471Chapter_3
advertisement

Chapter 3
Baseband Pulse and Digital Signaling
Based on the fundamentals learned in Chapters 12, we now consider specific communication issues.
1. Pulse code modulation and delta
modulation
2. N-ary digital signals
3. Intersymbol interference
4. Multiplexing
5. Transmission
Basic Model of Communication
Digital
Source
Transmitter
Channel
Receiver
Destination
Source generates from a finite set of symbols.
Transmitter
Source
Encoder
Channel
Encoder
Baseband
Signaling
• Source Encoder translates the out put of the source in an
efficient manner for communication (e.g.,
compression).
• Channel Encoder transforms the coded source to enable
error detection and correction at the receiver (e.g., add
redundancy).
• Baseband signaling encodes digital information in a
sequence of analog pulses.
Practical consideration of Channel
Modulation
Physical
Transmission
Physical
Medium
Physical
Reception
Demodulation
Noise
Channel model used in this class (simplified)
H(f)
Receiver
Optimal
Filter
Channel
Decoder
Source
Decoder
Optimal filter makes “best guess” of transmitted
analog pulses.
Channel decoder inverses operation of channel
encoder (i.e., error detection and correction).
Source decoder inverses operation of source
encoder.
Pulse Amplitude Modulation (PAM)
• Baseband operation
• Transforming continuous time analog signals
into discrete time analog pulses
• Information carried in amplitude of pulses.
• First step in the analog to digital conversion
(A/D)
• Pre-cursor to Pulse Code Modulation (PCM)
• Sometimes, PAM signals are used directly for
transmission without making it into PCM
• Two types of PAM
– Gating
– Sample and hold
Analog Source over Digital Communication
Analog
Source
A/D
Conversio
n
Digital
Communication
System
D/A
Conversion
Analog
Output
•PAM can be thought of as
- Hybrid analog / digital communication system
- Part of analog-to-digital conversion process
Gated signal ws(t) of given original signal bandlimite d signal w(t) (to B hertz)
1
t kTs
ws (t ) w(t ) s (t ) where s(t )
,
and
f
2B
s
Ts
Theorem : Spectrum, Ws(f), of gated PAM
Ws(f) F ws(t) d
sin nd
W ( f nf s ), where d
nd
Ts
Any one of these has the same
shape as the original W(f). Thus
gated PAM is a linear operation.
Demodulation of Gated PAM signal
Oscillator multiplies cos(nwst) to the received PAM signal.
This operation is equivalent to bringing down the frequency of
received signal by nws.
Let Sample - and - Hold (S/H) signal of given bandlimite d signal w(t) (to B hertz) be ws(t) Ws(f).
S/H PAM is also called the flot top PAM. S/H PAM is created by instantane ously sampling
ws(t) and hold the sampled value for a certain duration before the next sample is taken.
1
Theorem. Ws ( f ) H ( f ) W ( f kfs )
Ts
k
sin f
where f s 2 B and H ( f ) F h(t)
f
They do not have the same shape as
the original W(f). Thus S/H PAM
is a non linear operation.
.
Pulse Code Modulation (PCM) is a special form of A/D conversion. It consists of
sampling, quantizing, and encoding steps. It is widely popular because:
- Used for long time in telephone systems
- Inexpensive electronics exists
- Errors can be corrected during long haul transmission
- Can use time division multiplexing
PCM
signal
Signals in PCM Process
Design Issues for
PCM
- Analog to Digital Conversion
Aliasing
Sample timing accuracy
Quantization noise
D/A accuracy
Reconstruction filter
- Digital Communication Technique
Encoding and decoding
Signal format
Transmit and receive filters
Channel effects
Statistical decision making error
Bandwidth of PCM
Assume w(t) is bandlimited to B hertz.
Minimum sampling rate = 2B samples / second
A/D output = n bits per sample (quantization level M=2n)
Assume a simple PCM without redundancy.
Minimum channel bandwidth = bit rate /2
Bandwidth of PCM signals:
BPCM nB (with sinc functions as orthogonal basis)
BPCM 2nB (with rectangular pulses as orthogonal basis)
For any reasonable quantization level M, PCM requires
much higher bandwidth than the original w(t).
Effects of Noise
Types of Noise
• Quantizing noise (during A/D conversion)
• Environment noise (e.g., EM interference)
• Filtering noise (low pass filtering at decoder)
Types of Quantization Noise
• Overload noise (input too large)
• Random noise (input too small)
• Granular noise (non uniform error jump)
• Hunting noise (too long of quite time)
Special quantizers are used (µ-law, A-law quantizers)
peak signal to noise ratio : signal power is measured at it peak value .
3M 2
S
2
3
M
(when Pe is negligible .)
2
N pk out 1 4 M 1 Pe
average signal to noise ratio : signal power is measured at it average value.
M2
S
M 2 (when Pe is negligible .)
2
N out 1 4 M 1 Pe
M : quantizati on levels
Pe : probabilit y of bit error in channel
2
S
Let M 2n M 2 2n 22 n
N out
S
S
2n
10 log 10 log 2 20n log 2 6.02n
N dB
N out
This equation states that for each bit added to the PCM scheme, about 6 - dB is gained
in the signal - to - noise ratio.
Performance of PCM
(Pe 0, uniform quantization steps)
Example) PCM used in telepho ne systems
Voice is considered to be bandlimite d at 4 kHz ( B). f s 8,000 samples per second
Each sample is converted into an 8 - bit binary number. n 8 bits per sample
Bit rate of binary PCM signal, R :
R f s samples/se cond n bits/sampl es 64 kbits/seco nd (this is known as DS - 0 signal.)
minimum bandwidth : B min
null bandwidth : BPCM
1
R 32kHz (when sinc function is used.)
2
R 64kHz (when rectangula r pulse is used)
2
S
3 28 52.9dB
N pk out
Quantization
Quantization is a non linear transformation which maps elements
from a continuous set to a finite set. It is also the second step
required by A/D conversion.
Analog Signal
- Continuous time
- Continuous value
Sample
Quantize
- Discrete time
- Continuous value
Digital Signal
- Discrete time
- Discrete value
Uniform Quantization
V
output w2(t)
-V
V
input w1(t)
-V
Region of operation
For M=2n levels, step size :
= 2V /2n = V(2-n+1)
Quantization Error, e
V
output w2(t)
-V
V
input w1(t)
-V
/2
-/2
Error, e
input w1(t)
Error is symmetric
around zero.
0
Average error power :
3
V
2
n 1 2
1
2
2
V
2
V 2 2n
2
2
2
e ( s )ds x dx
2
2V V
0
3 12
12
3
Suppose the input signal is a triangula r wave between V and V .
2
V2
Then the average signal power is
.
3
S
22 n
N out
Definition. The dynamic range of an input signal is the
ratio of the largest to the smallest power levels which the
input signal can take on and be reproduced with the
acceptable signal distortion.
The dynamic range of the quantizer input in the PCM
system is 6n dB.
Nonuniform Quantizer
Used to reduce quantization error and increase the dynamic
range when input signal is not uniformly distributed over its
allowed range of values.
allowed
values
values
for most
of time
input
time
“Compressing-and-expanding” is called “companding.”
Nonuniform quantizer
Compressor
Uniform
Quantizer
digital
signals
••••
Discrete
samples
••••
Channel
received
digital
signals
Decoder
Expander
output
Compression Techniques
A - law compressor
w1 (t ) 1,
A0
A w1 (t )
1 ln A
w2 (t )
1 ln A w1 (t )
1 ln A
- law compressor
(very popular internatio nally)
w1 (t ) 1
ln 1 w1 (t )
w2 (t )
ln 1
In the U.S., 255 is used.
0 w1 (t )
1
A
1
w1 (t ) 1
A
Practical Implementation of µ-law compressor
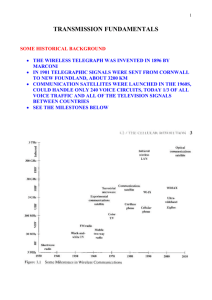
Output SNR of 8-bit PCM systems
with and without companding.
Baseband Signaling
Receiver
Transmitter
Baseband
Signaling
w(t)
Channel
H(f)
w#(t)
Optimal
Filter
• Once the sending end prepared digital signals (e.g.,
PCM) to send, now it is the job of Baseband Signaling
to
prepare the signals suited for the channel.
• What should w(t) be?
Orthogonal set
N of signals {k (t), k=1,2,3, ..., N}
w(t ) wkk (t ), for 0 t To
k 1
Note
• For practical implementation, we can only use a finite
number, N, of the orthogonal set of signals {k (t), k=1,2,3, ..., N}.
• Again, for practical implementation, the time duration must be
finite, To < .
• The goal is to find a set {k (t), k=1,2,3, ..., N} such that
w(t) represents the digital signals prepared (e.g., PCM) and
a small amount of distortion in the channel does not
affect the recovery of w(t) from the received signal, w#(t).
Example. In ASCII character, “X” is 0001101. Then, using a certain
{k (t), k=1,2,3, ..., 7}, “X” is represented (for 0 < t < To) as
w(t ) w11 (t ) w22 (t ) w33 (t ) w44 (t ) w55 (t ) w66 (t ) w77 (t )
where w1 0, w2 0, w3 0, w4 1, w5 1, w6 0, w7 1.
Or we can view the coeffients wk ' s as components of a vector. Then,
w1 , w2 , w3 , w4 , w5 , w6 , w7 0,0,0,1,1,0,1
Generally, we can use a vector space notation.
N
w wk φk w1 , w2 , w3 ,..., wN
k 1
where k ,1,2,3,...N is a set of N - dimensiona l orthogonal unit vecto rs.
Definition. Baud (symbol) rate D = N / To.
Definition. Bit rate R = n / To where n is the number
of data bit sent in To seconds.
If wk is binary, n = N and w(t) is a binary signal.
If wk is not binary, n N and w(t) is a multilevel
T
signal.
1
#
#
*
At the receiver, wk
w
(
t
)
k (t ) dt , for k 1,2,3,..., N .
Kk
o
0
This process is called the matched filter (i.e., use the same orthogonal
basis to get the original signal back.) Then, the receiver reconstruc ts w(t ) by
N
w(t ) wk#k (t ), for 0 t To . If the channel was clean (i.e., no noise),
k 1
w(t) is recovered without error.
Example. 3 - bit binary signal in the figure. ( N 3)
1
s(t ) d j p j (t ) where p j (t ) p t j T .
2
j 1
d d1 , d 2 , d3 1,0,1
3
Let j (t )
p j (t )
To
0
1
T
j (t )
0
p j (t )
p 2j (t )dt
j 1T t
elsewhere
s s1 , s2 , s3 5 T , 0, 5 T
3
s(t ) s j j (t )
j 1
25To
jT
Binary signaling with M 256 messages. To 8 ms. M 2n 22 256. n 8
Given a codeword 01001110 : w w1 , w2 , w3 , w4 , w5 , w6 , w7 , w8 0,1,0,0,1,1,1,0
Case 1. Retangular pulse as basis set
Pulse duration Tb 1 ms
Amplitude 1
first null bandwidth B D 1,000 Hz
Case 2. Sinc functions as basis set
sin t kTs
T
k (t ) s
t kTs
Ts
Ts is a sampling frequency.
For this case, Ts Tb .
minimum bandwidth B
1
D 500 Hz
2
Multilevel signaling ( L 4 levels) with M 256 messages. To 8 ms.
L 2l. Then, we need to encode l-bit binary data into one signal level (out of L levels).
If L 4, then the following might be used
Binary Input
11
10
00
01
Output Voltage
+3
+1
-1
-3
Example. 01 00 11 10 -3 -1 +3 +1
w1 = -3, w2 = -1, w3 = +3, w4 = +1
Note that 2ms is allowed for sending each symbol.
Line Code
• On the channel, we might want to send binary numbers
directly.
• The resulting bit patterns on the channel might create a
static voltage, which is not desired.
• Use line code to eliminate the average static voltage.
- Save power
- Save bandwidth (possibly)
1
5 volt
1
1
1
1
average
static voltage
0 volt
0
0
0
0
0
0
Types of Line Code
• Unipolar signaling: 1 = +A volt, 0 = 0 volt
• Polar signaling: 1 = +A volt, 0 = -A volt
• Biopolar signaling: 1 = +A or –A, 0 = 0 volt
(Also called the alternate mark inversion – AMI)
• Machester signaling:
1 = +A (half duration) followed by –A (half duration)
0 = -A (half duration) followed by +A (half duration)
Additional combinations can be made along with RZ
(return to zero) and NRZ (non return to zero).
Desired Properties of Line Code
• Self synchronization
• Low probability of bit error
• Spectral efficiency
• Low transmission speed
• Error detection capability
• Transparency
Power Spectral Density for Line Code
(We will not follow the details in the book.)
N
At the source, wT (t ) an f (t nTb )
n 1
where f (t ) is a symbol pulse.
wT (t ) is the signal observed for 0 t T (T NTb ).
an is data value for the n th symbol.
Ps ( f ) lim T
1
2
wT (t )
T
Eye Pattern
Seen in oscilloscope
The Cleaner, the better
Good indication of transmission quality
Regenerative Repeater
Suppose for any given bit, Pe probabilit y that thi s bit is incorrectl y regenerate d by a
regenerati ve repeater. If this bit were to go through a series of m regenerati ve repeaters,
m
m i
Pi Pei 1 Pe
where Pi is the probabilit y that thi s bit is incorrecte ly regenerate d
i
by i regenerati ve repeaters. After m regenerati ve repeaters, this bit will be in error,
if an odd number of errors take place.
Pme probabilit y a bit in error after m regenerati ve repeaters
m
i 1
i is odd
m i
Pe 1 Pe m i mPe
i
Bit Synchronization
To accurately detect received signals,
synchronization timing is needed.
- derived from received data
- separate signal sent from source
Synchronization
- bit level
- frame level
- carrier level
Binary-to-Multilevel Conversion
Spectral Efficiency
Definition . Spectral efficiency η
By Shannon : ηmax
Line Code
Unipolar NRZ
Polar NRZ
Unipolar RZ
Bipolar RZ
Manchester NRZ
Multilevel polar NRZ
R
bits per second.
B
C
S
log 2 1
B
N
First Null Bandwidth
(Hz)
R
R
2R
R
2R
R/l
Spectral Efficiency
=R/B bits/s
1
1
0.5
1
0.5
l
Intersymbol Interference
• No channel has infinite bandwidth
• Most transmission schemes require higher bandwidth than available in the
channel.
- Square wave requires infinite bandwidth.
- Synch function is not possible due to causality violation.
- Modified synch function to satisfy the causality requires higher bandwidth.
• Each symbol may be smeared into adjacent time slots.
• Intersymbol Interference (ISI) is the spreading of symbol pulses from
one slot into adjacent slots.
Baseband Pulse-Transmission System
Let win (t ) be a flat top L - level signal. ( an can take on one of L values.)
t
1
Symbol rate D
Suppose win (t ) an h(t nTs ) where h(t ) Π .
Ts
n
Ts
win (t ) an h(t ) (t nTs ) an (t nTs ) h(t )
n
n
Then, wout (t ) an (t nTs ) he (t ) where he (t ) h(t ) hT (t ) hC (t ) hR (t ).
n
he (t ) : equvalent impulse response function. he (t ) H e ( f ) H ( f ) H T ( f ) H C ( f ) H R ( f ).
Choose H e ( f ) to minimize ISI by selecting (or tuning ) H R ( f ). H R ( f ) : equalizing filter.
HR( f )
He ( f )
H ( f ) HT ( f ) H C ( f )
Finding He(f)? Nyquist’s First Method (Zero
ISI)
C
Find he (t ) such that he (kTs )
0
k 0
k 0
is needed to account for the offset in the receiver sampling clock.
If such he (t ) can be found, a single input pulse at t 0 creates a non zero value at the output of the
receiver at t , but all other sampling times t kTs (for k 0), the receiver output is zero. zero ISI.
If 0, then one possible solution is he (t )
sin f st
1 f
H e ( f )
f st
fs fs
This is impractica l because :
he (t ) is non causal.
The sampling times at the receiver output have to be precise to maintain zero ISI.
Finding He(f)? Raised Cosine-Rolloff Nyquist
Filtering
1
f f1
1
Find H e ( f ) such that H e ( f ) 1 cos
2
2
f
0
f f1
f1 f B
f B
B : absolute bandwidth, f B f o , f1 f o f , f o : 6 - dB bandwidth of filter
f
Rolloff factor : r
fo
D
2B
1 r
sin 2f ot cos 2f t
H e ( f ) he (t ) 2 f o
2
2
f
t
1
4
f
t
o
Theorem. A filter is said to be a Nyquist filter
if the effective transfer function is
f
Y ( f )
2
f
o
He ( f )
0
f 2 fo
Otherwise
Y(f) satisfies (1) Y ( f ) Y ( f ) for f 2 f o
and (2) Y ( f f o ) Y ( f f o ) for f f o .
There is no ISI if D f s 2 f o .
Raised Cosine-Rolloff Filter as Nyquist Filter.
Other Nyquist Filters
H(f)
1
H(f)
1
f
-2fo
-fo
fo
2fo
f
-2fo
-fo
fo
2fo
Example. Binary PCM system
Input : Analog signal (e.g., voice)
Quantized to 16 levels - bipolar signal
Channel H e ( f ) : Raised Cosine - Rolloff filter wit h r 0.5 and B 4kHz
B
4 x10 3
fo
2.667 x103 2.667 kHz
1 r 1 0.5
Baud rate D 2 f o 5.333kHz
16 quantizati on levels 4 bits per sample
signal sample rate f s 4 D 21.332kHz
Bandwidth B
fs
0.667 kHz 10.666kHz
2
How are Nyquist filters realized?
H(f)
HT(f)
HC(f)
HR(f)
channel characteristics
is unknown.
Equalization: HR(f) is an adaptive filter.
tune HR(f) till
match is achieved
H(f)
HT(f)
HC(f)
HR(f)
input test
sequence
Desired He(f)
specify desire
characteristics
+
+ compare
-
- OftenDifferential
voice and video
signalsCode
do not Modulation
change much from
Pulse
one
(DPCM)
sample to next.
- Such signals has energy concentrated in lower frequency.
- Sampling faster than necessary generates redundant
information.
Can save bandwidth by not sending all samples.
* Send true samples occasionally.
* In between, send only change from previous value.
* Change values can be sent using a fewer number of
bits
than true samples.
Examples (CCITT standards)
* 32 k bits / s (4-bit quantization and 8 k samples /s) for
3.2kHz
* 64 k bits / s (4-bit quantization and 16 k samples /s) for
7 kHz
For slowly varying signals, a future sample can predicted
from past samples.
s(t)
+
Predictor
Transmitter Side
+
-
e(t)
e(t)
+
s(t)
+
+
Predictor
Receiver Side
Transversal filter can perform the prediction process.
One Implementation of DPCM
Quantization error is accumulated.
Another Implementation of DPCM
Quantization error is not accumulated.
Delta Modulation (DM)
- Special type of DPCM with M = 2.
Inexpensive and simple to implement.
DM Waveform
Some notes about DM
Bit rate = sampling rate
Reconstructed signal
where y(iTs) = +1 or
n
z (nTs ) y (iTs )
-1
i 1
and is the step size.
Types of noise
* Quantization noise: step size takes place of smallest
quantization level.
* Granular noise: z(nTs) is always different from z((n-1)Ts).
* Slope overload noise: maximum slope of output signal is
/ Ts.
too small: slope overload noise
too large: quantization noise and granular noise
There is an optimum value for in terms of signal
bandwidth,
signal power, and sampling frequency.
Example. Let w(t) A cos2πf ot and the sampling frequency, f s kfo
where k is an integer, k 2. What is the minimum value of δ for no slope overload?
dw(t )
2 Afo π sin 2πf ot which has the maximum value of 2 Afo π.
dt
1
1
Ts
f s kfo
2 Aπ
For no slope overload,
2 Af o .
Ts
k
Adaptive Delta Modulation
Inappropriate step size creates noise.
Make adaptive.
number of successive 1’s or 0’s
size
1
2
3
4
.
step
2
4
.
ADM Block Diagram.
Speech Coding
- Waveform coders: output approximates original voice
signal.
* PCM, DPCM, DM, CVSD (24 – 64 k bits/s)
- Vocoder: parameterize voice signals based on speech
models
* CELP, VSELP (2 -16 k bits/s)
Time Division Multiplexing
• Time interleaving of samples from different sources to be transmitted over a
single communication channel.
Frame Synchronization
• Framing is done to delimit the boundaries of data units. (e.g., 24 PCM samples
collected from 24 difference sources, each corresponding to a voice sample)
• The receiver sees a continuous stream of symbols (for binary signals, 1’s and 0’s).
• How does the receiver know, for example, where the different PCM samples are?
Certain unique string of bits is used to indicate the boundaries of frames.
• The channel data may contain the bit patterns that happen to be identical to the
framing bit string.
Certain bit stuffing and de-stuffing methods are necessary to avoid such
situations.
• Probability of any arbitrary bit string matching a K bit framing string:
K
1
Pf 2 K
2
Frame Synchronizer
North American TDM Hierarchy.
T1 TDM Format for One Frame.
(8000 samples / s)