Agent - klncecse
advertisement

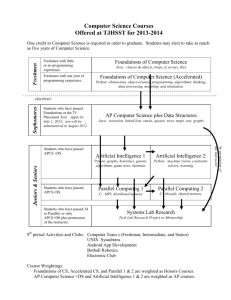
Unit-1 INTRODUCTION Intelligent Agents – Agents and environments Good behavior – The nature of environments Structure of agents Problem solving agents Example problems Searching for solutions Uninformed search strategies Avoiding repeated states – searching with partial information. Foundations of Artificial Intelligence 2 Introduction to AI and Intelligent Agents Some Definitions of AI Building systems that think like humans “The exciting new effort to make computers think … machines with minds, in the full and literal sense” -- Haugeland, 1985 “The automation of activities that we associate with human thinking, … such as decision-making, problem solving, learning, …” -- Bellman, 1978 Building systems that act like humans “The art of creating machines that perform functions that require intelligence when performed by people” -- Kurzweil, 1990 “The study of how to make computers do things at which, at the moment, people are better” -- Rich and Knight, 1991 Foundations of Artificial Intelligence 4 Some Definitions of AI Building systems that think rationally “The study of mental faculties through the use of computational models” -- Charniak and McDermott, 1985 “The study of the computations that make it possible to perceive, reason, and act” -- Winston, 1992 Building systems that act rationally “A filed of study that seeks to explain and emulate intelligent behavior in terms of computational processes” -- Schalkoff, 1990 “The branch of computer science that is concerned with the automation of intelligent behavior” -- Luger and Stubblefield, 1993 Foundations of Artificial Intelligence 5 Rationality Acting humanly: The Turing test approach requirement for Turing test. Two persons and one machine. 1. Interrogator (questioner) 2. B (a person) 3. A (a machine) Foundations of Artificial Intelligence 6 Turing’s “Imitation Game” Interrogator B (a person) A (a machine) Capabilities of computer Natural language processing To enable it to communicate successfully in english Knowledge representation To store what it knows or receives Automated reasoning To use the stored information to answer questions and to draw new conclusions. Machine learning To adapt to new circumstances. Foundations of Artificial Intelligence 8 Total Turing test It avoid physical interaction between questioner and computer because physical stimulation is unnecessary for intelligence. To pass total turing test the computer will need: a. Computer vision : To perceive objects. b. Robotics : To manipulate and move them. Foundations of Artificial Intelligence 9 Thinking humanly: cognitive modeling Develop a precise theory of mind, through experimentation and introspection, then write a computer program that implements it Example: GPS - General Problem Solver (Newell and Simon, 1961) trying to model the human process of problem solving in general Foundations of Artificial Intelligence 10 Thinking and Acting Rationally Thinking Rationally Capture ``correct'' reasoning processes” A loose definition of rational thinking: Irrefutable reasoning process How do we do this Develop a formal model of reasoning (formal logic) that “always” leads to the “right” answer Implement this model How do we know when we've got it right? when we can prove that the results of the programmed reasoning are correct soundness and completeness of first-order logic Acting Rationally Act so that desired goals are achieved The rational agent approach (this is what we’ll focus on in this course) Figure out how to make correct decisions, which sometimes means thinking rationally and other times means having rational reflexes correct inference versus rationality reasoning versus acting; limited rationality Foundations of Artificial Intelligence 11 AI in Everyday Life? AI techniques are used in many common applications Intelligent user interfaces Search Engines Spell/grammar checkers Context sensitive help systems Medical diagnosis systems Regulating/Controlling hardware devices and processes (e.g, in automobiles) Voice/image recognition (more generally, pattern recognition) Scheduling systems (airlines, hotels, manufacturing) Error detection/correction in electronic communication Program verification / compiler and programming language design Web search engines / Web spiders Web personalization and Recommender systems (collaborative/content filtering) Personal agents Customer relationship management Credit card verification in e-commerce / fraud detection Data mining and knowledge discovery in databases Computer games Foundations of Artificial Intelligence 12 AI Spin-Offs Many technologies widely used today were the direct or indirect results of research in AI: The mouse Time-sharing Graphical user interfaces Object-oriented programming Computer games Hypertext Information Retrieval The World Wide Web Symbolic mathematical systems (e.g., Mathematica, Maple, etc.) Very high-level programming languages Web agents Data Mining Foundations of Artificial Intelligence 13 What is an Intelligent Agent An agent is anything that can perceive its environment through sensors, and act upon that environment through actuators (or effectors) actuators Goal: Design rational agents that do a “good job” of acting in their environments success determined based on some objective performance measure Foundations of Artificial Intelligence 14 Example: Vacuum Cleaner Agent Percepts: location and contents, e.g., [A, Dirty] Actions: Left, Right, Suck, NoOp Foundations of Artificial Intelligence 15 What is an Intelligent Agent Rational Agents An agent should strive to "do the right thing", based on what it can perceive and the actions it can perform. The right action is the one that will cause the agent to be most successful. Performance measure: An objective criterion for success of an agent's behavior. E.g., performance measure of a vacuum-cleaner agent could be amount of dirt cleaned up, amount of time taken, amount of electricity consumed, amount of noise generated, etc. Definition of Rational Agent: For each possible percept sequence, a rational agent should select an action that is expected to maximize its performance measure, given the evidence provided by the percept sequence and whatever built-in knowledge the agent has. Omniscience, learning, autonomy Rationality is distinct from omniscience (all-knowing with infinite knowledge) Choose action that maximizes expected value of perf. measure given percept to date Agents can perform actions in order to modify future percepts so as to obtain useful information (information gathering, exploration) An agent is autonomous if its behavior is determined by its own experience (with ability to learn and adapt) Foundations of Artificial Intelligence 16 What is an Intelligent Agent Rationality depends on the performance measure that defines degree of success the percept sequence - everything the agent has perceived so far what the agent know about its environment the actions that the agent can perform Agent Function (percepts ==> actions) Maps from percept histories to actions f: P* A The agent program runs on the physical architecture to produce the function f agent = architecture + program Action := Function(Percept Sequence) If (Percept Sequence) then do Action Example: A Simple Agent Function for Vacuum World If (current square is dirty) then suck Else move to adjacent square Foundations of Artificial Intelligence 17 What is an Intelligent Agent Limited Rationality Optimal (i.e. best possible) rationality is NOT perfect success: limited sensors, actuators, and computing power may make this impossible Theory of NP-completeness: some problems are likely impossible to solve quickly on ANY computer Both natural and artificial intelligence are always limited Degree of Rationality: the degree to which the agent’s internal "thinking" maximizes its performance measure, given the available sensors the available actuators the available computing power the available built-in knowledge Foundations of Artificial Intelligence 18 PEAS Analysis To design a rational agent, we must specify the task environment PEAS Analysis: Specify Performance Measure, Environment, Actuators, Sensors Example: Consider the task of designing an automated taxi driver Performance measure: Safe, fast, legal, comfortable trip, maximize profits Environment: Roads, other traffic, pedestrians, customers Actuators: Steering wheel, accelerator, brake, signal, horn Sensors: Cameras, sonar, speedometer, GPS, odometer, engine sensors, keyboard Foundations of Artificial Intelligence 19 PEAS Analysis – More Examples Agent: Medical diagnosis system Performance measure: Healthy patient, minimize costs, lawsuits Environment: Patient, hospital, staff Actuators: Screen display (questions, tests, diagnoses, treatments, referrals) Sensors: Keyboard (entry of symptoms, findings, patient's answers) Agent: Part-picking robot Performance measure: Percentage of parts in correct bins Environment: Conveyor belt with parts, bins Actuators: Jointed arm and hand Sensors: Camera, joint angle sensors Foundations of Artificial Intelligence 20 PEAS Analysis – More Examples Agent: Internet Shopping Agent Performance measure?? Environment?? Actuators?? Sensors?? Foundations of Artificial Intelligence 21 Environment Types Fully observable (vs. partially observable): An agent's sensors give it access to the complete state of the environment at each point in time. Deterministic (vs. stochastic): The next state of the environment is completely determined by the current state and the action executed by the agent. (If the environment is deterministic except for the actions of other agents, then the environment is strategic). Episodic (vs. sequential): The agent's experience is divided into atomic "episodes" (each episode consists of the agent perceiving and then performing a single action), and the choice of action in each episode depends only on the episode itself. Foundations of Artificial Intelligence 22 Environment Types (cont.) Static (vs. dynamic): The environment is unchanged while an agent is deliberating (the environment is semi-dynamic if the environment itself does not change with the passage of time but the agent's performance score does). Discrete (vs. continuous): A limited number of distinct, clearly defined percepts and actions. Single agent (vs. multi-agent): An agent operating by itself in an environment. Foundations of Artificial Intelligence 23 Environment Types (cont.) The environment type largely determines the agent design. The real world is (of course) partially observable, stochastic, sequential, dynamic, continuous, multi-agent Foundations of Artificial Intelligence 24 Structure of an Intelligent Agent All agents have the same basic structure: accept percepts from environment generate actions A Skeleton Agent: function Skeleton-Agent(percept) returns action static: memory, the agent's memory of the world memory Update-Memory(memory, percept) action Choose-Best-Action(memory) memory Update-Memory(memory, action) return action Observations: agent may or may not build percept sequence in memory (depends on domain) performance measure is not part of the agent; it is applied externally to judge the success of the agent Foundations of Artificial Intelligence 25 Looking Up the Answer? A Template for a Table-Driven Agent: function Table-Driven-Agent(percept) returns action static: percepts, a sequence, initially empty table, a table indexed by percept sequences, initially fully specified append percept to the end of percepts action LookUp(percepts, table) return action Why can't we just look up the answers? The disadvantages of this architecture infeasibility (excessive size) lack of adaptiveness How big would the table have to be? Could the agent ever learn from its mistakes? Where should the table come from in the first place? Foundations of Artificial Intelligence 26 Agent Types Simple reflex agents are based on condition-action rules and implemented with an appropriate production system. They are stateless devices which do not have memory of past world states. Reflex Agents with memory (Model-Based) have internal state which is used to keep track of past states of the world. Agents with goals are agents which in addition to state information have a kind of goal information which describes desirable situations. Agents of this kind take future events into consideration. Utility-based agents base their decision on classic axiomatic utility-theory in order to act rationally. Note: All of these can be turned into “learning” agents Foundations of Artificial Intelligence 27 A Simple Reflex Agent We can summarize part of the table by formulating commonly occurring patterns as condition-action rules: Example: if car-in-front-brakes then initiate braking Agent works by finding a rule whose condition matches the current situation rule-based systems But, this only works if the current percept is sufficient for making the correct decision Foundations of Artificial Intelligence function Simple-Reflex-Agent(percept) returns action static: rules, a set of condition-action rules state Interpret-Input(percept) rule Rule-Match(state, rules) action Rule-Action[rule] return action 28 Example: Simple Reflex Vacuum Agent Foundations of Artificial Intelligence 29 Agents that Keep Track of the World Updating internal state requires two kinds of encoded knowledge knowledge about how the world changes (independent of the agents’ actions) knowledge about how the agents’ actions affect the world But, knowledge of the internal state is not always enough how to choose among alternative decision paths (e.g., where should the car go at an intersection)? Requires knowledge of the goal to be achieved Foundations of Artificial Intelligence function Reflex-Agent-With-State(percept) returns action static: rules, a set of condition-action rules state, a description of the current world state Update-State(state, percept) rule Rule-Match(state, rules) action Rule-Action[rule] state Update-State(state, action) return action 30 Agents with Explicit Goals Reasoning about actions reflex agents only act based on pre-computed knowledge (rules) goal-based (planning) act by reasoning about which actions achieve the goal less efficient, but more adaptive and flexible Foundations of Artificial Intelligence 31 Agents with Explicit Goals Knowing current state is not always enough. State allows an agent to keep track of unseen parts of the world, but the agent must update state based on knowledge of changes in the world and of effects of own actions. Goal = description of desired situation Examples: Decision to change lanes depends on a goal to go somewhere (and other factors); Decision to put an item in shopping basket depends on a shopping list, map of store, knowledge of menu Notes: Search (Russell Chapters 3-5) and Planning (Chapters 11-13) are concerned with finding sequences of actions to satisfy a goal. Reflexive agent concerned with one action at a time. Classical Planning: finding a sequence of actions that achieves a goal. Contrast with condition-action rules: involves consideration of future "what will happen if I do ..." (fundamental difference). Foundations of Artificial Intelligence 32 A Complete Utility-Based Agent Utility Function a mapping of states onto real numbers allows rational decisions in two kinds of situations evaluation of the tradeoffs among conflicting goals evaluation of competing goals Foundations of Artificial Intelligence 33 Utility-Based Agents (Cont.) Preferred world state has higher utility for agent = quality of being useful Examples quicker, safer, more reliable ways to get where going; price comparison shopping bidding on items in an auction evaluating bids in an auction Utility function: state ==> U(state) = measure of happiness Search (goal-based) vs. games (utilities). Foundations of Artificial Intelligence 34 Shopping Agent Example Navigating: Move around store; avoid obstacles Reflex agent: store map precompiled. Goal-based agent: create an internal map, reason explicitly about it, use signs and adapt to changes (e.g., specials at the ends of aisles). Gathering: Find and put into cart groceries it wants, need to induce objects from percepts. Reflex agent: wander and grab items that look good. Goal-based agent: shopping list. Menu-planning: Generate shopping list, modify list if store is out of some item. Goal-based agent: required; what happens when a needed item is not there? Achieve the goal some other way. e.g., no milk cartons: get canned milk or powdered milk. Choosing among alternative brands utility-based agent: trade off quality for price. Foundations of Artificial Intelligence 35 General Architecture for Goal-Based Agents Input percept state Update-State(state, percept) goal Formulate-Goal(state, perf-measure) search-space Formulate-Problem (state, goal) plan Search(search-space , goal) while (plan not empty) do action Recommendation(plan, state) plan Remainder(plan, state) output action end Simple agents do not have access to their own performance measure In this case the designer will "hard wire" a goal for the agent, i.e. the designer will choose the goal and build it into the agent Similarly, unintelligent agents cannot formulate their own problem this formulation must be built-in also The while loop above is the "execution phase" of this agent's behavior Note that this architecture assumes that the execution phase does not require monitoring of the environment Foundations of Artificial Intelligence 36 Learning Agents Four main components: Performance element: the agent function Learning element: responsible for making improvements by observing performance Critic: gives feedback to learning element by measuring agent’s performance Problem generator: suggest other possible courses of actions (exploration) Foundations of Artificial Intelligence 37 Search and Knowledge Representation Goal-based and utility-based agents require representation of: states within the environment actions and effects (effect of an action is transition from the current state to another state) goals utilities Problems can often be formulated as a search problem to satisfy a goal, agent must find a sequence of actions (a path in the state-space graph) from the starting state to a goal state. To do this efficiently, agents must have the ability to reason with their knowledge about the world and the problem domain which path to follow (which action to choose from) next how to determine if a goal state is reached OR how decide if a satisfactory state has been reached. Foundations of Artificial Intelligence 38 Intelligent Agent Summary An agent perceives and acts in an environment. It has an architecture and is implemented by a program. An ideal agent always chooses the action which maximizes its expected performance, given the percept sequence received so far. An autonomous agent uses its own experience rather than built-in knowledge of the environment by the designer. An agent program maps from a percept to an action and updates its internal state. Reflex agents respond immediately to percepts. Goal-based agents act in order to achieve their goal(s). Utility-based agents maximize their own utility function. Foundations of Artificial Intelligence 39 Exercise Do Exercise 1.3, on Page 30 You can find out about the Loebner Prize at: http://www.loebner.net/Prizef/loebner-prize.html Also (for discussion) look at exercise 1.2 and read the material on the Turing Test at: http://plato.stanford.edu/entries/turing-test/ Read the article by Jennings and Wooldridge (“Applications of Intelligent Agents”). Compare and contrast the definitions of agents and intelligent agents as given by Russell and Norvig (in the text book) and and in the article. Foundations of Artificial Intelligence 40 Exercise News Filtering Internet Agent uses a static user profile (e.g., a set of keywords specified by the user) on a regular basis, searches a specified news site (e.g., Reuters or AP) for news stories that match the user profile can search through the site by following links from page to page presents a set of links to the matching stories that have not been read before (matching based on the number of words from the profile occurring in the news story) (1) Give a detailed PEAS description for the news filtering agent (2) Characterize the environment type (as being observable, deterministic, episodic, static, etc). Foundations of Artificial Intelligence 41