Final Report - Old Dominion University
advertisement

Ankle Positioning and Loading Device
MAE 435
Advisors: Dr. Stacie Ringleb and Dr. Sebastian Bawab
Students: Marc DeAngelis, Paul Hauris, Katherine Leshkow and Jennifer Moore
Final Report
i
ABSTRACT
The ankle is a complicated joint, comprised of four bones, moving in three primary
motions. Because of the complexity of the ankle joint, it can be difficult for medical
personnel to analyze the ankle effectively. Current ankle loading devices are flawed in that
they test an unloaded ankle. The goal of the project is to improve upon past devices and
design a device that can analyze the ankle joint while under load, which is more
physiologic than existing devices. Four initial designs were developed, and using a design
matrix, were narrowed down to a single design. The dimensions of this design were
modified to account for an average-sized human foot.
The joint designs were also
modified in order to support the weight of the ankle and positioning device. Two small
scale models of the device were created using a 3D printer. A control algorithm was
developed to allow a clinician to manipulate the ankle positioning device via a hand-held
controller. By the end of the semester, the team assembled and demonstrated one of the
primary motions.
ii
TABLE OF CONTENTS
Abstract ............................................................................................................................................ i
Table Of Contents ........................................................................................................................... ii
List Of Figures ............................................................................................................................... iii
Introduction ..................................................................................................................................... 1
Methods........................................................................................................................................... 7
Conclusion .................................................................................................................................... 26
Appendix A – Design Matrix ........................................................................................................ 27
Appendix B – Gantt Chart ............................................................................................................ 28
Appendix C – Torque And Load Calculations ............................................................................. 29
Appendix D – Bill Of Materials.................................................................................................... 30
Appendix E - Matlab Code for Control Algorithm………………………………………..……..33
References ................................................................................................................................... 334
iii
LIST OF FIGURES
Figure 1 - Ankle Skeletal Structure [12] ........................................................................................................ 1
Figure 2 - Ankle Ligaments [5]..................................................................................................................... 2
Figure 3 - Anterior Ankle Drawer Test [13] ................................................................................................... 3
Figure 4 - Talar Tilt Test [14] ......................................................................................................................... 4
Figure 5 - Six DOF Ankle Device [13] ............................................................................................................. 5
Figure 6 - Moment Arm Device [9] ............................................................................................................... 6
Figure 7 - Pin Design .................................................................................................................................... 8
Figure 8 - Layered Design ............................................................................................................................ 9
Figure 9 - Framed Plate Design .................................................................................................................... 9
Figure 10 - Gimbal Design ......................................................................................................................... 10
Figure 11 - Modified Layered Design......................................................................................................... 11
Figure 12 – Finalized Midterm Design ....................................................................................................... 12
Figure 13- Motor Placement ....................................................................................................................... 13
Figure 15 – Redesigned Structure ............................................................................................................... 14
Figure 14 - ¼ Scale Model of Device ......................................................................................................... 14
Figure 16 – Final Project Design ................................................................................................................ 15
Figure 17 – ⅓ Scale Model ......................................................................................................................... 16
Figure 18 – Arduino Uno ............................................................................................................................ 17
Figure 19 – Hand-held Device .................................................................................................................... 17
Figure 20 – Setup for Control System ........................................................................................................ 18
Figure 21 – Results of Initial Control Algorithm for Y-Axis Rotation....................................................... 19
Figure 22– Generalized Schematic View of Circuit Design ....................................................................... 20
Figure 23– Generalized Breadboard View of Circuit Design ..................................................................... 21
Figure 24– Results of Modified Control Algorithm for Y-Axis Rotation .................................................. 21
Figure 25 – Results of Final Algorithm for Y-Axis Rotation ..................................................................... 22
Figure 26 – Joint for Y-Axis Rotation in Design ........................................................................................ 23
Figure 27 – Assembled Joint for Y-Axis Rotation ..................................................................................... 24
Figure 28 – Full Setup for Y-Axis Joint Demonstration ............................................................................. 25
Figure 29 – Graph Output of Demonstration .............................................................................................. 25
1
INTRODUCTION
The ankle joint is a complex joint comprised of two separate joints, the true ankle joint and the
subtalar joint [12]. The true ankle joint, or talocrural joint, consists of three bones, the tibia,
fibula, and talus [12]. The tibia and fibula are the long bones found in the lower leg leading down
to the ankle [2]. The tibia is found medially, or on the inside of the ankle joint, while the fibula is
found laterally, or on the outside of the ankle joint [12]. The talus is a wedge-shaped bone that
fits underneath the fibula and the tibia [2]. The subtalar joint is composed of two bones, the talus
and the calcaneus. The locations of the talus and calcaneus can be seen in Figure 1.
Figure 1 - Ankle Skeletal Structure [12]
The ankle and subtalar joints allow for the full range of motion observed by the ankle.
The full range of motion is made up of three sets of major motion: inversion/eversion, plantar
flexion/dorsiflexion, and internal/external rotation, sometimes referred to as abduction/adduction
[2]. Inversion and eversion are the rotation of the foot towards and away from the body,
respectively. In this case the foot is rotated so that the sole of the foot faces inward or outward.
This motion occurs with the subtalar joints. Plantar flexion and dorsiflexion involves the up and
down motion of the foot provided by the ankle joint [12]. Plantar flexion is observed with
pointing the foot downward while lifting the heel upwards [2]. Dorsiflexion occurs when the tip
2
of the foot is flexed upwards and the heel is extended downwards [2]. Adduction and abduction
are the rotation of the foot on a horizontal plane towards (internal rotation) and away (external
rotation) from the center of the body, respectively [10]. It is important to note that each of these
individual motions is considered an isolated movement. In the real world, however, isolated
movements in the joints are not common and instead what is more frequently observed is a
combination of the three major motions. To simplify the terminology, pronation involves the
abduction, eversion, and dorsiflexion of the ankle, while supination involves adduction,
inversion and plantar flexion of the ankle [2]. A secondary motion of the ankle joint is
translational motion, where the foot is able to slide forward and backward. Translational motion
occurs in the ankle when there is a loss of integrity in the ligaments around the joint. This can be
due to injury or a degenerative process in the ligaments [4].
Multiple muscular and ligament attachments connect the four bones of the true ankle and
subtalar joints [2]. Four ligaments support the ankle laterally and are known as the anterior
talofibular, the posterior talofibular, the anterior inferior tibiofibular, and the calcaneofibular
ligaments [2]. The talofibular ligaments connect the tibia to the fibula, while the calcaneofibular
ligaments attach the fibula to the calcaneus [12]. A group of ligaments collectively referred to as
the deltoid ligaments attach the tibia to the talus and calcaneus bones and is responsible for
medial support [12]. A diagram of the ligaments and their placement is displayed in Figure 2.
Figure 2 - Ankle Ligaments [5]
3
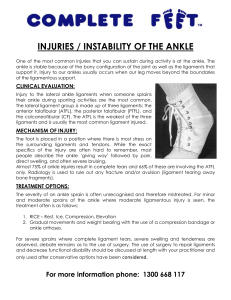
Many individuals roll or twist their ankles during daily activities. When this happens, ligaments
on the lateral aspect of the ankle, most commonly the anterior talofibular and the calcaneofibular
ligaments, may stretch and lead to an ankle sprain [8]. This can lead to a condition known as
chronic ankle instability. Chronic ankle instability is characterized by the tendency of the ankle
to invert while walking, running, or participating in a sport [3]. This is a result of the ligaments
in the ankle becoming weaker or even tearing due to a physical trauma and therefore not
providing the required support. Traditional diagnosis of ligament sprains and therefore possible
ankle instabilities includes the anterior/posterior anterior drawer test and the Talar Tilt test. The
physician performs the anterior drawer test by firmly holding the tibia in place. The physician
then either pulls (for anterior drawer test) or pushes (for posterior drawer test) the ankle in the
horizontal direction (See Figure 3). If there is abnormal motion, or laxity, then the ligament
being tested is not supplying the required support and could be torn or injured. The anterior
talofibular ligament is tested by the anterior drawer test while the posterior talofibular ligament is
tested by the posterior drawer test [7]. The calcaneofibular ligament is tested using the talar tilt
test. The talar tilt test is performed by tilting the heel inward while holding the tibia in place (See
Figure 4). Excessive tilt is a sign of a possible sprain of the calcaneofibular ligament [14].
Figure 3 - Anterior Ankle Drawer Test [13]
4
Figure 4 - Talar Tilt Test [14]
These tests involve the physician physically moving the patient’s ankle to assess the
severity of the injury. It is up to the physician to determine whether the patient has passed or
failed the test. In order to more accurately diagnose ankle instability, it is essential to be able to
accurately model the dynamics of the ankle. In order to do this, many scientists and engineers
have developed devices that allow the ankle to move in the full range of motion while data is
collected. Many of these devices operate the ankle in the open kinetic chain. In the open kinetic
chain, the end of a limb (e.g. the ankle) is free to move and is not met with a large resistance [6].
One such device can be seen in Figure 5. The device shown is a six degree of freedom (DOF)
device that was used to study the 3-dimensional mechanical characteristics of the ankle and
subtalar joint [13]. The ankle can be manually moved and locked into position with a desired
loading and then placed in an MR scanner. The scanner then creates an image of the internal
structure of the ankle in its loaded configuration. As a result of the magnetic field from the MR
scanner, the ankle and device have to be moved out of the room containing the MR scanner in
5
order for adjustments and other measurements to be made. The device also requires that the
ankle be fixed in a certain configuration and then an image can be taken. This device works well
for acquiring data for specific positioning of the ankle, but the ankle needs to be observed in
motion in order to accurately model its dynamics. For this reason, this project will create a
device capable of automated motion that will be observed with a motion capture system. The
automation will allow for dynamic position anywhere in the ankle’s range of motion as well as
more dynamic loading scenarios.
Figure 5 - Six DOF Ankle Device [13]
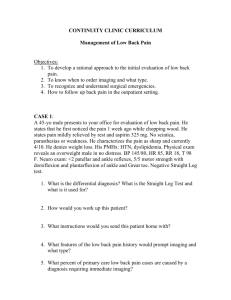
The device pictured in Figure 6 is a motorized device that was used to assist in
calculating the moment arm of muscles that contribute to the motion of the ankle [9]. Due to the
design of the device, parts of the device inhibited the motion of the ankle, particularly during
inversion and eversion. As a result the full range of motion could not be achieved.
6
Figure 6 - Moment Arm Device [9]
The above devices operated as open kinetic chain devices. However, the ankle is
naturally under the weight of the body and is constantly constrained by the ground during
walking and the majority of functional motions. Pain is normally felt when body weight is
applied in every day walking or standing. Because the ankle naturally operates under these
conditions, the closed kinetic chain needs to be simulated as closely as possible in order to
accurately model the motion of the ankle and its constituent parts. In the closed kinetic chain, the
distal end is fixed and is met with a large resistance [6]. The purpose of this project was to
design such a device. The device will be capable of loading and positioning the ankle in the
closed kinetic chain so that the dynamics of the ankle can be realistically analyzed. The device
will move in five DOF with constant loading to mimic the weight of a human being. The five
DOF of the ankle loading and positioning device will allow the ankle to move in its natural range
with the added capability of conducting both the Ankle Drawer Test and Talar Tilt Test. The
goal of the device is to mimic the natural state of the ankle so that accurate data acquisition can
be administered.
7
METHODS
The team had several goals for the initial conceptual designs: create a device which would be
user-friendly in a clinical setting, design for both isolated and combined motions, design a device
which would allow for five DOF and create as simple a design as possible while incorporating all
of the aforementioned goals. The five DOF are: plantar flexion/dorsiflexion, abductor/adductor,
eversion/inversion, horizontal translation and vertical translation. Incorporating these criteria
into the design would allow a clinician to test for ankle instability in not only a weighted setting,
but also in all possible ranges of motion.
The first 4 DOF are due to the ankle joint's rotational and drawer movements. The 5 th DOF is
vertical translation. Unlike the first four DOF, vertical translation will not be directly controlled
by either automated or manual direction. Instead, the 5th DOF results from the ankle’s natural
movement through the other DOF. For example, as the ankle rotates from a flat position into
plantar flexion, the heel naturally moves upward. This upward motion is the 5th DOF. If the
design included a direct, or forced, control of vertical translation, the result would be binding in
the ankle.
Using the set criteria, each team member brainstormed a design. These designs were created
using Inventor (Autodesk, San Rafael, CA) and named the pin (Figure 7), layered (Figure 8),
framed plate (Figure 9) and gimbal (Figure 10). The pin design (Figure 7), allowed for easy
manipulation of every DOF except vertical translation. Although its disadvantages include large
amounts of machining and being the least user-friendly of the four initial designs, this design
gave way to a series of beneficial design ideas and improvements.
8
Figure 7 - Pin Design
The layered design concept (Figure 8) allows for an easier, servo motor and gyroscope driven
device. It accounts for all degrees of freedom except for horizontal and vertical translation.
9
Unlike the previous pin design, this design requires a significant reduction in materials and
machining time. It also provides a simplification of user operation.
Figure 8 - Layered Design
Figure 9 - Framed Plate Design
The framed plate concept (Figure 9) provides the same degrees of freedom as the layered design,
but places the axes of rotation at the midpoints of the upper surfaces. This design allows for an
10
easier placement of the foot on the plate, but requires greater strength of materials along the axes
of rotation. This variation of the layered design also utilizes servo motors. The framed plates
and layered designs were the simplest of the four designs.
The gimbal design (Figure 10) concept built upon all of the previous designs. It allowed for all
five degrees of freedom with the gimbal located on the translational base. As with the pin
design, it would require large amounts of machining, materials, and user instruction. Also,
horizontal translation using this design would be extremely limited.
Figure 10 - Gimbal Design
Using the aforementioned criteria, in addition to cost, reliability, and power consumption, the
team created a Design Matrix (Appendix A). Given the project's purpose, the team decided that
being user-friendly and incorporating all five DOF would be the most important design criteria.
After evaluating the Design Matrix, the layered design concept was chosen as the preliminary
ankle loading device design. As shown in Figure 11, modifications were made to account for
clamping and supporting the tibia, as well as tightening the range of possible error. The original
layered design had its axes of rotation offset from each other as well as from the central, vertical
axis of the complete device. This modified design places the centers of rotation in coincident
locations along the central vertical axis of the device. The additional columns located on the
11
outside of the base provide for a location to fasten the tibia once final designs for the clamp are
created.
Figure 11 - Modified Layered Design
Further modifications were made to the design to include necessary additions such as the fourth
degree of freedom, the finalized tibia clamp, three motors, and the load cell. The finalized
midterm design can be seen in Figure 11. The fourth degree of freedom modification was added
to allow for the horizontal translation seen in the ankle joint. This was done by adding a base
plate with tracks to the design. Steel balls ride in the tracks, allowing the entire design to slide in
one direction. The fourth DOF will be operated manually.
A clamp was incorporated to secure the tibia of the tested ankle. The clamp can be adjusted,
allowing for a range of leg sizes to be secured to the device. The clamp design used was a
modified version of a design originally developed at Old Dominion University for a knee
positioning device. A load cell was also added to the design at the base of the foot plate, so as to
measure the forces applied by the foot onto the plate at each position for data collection during
clinical testing. The joints for each level were also modified so as not to bind the device as each
plate rotates.
12
Figure 12 – Finalized Midterm Design
The finalized midterm design met several quantitative requirements. Following the preliminary
research, it was found that the average high for the global range of foot lengths is 12 inches [11].
Taking deviations from this obtained result into account, the foot length that will be allowed for
is 14 inches.
A motor was selected to allow for over 210 pounds/inch torque in each servo motor used to
control the individual joints. Three motors were purchased for the model. The placement for
each motor is shown in Figure 13. The lowest motor will allow for rotation about the z-axis or
internal/external rotation. The second motor will allow for rotation about the y-axis or plantar
flexion/dorsiflexion. This motor will sustain the maximum torque, 173.6 pounds/in, giving the
device a factor of safety of 1.22. Full calculations for the maximum torque can be found in
Appendix C. Lastly, the top motor will allow for rotation about the x-axis or inversion/eversion.
13
The finalized midterm design also met the initial goal of 5 DOF. A vertical track was added
which will allow the tibia to move upwards and downwards as the ankle is manipulated through
the first four DOF.
Figure 13- Motor Placement
After finishing modifications, the team created a ¼-scale model of the device. This model was
created using a 3D printer and ASV plastic.
dimensions 6.25” H x 6.0” L x 4.5” W.
The model, pictured in Figure 14, had the
14
Figure 14 - ¼ Scale Model of Device
This model allowed the team to search for any remaining design flaws. While the first 3DOF
(inversion/eversion, plantar flexion/dorsiflexion and internal/external rotation) functioned
properly, the 4th DOF– horizontal translation, and the support structure required remodeling.
The model showed the team that the support structure designed for loading and holding the tibia
was weak and had the potential of bending or breaking over time. The team decided on a design
that was simple to machine and would not block the camera view used to analyze the ankle under
loads. This design is shown in Figure 15.
Figure 15 – Redesigned Structure
15
The design included a new support with thicker rods of aluminum that were less likely to bend
under a load. The support's connection to the base of the device was also strengthened by adding
triangular braces to all four sides of each support.
The ¼ scale model also brought to the team's attention that the finalized midterm design would
lead to binding of the ankle when the ankle moves through inversion and eversion. While the
joint used to control the movement was sufficient, the ankle will indirectly move the foot
horizontally side to side. In addition, the original track design was also deemed to be too
cumbersome.
In order to correct both flaws, a new design for translational motion was
conceptualized. Instead of steel balls riding in cut out tracks, the team found V-tracks that fit
with carriages and would be more efficient for the required translational motions. In order to
create the two perpendicular translational motions, the tracks were stacked on top of one another
so as to layer their effects. The updated design is shown below in Figure 16.
Figure 16 – Final Project Design
16
After design modifications were made, a second 3D model was completed with the new
additions. This model was made to ⅓ scale and measured 12" x 12" x approximately 10.5". This
model will help to identify any remaining design flaws before final production. The ⅓ scale
model is displayed below in Figure 17.
Figure 17 – ⅓ Scale Model
As previously mentioned, another team goal was to create a control algorithm that would allow a
user to manipulate the position of an ankle using a hand-held device. As the hand-held device
rotates about the x-axis, the ankle should rotate about the x-axis or, through inversion/eversion.
Similar motions should be produced with y-axis rotation (plantar flexion/dorsiflexion) and z-axis
rotation (internal/external rotation). The device should allow for a maximum rotation of 45° in
any one direction. This will allow a technician to observe a large range of motion without
manipulating an ankle through unrealistic positions.
17
The control system was created using a hobby servo, Matlab (The Mathworks, Natick,
Massachusetts), an Arduino Uno (Arduino, Italy) shown in Figure 18, a 6-axis inertial
measurement unit (IMU), a breadboard, and connecting wires. The hand-held device was made
up of the IMU and breadboard, as can be seen in Figure 19. The physical setup for the control
system is shown in Figure 20.
Figure 18 – Arduino Uno
Figure 19 – Hand-held Device
18
Figure 20 – Setup for Control System
To create the control algorithm, the team’s first concern was to convert the IMU’s readout into a
useable measurement of rotation. The servos used to test the algorithm recognize a 0°-180°
rotation. Therefore, the team had to select a suitable neutral position. The neutral position had
to be chosen such that the rotation in one direction would not cause an error. For example,
setting the neutral position to 0° with a maximum rotation of 45° in each direction would create a
rotation from -45° to 45°. Since the servos only recognize 0°-180°, the rotation from -45° to 0°
would cause the device to malfunction. Considering this limitation, the team set the neutral
position to 90°. Therefore, the ideal rotation ranges from 45° to 135°.
The team first designed an automated control for rotation about the y-axis. As previously
mentioned, the initial concern was to convert the IMU’s readout into a useable measurement of
rotation. With this in mind, the control system initially omitted the servos. Also, the initial
control algorithm only allowed for a 30° rotation in each direction for a 60° - 120° range of
rotation. The results of the team’s initial design are illustrated in Figure 21. As can be seen in
the figure, the actual neutral position was 91° and the rotation ranged from 58° (plantar flexion)
to 122° (dorsiflexion).
19
Figure 21 – Results of Initial Control Algorithm for Y-Axis Rotation
After achieving this viable output, the team incorporated a servo into the circuit system and
changed the maximum rotation to 45° for a total ideal rotation of 45° to 135°. The generalized
schematic and breadboard views of the final control algorithm’s circuit can be seen in Figures 22
and 23, respectively. These illustrations were created using Fritzing (Interaction Design Lab,
Germany).
20
Figure 22– Generalized Schematic View of Circuit Design
21
Figure 23– Generalized Breadboard View of Circuit Design
Figure 24– Results of Modified Control Algorithm for Y-Axis Rotation
22
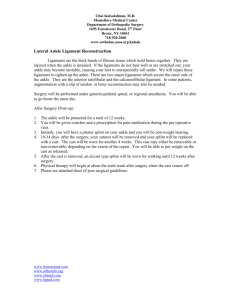
The team then tested the updated control system. The results can be seen in Figure 24. The
actual neutral position was 91°. When the hand-held device was moved into dorsiflexion the
resulting position was 136°. As the hand-held device was shifted back to the neutral position the
readout returned to 91°. When the hand-held device was moved into plantar flexion the resulting
position was 48°. Lastly, as the hand-held device was returned to the neutral position, the
readout again returned to 91°. This test gave an overall range of 48°-136° with a neutral position
at 91°. This is an approximate match to the team’s goal of a 45° to 135° range with a neutral
position at 90°. As Figure 23 shows, however, introducing the servo into the control system
added significant noise. To reduce the noise, the team implemented a 2nd-order Low Pass
Butterworth Filter. This filter significantly reduced the noise, as shown in Figure 25.
Figure 25 – Results of Final Algorithm for Y-Axis Rotation
Finally, calculations were completed to ensure that the design was able to support a 50 pound
load applied to the foot plate, which can be seen in Appendix C. Materials used in the final
design were compiled and priced. This included raw materials (such as aluminum sheets),
manufactured materials (such as translational tracks and carriages), control items (such as
23
gyroscope, and microcontroller), servo motor items, and a power supply. The bill of materials
can be seen in Appendix D. The estimated final cost of the project is $2,895.01.
The materials and control items orders were approved by the team’s advisors and submitted to
Diane Mitchell. After materials were received by the team, materials were sent to the Old
Dominion University machine shop for fabrication.
After receiving the parts from the machine shop, the team prepared a demonstration of the
design. For this demonstration, the team focused on the middle –or y-axis rotation–joint seen in
Figure 26.
Figure 26 – Joint for Y-Axis Rotation in Design
During the joint assembly, the team realized that the fillet welds used in the joint had not been
accounted for in the design. To fix this oversight, the team decided to mount the motor to the
horizontal plate instead of the vertical plate. In addition, the entire vertical plate was removed
from the design. The joint was sent back to the machine shop and re-machined to reflect these
changes. The final assembled joint can be seen in Figure 27.
24
Figure 27 – Assembled Joint for Y-Axis Rotation
After assembly, the team first tested the motor to make sure it would read inputs from the
computer. To do this, the team connected the motor to the Arduino and the Arduino to a
computer. While the team achieved acceptable outputs, when the device was instructed to turn
to the neutral position, 90°, the actual position of the device was 100°. To correct this, the team
sent the 90° command, disconnected the device, physically set the device to 90°, and reconnected
the device.
The team then incorporated the IMU into the circuit. Including this device will allow a clinician
to manipulate the positions of the ankle via a hand-held controller. The team also added a power
supply to the circuit. The entire circuit setup can be seen in Figure 28.
25
Figure 28 – Full Setup for Y-Axis Joint Demonstration
For the demonstration, the team modified the control algorithm to only allow for a maximum
rotation of 30° in each direction. During the demonstration, one team member rotated the handheld controller into the neutral, dorsiflexion, and plantar flexion positions while another recorded
the demonstration on video. The graphical output of the demonstration is shown in Figure 29.
Figure 29 – Graph Output of Demonstration
26
CONCLUSION
The team was presented with designing an ankle loading device. The device needed to be userfriendly and incorporate five DOF. With these criteria, each team member brainstormed a
design. The team created a design matrix and chose a preliminary device design. This design
was improved upon and met several requirements, including the ability to support a 50 pound
load and contain a load cell.
A final design implemented a working control algorithm, a
redesigned 4th DOF and redesigned structural support. The team compiled a bill of materials
which was approved by the team’s advisors. After receiving all of the parts from the machine
shop the team assembled the y-axis rotation – or middle – joint in the Old Dominion University
Smart Systems Laboratory. After assembly, the team tested and filmed a demonstration of the
working joint. The team also created a 3D print of the final project design using a 1/3 scale.
Further modifications and work will be continued by a future senior design team.
27
Designs
APPENDIX A – DESIGN MATRIX
Design Criteria
Cost
Reliability
User
Friendly
Allows for DOF
Design Simplicity
Least Power
Consumption
Sum
(Weighting
Factor)
(17)
(14)
(11)
(30)
(20)
(8)
Layered
90/ 15.3
N/A
100 / 11
60 / 18
100 / 20
90 / 7.2
71.5
Pin
70/ 11.9
N/A
70 / 7.7
80 / 24
70 / 14
50 / 4
61.6
Gimbal
70/ 11.9
N/A
80 / 8.8
80 / 24
80 / 16
70 / 5.6
66.3
Framed Plates
90/ 15.3
N/A
90 / 9.9
60 /18
100 / 20
90 / 7.2
70.4
28
APPENDIX B – GANTT CHART
29
APPENDIX C – TORQUE AND LOAD CALCULATIONS
4.303
inches
4.303sin(35) = 2.47 inches
Torque from 50 lb weight with a rotation of 40 degrees from vertical:
𝑇 = 50 ∗ 2.47 = 123.4 𝑙𝑏 ∗ 𝑖𝑛
Weight of device contributing to torque: 15 lbs moment arm is 1.5 inches
Weight of Cadaver leg: 10 lbs moment arm is 2.77 inches
Therefore total torque:
𝑇 = 123.4 + 15 ∗ 1.5 + 10 ∗ 2.77= 173.6 lb*in
Maximum allowable: Tfs = 212 lb*in
212
𝑓. 𝑠 = 173.6 = 1.22
30
APPENDIX D – BILL OF MATERIALS
ID #
Parts
Size
1
1/2" thick Al
Base 1 (bottom)
36" x 24"
2
Lower Track Backing
3
Upper Track Backing
4
Quantity
Price Each
Total Price
1
$ 720.49 (for one 48" x 48" plate)
$
720.49
13" x 2
2
Covered in above plate
12 x 2.5"
2
Covered in above plate
Lower Carriage Backing
10.9" x 1"
2
Covered in above plate
5
Upper Carriage Backing
1.5" x 12"
2
Covered in above plate
6
Base 2 (second level)
9.9" x 12"
1
Covered in above plate
7
Base 3 (third level)
12" x 7"
1
Covered in above plate
8
Horizontal Clamp Plate
8" x 24"
1
Covered in above plate
9
Vertical Clamp Plates
3.5" x 2.5"
2
Covered in above plate
10
Vertical Bearing Plates
8"x 2.781"
2
Covered in above plate
$
63.19
$
57.76
3/16" thick Al (MSC sells 0.19")
11
Stablizer Triangles
4" x 8"
8
$ 63.19 (for one 24" x 24" plate)
12
Base 3 (attached to 1st Servo)
3" x 3.5"
1
Covered in above plate
13
1st Tier Plate
3" x 4"
1
Covered in above plate
14
Joint Pentagons
3" x 1.53"
6
Covered in above plate
15
Vertical Tier Plates
2.688"x 3"
2
Covered in above plate
16
2nd Tier Plate Horizontal
8.5" x 3"
1
Covered in above plate
17
Load Cell Plate
5" x 6.282"
1
Covered in above plate
18
Top Plate
5" x 14"
1
Covered in above plate
19
Backward Brace
1.5" x 2"
2
Covered in above plate
20
Forward Brace (vertical)
1" x 4.688"
2
Covered in above plate
21
Forward Brace (across)
1" x 5"
1
Covered in above plate
12"
1
$
Al tubing (OD=5, ID=4.5)
Clamp Material
57.76
31
APPENDIX D – BILL OF MATERIALS CONTINUED
1/2" Diam Rod
Rods over 1st servo
2.875 "
4
$
6.29 for 12" rod
$
6.29
3"
2
$
12.78 for 12" rod
$
12.78
3.75"
2
$
3.33
$
6.66
3
$
239.98
$
719.94
3
$
4.49
$
13.47
1 1/2" Diam Rod
Clamp Rods
3/4" Diam Bolt
Clamp
Servo Items
Servo 7:1 Ratio
Channel
3 3/4"
0.770 Hub
1/2"
8
$
7.99
$
63.92
6-32 Screws into servo
1/8"
18
$
4. 08 or 24 pack
$
4.08
6-32 Screws mounting channel
7/16"
12
$
0.07
$
0.84
8
$
0.09
$
0.72
6-32 Nuts for mounting
1/2" Diameter Shaft
3"
2
$
5.50
$
11.00
1/2" Diameter Shaft
2"
1
$
5.25
$
5.25
5
$
6.99
$
34.95
8
$
58.33
$
466.64
4
$
27.48
$
109.92
1.5" bore flat bearing mount
Horizontal Translations
Translation Carriages
Translation Tracks
10-32 screws (Trans Tracks)
10-32 nuts (Trans Tracks)
1/4"-28 Screws (Carriage)
12"
1" long
.75" long
1 pack (25)
$
6.39
1 pack (100)
1 pack (100)
$
$
1.71
9.68
$
6.39
$
1.71
$
9.68
32
APPENDIX D – BILL OF MATERIALS CONTINUED
Vertical Translation
Vertical Bearings
1"
2
$
92.88
$
185.76
Vertical Support Shafts
1"x22"
2
$
56.77
$
113.54
Square Vertical Bars
1.5"x1.5"x36"
1
$
51.99
$
51.99
Arduino Uno- R3 SMD
$
29.95
$
29.95
Acc_Gyro 6DOF Analog IMU (with soldered headers)
Mean Well 7.5v 20A
$
$
72.50
100.28
$
$
72.50
100.28
USB Cable
$
3.95
$
3.95
Control and Power
Shipping
McMasters'
Shipping not
calculated at
check out.
Servo City (flat rate 3-5 days)
$
6.99
Sparkfun
$
4.43
Starlino
$
4.95
Mouser
$
4.99
Total
$ 2,895.01
33
APPENDIX E – MATLAB CODE FOR CONTROL ALGORITHM
clear Ax dataold datanew t i Rot Rotnew x y
close all
clc
a = arduino('com3');
Vref = 3.3;
VzeroAx = 1.110;
pinAx = 14; %Pin A0 on Arduino Uno
pinServo1 = 3;
accsense = .4785;
i = 1;
t = 0;
dataold = 0;
a.pinMode(pinAx,'input');
a.servoAttach(pinServo1);
Axgraph = line([0],[0]);
ylim([40 160])
while t < 10000
datanew(i) = dataold;
Ax(i) = (a.analogRead(pinAx)*Vref/1023 - VzeroAx);
Rot(i) =acosd(Ax(i));
x(i) = 3*cosd(Rot(i));
y(i) = sind(Rot(i));
Rotnew(i) = round(atand(x(i)/y(i))+90)
[B A] = butter(2,0.02);
x = round(filter(B,A,Rotnew));
if datanew(i)>70
a.servoWrite(pinServo1,x(i))
end
set(Axgraph,'xdata',[datanew],'ydata',[x])
dataold = dataold + 1;
i = i+1;
t = t+1;
pause(0.02)
end
34
REFERENCES
[1] C. Chiodo. Ankle Sprains [Online]. Available:
http://www.drchiodo.com/Pages/disorders/ankle_sprains.php. [December 4, 2012]
[2] C. Logan. "The Ankle Joint." Internet: http://www.ideafit.com/fitness-library/ankle-jointanatomy , Jun. 2005 [Dec 1, 2012].
[3] (2009, December 18). Chronic Ankle Instability [Online]. Available:
http.//www.foothealthfascts.org [December 1, 2012]
[4] D. Richie Jr. "The Biomechanics of Ankle-Foot Orthoses." Internet:
http://www.podiatrym.com/cme/Sep09CME.pdf, Sep 2009 [Dec. 4, 2012]
[5] eOrthopod. "A Patient's Guide to Ankle Anatomy." Internet:
http://www.eorthopod.com/content/ankle-anatomy, 2011 [Dec. 5, 2012]
[6] Eric Troy. (2012, October 25). The Kinetic Chain: Open Versus Closed [Online]. Available:
http://www.gustrength.com [December 1, 2012]
[7] J.Bernstein, Ged Wieschhoff, et al. (2010, April 16). Ankle Anterior Drawer [Online].
Available: http://www.orthopaedicsone.com/x/CAD5AQ. [December 4, 2012]
[8] J. Hansen, “Lower limb” in Netter’s Clinical Anatomy, 2nd ed. Philadelphia: Saunders
Elsevier, 2010.
[9] Matthew B.A. McCullough, PhD; Stacie I. Ringleb, PhD; Kenichiro Arai, MD. “Moment
Arms of the Ankle Throughout the Range of Motion in Three Planes.” Foot and Ankle
International 32.3 (2011): 300-306
[10] Northcoast Footcare. "Biomechanics." Internet:
http://www.northcoastfootcare.com/pages/Biomechanics.html, Jun. 28 2010 [Dec 2, 2012].
[11] “Shoe Size Averages.” Internet: http://www.statisticbrain.com/shoe-size-averages/, June 20,
2012 [Oct. 08, 2012].
[12] Southern California Orthopedic Institute. "Anatomy of the Ankle." Internet:
http://www.scoi.com/ankle.php, 2012 [Dec. 1, 2012].
[13] S. Siegler, J.K. Udupa, S.I. Ringleb. “Mechanics of the ankle and subtalar joints revealed
through a 3D quasi-static stress MRI technique.” Journal of Biomechanics 38.3 (2005): 567-578