2. power source

Control of Seam Welding for an Axle Housing
Using Programmable Logic Controller
Harsha B V 1 & K R Prakash 2
1 Department of Industrial Automation Engineering, VTU-RO, Mysore, Karnataka, India
2 Department of Mechanical Engineering, National Institute of Engineering, Mysore, Karnataka, India
E-mail : harshabve@gmail.com
1 , prakash_kupparavalli@yahoo.com
2
Abstract – The present work briefs about improving the welding of axle housing. The process for seam welding of axle housing was observed and controlled by using programmable logical controller (PLC), which results in control of welding process variables such as the penetration, bead reinforcement, bead width and the deposition rate, welding current, welding voltage, travel speed, wire electrode size, type of shielding gas, electrode extension, electrode angle, weld joint position. Mainly this paper explains the control of voltage and current automatically using PLC ladder logic control, which reduces the operator work of repetitive adjustments of the process parameter on seam welding machine, resulting in higher quality of weld, increased productivity and reduced skill requirement and rework.
Keywords – welding voltage, welding current, seam welding,
PLC, Axle housing
Fig 1:axle housing ready to seam weld
II. W ELDING P ROCESS
I. I NTRODUCTION
An axle is a pin or shaft on or with which a wheel or pair of wheels revolves. An axle is a central shaft for a rotating wheel or gear. On wheeled vehicles, the axle may be fixed to the wheels, rotating with them, or fixed to its surroundings, with the wheels rotating around the axle. On cars and trucks, several senses of the word
"Tandem axle" co-occur in casual usage, referring to the shaft itself, its housing, or simply any transverse pair of wheels. The shaft itself rotates with the wheel, being either bolted or splined in fixed relation to it, and is called an "axle" or "axle shaft". However, it is equally true that the housing around it (typically a casting) is also called an "axle" (or "axle housing"). An even broader (somewhat figurative) sense of the word refers to every transverse pair of wheels, whether they are connected to each other or not. Thus even transverse pairs of wheels in an independent suspension are usually called "an axle". Figure 1 shows axle housing ready for seam weld process.
MIG (Metal Inert Gas) welding, also known as
MAG (Metal Active Gas) and in the USA as GMAW
(Gas Metal Arc Welding), is a welding process that is now widely used for welding a variety of materials, ferrous and non-ferrous. The essential feature of the process is the small diameter electrode wire, which is fed continuously into the arc from a coil. As a result this process can produce quick and neat welds over a wide range of joints.
Fig 2: Seam Weld Setup
ISSN (Print): 2321-5747, Volume-1, Issue-2, 2013
1
International Journal on Mechanical Engineering and Robotics (IJMER)
1. Equipment
DC output power source
Wire feed unit
Torch
Work return welding lead
Shielding gas supply, (normally from cylinder)
Power Source-MIG welding is carried out on DC electrode (welding wire) positive polarity (DCEP).
However DCEN is used (for higher burn off rate) with certain self-shielding and gas shield cored wires. DC output power sources are of a transformer-rectifier design, with a flat characteristic (constant voltage power source). The most common type of power source used for this process is the switched primary transformer rectifier with constant voltage characteristics from both
3-phase 415V and 1-phase 240V input supplies.
The output of direct current after full wave rectification from a 3-phase machine is very smooth. To obtain smooth output after full wave rectification with a
1-phase machine, a large capacitor bank across the output is required. Because of the expense of this, many low cost 1-phase machines omit this component and therefore provide a poorer weld characteristic. The switches to the main transformer primary winding provide the output voltage steps at the power source output terminals.
Fig 4: Volt-amp curve of a typical constant voltage power source
Most MIG power sources have a contactor or relay used to switch the output ON/OFF with operations of the trigger on the MIG torch. The switch off operation of this contactor is normally delayed to allow the welding wire to Burn back out of the molten weld pool. A thermostat is fitted on the hottest point in the power source, in series with the contactor coil to provide thermal protection to the machine. Power source performance is measured by its ability to provide a certain current for a percentage of a 10 minute period before “Thermal Cut-Out”. This is the “Duty Cycle”. \
Fig 5: CV Transformer rectifier power source for
GMAW
Fig 3: Volt-amp curve of a typical constant current power source
Another method of producing different voltages at the power source output terminals is to use a Thyristor or a
Transistor rectifier instead of a simple diode rectifier.
This system offers continuously variable output voltage, which can be particularly useful on robot installations and the cost of this type of rectifier can be partly offset with no need for primary voltage switch or switches and a single tapped main transformer primary winding.
2
ISSN (Print): 2321-5747, Volume-1, Issue-2, 2013
International Journal on Mechanical Engineering and Robotics (IJMER)
Fig 6: principal of rectification of alternating current
2. Welding Current
The value of welding current used in MIG has the greatest effect on the deposition rate, the weld bead size, shape and the penetration. In MIG welding, metals are generally welded with direct current polarity electrode positive (DCEP, opposite to TIG welding), because it provides the maximum heat input to the work and therefore a relatively deep penetration can be obtained.
The oxide removal effect of the DCEP, which is very important in the welding of aluminium and magnesium alloys, contributes to clean the weld deposit. When all the other welding parameters are held constant, increasing the current will increase the depth and the width of the weld penetration and the size of the weld bead. In a constant voltage system, the wire feed speed and welding current are controlled by the same knob. As the wire feed speed is increased the welding current also increases, resulting in increases in the wire melt-off rate and the rate of deposition. Each electrode wire size and type has a minimum and maximum current range to give the best results. An excessively low welding current for a given electrode size produces a poor penetration and the pileup of the weld metal on the surface of the base metal transfer by the arc is sluggish, the bead is rough and reinforcement high.
If the current is too high, the size of the weld bead is large and the excessive deep penetration that wastes the filler metal causes burn-through and undercut. Too high or too low welding current also affects the mechanical properties of the weld metal and the tensile strength. The ductility is reduced and porosity, excessive oxides and impurities can be seen in the weld metal.
3. Welding Voltage (Arc Length)
The arc length is one of the most important variables in MIG that must be held under control. When
3 all the variables such as the electrode composition and sizes, the type of shielding gas and the welding technique are held constant, the arc length is directly related to the arc voltage. For example, normal arc voltage in carbon dioxide and helium is much higher than those obtained in argon. A long arc length disturbs the gas shield, the arc tends to wander and thus affects the bead surface of the bead and the penetration. In MIG the arc voltage has a decided effect upon the penetration, the bead reinforcement and bead width. By increasing the arc voltage the weld bead becomes flatter and wider, the penetration increases until an optimum value of the voltage is reached, at which time it begins to decrease. High and low voltages cause an unstable arc. Excessive voltage causes the formation of excessive spatter and porosity, in fillet welds it increases undercut and produces concave fillet welds subject to cracking.
Low voltage produces narrower beads with greater convexity (high crown), but an excessive low voltage may cause porosity and overlapping at the edges of the weld bead.
4. Welding Positions
In application, there are only four basic welding positions. Often, welding must be done on the ceiling, in the corner, or on the floor. In view of this, some techniques were developed to allow welding in any position. Different welding positions are:
A. Flat position: In this position, the filler metal is deposited from the upper side of the joint and the face of the weld is approximately horizontal. In welding terminology this is also called the down-hand position for both groove welds and fillet welds.
B. Horizontal position: The position of welding in which the weld is performed on the upper side on a horizontal surface and against an approximately vertical surface.
C. Overhead position: The weld is deposited from the underside of the joint and the face of the weld is horizontal.
D. Vertical position: The weld axis is approximately vertical. The welding direction can be changed up and down.
Welding in the flat position is the simplest technique and the most convenient. The highest deposition rates can be provided and it can be adapted easily to mechanised or automated welding techniques.
In these positions, the most difficult position is the overhead that needs special skills for the welding application. In industrial applications the manipulators and positioners have been developed and used for holding a joint in as flat a position as possible.
ISSN (Print): 2321-5747, Volume-1, Issue-2, 2013
International Journal on Mechanical Engineering and Robotics (IJMER)
In the present paper we discuss about horizontal position welding only as shown in the figure 3.
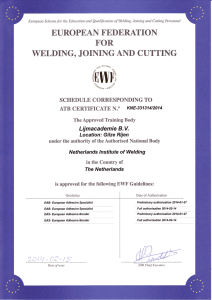
Fig 7: axle house mounted horizontally for seam welding
III. P ROBLEM D EFINITION
Axle housing is welded using computer numerical control (CNC) machine (fig. 7). The axle housing is welded by gas welding with the mixture of CO2+Argon
(20%+80%). seam welding relies on electrodes, usually made from copper, to apply pressure and current.
Transformer supplies energy to the weld joint in the form of low voltage, high current AC power. Parameters settings like voltage and current are controlled by CNC machine. The axle house is divided into zones say 3 to
5, according to the length of the axle housing, each zone will have different voltage and current. The CNC and other machine details are as follows:
1. CUSTOM SCREEN
Custom screen is where we enter the required limits for current and voltage for respective zones.
4
2. POWER SOURCE
DELTAWELD (MODEL 450A) Specification:
Rated welding output- 450A at 38 volts DC, 100% duty cycle
Voltage range DC- 10 to 38
Max. OCV DC- 44
IP Rating- 21M
3. CNC
A. 6 digital servo drives (plus and pro versions).
B. 4 digital servo drives (value version).
C. One additional positioning axis (plus and pro versions).
D. A bipolar or a unipolar analog spindle can be used.
E. RS 232 C interface.
F. Ethernet on board (pro version).
G. Pre-assigned machine data.
H. Sample program and PLC library included in scope of supply.
I. Very user-friendly PLC (SIMATIC S7-200) with ladder programming.
J. 216 digital inputs and 144 digital outputs (0.25 A).
K. User interface with cycle support for T/M and G versions (external cylindrical).
The current required while welding the ends are to be adjusted to a higher value compared to other zones where simple welds are made. In the first and last zones of both right hand and left hand, the weld has to be carried out with higher current and lower voltage to get a better penetration and a strong weldment with the supporting plate of copper, whereas the remaining zones requires less current high voltage to put a proper tagging between the two axle housing. This change in current and voltage values has two axle housing. This change in current and voltage values has to be made automatically in order to avoid inaccuracy of weld and to improve the quality of the product.
The operator was monitoring the voltage and current values in each region and adjusts manually through continuous monitoring process. This was resulting in fatigue on labour and causes higher rejections or rework in the subsequent stages. To avoid this, in the present proposal the system is improved by incorporating a PLC to monitor the process and automatically adjust the values according to the requirement to meet the desired specification. Even
ISSN (Print): 2321-5747, Volume-1, Issue-2, 2013
International Journal on Mechanical Engineering and Robotics (IJMER) though weld parameters (voltage and current) are set by potentiometers of each zone in the present CNC machine, it is disturbing at frequent intervals so, the pot control method is not suitable for high accuracy welding line. Considering the above project work proposed, will attend to all the necessary modifications in the machine to convert the machine completely automatic. This will helps in improving the quality of the component by reducing the errors/effects which are occurring presently due to the fluctuation of voltage and current, some welding conditions and their effects observed on welding are as in table 1.
Table 1: Welding Variables and Their Influence.
Welding
Condition
Current excess optimum
Current in of less than optimum
Main Effects
Excess spatter. Flat wide deposit.
Deep crater. Deep penetration.
Electrode overheats.
Slag difficult to control. Metal piles up. Poor dead shape. Poor penetration.
Voltage excess optimum in of
Voltage less than optimum
Deposit irregular and flat. Arcs wander. Porosity. Spatter.
Irregular piling of weld metal. Arc extinctions. Little penetration.
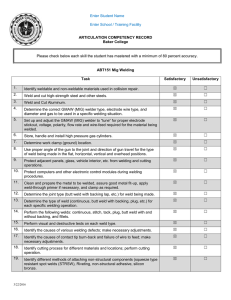
(a)
(c)
Fig 8: Defects in welded part
IV.
I MPROVEMENTS
To improve the quality and reliability of the product, the parameters (voltage and current) are monitored and controlled automatically by using
PLC/CNC incorporation. Once the welding voltage and current is set on the CNC machine, the PLC will be monitoring the welding parameters and if there is any fluctuation in the parameters (voltage and current), the
PLC will turn ON or OFF the relay switches or virtual relays in the PLC and maintains the set value of welding voltage and current automatically. Thus the desired value of voltage and current of axle housing welding is maintained automatically with less human intervention.
1. PROGARAMMABLE LOGIC CONTROLLER
(PLC)
Siemens S7-200 PLC is used for incorporation with
CNC, features: a. The micro PLC that offers maximum automation at min. cost. b. Extremely simple installation, programming and operation. c. Large scale integration, space saving, powerful. d. Can be used both for simple controls and for complex automation tasks. e. All CPUs can be used in standalone mode, in networks and within distributed structures. f. Suitable for applications where programmable controllers would not have been economically viable in the past.
(b)
5
ISSN (Print): 2321-5747, Volume-1, Issue-2, 2013
International Journal on Mechanical Engineering and Robotics (IJMER) g. With outstanding real time performance and powerful communication options (PPI, PROFIBUS-DP,
AS-INTERFACE).
2. SETTING PARAMETERS
Whenever the actual voltage or current is not within the range entered in Custom Screen, the PLC send signal to CNC.
CNC actuates or de-actuates the relay switch and the required voltage or current is obtained.
The PLC monitors the voltage or current parameters and maintains the set value of voltage or current automatically within the range entered in custom screen.
Two relays or virtual relays (in plc.) are used to set the maximum and minimum current value.
Maximum and Minimum Value of voltage and current is set, whenever there is an increase or decrease of voltage and current then the relay will switch to minimum and maximum switch respectively. So that the set value of voltage and current is maintained automatically.
3. MERITS
By controlling and monitoring the welding voltage and current automatically,
Rework or rejection of the product will be reduced.
Axles can withstand the specified load.
Operator work will be reduced.
It saves time.
Improves production rate and quality of the product.
Number of labors will be reduced.
Losses will be reduced.
Wastage of materials will be reduced.
Increase in profit.
V. C ONCLUSION
The work presented a PLC/CNC incorporation to control the seam welding voltage and current automatically. The control of welding voltage and current of seam welding of axle housing was developed by using PLC ladder logic. The observation after controlling the welding voltage and current are:
Higher quality of weld.
Increase in productivity.
Operator work reduced.
Less fatigue to the operator.
Reduced skill requirement and rework.
Quality objectives met successfully.
The welding process is done automatically with less operator intervention. The PLC is able to perform accurate analysis in real time. Using the same PLC kit, it can be easily extended to additional machines.
VI. R EFERENCE
[1] AN INTRODUCTION TO MIG WELDING www. group support@weldability.com
[2] Seam Welding Monitoring System Based on
Real-Time Electrical Signal Analysis A new approach to in-line seam welding quality evaluation is presented BY MASSIMO
LANZONI, MIRKO SALOMONI, AND
BRUNO RICCÒ.
[3] Static And Modal Analysis Of Rear Axle
Housing Of A Truck by G. Rajesh Babu and N.
Amar Nageswara Rao Mechanical Engineering
Department, Nimra College of Engineering &
Technology, Ibrahimpatnam, Vijayawada.
[4] Productivity Improvement on a CNC Lathe by
Automatic Loading and Unloading of Throttle
Valve Component by Rohan Kulkarni, S.
Shivakumar and Roopa K Rao.International
Journal of Scientific & Engineering Research,
Volume 2, Issue 12, December-2011 1 ISSN
2229-5518 IJSER © 2011 http://www .ijser.org
[5] The Debate over Which PLC Programming
Language is the State of-the-Art By Dr.John R.
Wright, Jr., Journal of Industrial Technology,
Volume 15, and Number4 - August 1999 to
October 1999,
[6] Seam Welding Monitoring System Based on
Real-Time Electrical Signal Analysis a new approach to in-line seam welding quality evaluation is presented by Massimo Lanzoni,
Mirko Salomoni, and Bruno Riccò.
[7] Plasma Charge Current for Controlling and
Monitoring Electron Beam Welding with Beam
Oscillation, by Dmitriy Trushnikov, Vladimir
Belenki, Valeriy Shchavle, Anatoliy Piskunov,
Aleksandr Abdullin and Georgy Mladenov,
Published: 14 December 2012.
[8] Fatigue failure fault prediction of truck rear axle housing excited by random road roughness Meng
Qinghua, Zheng Huifeng and Lv Fengjun,
Accepted 28 February, 2011.
ISSN (Print): 2321-5747, Volume-1, Issue-2, 2013
6
International Journal on Mechanical Engineering and Robotics (IJMER)
[9] Static And Modal Analysis Of Rear Axle
Housing Of A Truck by G. Rajesh Babu and N.
Amar Nageswara Rao, Mechanical Engineering
Department, Nimra College of Engineering &
Technology, Ibrahimpatnam, Vijayawada,
International Journal of Mathematical Sciences,
Technology and Humanities 7 (2011) 69 – 76.
[10] In-process Monitoring and Adaptive Control for
Laser Spot and Seam Welding of Pure Titanium,
Yousuke Kawahito, Masayuki Kito and Seiji
Katayama Osaka University, Joining and
Welding Research Institute 11-1 Mihogaoka,
Ibaraki, Osaka 567-0047, Japan, JLMN-Journal of Laser Micro/Nanoengineering Vol. 1, No. 3,
2006.
[11] CT Inspection of Welding Seam for Half-Axles of Maneuverable Aircraft’s Stabilizers by Gong
Jin QI, Gang Qiang FU, Peng JING, Hong LEI,
18th World Conference on Nondestructive
Testing, 16-20 April 2012, Durban, South Africa.
7
ISSN (Print): 2321-5747, Volume-1, Issue-2, 2013