E5 Baseband Transmission
advertisement

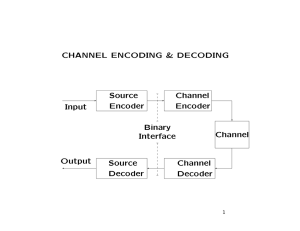
3F4 Data Transmission Introduction Dr. I. J. Wassell Pre-requisites • Familiarity with IB courses – Signal and Data Analysis (Paper 7) – Linear Systems and Control (Paper 6) – Communications (Paper 6) Booklist • Couch, L. W, “Digital and Analog Communication Systems,” Prentice Hall (5th Edition). Covers all except DFE. • Shanmugam, K. S. Digital and Analog Communication Systems,” Wiley. All except DFE. • Proakis, J. G, “Digital Communications,” McGraw Hill. • Wicker, S. B., “Error Control Systems for Digital Communication and Storage,” Prentice Hall, 1995. Applications • Data transmission over copper cables and optical fibres, e.g., – computer local area networks (LANs) – integrated services digital network (ISDN) connections, e.g., Basic rate (2B+D) and primary rate (30B+2D) channels. B=64kBit/s, D=16kBit/s. – 30 channel pulse code modulation (PCM), i.e., 30 telephony channels, 2.048MBit/s. – Asynchronous transfer mode (ATM) in wide area networks (WANs), e.g., 25MBit/s, 155MBit/s Applications • Data storage, – magnetic disk drives – magnetic tape drives – optical disk drives Topics Covered • Communications System Model • Pulse Amplitude Modulation (PAM) for baseband data transmission • Intersymbol Interference (ISI), noise and bit error rates (BER) • Pulse Shaping for bandwidth control and elimination of ISI Topics Covered • Line coding schemes • Optimum Transmit and Receive Filtering • Equalisation to compensate for undesirable channel characteristics • Error control coding (ECC) Baseband Transmission • The transmitted signal is limited to a range from -B Hz to +B Hz. |X(f)| 0 -B B Baseband |X(f)| f -fc 0 fc Bandpass • Example baseband channels include – copper cable, magnetic disk, CD-(ROM) f Comms System Model • Transmission of digital data in communications channels – True digital data, eg, comms in a computer network – Analogue information which has been converted to a digital format, eg anti-alias LPF followed by A/D conversion Transmission Model Error Digital Source Source Encoder Control Coding Line Coding Modulator (Transmit Filter, etc) Hc(w) Transmitter N(w) Digital Source Sink Decoder Error Control Decoding Receiver X(w) Noise Demod Line Decoding Channel (Receive Filter, etc) + Y(w) Components of the Model • Assume input source is in the form of symbols, eg bytes from a PC, or 16-bit audio samples • Source encoding- Transforms digital symbols into a stream of binary digits (BITS), eg PCM • Error Control Coding- Adding extra bits (redundancy) to allow error checking and correction. Components of the Model • Line Coding- Coding of the bit stream to make its spectrum suitable for the channel response. Also to ensure the presence of frequency components to permit bit timing extraction at the receiver. • Transmit Filtering- Generation of analogue pulses for transmission by the channel. Components of the Model • Channel- Will affect the shape of the received pulses. Noise is also present at the receiver input, eg thermal noise, electrical interference etc. • We will concentrate on the components to the right of the vertical dashed line. Channel Response Assumptions – Linear time-invariant (LTI) frequency response, ie, the channel frequency response Hc(w) is fixed, known and linear. – Additive Gaussian noise- The channel noise has a Gaussian amplitude distribution (pdf) is often assumed to be uncorrelated (ie white, flat power spectral density) and additive. Channel Response Thus the received signal may be expressed as, Y(w)= Hc(w) X(w)+N(w) Where, Hc (w) is the channel frequency response X(w) is the transmitted signal spectrum N(w) is the noise spectrum In practice, – Channel response may be non-linear, time-varying or unknown – Noise may be non-Gaussian, particularly interference.