Diagnostics/Prognostics for Health Management
advertisement

Condition Based Maintenance of Critical Machinery Assets:
An Intelligent Architecture
Dr. George Vachtsevanos
Georgia Institute of Technology
School of Electrical and Computer Engineering
Atlanta GA 30332-0250
(404) 894-6252 Voice
(404) 894-7583 Fax
gjv@ece.gatech.edu
http://icsl.marc.gatech.edu
Presented at the Workshop on Automated Machinery Maintenance
The University of Texas at Arlington
July 17, 2003
Topical Outline
1.
2.
3.
4.
5.
Introduction – What is Condition Based
Maintenance?
Elements of a CBM Architecture
Example Demonstration
An Intelligent Agent Based CBM Paradigm
Future R&D Directions/Concluding
Comments.
Condition-Based Maintenance
The Opportunity
Condition Based
Maintenance (CBM)
promises to deliver
improved maintainability
and operational availability
of naval systems while
reducing life-cycle costs
The Challenge
Prognostics is the Achilles heel of CBM systems - predicting the
time to failure of critical machines requires new and innovative
methodologies that will effectively integrate diagnostic results with
maintenance scheduling practices
Condition Based Maintenance
Objective
– Determine the “optimum” time to perform
maintenance
Problem
Definition
– A scheduling problem – schedule maintenance
timing to meet specified objective criteria under
certain constraints
Condition Based Maintenance
Major
Objective
– Extend system life cycle as much as possible
without endangering its integrity
Enabling Technologies
– Various Optimization Tools
– Genetic Algorithms
– Evolutionary Computing
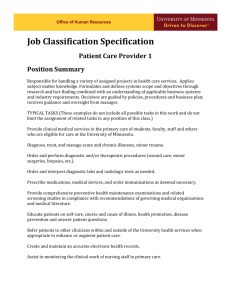
A Maintenance Management
Architecture
Time-Directed Tasks
• Trend Data
• Logs
Maintenance Schedule
Real-time
Diagnostics /
Prognostics
and
Trend Analysis
• Technical Doc Ref
• Preplanned Work
Corrective Tasks
• Emergent Work
Case Library
Other
Process
Management
Component
(ERP)
Work Order
Backlog
• Material Required
• Labor Required
• Work Procedures
• Actions Taken
• Conditions Found
• Cost Collector
Enabling Technologies
Genetic Algorithms for Optimum Maintenance Scheduling
Case-Based Reasoning and Induction
Cost-Benefit Analysis Studies
CBM Performance Assessment
Objective:
– To assess the technical and economic feasibility of various
prognostic algorithms
Technical Measures:
– Accuracy, Speed, Complexity, Scalability
Overall Performance Measure:
– w1Accuracy + w2Complexity + w3Speed + …
(wi - weighting factors)
PM1
PM2
PM3
Performance
Algorithm #1
*
*
*
Assessment Matrix:
Algorithm #2
*
*
*
Algorithm #3
*
*
*
Prognostics
Objective
– Determine time window over which maintenance
must be performed without compromising the
system’s operational integrity
Prognostics
Enabling Technologies
– Multi-Step Adaptive Kalman Filtering
– Auto-Regressive Moving Average Models
– Stochastic Auto-Regressive Integrated Moving
Average Models (ARIMA)
– Forecasting by Pattern and Cluster Search
– Variants Analysis
– Parameter Estimation Methods
– Others
Prognostics
Enabling Technologies (cont’d)
– AI Techniques
Case-Based Reasoning
Intelligent Decision-Based Models
Min-Max Graphs
– Petri Nets
– Soft Computing Tools
Neural Nets
Fuzzy Systems
Neuro-Fuzzy
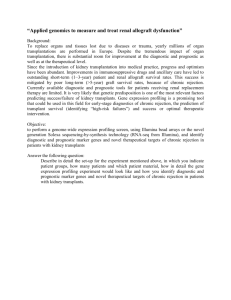
PEDS Software System
Architecture (Stand-alone)
Hardware
•Plant
•Sensors
•DAQ
CBM
Causal
factors
Scenario
Generator
main. schedule
FAHP
Causal
Adjustments
1. GUI
2. Data
Preprocessing
3. Mode
Estimator /
Usage Pattern
Identification
Event Dispatch
Central DB
failure
dimension
Database
Management
5. Feature
4. Feature
Extraction
Extraction
5.
Classifier
(Fuzzy)
6.
Virtual
Sensor
(WNN)
DWNN
Classifier
(WNN)
Case-based
Diagnostic
Reasoner
CPNN
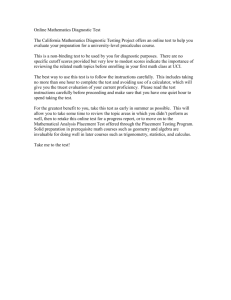
The Navy Centrifugal Chiller
Chiller Failure Modes
•Condenser Tube Fouling
•Condenser Water Control Valve Failure
•Tube Leakage
•Decreased Sea Water Flow
•SW in/out temp.
•SW flow
•Cond. press.
•Cond. PD press.
•Cond. liquid out temp.
Compressor
Pre-rotation Vane
•Compressor Stall & Surge
•Shaft Seal Leakage
•Oil Level High/Low
•Aux. Pump Fail
•Oil Cooler Fail
•PRV/VGD Mechanical Failure
•Comp. suct. press./temp.
•Comp. disch. press./temp.
•Comp. oil press./flow (at required points)
•Comp. bearing oil temp
•Comp. suct. super-heat
•Shaft seal interface temp.
•PRV Position
Condenser
Evaporator
•Target Flow Meter Failure
•Decreased Chilled Water Flow
•Evaporator Tube Freezing
•CW in/out temp./flow
•Eva. temp./press.
•Eva. PD press.
•Liquid line temp.
•(Refrigerant weight)
•Non Condensable Gas in Refrigerant
•Contaminated Refrigerant
•Refrigerant Charge High
•Refrigerant Charge Low
Timing sequence(1)-No fault Detected
Start next
cycle
Data
Collection
Mode
Identification
Feature
Extraction
(Extract features
For Diagnostics only)
FuzzyDS
WNN
No Fault Detected
Prognostic routines
will not run
t0
t1
t2
t
1. The timing sequence is managed by the Task Manager
2. Algorithm modules are started by FEATURE READY events
3. Each diagnostic module decides upon the presence or absence of a fault
4. The diagnostic modules report their conclusion to the database.
5. Each diagnostic module runs its routine and responds back to the task manager.
6. Task manager receives the events and decides which module or algorithm should be started.
7. The diagnostic decision (or No fault) is displayed on the GUI;GUI receives result from database.
8. All prognostic routines are initiated when a fault has been detected.
Timing sequence(2)—Fault Confirmed
Start
confirmation
Continue
confirmation
Fault confirmed
Start prognosis
Data
Collection
Mode
Identification
Collect data for
prognosis
Feature
Extraction
Extracts features
for prognosis
FuzzyDS
WNN
DWNN
CPNN
Fault Detected
By FuzzyDS or
WNN
t0
Fault
confirmed
t1
t2
t3
t4
t
Timing sequence(3)—Fault not confirmed
Start
confirmation
Continue
confirmation
Start normal
cycle again
Data
Collection
Feature
Extraction
FuzzyDS
WNN
Fault Detected
By FuzzyDS or
WNN
t0
No fault
detected
here
t1
t2
t3
t4
t
Software Design
Developing platform: Microsoft Visual C++ ,
Visual Basic, SQL server 2000, Access 2000.
Software running under Windows NT platform
Component based open system architecture. All
the system components are implemented as
Microsoft COM objects
Event-based distributed communication. Capable
of transmitting events at different priorities.
Provides database for storage of collected
data,configuration information, diagnostic and
prognostic results.
Conceptual Model of PEDS — 3-Tier Client-Server Architecture
User Services
Prognostic Services
Persistent Services
Diagnostics
Operator User
Interface
ICAS Database
Interface
Feature
Extraction
Administrator
User Interface
Tier 1
Prognostics
Tier 2
Features
Repository
Interface
Tier 3
Software Diagram
Data sampling module
Task Manager
Time Out?
Start Sampling Data
Sampling
Data
Event
N
Enough Data?
y
Save to
Database
Diagnosis
Start Feature Extractor
N
Wait for
event
Feature extractor
Get Data
From
Database
Events
Feature Ready?
y
Event
Prognosis
Wait for
event
Wait for
event
Get Features
From
Database
Get Features
From
Database
Do
Diagnosis
Do
Prognosis
Save results
to Database
Save results
to Database
N
Time Out?
y
Do
Extraction
Start Diagnosing
Save Features
to Database
Start Prognosing
Database relationships
Mode Diagram
Example Testbed: AC-Plant
Mode Identification
• Modes are characterized by the dynamics, set-points, and
controller.
• Modes switch due to events.
Fuzzy Petri Net
(Mode Changes Due to Events)
Mode
Decision
Sensors
Dynamics
Classifier
(Mode Due to Dynamics)
Current
Mode
Fuzzy Petri Net
other modes
Normal Mode
Overload
Mode
other modes
Events Characterized by Membership Functions
53
44
If Chilled Water Inlet Temperature is above 53 degrees
and
Chilled Water Outlet Temperature is above 44 degrees
then
Switch to Overload Mode
Fuzzy Petri Net Simulation
Sensors
Fuzzy Petri net marking
mode
marking
SENSORS
MODE CHANGES
Pre-rotation vane position
Chilled water inlet temperature
Chilled water outlet temperature
Normal Load Mode
Full Load Mode
Overload Mode
Feature Selection and Extraction
Sensors
PreProcessing
Data
Feature
Extraction
Highpass Filtered horizontal and vertical scans - absolute value
Windowed highpass filtered results - absolute value
10
10
8
8
6
6
4
4
2
2
50
100
150
200
250
300
2.5
0
50
100
150
200
250
300
2.5
2
2
1.5
1.5
1
1
0.5
0.5
0
Prediction
of Fault
Evolution
Fault
Classification
20
40
60
80
100
120
140
160
180
0
20
40
60
80
100
120
140
160
180
Motivation: Data driven
diagnostic/prognostic
algorithms require for fault
detection and classification a
feature vector whose
elements comprise the “best”
fault signature indicators
Intelligent distinguishability
and identifiability metrics
must be defined for selecting
the best features
Time and frequency domain
analysis techniques must be
employed to extract the
selected features
Overall Procedures for Feature Selection
and Diagnostic Rule Generation
PEDS Database
Raw
Database
Featurebase
Feature
Vector Table
Diagnostic
Rulebase
Feature Preparation
Preprocessing
Feature
Extraction
Rough Set*
Feature
Selection
Rough Set
Rule
Generation
* Rough set theory is a popular data mining methodology, which provides mathematical methods to remove
redundancies and to discover hidden relationships in a database.
Feature Preparation
Heuristic Feature Pre-selection
Fault Symptoms
from ONR Report
Featurebase
Available Measurements
from York Test
Fault Mode1
Time Feature 1 Feature 2
York Test
Database
Raw
Data
Preprocessing*
Feature
Extraction
Feature
Candidates
Decision
t1
20.5
11.5
0
t2
23.5
9.5
1
* Preprocessing includes removing unreasonable objects from the database and assigning the operational status.
Feature Extraction Architecture
Maintainance
Actions
Rough Set Data MIner
Feature
Selector
Feature
Vectors
Rule
Generator
Historical
FeatureValues
Featurebase
Feature
Vector Table
Feature
Table
Diagnostic
Rules
Diagnostic
Rule Table
Classifier
Designer
Operator
Sensor Suite
Feature
Vectors
Raw
data
Data Calibration
Preprocessing
Classifier
Parameters
Diagnostic
Rules
Feature
Extractor
On-line
Feature Values
Diagnostic
Results
Alarms,/
Reports
Diagnostor
GUI
Database
Prognostor
Historical
Feature Value
Diagnostic/Prognostic
Module
Prognostic
Results
Figure 1-2. Industrial Diagnostic/Prognostic Framework based on Data Mining Feature Selection.
The Diagnostic Module
2.5
2
1.5
High-frequency failure modes
(engine stall, etc.): The Wavelet
Neural Net Approach
1
0.5
0
-0.5
-1
-1.5
-2
-2.5
A Two-Prong
Approach
0
100
200
300
400
500
13.8
13.6
13.4
Low-frequency events
(Temperature, RPM sensor, etc.):
The Fuzzy Logic Approach
13.2
13
12.8
12.6
12.4
12.2
0
50
100
150
200
250
Sensor Data
Features
raw data from sensor
Denoised signal
13.8
3
13.6
13.4
normalized level
2
12.6
Preprocessing and
Feature Extraction
0
-1
13
12.8
12.4
12.2
0
50
100
150
200
250
300
400
500
time
0.2
0.15
0.1
-2
slope
normalized level
1
13.2
0.05
-3
0
0
100
200
300
400
500
time
-0.05
0
100
200
time
Failure
Templates
Fuzzify Features
Fuzzy Rule Base
(1) If symptom A is high & symptom B is low
then failure mode is F1
(2) ...
Inference Engine
(Defuzzify)
Failure Mode
Fuzzy Logic Diagnostic
Architecture
Features
Fuzzy Logic Classification
Dempster-Shafer
Theory of Evidence
Construct Mass
Functions from
Possibilities
Combine
Evidence
Calculate
Degree of Certainty
Degree of Certainty
Fuzzification
Rulebase
Fuzzy
Inference
Engine
Defuzzification
Threshold
for Fault
Declaration
Fault Declaration
Prognostics
y
y
Two Prognostic
Scenarios:
Unsupervised
Two Prognostic
Supervised
t
Value-At-Any Time
t
t
y
y
Outcomes:
Time-To-Failure
t
Prognostics
Supervised
F(n)
Fault Dimensions
Failure Rates
Trending Information
Temperature
Predictor
DWNN
Fault Growth
(DWNN)
F(n+h)
U(n)
Component ID
Unsupervised
~
F (n h ) ( F (n ), U ( n ))
Delay h
F(n)
F (n h ) DWNN ( F (n ),
F (n ) F (n T1 ) F (n 1) F ( n T2 )
,
,U (n ))
T1
T2
DWNN
U(n)
F(n+h)
The Prognostic Module
QUESTION: Once an impending failure is detected and identified, how can
we predict the time window during which maintenance must be performed?
Sensor
Data
Prognostic
Module
Diagnostic
Module
T
t
CBM
(T=?)
APPROACH: • Employ a recurrent neuro-fuzzy model to predict time window T
• Update prediction continuously as more information becomes
available from the diagnostic module
Wavelet Neural Network (WNN)
Hidden
Layer
1
x1
y1
2
x2
cjk
1
M-1
xN
Input
Layer
M
yK
Output
Layer
clin1
clin
K
Direct
Link
y [ A1 ,b1 ( x) A2 ,b2 ( x) AM ,bM ( x)]C [ x1 ]Clin
Dynamic Wavelet Neural
Network (DWNN)
Y(t)
Y(t-1)
Y(t-M)
U(t)
z-1
z-2
z-M
WNN
Y(t+1)
U(t-1)
U(t-N)
Y(t+1) = WNN(Y(t), …,Y(t-M), U(t), …, U(t-n))
On Virtual Sensors
Many failure modes are difficult or impossible to monitor
Question: How do we build a “fault meter”?
Answer: Virtual Sensor
The Notion: Use available sensor data to map known
measurements to a “fault measurement”
Potential Problem Areas: How do we train the neural net?
Laboratory or controlled experiments required
Dynamic Virtual Sensor
Vibration Signals
Power Spectrum Data
Acoustic Data
Dynamic
Virtual Sensor
Temperature
Component ID
(DWNN)
Fault Growth
(fault dimensions
location, etc)
Implementation of The
Prognostic System
Hardware (on-line)
O
b
j
e
c
t
Raw
Signal
tri-axial
vibrometer
Signal
Acquisition
Hardware
CPU or DSP
Processor
Software (on-line and off-line)
Signal
Preprocessing
Feature
Extraction
WNN
DWNN
Prognosticator
R
e
s
u
l
t
Application Examples
A defective
bearing with a crack causes the
machine to vibrate abnormally
Vibrations can be caught with accelerometers
which translate mechanical movement into
electrical signals
Bearing crack faults may be prognosed by
examining and predicting their vibration
signals
An Experimental Setup
- Cracks on the races or balls
- Particles in the lubricant
- Gaps in between moving parts, etc
A Sample Database
An exemplary database for training the prognostic predictor
Signals
Features
Fault Dimensions
Time Stamps
Stext1.dat
10.25
102.05
12:23:48
Stext2.dat
15.63
115.21
12:26:23
Stext3.dat
24.84
152.34
12:29:55
Stext4.dat
35.76
190.45
12:32:61
Bearing Fault Diagnosis
Time Domain - defective bearing
5
0.3
4
0.2
3
0.1
2
Amplitude
Amplitude
Time Domain - good bearing
0.4
0
-0.1
0
-1
-0.3
-2
-0.4
-3
0
200
400
600
800
-4
1000
Time
features = [0.3960 0.1348]
1
-0.2
-0.5
For the good bearing,
For the defective bearing,
0
200
400
600
800
1000
Time
Spectrum Domain - good bearing
Spectrum Domain - defective bearing
0.14
10
[0 1] = WNN([0.3960 0.1348])
===> The bearing is good!
9
0.12
8
7
0.08
Amplitude
Amplitude
0.1
0.06
0.04
6
5
[1 0] = WNN([4.9120 9.2182])
===> The bearing is defective!
4
3
2
0.02
1
0
features = [4.9120 9.2182]
0
20
40
60
80
Spectrum
100
120
140
0
0
20
40
60
80
Spectrum
100
120
140
Bearing Fault Prognosis
12
Power Spectrum Area
10
Failure Condition
8
6
4
TTF
2
0
0
20
40
60
Time Window
80
6
Power Spectrum Area
5
Original
4
TTF = 19 time units
DWNN Output
3
2
1
0
0
20
40
60
Time Window
80
100
100
120
Current time
6
WNN Output
3
2
1
Prediction Time
0
20
40
60
Time Window
80
Prediction up to 98 time windows using
the trained WNN
100
Predicted time to
failure
Failure
Condition
10
Real Data
4
0
12
Power Spectrum Area
Power Spectrum Area
5
Current time
Finish
time
8
6
Time-to-failure
4
2
0
0
20
40
60
Time Window
80
100
Prediction of time-to-failure using
the trained WNN
time-to-failure = 38 time windows
120
Prognosis in the frequency
domain:
Prognosis using the trained DWNN
Training of the DWNN with the PSD growth data
450
350
400
300
Original
350
DWNN Output
300
200
Power Spectra
Power Spectra
250
150
100
250
200
150
100
50
50
0
0
-50
0
100
200
300
400
500
Frequency Window
600
700
800
-50
0
200
400
600
800
Frequency Window
1000
1200
Vibration Data with Growth and Its max PSDs
Training of DWNN Using GA
Gene tic Optimiza tio n
0.0 3 8
0.0 3 6
C o st functio na l
0.0 3 4
0.0 3 2
0 .0 3
0.0 2 8
0.0 2 6
0.0 2 4
0
50
1 00
Gene ratio n
1 50
20 0
DWNN-Produced MaxPsd profiles
Original MaxPSD profiles for the three axes
500
500
450
400
400
350
300
300
250
200
200
100
150
100
0
50
0
0
20
40
60
80
100
-100
0
20
40
60
80
100
DWNN-Predicted defect sizes
500
2000
400
1500
Width
Width
Original and DWNN-Produced defect sizes
300
200
500
100
0
0
20
40
60
80
100
300
1500
200
1000
Depth
Depth
0
1000
100
20
40
60
80
100
120
140
160
0
20
40
60
80
100
120
140
160
500
0
0
-100
0
0
20
40
60
80
100
-500
Mounting Bolt Faults
Original Vibration Signal
0.4
0.2
Voltage (mv)
0
-0.2
-0.4
-0.6
-0.8
-1
0
200
400
600
800
1000
Time (ms x 10)
1200
1400
1600
PSD Peaks of Windowed Vibration Signal
0.35
0.3
PSD Peak Values
0.25
0.2
0.15
0.1
0.05
0
0
20
40
60
Window Tags
80
100
Problem Definition
Challenges
in “Technology Prediction”
– Long term prediction (i.e. 30 years) is facing
growing uncertainty
– Current trends can be misleading
– External causal factors are numerous and difficult
to quantify
– Data is sparse, difficult to extract a trend
Confidence Prediction Neural Network
Time Series Prediction
Architecture
multi-step prediction using
a novel neural network with a
probability distribution function
estimator technique
time-series data
Data Pre-Processing
filtering, buffering,
etc.
(optional)
iterated forecasting
1 Forecasting with
prediction
uncertainty
representation
3
Causal Adjustment
impacts of
•-budgets
•-economic factors
•-political factors
•-etc
2
Uncertainty
management via
learning
reduce uncertainty
in the prediction
by eliminating
unlikely outputs
4
simulated major events
that might occur along
prediction horizon
Scenario Construction
The Confidence Prediction
Neural Network (CPNN)
For CPNN, each node assigns a
weight (degree of confidence)
for an input X and a candidate
output Yi.
Final output is the weighted sum
of all candidate outputs.
In addition to the final output, the
confidence distribution of that
output
Numerator
Denominator
Confidence
distribution
approximator
Summation
layer
Pattern
layer
output can be computed as
Input layer
CD( X , Y )
(Y Yi )
1
1
C ( X , Yi ) exp[
]
2
(2 ) CD l i 1
2 CD
l
2
CPNN
Prognostic Results
Without reinforcement
learning
6
5
4
historical data
prediction
3
real failure time
2
0.9
0.8
0.7
0.6
0.5
0.4
1
0.3
0.2
0.1
0
95
96
97
98
99
100
101
dist of prognostic failure time
0
0
20
40
60
80
100
120
Prognostic Results
With reinforcement
learning
6
5
4
3
2
0.9
0.8
0.7
0.6
0.5
1
0.4
0.3
0.2
0.1
0
0
0
20
40
60
80
96
100
97
98
99
100
120
101
New Challenges for CBM/PHM Systems
Diagnostic and prognostic systems have so far been
– designed in an ad hoc manner
– static - in terms of performance
– passive - in that they only respond to events and never initiate
actions
– centralized - so that either the knowledge-base, control, or
model is centralized even for distributed frameworks
– tightly coupled - resulting in poor error-tolerant frameworks
– non-scalable
– non-portable - since they are very system specific, and
– require expert personnel to upgrade/update
Centralized Control & KB Architectures
Sensors
UUT
Events
Preprocessing
Knowledge
Base
Diagnostic
Algorithm
Sensors
UUT
Data-mining
Events
Sensors
UUT
Events
Feature
Extraction
Control
Prognostic
Algorithm
A Generic Central Control and Knowledge Base Framework
Diagnosis
Prognosis
Distributed Control & KB Architectures
Sensors
Knowledge
Fusion
UUT
Events
Diagnostic Algorithms
Central
Control
Diagnosis
PrognosticAlgorithms
Prognosis
Central
Knowledge
Base
Distributed Control and Knowledge
Base Framework
Hardwa
Hardware
r
e
Model-Based Software Architecture
System
(chiller, gas turbine,
etc.)
DAQ/CPU
ICAS
Shipboard
Systems /
Components
Preliminary Diagnostics
Intelligent Selection
Layer
Diagnostic Algorithms
Decision Support
Layer
Prognostic Algorithms
Online
Static and Dynamic
Case Library
Offline
Interface
Layer
Multiagent System
Intelligent Agent
Object Oriented Hybrid
System Models
Software Repository
Sensors
Designer
Statistics
Optimization
Performance
Assessment
Module
Offline
Prescription
Maintenance
Plan
Online
Online
Maintainer
Community
of Agents –
Multiagent
System
The System Modeling Approach
I. Concept of Hybrid System
The System Modeling Approach
(continued…)
II. The Object-Oriented Hybrid Model Architecture
Object-Oriented Modeling - PhysicsBased or Physical Modeling
System Concept - An Example JSF Propulsion System
Components
• Components
• Interconnections/ Couplings
Clutch
Lock
Actuator
#6 GB Brg
& Spanner
Nut
Geardrive
Shaft
Clutch
Pack
Actuator
1
2
#3
#4
#6
Semi-empirical models
Deterministic-stochastic models
Finite-element models
Carbon
Plates
Lock
Clutch Spline
Output
Shaft
Clutch
Input
Shaft
Drive
shaft
Interface
Physical Modeling in Prognosis
The concept of “Virtual Sensor”:
Measurable
Quantities
Problem:
Solution:
Physical
Model
Fault
Dimensions
Difficult or impossible to monitor in an
operational state fault dimensions.
Train a physical model (semi-empirical,
physics-based) to map measurable
quantities (vibration, temperature, etc.) into
fault dimensions (crack length, wear etc.
Control Architecture for Intelligent
Agent Paradigm
level 2
Interface
Control
level 1
Decision Support
Control
level 0
Intelligent Selection
Control
Figure 2: Subsumption architecture for Intelligent Agent.
Important Features of Agenthood
Cooperation
Autonomy
Adaptation
• Adaptation:
• Learning, Knowledge-Discovery
• Communication
• Self-Organization
• Cooperation:
• Agent Communication Language
• Cooperate with other Software
Agents/User Agents
• Form Agent Communities - MAS
• Autonomy:
• Proactive and Reactive
• Goal-directed
• Multi-threaded
The IA Paradigm: Agent-Oriented Programming (AOP), Agent-Oriented Design (AOD),
Agent-Oriented Software Engineering (AOSE)
Intelligence of Intelligent Agents
A simple reflex agent
A reflex agent with
internal states
Sensors
What actions I
should do now
Effectors
State
An agent with explicit
goals
Sensors
How the world
evolves
What the
world is like
What my
actions do
What actions I
should do now
State
How the world
evolves
What the
world is like
What my
actions do
What the world
will be after I do
action A
Effectors
What actions I
should do now
An agent with utility
State
How the world
evolves
What my
actions do
Varying degrees of intelligence
Recognize goals and intentions
React to unexpected situations in a robust manner
Focus of Research: Concepts of Learning, SelfOrganization, and Active Diagnosis
Effectors
Utility
Sensors
What the
world is like
What the world
will be after I do
action A
How happy I will
be in this state
What actions I
should do now
Effectors
ENVIRONMENT
Goals
Sensors
ENVIRONMENT
Conditionaction rules
ENVIRONMENT
Conditionaction rules
ENVIRONMENT
What the
world is like
Learning Issues & Approaches
Issues in Learning:
Incremental Learning Ability
Order Independence
Unknown Attribute Handling
Noisy Data Tolerance
Source Combination
Open Questions:
– What should be learned?
– When to learn?
– How to learn?
Sensors
Critic
feedback
changes
Learning
Element
Performance
Element
knowledge
Learning
goals
Problem
Generator
Effectors
Figure 5.1 A general model of learning agent [50].
Possible Solutions:
– Learn diagnostic rules via Episodic Information (Experiences)
– Learn when Episodic Information is not enough to handle current
scenario
– Aggregate learning episodes using some concept learning technique
ENVIRONMENT
–
–
–
–
–
Performance
Standard
Case-Based Reasoning & Learning
CBR - an episodic memory of past experiences
CBR - initial cases by examples
CBR Methodology:
Indexing (generate indices for classification and categorization)
Retrieval (retrieve the best past cases from the memory)
Adaptation (modify old solution to conform to new situation)
Testing (did the proposed solution work)
Learning (explain failed & store successful solutions)
Case Library
Failure Mode i
Case #
…
1
2
3
S1
Symptoms
S2 … Sm
Tests
Prescription
The Dynamic Case-Based Reasoning
Architecture
Sensory data
Feature interpretation
(static, dynamic, composite)
Case indexing
AS path
Analytical Models and algorithms
Indexing path selection
Indexing rules
PD path
Phase matching evaluator
Case retrieval
Case similarity calculation
Case memory
inactive
active
Propagation evaluator
Case adaptation
Model-based reasoner
New case constructor
Test/evaluation
Remembrance calculation
Failure driven learning
Model base
Structure of Static and Dynamic Case
Library
tfailure
Tests
Case #j
Time to Failure
TF1
TF2
TF3
…
…
Dynamic Case Library
Failure Mode i
Conditions
time
y1 y 2 … y m
t1
t2
t3
0
Case Library
Prescription
Tests
…
Static Case Library
Failure Mode i
Symptoms
Case #
S1 S2 … Sm
1
2
3
Concept Learning
Example 1
Has_A, 1/3
Has_C, 1/3
Has_B, 1/3
attrB: m
attrA: a
Has_A1, 1/2
Object A
attrC: 16
Has_A2, 1/2
attrA2: 2
attrA1: a
Example 2
Object A
Memory Aggregate (MA) approach:
– systematic learning from examples and
counter-examples
– incremental and order independent
– combines sources
– counter examples handled similarly by
building an MA called C_MA
MA based on Examples
1&2
Object A
Has_A, 1/2
Has_B, 2/5
Has_B, 1/2
attrA: a
Has_A1, 1/2
attrA1:b
Has_C, 1/5
Has_A, 2/5
attrB: m
Has_A2, 1/2
attrA2: 2
Has_B1, 1/1
attrB1: y
attrA: a,2/2 attrB: m2/2 attrC: 16,1/1
Has_A1, 2/4
attrA1:b,1/2
a, 1/2
Has_A2, 1/2
Has_B1, 1/1
attrA2: 2/2 attrB1: y,1/1
Concept CBR
Learning ‘Concepts’ as Case Library
– Storing Memory Aggregates that are sufficiently different
from each other as unique cases
Memory Aggregates are also used for Case Retrieval,
Adaptation, Testing, and Learning
For Diagnostic Framework, Concept CBR can learn:
– concept of “Normal Mode(s)” of operation given the sensor
and event readings as attributes
– concept of unique “Fault Modes” given that the modes
differ sufficiently in their signatures
Multiagent Systems (MAS)
An MAS is a loosely coupled network of problem
solvers that interact to solve problems that are
beyond the individual capabilities or knowledge.
Characteristics of MAS:
– each agent has incomplete information;
– there is no system global control;
– data is decentralized; and
– computation is asynchronous.
Multiagent Software Engineering (MaSE)
A Multiagent Diagnostic & Prognostic Framework
Global Perspective:
• Analysis and knowledge-distribution at
multiple levels of abstraction.
• The MAS framework becomes part of a
Decision Support System.
Levels
Of Abstraction
Decision Support
Framework
Inventory
Control Framework
Multiagent Diagnostic
and Prognostic System
Decision
Support
Inventory
Control
Sub-Domain Level:
Multiagent Diagnostic
and Prognostic System
Decision
Support
Inventory
Control
System Level:
Multiagent Diagnostic
and Prognostic System
Sub-system Level:
Multiagent Diagnostic
and Prognostic System
Component Level:
Multiagent Diagnostic
and Prognostic System
Domain Level:
Abstraction
Multiagent Diagnostic
& Prognostic Framework
Decision
Support
Decision
Support
Inventory
Control
Engineering a Multiagent System - I
1.1 Generate the best and safe Health
Estimate of the Domain Layer
Goal Hierarchy Diagram
– to specify goals and sub-goals
2.1 Get failures from local
knowledge
Sequence Diagram
– to establish possible roles and how
communicating agents will achieve them
3.1 Perform local diagnostic
and prognostic tests
2.2 Explain failures
of other agents that
are related
3.2 Ask others to help
explain local failures
Induced Agent Classes
– mapping from roles to agent
definitions
– aggregation of roles/agent classes
according to available resources
and similarity of roles
2.3 Ascertain risk and
reliability associated w
current diagnosis
4.1 Organize postings for
failures
ExplanationSeeker(k)
MessageOrganizer(i)
5.1 Send messagesPostMsg(src)
5.2 Receive and
to agents
organize messages
[Explain(src,,failure,time,
del_t)]
5.3 Remove
messages
ExplanationProvider(m)
5.4 Update
messages
5.5 Priori
according
PostMsgConfirmation
[Explain(src,tag,failure,time,del_t)]
FindAndCopyMsgs(src)
6.1 Tag messages to
make them unique
[Explain(*,*,failures…, ,)]
6.2 Search messages
PostMsg(src) …
[Explain(src,tag,failure,time,del_t)]
[SelfCheck(time, del_t)
Figure 3.5 Goal Hierarchy Diagram for a Diagnostic and Prognostic
RemoveMsg
[Explain(,tag, , ,)]
UpdateMsg
[Explain(,tag,failure…,,)]
FindAndCopyM
[Explain(,,*,,)]
PostMsg(src)…
Engineering Multiagent Systems - II
Mapping Roles to Agent Classes
– Diagnostic Agents
– Sensor Agents
– Black Board Agents
– Risk & Reliability
Assessment Agents
Active Diagnosis
Extends the offline ideas of “Probing” or “Testing”
It is biased to monitor normal conditions
Active Diagnosis Monitors consistency among data
Active Diagnosis of DES - A Design Time Approach
– the system itself is not diagnosable
– design a controller called “Diagnostic Controller” that will
make the system diagnosable
Active Diagnosis Possibilities:
– Inline with Intelligent Agent paradigm
– Collaboration in Multiagent Systems can be directed to
achieve Active Diagnosis
Active vs. Passive Diagnosis
Passive Diagnosis:
Diagnoser FSM that monitors events and
sensors to generate diagnosis.
A Diagnosable Plant generates a language
from which unobservable failure
conditions can be uniquely inferred by
the Diagnoser FSM.
Unobservable Failures
Plant
(Chiller/Pump & Valve)
Controller
Sensors
Diagnoser FSM
Observable
Events
Design-Time Active Diagnosis:
Observable
State
Diagnosis
Unobservable Failures
Design a controller that will make an
otherwise
“non-diagnosable”
plant
generate a language that is diagnosable.
Plant
(Chiller/Pump & Valve)
Controller
Diagnose
r
Diagnoser FSM
Observable
Events
Diagnosis
Sensors
Observable
State
Active Diagnosis - Agent Perspective
Given an anomalous situation,
Diagnostic Agent Plans, Learns, and
Coordinates.
– Learning takes place between
distributed agents that share their
Observable
Events
experiences
Network of
– Coordination helps search, retrieval, Diagnostic
Agents
adapting activities
– Planning is required to determine if
learning and coordination is possible in
the given expected time-to-failure
condition
“Run-time” Active Diagnosis
– non-intrusive
– autonomous and rational
Unobservable Failures
Plant
(Chiller/Pump & Valve)
Controller
Diagnostic
Agent
Diagnosis
Alarms/DB
Diagnostic Agent
Planning
Coordination
Learning
Sensor
Sensor
Agents
Agents
Observable
State
Performance Measures
(How to Compare
and
)
Measures
Precision for Prognosis
a measure of the narrowness of an interval in which the remaining life
falls
Reliability
how the system responds to individual component failures
Extensibility or Scalability
how the system can be extended if new components are added
Robustness
how the system tolerates uncertainty
Reuse or Portability
how easy or hard it is to use this system in another problem domain
Accuracy
how an agent improves true positives and true negatives as a result of
learning, self-organization, and active diagnosis
Entropy
a measure of how the system learns and organizes over time.
Decreasing entropy signifies increasing order in a multi-agent system,
resulting in more accurate and timely diagnoses
Network Activity
how much network related activity results if the framework is
implemented for distributed systems
Innovative Thrusts:
Intelligent Agent-based Distributed PHM Architecture
Error-tolerant, flexible, and scalable diagnostic/prognostic framework
Automated Prescription:
– What is wrong and how to I fix it?
– When do I fix it?
– How much confidence do I have that the system will not fail during the
execution of a mission?
Object-oriented modeling framework/physics-based models
Case-based reasoning paradigm - archive case studies - reason about
new situations
Open Systems Architecture - OSA CBM and ICAS compatible
Active Diagnosis / Prognosis notions
Performance Metrics / Performance based PHM modules
The Candidate Application
Domains
Shipboard
Processes - gas turbines, AC plants,
elevators, main fire systems, etc.
Propulsion / Drivetrain Components - clutch,
Seals, pumps, bearings, blades, etc.
Power Systems - generation, shipboard
distribution
Radar tracing and other communicationrelated systems
Other
Contributions
Development
of a new methodology for the
design of a diagnostic and prognostic
framework for large-scale distributed systems
Development of Run-time Active Diagnosis
approach / extension to Prognosis
Development of Learning Strategies for
diagnostic / prognostic problem domain
Development of performance measures for the
comparison of centralized vs. distributed
diagnostic and prognostic frameworks
Implementation Issues
Embedded Distributed Diagnostic Platform (EDDP)
Hardware:
– Modular I/O (e.g. NI’s FieldPoint System, or
MAX-IO).
– Embedded PC (e.g. MPC - Matchbox PC of
TIQIT or MAX-PC of Strategic-Test).
– Network (e.g. Ethernet, PROFIBUS, CAN).
Software:
– Windows CE, Linux, QNX, VxWorks, or OsX
operating systems.
– Embedded databases (like Polyhedra).
A Possible Agent Node
An Operator Interface
(LCD Display)
A Small PC
(MPC, MAX-PC)
Network (Ethernet, CAN, Profibus)
Distributed I/O System
(FieldPoint)
Sensors
Sensors
Sensors
CBM Performance Assessment
Objective:
– To assess the technical and economic feasibility of
various prognostic algorithms
Technical
Measures:
– Accuracy, Speed, Complexity, Scalability
Overall
Performance Measure:
– w1Accuracy + w2Complexity + w3Speed + …
(wi - weighting factors)
PM1
PM2
PM3
Algorithm #1
*
*
*
Algorithm #2
*
*
*
Algorithm #3
*
*
*
Performance
Assessment Matrix:
CBM Performance Assessment
Target
Measure:
PM yr (n f ) y p (n f ) yr (ns ) y p (ns )
Output y(n)
Real yr(n)
Behavior
Measure:
Predicted yp(n)
nf
PM w(i) yr (i) y p (i)
i ns
tpf
Discrete time n
Mean
E{t pf
and Variance Measures:
1
1
V {t } [t
} t (i )
N
N
N
N
i 1
pf
pf
i 1
2
(
i
)
E
{
t
}]
pf
pf
Complexity/Cost-benefit
Analysis
Complexity
Measure
t p td
computation time
complexity E
E
t
time to failure
pf
Cost/Benefit Analysis
–
–
–
–
frequency of maintenance
downtime for maintenance
dollar cost
etc.
Overall
Performance
Overall Performance = w1accuracy + w2complexity + w3cost + ….
Cost/Benefit Analysis
Establish
Baseline Condition - estimate cost of
breakdown or time-based preventive
maintenance from maintenance logs
A good percentage of Breakdown
Maintenance costs may be counted as CBM
benefits
If preventive maintenance is practiced,
estimate how many of these maintenance
events may be avoided.
The cost of such avoided maintenance events
is counted as benefit to CBM.
Cost/Benefit Analysis (cont’d)
Intangible
benefits - Assign severity index to
impact of BM on system operations
Estimate the projected cost of CBM, i.e. $ cost
of instrumentation, computing, etc.
Aggregate life-cycle costs and benefits from
the information detailed above
CINCLANTFLT Study
Question: “What is the value of prognostics?”
Summary of findings:
(1) Notional Development and Implementation for Predictive CBM Based on
CINFCLANTFLT I&D Maintenance Cost Savings
(2) Assumptions
–
–
–
–
–
CINCLANTFLT Annual $2.6B [FY96$] I&D Maintenance Cost
Fully Integrated CBM yields 30% reduction
Full Realization Occurs in 2017, S&T sunk cost included
Full Implementation Costs 1% of Asset Acquisition Cost
IT 21 or Equivalent in place Prior to CBM Technology
(3) Financial Factors
– Inflation rate:
– Investment Hurdle Rate:
– Technology Maintenance Cost:
(4) Financial Metrics:
4%
10%
10% Installed Cost
15 year 20 year
Concluding Remarks
CBM/PHM
are relatively new technologies sufficient historical data are not available
CBM benefits currently based on avoided
costs
Cost of on-board embedded diagnostics
primarily associated with computing
requirements
Advances in prognostic technologies
(embedded diagnostics, distributed
architectures, etc.) and lower hardware costs
(sensors, computing, interfacing, etc.) promise