Introduction to ADC testing I Definition of basic parameters
advertisement

Introduction to ADC testing I
Definition of basic parameters
Ján Šaliga
Dept. of Electronics and Telecommunications
Technical University of Kosice, Slovakia
Agenda
Introduction
Deterministic and probabilistic models
Basic static parameters
Basic dynamic parameters
Other parameters
A/D converter – A/D interface
A/D interface
Reference and
power sources
x
Signal
conditioning
S&H
(optional)
ADC
Timing and control circuit
Buffer
x
k round
Q
ADC parameters
(characteristics & errors)
Static (quasistatic) parameters – derived from
transfer characteristic
Dynamic parameters – characterize a behavior
of ADC at time-varying signals
Point (gain, gain error, offset, missing code, ...)
Function (transfer characteristic, INL, DNL, ...)
SINAD, ENOB, SNR, SFDR, THD, IMD, ...
ADC parameter testing requires extraordinaire
accuracy
E.g.: 12-bit ADC: detetermination of transition level
with uncertainty < 1% →uncertainty of measurement
< 1/(100*4096) ~ 0,00025%=2,5ppm of ADC FS
Accuracy versus precision
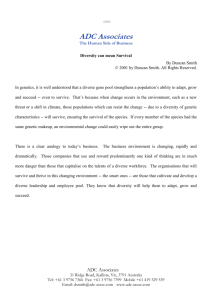
ADC transfer characteristic
Gain (slope)
error
Input
T[k] - transition level (thresholdcode k
of code k),
W[k]= T[k]- T[k-1] – code bin 111
width
Qnom
Tnom 2 1 Tnom 1
2N 2
N
Real
ADC
-3
-2
Ideal and real
straight lines
110
N – nominal resolution (number
of bits) of ADC -4
Nonlinearity
-1
101
100
0
Ideal
ADC
Input
analogue
value x(t)
[Vfs/Q]
Missing
code
1
011
2
3
4
Error in monotonicity
010
Offset
error
001
000
Vfs - full scale range
Vfs = Vref(2N-1)/(2N)
2N
Vfsn N
Tnom 2N 1 Tnom 1 2N Q
2 2
Gain and offset + their errors
Fitting the straight line:
End points straight line - connecting the two
end code transition or code midstep values
Least-square fit straight line according a
least-square fitting algorithm
Minimum-maximum straight line - the line
which leads to the most positive and the most
negative deviations from the ideal straight
line
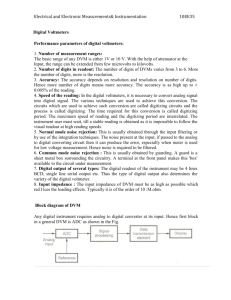
ADC transfer characteristic
Deterministic model
Output
code k
111
Stochastic model
Output
code k
101
Input
analogue
value x(t)
110
100
101
[Vfs/2N]
100
-4
-3
-2
-1
00111
010
001
000
2
3
1
2
Deterministic
definition
Channel profile
4
Input
analogue
value x(t)
P(k|x)
[Vfs/2N]
Stochastic
definition
1
k =0,1,...,2N-1
0
Conditional probability
1
1,5
2
Input
analogue
value x(t)
[Vfs/2N]
T kTEST : P k kTEST T kTEST P k kTEST T kTEST 0,5
DNL and INL
Differential non-linearity
Integral non-linearity
DNL [ k ] =
W [ k ] - Q nom
INL [k ]=
Q nom
T [k ] - Tnom [k ]
INLk
Qnom
k
DNLi
INLk 1 DNLk
i 0
Dynamic parameters I
Bandwidth (BW) - the band of frequencies of input
signal that the ADC under test is intended to digitize with
nominal constant gain. It is also designated as the Halfpower Bandwidth, i.e., the frequency range over which
the ADC maintains a dynamic gain level of at least 3 dB
with respect to the maximum level.
Gain flatness error (G(f)) - the difference between the
gain of the ADC at a given frequency in the ADC
bandwidth, and its gain at a specified reference
frequency, expressed as a percentage of the gain at the
reference frequency. The reference frequency is typically
the frequency where the bandwidth of ADC presents the
maximum gain. For DC-coupled ADCs the reference
frequency is usually fref = 0.
Quantisation noise and errors
Caused by rounding in quantisation process (and
ADC non-linearity)
Power of quantisation noise for ideal ADC (s2eq,
h2rms)
Is it dependent/independent on input signal?
Is the value Q 2/12 correct?
1 1
Distribution?
2
2 1
s q Q
2 2 J0 2N k
12 k 1 k
Answer: see the simulation
ADC noise and distortion
ADC output random noise – random signal:
Quantisation noise - uniform
Noise generated in input analogue circuits - Gaussian
Noise caused by sampling frequency jitter and aperture uncertainty
(Kobayashi)
Spurious – unwanted deterministic spectral components
uncorrelated with input signal (e.g. 50Hz)
Total noise – any deviation between the output signal
(converted to input units) and the input signal, except
deviations caused by linear time invariant system response
(gain and phase shift), harmonics of the fundamental up
to the frequency fm, or a DC level shift.
Distortion – new unwanted deterministic spectral
components correlated with input signal
Noise floor
determines the lowest input signal power level
which is reliably detectable at the ADC output, i.
e., it limits the ultimate ADC sensitivity to the weak
input signals, since any signal whose amplitude is
below the noise floor (SNR < 0 dB) will become
difficult to recover.
M / 2 1
NFl
2
Y k
k 1, k J , k hJ
2
1 M
Y
2 2
M
hmax
2
2
h 2 hmax
Dynamic parameters II
Signal to noise and distortion ratio
SINAD: for a pure sinewave input of specified amplitude
and frequency, the ratio of the rms amplitude of the ADC
output fundamental tone to the rms amplitude of the
output noise, where noise is defined as to include not
only random errors but also non-linear distortion and the
effects of sampling time errors, i.e., the sum of all nonfundamental spectral components in the range from DC
(excluded) up to half the sampling frequency (fs/2).
Y J NFl
2
SINADdB 10 log
M / 2 1
k 1, k J
Y K 2 NFl
2
2
2
1 M
Y
2 2
2
Dynamic parameters III
SNR
Signal to noise ratio (SNR) - harmonic signal
power (rms) to broadband noise power ratio
excluding DC, fundamental, and harmonics
Y J NFl
2
SNRdB 10 log
M / 2 1
k 1, k J , k hJ
2
Y k hmax 1 NFl
2
2
1 M
Y
2 2
2
Dynamic parameters IV
THD, THD+noise, IMD
THD
THDdB 20 log
H
i
2
i ADC
A
,
THD
H
i
2
i ADC
A
THD+noise = 1/SINAD
Intermodulation distortion (IMD) - for an input signal
composed of two or more pure sinewaves, the distortion
due to output components at frequencies resulting from
the sum and difference of all possible integer multiples
of the input frequency tones.
A
IMD
IMtone
Dynamic parameters V
Effective Number of Bits
Effective Number of Bits (Nef, ENOB) - for a sinusoidal input signal,
Nef is defined as:
Nef N log2
h rms
h
12
N log2 rms
s q
Qnom
SINADdBFS 1.76dB
6.02
where hrms is the rms total noise including harmonic distortion and
seq the ideal rms quantisation noise for a sinusoidal input.
(SINADdBFS = SINADdB - 20log(SFSR))
SFSR – signal to full scale ratio
Nef can be interpreted as follows: if the actual noise is attributed
only to the quantisation process, the ADC under test can be
considered as equivalent to an ideal Nef-bit ADC insofar as they
produce the same rms noise level.
Dynamic parameters VI
SFDR
Spurious-free dynamic range (SFDR) - expresses the range,
in dB, of input signals lying between the averaged amplitude of
the ADC's output fundamental tone, fi, to the averaged amplitude
of the highest frequency harmonic or spurious spectral
component observed over the full Nyquist band, for a pure
sinewave input of specified amplitude and frequency, i.e.,
max{|Y(fh)| , |Y(fsp)|}:
SFDR(dB) 20 log
Yavm(fi )
max{| Yavm(fh ) || Yavm(fs p) |
where: Yavm is the averaged spectrum of the ADC output, fi is the
input signal frequency, fh and fsp are the frequencies of the set of
harmonic and spurious spectral components.
Dynamic parameters VII
Experimental demonstration
Measurement setup (run generator first
and then demonstration)
Sound out
AI1 (DUT)
USB
NI USB 6009
ADC: 12 bits, 10kHz,
differential
Software (LabVIEW):
1. Sinewave generator = Sound card
2. Control: AI1 = DUT (FS, record)
Data processing and visualisation
Other parameters
Various electrical parameters, e.g. input
impedance, power requirements,
grounding, …
Time parameters, e.g. clock frequency,
conversion time, sampling frequency, …
Digital output: data coding, levels (logic),
serial/parallel, error bit rate, …
…
Introduction to ADC testing II
Basic standardized test methods
Agenda
Standardization
Static test method
Histogram test
Dynamic test with data processing in
time domain
Dynamic test with data processing in
spectral domain
Standardization
IEEE Std. 1057 - 1994, "IEEE Standard for Digitizing Waveform Recorders",
IEEE Std. 1241 - 2000, "IEEE Standard for Terminology and Test Methods for
Analog-to-Digital Converters
European project DYNAD – SMT4-CT98-2214, „Methods and draft standards
for the DYNamic characterisation of Analogue to Digital converters“
http://www.fe.up.pt/~hsm/dynad
IEC Standard 62008 “Performance characteristics and calibration methods for
digital data acquisition systems and relevant software”
Additional and related standards:
IEEE Standard on Transition and Pulse Waveforms, Std-181-2003 (IEC 60469-1, -2)
IEEE and IEC standards for DAQ and ADM – in preparation
IEC 60748 - covers only static ADC and DAC operations
…
Detail overview of standards and standardisation – see the lecture of Pasquale
Arpaia: A/D and D/A Standards, CD from SS on DAQ 2005
Standard comparison: Sergio Rapuano: Figures of Merit for Analog-to-Digital
Converters: Analytic Comparison of International Standards, In Proc. of IMTC
2006, Sorrento, Italy, pp. 134-139
ADC static test
Standardized method
ADC static test - basic ideas
Yields ADC transfer characteristic
Static point and function parameters can be
derived and calculated:
Gain, offset, FS, DNL, INL, …
Based on the stochastic model of ADC
Simple test setup – DC voltmeter is the only
accurate instrument
Time consuming – each T[k] is determined
individually. The total time: 2N x longer than
determination of one T [k]
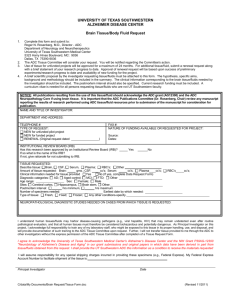
Static test setup (IEEE 1057)
Control and sampling
clock, ADC power, ...
Programable
DC source
ADC
under
test
Buffer
DC
Voltmeter
Control of test stand
(PC)
Recording device,
e.g. logic analyzer
ADC static test - algorithm
Start with the code k = 1
Find an input voltage level for which the probability of
codes lower than k in the record is slightly higher than 0.5
– the voltage is below T[k].
Find a bit higher voltage (the usual step is a quarter of Q)
for which the probability of codes lower than k is slightly
lower than 0.5 – the voltage is above T[k]
Fit these two point by line and calculate the voltage for
which the probability of codes smaller than k is 0.5 – this is
the transition level of code k – the voltage equal to T[k]
Repeat the procedure for all k = 1, 2, …., 2N-1 – the
complete transfer characteristic will be measured out
Uncertainty in the static test
The uncertainty can be reduced by increasing the
number of acquired samples (M).
The table shows the measurement precision for a
confidence level of 99,87%.
Number of acquired samples
(M)
Transition level measurement
precision
(% of noise standard deviation)
64
256 1024 4096
45% 23% 12%
6%
The main disadvantage
of the static testing
The test is long time consuming:
Let’s test 16bit ADC with sampling frequency
10kHz, testing step is Q/4, additive noise:
s=1LSB, required precision: better than 10%.
The chosen record length: 2000 samples
Measurement on one level takes
2000 x 0.1ms = 0.2s
Total required time: 0.2s x 2(16+4)= 58.2 hours!!!
Static test
Experimental demonstration
Measurement setup (run demonstration)
AI0 (DUT)
USB
AI1 (Voltmeter)
NI USB 6009
ADC: 12 bits, 10kHz,
differential
DAC: 12 bit, static, RSE
Software (LabVIEW) controls:
1. AO0 = DC test voltage
2. AIO = DUT - FS, record
3. AI1– virtual DC voltmeter with
averaging
1:10
AO0 (DC source)
4. Statistical data processing and
visualisation
Alternative static method
with feedback - IEEE 1241
Alternative static method
with feedback - IEEE 1241
Some experimental results I
NI USB 6008 (12 bits, 10kHz, 10000s/T)
Some experimental results II
NI USB 6008/9 (10000s/T)
Difference of
two following
measurements
Switching
monitor during
the
measurement
Histogram (statistical) test
Standardized method
Histogram (statistical) test
Basic ideas I
Goal: to determine ADC transfer characteristic
(the same as in static test method)
The calibrating signal is a time invariant repetitive
signal covering the ADC full scale
The stream of ADC output codes is recorded
Histogram is built from the record
The relative count of hits in code bin k in the histogram
in comparison to the calibrating signal probability
density function (or counts for code bin k in cumulative
histogram in relation to signal probability distribution
function) gives information about the code bin width
(or code transition levels)
Histogram (statistical) test
Basic ideas II
The best shape would be ramp or triangular
signal. Why? Problem?
The basic recommended signal by all standards:
sinewave. Why?
To achieve a required accuracy a relative long
record (or records) is required
Faster than the static test
Requirement: an accurate generator with an
extremely high accuracy (low distortion, high
linearity, high spectral purity)
Histogram (statistical) test
General test setup
Obliged
Recommended
Optional
Synchronisation
Accurate generator
(arbitrary, DDS)
Notch
filter
CLK
generator
ADC under
test
Control and data
processing (PC)
Buffer
Recording
device
Ramp signal (IEEE 1241)
T[k]=C+G.HC[k-1]/S for k=1, 2, .... , (2N- 2)
G is a gain factor, C is an offset factor,
The code bins 0 and 2N-1 are usually excluded from
data processing (why?)
HC j
j
Hi
i 1
DNL k
S
2N 2
Hi
C T 1
i 1
T k T k 1
H k
Q
S 2N 2
T 2N 2 T 1
G
S
uncertainty : given by ramp nonlinearity and noise
Sinewave signal
(All standards) – theoretical background I
Signal: xt A cos2ft
d 1
x
Density
px 2.
arccos
dx 2
A
of probability:
Distribution of probability:
Vfs k 2N 1
P k
2N
A2 x 2
1
Vfs k 1 2N 1
2N
1
A x
2
1
2
dx
Vfs k 2N 1
Vfs k 1 2N 1
1
arcsin
arcsin
N
A.2
A.2N
,
Sinewave signal
(All standards) – theoretical background I
Ideal theoretical histogram:
Vfs k 2N 1
Vfs k 1 2N 1
M
arcsin
Hid k
arcsin
N
A2
A 2N
DNL:
Hk Hid k
DNLk
Hid k
Transition levels:
Hc k 1
T k C A cos
N
Hc 2 1
for
k 1, 2, , 2N 1
Sinewave signal
(All standards) – theoretical background II
Problem in praxis: what are the sinewave
parameters – A, C →Hid[k]?
Various ways of estimation, e.g Dynad:
Incorrect
~
~
H 0
H 2
T 2 1cos
T 1 cos
H 2 1
H 2
estimation C~
H 0
H 2 2
→error in
cos
cos
H 2 1
H 2 1
gain and
~
~
~
T 2 1 T 1
A
offset
H 0
H 2 2
cos
cos
H 2 1
H 2 1
N
C
C
C
N
C
C
C
N
C
C
N
C
C
N
C
C
N
N
N
N
N
N
,
2
1
Sinewave signal
Test conditions I
The total record must contain exactly an integer
number J of sinewave cycles
R partial records can be used instead of one long
record
Total recorded number M of samples must be
relatively prime with J, i.e. they have no common
factor
J
fi
fs
Then the sampling and
M
sinewave frequency are: r
1
,
r
2 JM
r fi f s
Sinewave signal
Test conditions II
The number of samples (M) to acquire in the
histogram test, depends on:
The noise level in the measurement system,
The required tolerance (B is measured in LSBs) and
confidence level (a) and the M is different if DNL
(quantization interval) or INL (transition levels) it to be
determined.
P TMEAS BQ Treal TMEAS BQ 1 a
The specification of tolerance for an individual
transition level or code bin width, or for the worst case
in all range.
Sinewave signal
Test conditions III
The equation generally used to determine the number of records
to acquire is:
2
2N 1 Ka
s
c 1,1
R J
0
,
2
c
N
T 2 1 T 1
B
VS
c 1 2
N
T 2 1 T 1 M
Ka 2 erf
1
a
a
2
e
2
d
0
J=1 for INL, J=2 for DNL, s is the standard deviation of noise level
in volt for the INL determination and the smaller of the values of
s and Q/1,1 for the DNL determination.
Sinewave signal
Simulation
Simulation = (see the simulation):
Form of histogram for various test signals
Error caused by limited number of samples
Error caused non-coherent sampling
Error caused by noise in input signal
Error caused by higher harmonics
…
Histogram test
Experimental demonstration
Measurement setup (run generator first
and then demonstration)
Sound out
1:2
AI1 (DUT)
USB
NI USB 6009
ADC: 12 bits, 10kHz,
differential
Software (LabVIEW):
Sinewave generator = Sound card
AI1 control = DUT - FS, record
Data processing and visualisation
Results of experimental tests
Comparison generators (USB 6009)
Stanford DS 360
(20-bits, 100 mil.
samples)
Agilent 33220A
(14-bits,
100 mil. samples)
Histogram (statistical) test
Some non-standardized methods
Non standardized histogram tests
Basic ideas
Reasons:
To use signals that are closer to real signal digitized
by ADC in common applications
To use signal that can be simply generated with
required precision
Common signals:
Gaussian noise
Exponential signal
Uniform noise, small sinewave or triangular with DC
steps, …
Non standardized histogram test
Gaussian noise I
Martins, R. C., Serra, A. C.: ADC Characterisation by using
Histogram Test stimulated by Gaussian Noise. Theory and
experimental results, Measurement, Elsevier Science B. V.,
vol. 27, n. 4, pp. 291-300, June 2000
The noise is centred within ADC input range and overlap
the whole ADC range
Problem generate the noise with really precise Gaussian
distribution – convenient methods for low resolution ADCs
and very high and very low frequencies where it is difficult
to generate sinewave with required purity
Non standardized histogram test
Gaussian noise II
Holub J., Komárek M., Macháček J., Vedral J.: STEP-GAUSS
STOCHASTIC TESTING METHOD APPLICATION FOR
TRANSPORTABLE REFERENCE ADC DEVICE, Proc. 8th IWADC 2003,
Perugia, Italy, pp. 223-226
Gaussian noise with a small standard deviation is moved within the
ADC input range by adding a DC voltage (mean) in small steps so
that the results will be the same as using uniform noise overlapping
the whole ADC full scale
1
lim pdfG k, s 0
0
k
Discussion: is really possible in praxis to fulfil the requirement of the
limit with finite DC steps with acceptable precision?
Non standardized histogram test
Small amplitude sinewave or triangular
with a DC component
Michaeli L., Serra A.C., ..: In: IEEE transactions on
instrumentation and measurement, Measurement, proc. of
IMTC, IMEKO – IWADC
Idea: multistep test with fractional histograms (and INLs)
acquired at small signal (sinewave, triangular) covering only
a few tens/hundreds of codes shifted within ADC FS by
known DC voltage
Advantage: the quality of test signal may be much worse than
those of signal covering the whole FS of ADC
Disadvantage: connecting the partial histograms to build the
final histogram
Non standardized histogram test
Exponential signal
Holcer R., Michaeli L., Šaliga J.: DNL ADC testing by the
exponential shaped voltage, In: IEEE transactions on
instrumentation and measurement, Vol. 52, no. 3
(2003), pp. 946-949.
Šaliga J., Holcer R., Michaeli L.: Noise sensitivity of the
exponential histogram ADC test, In: Measurement,
Vol. 39, no. 3 (2006), pp. 238-244
We will continue with a new PhD. Student next
year
Exponential signal is simple to generate –
native signal in electronic circuit
Problem: distortion by other exponential with
different time constant and keeping the final
value of the signal known and constant.
t
x t FS B exp B
Non standardized histogram test
Small signals with a DC component
Measurement setup (run generator first
and then demonstration)
Sound out
1:2
1:10
AI0 (DUT)
USB
AO0 (DC shift)
Software (LabVIEW):
Arbitrary generator = Sound card
DC shift = AO0
NI USB 6009
ADC: 12 bits, 10kHz,
differential
AI0 = DUT (FS, record)
Data processing and visualisation
Histogram test
Conclusions
Histogram versus static test: histogram test
gives usually better – more reliable results
because:
Faster = the test conditions are “constant” and
measurement of any T [k] is distributed and
repeated in time over the all testing time
Disadvantage: an precise generator is needed
Non standardised test procedures can bring
simplifying in test setup and decrease the
requirements on instrumentation precision.
ADC dynamic testing
Dynamic test
Introduction
Goal:
Determination of various dynamic ADC
parameters such as SINAD, ENOB, SNR, THD,
IMD SFDR, …
Two ways of data processing:
Time domain – directly SINAD, ENOB
Spectral domain (DFT test): SINAD, ENOB,
SNR, THD, IMD SFDR, …
No way can be generally supposed to be the
best one
Dynamic test
General test setup
Synchronisation
Accurate harmonic
generator (DDS)
+
Notch
filter
Accurate harmonic
generator (DDS)
CLK
generator
ADC under
test
Control and data
processing (PC)
Buffer
Obliged
Recommended
Optional
Only for IMD and multitone methods
Recording
device
Dynamic test
Requirements
Coherent sampling – the same as for sinewave
histogram test - the precise coherence is not
necessary
Minimal size of record:
N
2
Mmin
Mmin 2N
1 DNLmax
Record can consist of a few partial records
Sinewave must cover the ADC input range as
much as possible (more than 90 – 95%) but must
not overload it.
Dynamic test
Data processing in time domain
Dynamic test
Data processing in time domain I
See the following lectures by prof. Kollár and prof.
Händel
Basic idea: to calculated the noise in the record
(residuals) as the deference between the input
signal – sinewave (analogue samples) and the
record (digitized samples).
~
ηyx
Knowing the noise the SINAD and ENOB can be
calculated according the definitions
Dynamic test
Data processing in time domain II
Difficult task and question: the input signal must
be precisely know – how to do it?
Common solution: recovering the input signal
from the record by a fitting method (LMS)
Three-parameter fit (A, C, )
Four-parameter fit (A, C, , f)
Question: is the recovered fitted signal really the
origin input signal?!
Dynamic test
Three-parameter fit I
Simple calculation = system of linear
system of 3 equations is to be solved
~
x m A cos 2m fi C A cos2mf iN C
fs
A cos cos 2m fi A sin sin 2m fi C
fs
fs
A cos cos2mf iN A sin sin2mf iN C
1
M
M 1
2
y
m
A
cos
cos
2
mf
A
sin
sin
2
mf
C
iN
iN
m0
2
~
2
E y x h rms
Dynamic test
Three-parameter fit II
x P A cos , A sin, C
In matrix form:
T
y ~x y Dx y Dx , where
2
T
P
1
cos2f
iN
D
...
cos2 M - 1fiN
P
0
1
sin2fiN
1
...
...
sin2 M - 1fiN 1
y Dx P y Dx P
0
x P
T
T
xP D D
D y
1
T
Dynamic test
Three-parameter fit III
Necessary condition:
The input (and sampling) frequency must
be precisely known!!!
If not – incorrect results SINAD, …
SEE THE SIMULATION
Dynamic test
Four-parameter fit I
Unknown parameters: A, C, , f
Difficult calculation = system of non-linear
system of 4 equations is to be solved
The system can be solved only by
iteration process
Dynamic test
Four-parameter fit II
Let xP A cos , A sin, C, fiN
T
x P j Aj cos j , Aj sin j , C j , fiN j
T
Let the first estimation is fiN 0 f iN 0 0
T
j
Repeat calculation: x P j D D j
1
cos 2fiN j
D j
...
cos 2fiN j M 1
0
sin 2fiN j
...
1
sin 2fiN j M 1
D y
1
T
j
fiN j fiN j 1 fiN j 1
0
Aj 1 cos j 1 sin 2fiN j
1
Aj 1 sin j 1cos 2fiN j
...
...
Aj 1 M 1 cos j 1 sin 2fiN j M 1
1
Aj 1 M 1 sin j 1 cos 2fiN j M 1
Dynamic test
Four-parameter fit III
Problem with convergence – one global minimum
and a few local minima
If the first estimation is incorrect the iteration
converges to the fault minimum
One of best estimations is the estimation from
spectrum within the interval (J-s, J+s):
Js
See the simulation
~
fiN
2
m
m
f
Y
m J s
Js
2
Y
m
m J s
Dynamic test
Data processing in spectral
domain – DFT test
Dynamic test
Data processing in spectral domain I
The same test setup, requirements and
the first step as for Data processing in
time domain
The DFT spectrum is calculated from
the record
Using the definitions (see the beginning
part of this lecture) the unknown ADC
parameters can be estimated
Dynamic test
Data processing in spectral domain II
Common problem in praxis: incoherent sampling –
leakage effect in the record spectrum
Solution: applying a window function (Hanning, 7
term Blackman-Harris, …) to suppress the leakage
effect and then correction of results according the
window parameters (see the general theory of
windowing in DSP)
Introduced in detail in DYNAD
Rule: the higher the ADC resolution is, the lower the
side-lobes of the window have to be. Nevertheless,
lowering the side-lobes results in increasing the main
lobe width
Calculation is much more complex
Dynamic test
Data processing in spectral domain III
Spectrum calculation: Y i
M 1
w mx m e
j 2fiN
i.m
M
m0
Error in coherency: fi J J fs
M
Processing gain
A w n
n 0
2
s
PG
2
T
M 1
M 1
2
w n
2
n 0
2
A
s T2
Equivalent Noise Bandwidth
2
w n
Mn 01
2
w
n
M 1
n 0
M 1
ENBW
M w 2 n
n 0
w
n
n 0
M 1
2
Dynamic test
Data processing in spectral domain IV
Changes in formulas: example 1: Noise
floor:
M / 2 1
NFl
2
k 1, k J 1, k rnd h( J j l
Y k
2
1 M
Y
2 2
M
hmax (2lmax 1)
2
h 2 hmax , l 0 lmax
2
Dynamic test
Data processing in spectral domain V
Changes in formulas: example 2: SINAD
Y J NFl
2
SINADdB 10 log
2
AB
where :
M / 2 1
A
Y k 2lmax 2 NFl
2
k 1, k J 1, k rnd h( J j l
with l 0 lmax
2
W 0
10 logENBW 10 log
2
jr fs
W
c
M
and
B ENBW
Y rnd hJ .
h max
h 2
2
j
2
2
W 0
1 M
Y ,
2 2
2
fracr hJ j fs
Wc
M
2
,
W 0
M 1
wn
n 0
f
Wc j s
M
e
i 2
e j fs
M
w t dt
Dynamic test
Conclusions
No method of data processing can be
suppose to be absolutely the best
Processing in time domain is less sensitive
on coherency but the 4-parameter fit can be
problematic
Processing in frequency domain gives
directly much more parameters but it is very
sensitive on coherency
The final conclusions
ADC testing is not a simple task
Extremely difficult task: to test ADC with high
resolution (more than 20 bits)
Methods are in the process = a challenge for you
Another challenge: test procedures for special
ADC, e.g. band-pass for direct digitalization and
demodulation of high frequency signals, etc.
Thank you for your attention