from the storage to the boiler. In the case of design, the only customer specified constraint of this conveyor is the feed rate to the Boiler/Steam Turbine; specified as System 3 (Table 1). Using the available data in Table 2, the wood type with the lowest BTU value per cord (pine) is considered as the most extreme case. A greater capacity of this type will be needed to obtain the optimal MMBTu/hr rating allotted by the Boiler/Steam Turbine. Table 1: Boiler/Steam Turbine Characteristics 11| P a g e Table2: adapted from - ttp://umaine.edu/publications/7216e/ With the required feed rate of the boiler and the minimum heat value of pine wood, a preliminary calculation of maximum capacity over unit of time was conducted to get a general idea of what type of loading is necessary. The calculations are depicted below. 12| P a g e Control Sequence The control sequence using Alerton Visual Logic for the project in its entirety is still being developed but the derived information thus far includes the sequences below: 13| P a g e Frame Design Rough Sketch: To begin the developmental phase of the frame design, a rough sketch was made (shown in Figure 1). This sketch allowed for the identification of variables that need to be designed or determined through calculation. Some of these include: belt length, incline angle, drum placement, idler placement, drive placement, input, output, and cleaning equipment. Figure 1: Rough Sketch 14| P a g e Final Schematic for Conveyor 1: Using various parameters both specified and designed throughout the project (including various maintenance clearances) the schematic shown below was developed: 15| P a g e 16| P a g e Belt Selection A variety of details were necessary for the dimensions of the belt. All of the information was obtained from either tables or calculations that were specified within the CEMA Belt Conveyors for Bulk Materials. Belt speed and Belt width Using the material characteristics, one can determine the recommended maximum belt speeds using Table 4.2. The cons of choosing a higher belt speed ultimately lead to reduced life of the belt. For simplification purposes the belt speed of 600 fpm was chosen with the range of Belt Width 24-30 in. The next unknown variable in this case is the belt width. For the ease of design in the allotted time frame, a flat belt will be selected, which means that the belt has a trough angle of 0 degrees. 17| P a g e Belt width Selection: The available data of the capacity which was calculated as 2,440 lb/min can be converted to a usable variable of capacity in tons per hour which is 73.2 tph. Using this data, an equivalent Q100 rating (capacity at 100fpm) of 770 tph at an angle of surcharge of 30 degrees allows the selection of the belt width of 24 in which is an overdesign for the purpose of safety. The method of selection is shown in Table 4.7. After the belt width is determined, the edge distance in accordance to Table 4.3 is determined to be 2.22 in. Also determined with the belt width is the skirt board width found in Table 4.10. The functionality of the skirt board is to retain sediment such as dust or debris. 18| P a g e ** In the place of these skirt boards, corrugated sidewalls will be used as a cleaning mechanism. Belt Covers The belt will be used in an environment that will require fire/ flame resistance. This factor limits the belt cover material selection to SBR, nitrite, polychloroprene (neoprene) and PVC which are routinely used in similar applications. These types of covers will prevent spreading of a fire if one does happen to occur in this potentially flammable environment. RMA Grade 2 belting was selected because of its good quality in the applications of heavy duty service. Using table 7.5, which is specific from RMA Grade 2, a minimum carry thickness (between 1/16 to 1/8 in) is chosen. 19| P a g e Again using a material property a minimum pulley cover thickness is selected. Belt connection: Belts are sold in sectional lengths; therefore a method of connection needs to be chosen. The two choices that were presented in the handbook were vulcanized or mechanically fastened. For this specific purpose, vulcanized splices were chosen because of the following advantages highlighted by CEMA: 1. It has the highest practical strength. 2. Long service life. 3. Cleanliness The cons that were noted included: costly, replacement can be time consuming, and they are generally more complex than mechanical fasteners. Again considering the environment, this seemed to be the correct choice based on the required safety measures. Idlers and Pulleys For the purpose of tension uptake, idlers are implemented. The factors that need to be considered when selecting idlers are primarily: the number of idlers required on the return and uptake side, the diameters, and the placement. Since the belt is flat, all return and carrying idlers will be flat also. Spacing: Distance between idlers on both loading and return side. 20| P a g e Belt Load: Determining the belt load requires the bulk density of the material which is specified as 38lbf/ft^3 and the belt width. Since the belt load (belt weight plus load weight) is less than 475 lbf at a belt width of 24in which is specified in Table 5.35 CEMA C idler with a diameter of 4in was selected. Table 5.1 gives a general outlook on the Classification and the size of potential idlers. 21| P a g e Pulley The most common type of pulley is the standard steel pulley which will be utilized at the drive end for the sake of simplicity. To discourage belt misalignment these pulleys are usually crowned at permissible dimensions which are defined by CEMA B105.1. On the dead shaft, which is located at the loading end, a spiral wing pulley will be used to help keep the belt aligned. The handbook used only provides minute detail about the drums; however, given that standard pulley diameters are 8, 10, 12, 14, 16, 18, 20, 24, 30, 36, 42, 48, 54, and 60 inches, the diameter of 8 inches is selected for the both the drive and the dead shaft due to the small scale size of the conveyor. Tension Conveyor systems are divided into three cases when it comes to strength analysis, specifically tension. For the purpose of this project the Basic Conveyor case was used. This type of conveyor is defined by CEMA as: A single flight of less than 800 ft in length A single free flowing load point Inclined or horizontal but without curves A belt with a fabric carcass Flat or equal roll troughing idlers A single drive Unidirectional or reversing up to 500 fpm A single gravity or fixed take up A maximum belt tension of 12,000 lbf 22| P a g e Thus far all of these basic qualifications have been met by the obtained data. It should be noted that a conservative approach was used to the calculation of tension due to the short time frame. Drive The values derived in the portion were compiled into a table located at the end of this section. Necessary parameters for the drive portion involving the pulley as well as the motor include: power, rpm, and torque. Equation 2 is used to determine the unknown values. Equation 2: Equation 3: 𝑇𝑜𝑟𝑞𝑢𝑒 (𝑙𝑏𝑓 ∗ 𝑖𝑛) = 63,000 𝑛(𝑟𝑝𝑚) = 𝑉∗60 2𝜋𝑟 𝑃𝑜𝑤𝑒𝑟 (𝐻𝑝) 𝑛(𝑟𝑝𝑚) where V= belt speed Motor: Assuming that the power calculated for the pulley is equal to the power provided by the motor a 3 phase AC explosion proof motor was selected. 23| P a g e Drive Power conveyor (hp) Pulley Speed (rpm) Conveyor Torque (lbf*ft) Power motor (hp) Motor Speed (rpm) Gear ratio Excel Table 3: Drive 7.638870707 147.13 28.55555556 10 1180 8.020118263 To ensure that the motor and the gear ratio selected equals or surpasses the torque required to drive the belt, it was necessary to back track through calculations which is shown in the table below. Given the fact that no motor is 100% efficient, power loss was accounted for when conducting the calculation. Reverse Calculation Full load efficiency Motor Power (hp) Actual power (hp) Rpm Motor Rated torque (lbf*ft) Gear ratio Pulley Torque (lb*ft) RPM Pulley Pulley Power (hp) 0.895 10 8.95 1180 39.81991525 8 318.559322 147.5 8.95 Excel Table 4: Reversed Drive Data The results of this calculation and the section of a gear ratio of 8:1 show that the motor speed of 1180 is reduced to about 147.5 rpm and the motor torque was increased at the pulley from approximately 40 lbf*ft to 319 lbf*ft which was greater than the previously calculated and surpasses requirements. 24| P a g e Gear The major reasons for selecting a worm gear are because of the high efficiency and the compact design. Common worm and worm gear materials which have been selected for this application include, steel to bronze respectively. With the calculated gear ratio of 8:1 a worm and worm gear were selected. Worm gear (steel - bronze) Pitch Diameter (in) 6 Double Threaded Gear ratio (min) 10:1 to 20:1 Quad Threaded Gear ratio (min) 4:1 to 10:1 Excel Table 5: adapted from data fromhttp://www.bostongear.com/products/open/chart-worm.htm Coupling Selection: (1010GC02 Double Engagement) To correctly select the appropriate coupling to connect the worm gear to the motor shaft an online manual supplied by Power Drive is used. The necessary parameters (as specified by the technical manual) and their corresponding values have been arranged into an Excel table which is shown below Coupling Selection Data Motor horsepower Running rpm Application or type of equipment Motor Shaft Diameter(in) Worm Gear Shaft Diameter (in) Gap Between Shafts Note 10 1180 Conveyor 0.62 Found in Motor Schematic 0.75 Found Using 8:1 Ratio (6in/8) 0.25 Assumed Excel Table 6: Coupling Selection The following schematic is used to determine the motor shaft diameter for the above Excel Table. 25| P a g e **Images adapted from Baldor Explosion Proof Motors technical Manual 1. Motor Torque Now that the specified values are known and organized, the first step is to determine the system torque which was calculated in the previous Drive section to be about 534 lb-in. 2. Service Factor Next, the service factor for the conveyor application was determined to be 1.25 considering that the conveyor is essentially a bucket conveyor. 26| P a g e Table adapted from powerdrive.com 3. Coupling Rating After the S.F. (service factor) is determined the minimum required coupling rating can be calculated by multiplying the service factor by the torque: 𝑀𝑖𝑛𝑖𝑚𝑢𝑚 𝐶𝑜𝑢𝑝𝑙𝑖𝑛𝑔 𝑅𝑎𝑡𝑖𝑛𝑔 = 667.5 𝑙𝑏 ∙ 𝑖𝑛 4. Design Hp To determine the design horsepower, the actual power is multiplied by the service factor yielding: 𝐷𝑒𝑠𝑖𝑔𝑛 𝐻𝑜𝑟𝑠𝑒𝑝𝑜𝑤𝑒𝑟 = 15ℎ𝑝 5. Type Using the shaft diameters of the worm and the motor, rated torque of the coupling, and allowable speed, type 1010GC02 was selected from the table below 27| P a g e Table adapted from powerdrive.com Figure adapted from powerdrive.com 6. Size Size is selected by using the motor speed; in this case 1180rpm which is not located on the chart but rather it is in between the two speeds of 1450 and 1170. The exact value is not necessary because the purpose is to confirm or deny the selection of the coupling is correct in the previous step. Using the maximum coupling rating of 232 and 187 one can determine that the selection of 1010G is suitable because the rated hp of the selection (15hp) is much less than these values. 28| P a g e Table adapted from powerdrive.com Worm Gear to Drive Shaft Mounting: For optimal performance and safety reason, a method of connection of the worm gear to the drive pulley of the conveyor needs to be determined. In a high dust environment, it is standard to provide a cover/guard on all moving parts. This factor means that housing should be integrated into the connection method. 29| P a g e Conveyor 2 Design Purpose: Conveyor 2 serves the purposed of relaying pellets from the pellet mill to storage. The auxiliary devices that will be incorporated within this conveyor that were not incorporated within the design of Conveyor 1 include elevation change and the implementation of a sensor. The capability of changing elevation will be a function of pellet height in storage and a method of determining pellet height is through use of a sensor. The deliverables are outlined below Time Line Conveyor 2 (Pellet Mill to Storage) **This is a tentative Representation Task: Completion Date: Actual Start Actual End Rough Frame 1/28/2014 1/25/2014 1/28/2014 Preliminary Visual Logic 1/28/2014 1/26/2014 2/1/2014 Belt Selection 2/11/2014 2/2/2014 2/10/2014 Pulley Calculations 2/18/2014 2/15/2014 2/15/2014 Drive (Gear Ratio) 2/25/2014 2/24/2014 2/25/2014 Motor Selection 3/4/2014 2/24/2014 3/10/2014 Gear Selection 3/4/2014 3/10/2014 3/10/2014 Coupling Selection 3/11/2014 3/10/2014 3/10/2014 Gear and Drum Connection 3/11/2014 3/10/2014 3/11/2014 Actuator Selection 3/18/2014 3/17/2014 3/18/2014 Strength Analysis 4/6/2014 3/30/2014 Final Frame Schematic 4/11/2014 Final Visual Logic 4/28/2014 Note: Completion date denotes a projected time Excel Table 7: Conveyor 2 Deliverables 30| P a g e Conveyor Feed Requirements: Pelt Mill The loading requirement is determined by the selected pellet mill. The electric pellet mill shown in figure below, has a 30HP motor and an output of 1,323-1,764lbs/hour , this mean that the material is pushed through the die holes at this rate. Using maximum and minimum capacity ratings, a ton per hour value is calculated as specified by the CEMA Handbook. Figure adapted from gardenheat.com 31| P a g e Visual Logic Feedback is a favorable attribute to have in any system; without feedback it becomes more difficult and, at times, impossible to monitor all components of a system for parameters like temperature, speed, elevation, tension, or any other types of output or input that is of great importance to safety as well as efficiency. An overview of the input and output are summarized in order to produce a visual logic layout. Speed Control for monitoring load DDC should check speed continuously. If speed is greater than or equal to upper limit, torque is too low. If speed is less than or equal to lower limit, then torque is too high. If either of these conditions is false, continue to loop and record torque range. If either of these conditions is true, alert user. Elevation Control Check current position via sensor. If pellet pile position is equal to initial height (4ft) (range: 3.5-4ft), time range, check elevation again, if pellet position is still greater than within range, increase elevation by 2ft. Set position as new initial position. If pellet pile position is equal to initial height (6 ft) (range: 5.5ft -6ft), time range, check elevation again, if pellet position is still within range, increase elevation by 2ft. Set position as new initial position. If pellet pile position equal to initial height (8 ft) (range: 7.5-8ft), time range, check elevation again, if pellet position is still within range, sound alert and stop conveyor. When signal received from user, decrease elevation to 4ft (reset). Else, continue. 32| P a g e Initial Frame Design With the basic information provided, a rough sketch of the frame is done to provide an illustration of the pellet trajectory and to determine other necessary factors that may need to be considered in the design of this conveyor. 33| P a g e Belt Selection The first step in determining the specific characteristics of the belt that will be used in conveyor 2 is to consider the material that will be transported. The same material will be transported in the both conveyor 1 and conveyor 2, the same material characteristics will apply to conveyor 2. Using Table 4.2 a range of recommended belt speeds are shown, an adaptation of this table is show in the Excel Table 7. Belt Characteristics (Table 4.2) Grain or Other free flowing, nonabrasive material Belt Speeds (fpm) Belt Width (in) 400 600 800 Excel Table 7: Recommended Speed 18 24-30 36-42 In order to select the appropriate width and speed the capacity at 100 fpm is calculated and Table 4.7. The maximum value is considered for extreme loading conditions and the belt speed of 400fpm is assumed for the conversion of capacity at 100fpm. Capacity Max Capacity (lb/hr) Capacity (tph) Capacity (ft^3/hr) Capacity (Q100 @ 400fpm) Min 1764 1323 0.882 0.6615 55.70526 41.77895 13.92632 10.44474 Excel Table 8: Calculating Capacity Using the maximum Q100 of 13.92632 ft3/hr and the corresponding values in Table 4.7 the information in the excel sheet is obtained. Table 4.7: Flat Belt Standard Edge Distance Surcharge 30 Max Q100 (ft^3/hr) 763 Cross Sectional Area(ft^2) 0.127 Belt Width (in) 18 Excel Table 9: Area of Material The maximum Q100 value listed on the table (763 ft3/hr) greatly surpasses the maximum calculated Q100 specific for the conveyor load, which means that the cross sectional area specified in Table 4.7 will also be greater than the actual cross sectional area (denoted in Excel Table 9). 34| P a g e Belt Load Cross Sectional Area in ft^2 Area of Trapezoid Area of Circular Segment From Equations on Page 61 Total Area Total Area based on Design Excel Table 10: Cross Sectional Area Value 0 8.364642 0.058088 0.001289 Although these values are much greater they will suffice for the design constraints given that the values are the lowest specified values for a surcharge angle of 30 degrees. Along with the selection of recommended belt speed and belt width, is the selection of standard edge distance (Table 4.3) as well as standard skirt board width (Table 4.10). Given that the belt width is determined to be 18 in, the corresponding standard edge distance and standard skirt board width are 1.89 in and 12 in, respectively. After these values were chosen, the next factor to consider is belt cover. The environment of conveyor 2 is the same as conveyor 1; therefor, the same type of belt cover will be used. Belt cover material selection is limited to SBR, nitrite, polychloroprene (neoprene) and PVC. These types of covers are ideal in a potentially flammable environment. RMA Belt Grade The performance capabilities of RMA belt grade 2 (Table 7.4) make it an appropriate candidate for conveyor 2. Table 7.5 and 7.6 yield values of minimum carry thickness and minimum belt cover thickness, both of these values amount to a total thickness range of 3/32in to 5/32in. As a method of connection, a vulcanized spliced is recommended because of its cleanliness and high rated strength. 35| P a g e Idlers and Pulleys Idlers Idlers will be used for tension uptake to avoid excessive belt sagging. Table 5.19 shows suggested idler spacing which is dependent upon belt width (18in) and the bulk density of the material (38 lbf/ft3). The suggested idler spacing is every 5.5 ft and the return idlers are every 10ft. The idler diameter is determined by the belt weight per length, in this case it is for a multiple ply belt (Table 5.22). Given the bulk density of 38 lbf/ft3 and the belt width, the average belt weight is approximately 3.5 lbf/ft. 36| P a g e Next, using Table 5.1 the C4 CEMA standard idler with a diameter of 4in is selected. CEMA Idler Classification Roll Diameter Belt Width Classification (in) (in) B4 4 18 through 48 B5 5 18 through 48 C4 4 18 through 60 C5 5 18 through 60 **Adapted from table 5.1 ***Cema B & C load rating based on minimum of L10 of 30,000 hours at 500rpm Excel Table 11: Idler Class Pulley The dead shaft and the drive shaft pulley will both be standard steel pulleys are assumed to be the minimum available size of 8in in diameter. A crown in both pulleys can be used as an alignment mechanism. As mentioned previously in the design of conveyor 1, there is very little information available for selecting an appropriate pulley. Tension The equation denoted is used for basic conveyor tension calculations, which neglects energy losses. Excel Table 12 was constructed using the effective tension equation at various heights and elevation angles. 37| P a g e Effect Tension (Basic Method) Elevation Angle Weight of Material (lbf/ft) 0.0735 Degrees Radians Weight of Belt (lbf/ft) 3.5 Table 5.22 Carry Length (ft) 18 Max Height (ft) 8 30 0.523599 Mid Height (ft) 6 22 0.383972 Min Height (ft) 4 14.5 0.253073 Effect Tension (lb) 5.68092 Min Height Effective Tension 5.38692 Load Based Tension (max H) (lbf*ft) 113.1004 Load Based Tension (mid H) 152.6295 Load Based Tension (low H) 228.3569 Excel Table 12: Tension Drive The drive design will consist of a DC motor, gear reduction to increase torque and reduce speed, and a coupling device. Pulley speed is calculated using the equation: 𝑃𝑢𝑙𝑙𝑒𝑦 𝑟𝑝𝑚 = where V equals belt speed. Pulley speed (rpm) Pulley Radius (in) Belt speed (FPM) Pulley speed (rpm) 𝑉 2𝜋𝑟 4 400 191.0828 Excel Table 13: Pulley Speed Using pulley radius and the effective tension values for torque and power were calculated. Pulley Torque max (lbf*ft) Torque min (lbf*ft) Power Max (hp) Power Min (hp) 76.11896 37.70012 2.767962 1.370913 Excel Table 14: Pulley Power and Torque Motor The classification of wood debris as Class III Fibers (easily ignitable), requires that an explosion proof motor be used. Assuming that the power calculated for the pulley is equal to the power provided by the motor a 3 phase AC explosion proof motor was selected using the tension results. 38| P a g e Motor Characteristics Power (hp) 3 Actual Power Torque (lb*ft) 9.06 Actual Torque Speed (rpm) 1755 Actual Speed Full Load Efficiency (%) 89.5 Efficiency 0.895 2.685 8.1087 1570.725 Excel Table 15: Motor Characteristics Using the pulley rotational speed, torque, and calculated power values along with the values of motor power, speed, and rated torque a gear ratio of approximately 9:1 is appropriate for a speed reduction and a torque increase. 39| P a g e Drive Calculations Pulley Torque lbf*ft 76.11896 Pulley speed (rpm) 191.0828 Pulley Power (hp) 2.767962 Motor Power (hp) 3 Motor speed (rpm) 1755 Motor Torque (lb*ft) 9.06 Gear Ratio 9.1845 Speed decrease 8.401652 Torque Increase Excel Table 16: Drive Calculations To verify that the motor will be able meet the design expectations, a recalculation using only the variables of the motor and the gear ratio are used to calculate the output at the pulley. The torque output will be greater than necessary but the values will suffice. Reversed Calculations Motor Power (hp) 3 Actual Power 2.685 Motor Speed (rpm) 1755 Motor Torque 9.06 Gear Ratio Pulley Torque Pulley Speed Pulley Power 9.1845 83.21157 191.0828 3.025875 Excel Table 17: Reversed Drive Calculations Gear Selection Due to the compact nature of the overall conveyor design and the familiarity with the gear type, a compact worm gear is selected for the drive design. The worm gear also has the unique capability of being classified as a right angle drive, which means that the gear and the worm are perpendicular to one another (shown in figure). Efficiency ranges from 50-90% and depends on the gear ratio and the material types. BostonGears.com provided a specification sheet that helped with the selection of the appropriate sized worm and worm gear. The selection is presented in an excel table. 40| P a g e Worm Gear Diametral Pitch (in) 8 Worm Material Steel Worm Gear Material Cast Iron Double thread Ratios 10:1 to 30:1 Excel Table 18: Worm Gear Calculations Coupling Selection: (1010GC02 Double Engagement) To correctly select the appropriate coupling an online manual supplied by Power Drive is used. The necessary parameters (as specified by the technical manual) and their corresponding values have been arranged into an Excel table which is shown below Coupling Selection System Torque (lb*in) 108.72 Motor power (hp) 3 Running Speed (rpm) 1755 Application Type Conveyor Motor Shaft Diameter (in) 1.12 10:1 Gear ratio Worm Gear Shaft Diameter 0.8 Gap between shafts (in) 0.25 assumed Excel Table 19: Coupling The following schematic is used to determine the motor shaft diameter for the above Excel Table. 41| P a g e **Images adapted from Baldor Explosion Proof Motors technical Manual 1. Motor Torque Now that the specified values are known and organized, the first step is to determine the system torque which was calculated in the previous Drive section to be about 108.72lb-in. 2. Service Factor Next, the service factor for the conveyor application was determined to be 1.25 considering that the conveyor is essentially a bucket conveyor. Table adapted from powerdrive.com 42| P a g e 3. Coupling Rating After the S.F. (service factor) is determined the minimum required coupling rating can be calculated by multiplying the service factor by the torque: 𝑀𝑖𝑛𝑖𝑚𝑢𝑚 𝐶𝑜𝑢𝑝𝑙𝑖𝑛𝑔 𝑅𝑎𝑡𝑖𝑛𝑔 = 135.9 𝑙𝑏 ∙ 𝑖𝑛 4. Design Power (Hp) To determine the design horsepower, the actual power is multiplied by the service factor yielding: 𝐷𝑒𝑠𝑖𝑔𝑛 𝐻𝑜𝑟𝑠𝑒𝑝𝑜𝑤𝑒𝑟 = 3.75ℎ𝑝 5. Type Using the shaft diameters of the worm and the motor, rated torque of the coupling, and allowable speed, type 1010GC02 was selected from the table below Table adapted from powerdrive.com Figure adapted from powerdrive.com 43| P a g e 6. Size Size is selected by using the motor speed; in this case 1755rpm which is not located on the chart but rather it is in between the two speeds of 1750 and 1800. The exact value is not necessary because the purpose is to confirm or deny the selection of the coupling is correct in the previous step. Using the maximum coupling rating of 280 and 288 one can determine that the selection of 1010G is suitable because the rated hp of the selection (3.75hp) is much less than these values. Table adapted from powerdrive.com Worm Gear to Drive Shaft Mounting: For optimal performance and safety reason, a method of connection of the worm gear to the drive pulley of the conveyor needs to be determined. In a high dust environment, it is standard to provide a cover/guard on all moving parts. This factor means that housing should be integrated into the connection method. The worm gear will be bolted onto the shaft. Actuator The main characteristic that separates the conveyor relaying pellets to storage from the conveyor relaying pellets to the boiler is the ability to change elevation with respect to the increasing or decreasing height of pellets in the storage area. Research was conducted on various types of linear hydraulic, pneumatic, and electromechanical actuators to determine the appropriate fit. The following conclusions were reached: Although hydraulic actuators are very precise and are used in high force applications, they may present problems in control difficulty. Also addressed is the possibility of leaking hydraulic fluid and the need for a constantly running compressor. In the case of a pneumatic actuator, a compressor is also required. A favorable attribute is the quick response time. Due to the compressibility of air and the resulting low load capability, the pneumatic actuator will not be a likely candidate. 44| P a g e Electromechanical are cause less waste in the form of emissions (no air or fluid) and are more reliable because of ease of control. One pitfall of electromechanical actuators is the initial cost. Due to the more favorable attributes an electromechanical linear actuator is selected based on the maximum load that will be lifted. I contacted a Duff-Norton supplier who sent a linear actuator technical manual. The figures below show the possible choices based on a capacity. There is a rather small load of approximately 127 lbs with just the material and the belt weight. The motor alone weighs 137 lbs, yielding a net value of 264lbs. Once the strength analysis of the frame is completed a better assessment of the total weight will be made. For intents and purposes, the range of actuators considered will be in the capacity range of 500lbs. 45| P a g e Because of the larger retraction length, MPD6905-18 is selected. To find where the actuator should be placed to achieve a height range of 8ft similar triangles are used. A brief explanation is shown below: Actuator placement on the frame Conveyor height (ft) Conveyor carry length (ft) Conveyor length (ft) Actuator Retract length (ft) cos 30 Retract Position (hypotenuse) (ft) x position (ft) 8 16 13.86 2.1875 0.866 4.375 3.78875 Excel Table 20: Drive Calculations 26.25 16 ∗ cos(30) ∗ ( 12 ) ∴𝑥= 8 ∗ cos(30) 46| P a g e Excel Data Conveyor 1 Parameters of the Conveyor: Know Values: Angel of incline(degrees)-(radians) Inclined length (ft) Horizontal length (ft) Capacity (lb/min) Bulk density (lbf/ft^3) Total Belt length (ft) Carry Length (ft) Drop height(ft) Drum Diameter (in)-(ft) Center of belt (in) Chart 1 Calculated values Height of conveyor (ft) Total horizontal (ft) Capacity (tph) Capacity (ft^3/hr) Gravity (ft/min^2) 30 10 3 2440 38 26 13 1.5 8 12 8.660254038 8 73.2 4623.157895 115920 Conversion 0.523598776 0.666666667 Chart 2 **Data obtained from the values in Chart 1 47| P a g e Summary of Collected Data from CEMA: Belt Conveyors for Bulk Materials: Table Values Angle of repose (degrees) Angle of surcharge (degrees) D.F (Capacity design factor) Recommended Belt Speed (fpm) Belt width-Using Q100 (inches) Skirt board width (in) Idler class Idler Spacing @ BW= 24in (ft) Average Belt weight (lbf/ft) Skirt board Friction Factor (Cs) Pulley face width (in) Distance between Discharge Chute (in) Return belt Clearance (in) Minimum Carry Thickness (in) Minimum Pulley Cover thickness (in) Belt Grade Cross sectional Area (ft^2) @surch 30 Capacity at 100fpm @ surch 30 (ft^3/hr) Edge Distance (in) Idler Load Rating Idler Selection Idler Diameter of Class C4 (in) Idler weight (lbf) Chart 3 48| P a g e 40 30 1.2 600 24 16 B4-D6 5 4.5 0.009 26 29 0.5 0.0625 0.03125 RMA Grade 2 0.241 1444 2.22 475 CEMA C 4 15.2 Table Number Table 4.7 Table 4.7 Page 55 Table 4.2 Table 4.7 Table 4.10 Table 5.1 Table 5.19 Table 5.22 Table 6.40 Table 7.32 Table 7.32 Table 7.32 Table 7.5 Table 7.6 Table 7.4 Table 4.7 Table 4.7 Table 4.3 Table 5.35 Table 5.35 Table 5.1 Table 5.42 Conversion Units 0.698131701 radians 0.523598776 radians 2 ft 1.333333333 ft Calculated values Capacity at 100fpm Belt load cross sectional area (ft^2) Material Weight (lbf/ft) Effective Tension (lbf) Initial Material Velocity Frequency Factor Transfer (belt speed) fpm Pulley rpm power (lbf*rpm) Total Load (vertical comp)(lbf) Tension Based on Load (lbf) Pulley Torque (lbf*ft) Horizontal Load (lbf) Note: 770.5263158 Q100 0.107017544 A 4.066666667 42.01303309 589.711794 Vo 0.043333333 Minutes to make one round 600 147.13 4201.378889 7.638870707 Hp 74.18950959 concentrated load (incline) 42.83333333 28.55555556 Tension*drum radius 25.7 concentrated load (horizontal) Chart 4 **Values obtained using the values in Chart 3 Maintenance dimensions pulley replacement (in) idler replacement primary side (in) idler replacement secondary side (in) clearance under conveyor (in) Skirt Board replacement height (in) Skirt Board Adjustment (in) Belt repair area (in) Chart 5: Frame design 49| P a g e Table 2.25-31 36 54 12 24 9 6 72 References BACtalk Product Line. N.p., n.d. Web. 01 Dec. 2013. Baldor Electric Company, a Leader in Energy Efficient Electric Motors, linear Motors and Adjustable Speed Drives Industry. N.p., n.d. Web. 1 Dec. 2013. <http://www.baldor.com/default.asp>. Baldor. "Product Overview: EM7142T-C." Baldor Electric Company, a Leader in Energy Efficient Electric Motors,linear Motors and Adjustable Speed Drives Industry. N.p., n.d. Web. 04 Mar. 2014. *Belt Conveyors for Bulk Materials. 6th ed. Naples, FL: CEMA, 2007. Print.* Marek, James. "Choosing Between Electromechanical and Fluid Power Linear." Thomson Industries, Inc. N.p., n.d. Web. <http://www.thomsonlinear.com/downloads/articles/Choosing_Between_Electromechanical_and_Fluid_ Power_taen.pdf>. "Welcome to Boston Gear." Welcome to Boston Gear. N.p., n.d. Web. 27 Nov. 2013. <http://bostongear.com/products/open/worms.html>. 50| P a g e