Ray Polygon
Interception: Cyrus
Beck Algorithm
Mengxia Zhu
Fall 2007
Polygon and Polyhedron
Polygon and Polyhedron are fundamental objects in 2D
or 3D graphics.
In 2D, straight lines make a polygon, in 3D, an object if
often modeled as a polygonal “mesh”: a collection of
polygons that fit together. If the skin forms a closed
surface, the mesh is called polyhedron.
P
Ray Polygon Intersection
In order to analyze or render them, we usually need to
solve the intersection problem.
The general case of intersecting a line with a polygon
and polyhedron is quite complex. We study convex
forms with bounding lines or bounding planes first.
Solve how a ray intersects a convex polygon or convex
polyhedron is an essential technique in viewing 3D
objects.
Is a given point P inside or outside the object
Where does a given ray first intersect the object
Which part of a given line lies inside the object?
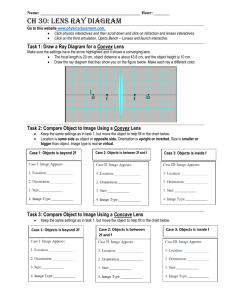
Ray Casting Ray Tracing examples
www.geocities.com/.../ coolhead1small2rot.png
www-evasion.imag.fr/. ../ecs177.html
Parametric Line Revisited
P1
P̂
P0
t
k
Pˆ k P0 t P1
k t 1
k,t 0
•P0 is the starting point
•P1 another point on the line
•P linear interpolation between
P0 and P1
•Affine combination, Convex
combination
Pˆ (1 t ) P0 t P1
P0 t ( P1 P0 )
0 t 1
Dot Product Revisited
V1
V2
V1 V2 V1 V2 cos
Supposethat V1 0 and V2 0.
Then,
V1 V2 0
V1 V2 0
2
2
V1 V2 0 0
2
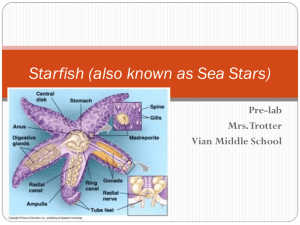
Point inside or outside?
P1
n outward normal
insdie half-space
outside half-space
P2
f
n
P3
W( )
n ( P3 f ) 0 P3
n ( P2 f ) 0 P2
n ( P1 f ) 0 P1 W ( )
Direction for Ray that Strikes Plane
r
n
r
nr 0
nr 0
nr 0
the ray is aimed “along with”
the normal
the ray is parallel to the plane
the ray is aimed “counter to”
the normal
Cyrus-Beck Algorithm
Developed by Cyrus and Beck in 1978
Clip line against convex polygon/polyhedron
Completely described by a set of “bounding lines or
planes”
Find a value of t for intersection of line and clipping
edges.
Use simple comparison of t values to find actual
clipping segment.
Where a Ray intersects a line(2D) or
plane(3D)
A point normal form of
edge or plane
Outside
P(t)
Nl ( P Pl ) 0
Inside
A parametric equation
of line:
P(t ) P0 t ( P1 P0 )
Find t such that
PL
N l [ P t Pl ] 0
c ( P1 P0 )
N l [ P0 tc Pl ] 0
N l ( P0 Pl ) N l ct 0
t N l ( Pl P0 ) / N l c
NL
Cyrus-Beck Algorithm (Cont’)
Classify the relative
position of the ray to
intercepting edge or
plane
If Nl ( P1 P0 ) 0:
ray
parallel to the edge of line
or plane
If Nl ( P1 P0 ) 0 : ray exiting
polygon
If Nl ( P1 P0 ) 0 : ray
entering polygon
Entering
n
P0
P1
Exiting
Each Bounding Line or Plane
We should find:
The
hit time of the ray
with the bounding line
or bounding plane
N l [ P t Pl ] 0
c ( P1 P0 )
N l [ P0 tc Pl ] 0
N l ( P0 Pl ) N l ct 0
t N l ( Pl P0 ) / N l c
Whether
the ray is
entering or exiting the
polygon or polyhedron.
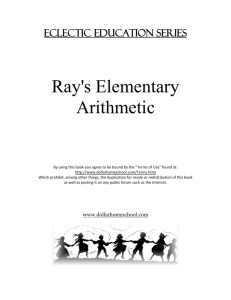
Cyrus-Beck Algorithm (Cont’)
Compute PE with largest t: max (tin, 0)
Compute PL with smallest t: min ( tout, 1)
P1
Clip to these two points
PL
PL
PE
PE
P0
Cyrus-Beck Algorithm (Cont’)
Initialize the candidate interval to [0,1]
For each bounding line, find the hit time of thit
and determine whether it is an entering or
exiting hit
If
t_hit is an entering hit, set t_in = max (tin, thit)
If t_hit is an exiting hit, set t_out = min (tout, thit)
If at any point tin becomes greater than t_out, the ray
misses P entirely, and testing is terminated.
If the candidate interval is not empty, then the segment
between tin and tout lies inside P.
Clipping Against Arbitrary Polygons
Polygon is no longer bounded by a
collection of infinite bounding lines in point
normal form.
We have to work with N finite segments
P2
P1
Clipping Against Arbitrary Polygons
Represent edge of P parametrically
For example, segment P3P4 is represented as: P3 + e3*u, where
e3=P4-P3, u ranges from 0 to 1.
Ray intersection with above segment is represented as: R + c*t =
P3 + e3*u
Find all of the hits of the ray with all edges of P and place
them in a list of the hit times.
The smallest value of t in hit-list is the first hit
Take the t values in pairs. The ray enters P at the first time
in each pair and exits from P at the second time of each
pair
Exercises
Draw an icosahedron by using the following drawing routine to use vertex
arrays. Icosahedron approximate a sphere by using 20 polygons.
After finish it, try to use recursive method to further divide each triangle to get
more triangles to better approximate the sphere.
#define x .525731112119133606
#define z .850650808352039932
void display (void) {static GLfloatv data[12][3] = { {-x,0.0,z},{x,0.0,z}, {-x,0.0,-z},{x,0.0,z},{0.0,z,x},{0.0,z,-x},{0.0,-z,x}, {0.0,-z,-x},{z,x,0.0},{-z,x,0.0},{z,-x,0.0},{-z,-x,0.0} };
static GLuinttindices[20][3] = {
{0,4,1},{0,9,4},{9,5,4},{4,5,8},{4,8,1},{8,10,1},{8,3,10},{5,3,8},{5,2,3},{2,7,3},{7,10,3},{7,
6,10},{7,11,6},{11,0,6},{0,1,6},{6,1,10},{9,0,11},{9,11,2},{9,2,5}, {7,2,11} };
Exercises
Implement a 2D/3D Cyrus-Beck Algorithm
for convex polygon or polyhedron by
prompt user to input a ray and a sequence
of bounding lines/bounding plane.
Output the enter point and exit point.
Exercises
for (i = 0; i < 20; i++) {
glVertex3fv(&vdata[tindices[i][0]][0]);
glVertex3fv(&vdata[tindices[i][1]][0]);
glVertex3fv(&vdata[tindices[i][2]][0]);
}
 0
0