akavia_07
advertisement

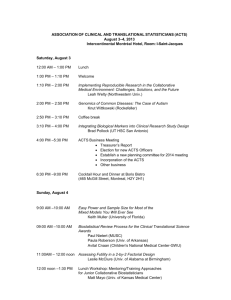
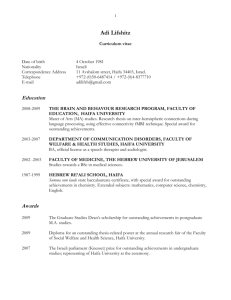
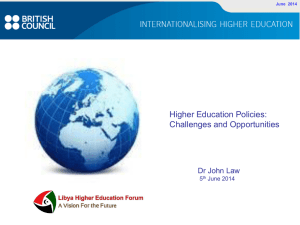
פברואר ,1968בסיום מסע למצדה יוני ,1969אודיטוריום פיסיקה ,בית-בירם פברואר ,1968בסיום מעלה האיסיים פברואר ,1969עובדת (מסע גדנ"ע) Image Registration of Remotely Sensed Data Nathan S. Netanyahu Dept. of Computer Science, Bar-Ilan University and Center for Automation Research, University of Maryland Collaborators: Jacqueline Le Moigne David M. Mount Arlene A. Cole-Rhodes, Kisha L. Johnson Roger D. Eastman Ardeshir Goshtasby Jeffrey G. Masek, Jeffrey Morisette Antonio Plaza Harold Stone Ilya Zavorin Shirley Barda, Boris Sherman Yair Kapach NASA / Goddard Space Flight Center University of Maryland Morgan State University, Maryland Loyola College of Maryland Wright State University, Ohio NASA / Goddard Space Flight Center University of Extremadura, Spain NEC Research Institute (Ret.) CACI International, Maryland Applied Materials, Inc., Israel Bar-Ilan University What is Image Registration / Alignment / Matching? The above image is rotated and shifted with respect to the left image. 2 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Motivation • A crucial, fundamental step in image analysis tasks, where final information is obtained by the combination / integration of multiple data sources. 3 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Motivation / Applications • Computer Vision (target localization, quality control, stereo matching) • Medical Imaging (combining CT and MRI data, tumor growth monitoring, treatment verification) • Remote Sensing (classification, environmental monitoring, change detection, image mosaicing, weather forecasting, integration into GIS) 4 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Application Examples • Global Wafer Alignment 5 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Wafer Alignment (cont’d) Courtesy: Shirley Barda and Boris Sherman, Applied Materials, Inc. 6 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Application Examples (cont’d) • Integration of medical images Registration of MR and PET images of the same person (courtesy: A. Goshtasby) 7 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Application Examples (cont’d) • Change Detection 1975 2000 Satellite images of Dead Sea, United Nations Environment Programme (UNEP) website 8 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Change Detection (cont’d) 1990 2005 Satellite images of Amona hilltop, Peace Now website 9 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Change Detection (cont’d) IKONOS images of Iran’s Bushehr nuclear plant, GlobalSecurity.org 10 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 What is the “Big Deal”? Bydo matching control points, e.g., corners, high-curvature points. How humans solve this? Zitova and Flusser, IVC 2003 11 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Automatic Image Registration • Books: – – – – • Surveys: – – – • A Survey of Image Registration Techniques, ACM Comp. Surveys, L.G. Brown, 1992 A Survey of Medical Image Registration, Medical Image Analysis, J.B.A. Maintz and M.A. Viergever, 1998 Image Registration Methods: A Survey, Image and Vision Computing, B. Zitova and J. Flusser, 2003 Sample Papers: – – – – – – 12 Medical Image Registration, J. Hajnal, D.J. Hawkes, and D. Hill (Eds.), CRC 2001 Numerical Methods for Image Registration, J. Modersitzki, Oxford University Press 2004 2-D and 3-D Image Registration, A. Goshtasby, Wiley 2005 Image Registration for Remote Sensing, J. LeMoigne, N.S. Netanyahu, and R.D. Eastman (Eds.), Cambridge University Press, in preparation. Image Sequence Enhancement Using Sub-pixel Displacements, CVPR, D. Keren, S. Peleg, and R. Brada, 1988 Improving Resolution by Image Registration, CVGIP, M. Irani and S. Peleg, 1991 Computing Correspondence Based on Regions and Invariants without Feature Extraction and Segmentation, CVPR, C. Lee, D. Cooper, and D. Keren, 1993 Robust Multi-Image Sensor Image Alignment, ICCV, M. Irani and P. Anandan, 1998 Fast Block Motion Estimation Using Gray Code Kernels, Israel CV Workshop, Y. Moshe and H. Hel-Or, 2006 Image Matching Using Photometric Information, Israel CV Workshop, M. Kolomenkin and I. Shimshoni, 2006 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Automatic Image Registration Components 0. Preprocessing – Image enhancement, cloud detection, region of interest masking 1. Feature extraction (control points) – Corners, edges, wavelet coefficients, segments, regions, contours 2. Feature matching – Spatial transformation (a priori knowledge) – Similarity metric (correlation, mutual information, Hausdorff distance) – Search strategy (global vs. local, multiresolution, optimization) 3. Resampling Tp I2 I1 13 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Example of Image Registration Steps Feature extraction Resampling Registered images after transformation Zitova and Flusser, IVC 2003 14 Feature matching Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Automatic Image Registration for Remote Sensing • Sensor webs, constellation, and exploration • Selected NASA Earth science missions • Domain-dependent characteristics 15 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Sensor Webs, Constellation, and Exploration Satellite/Orbiter, and In-Situ Data Automatic Multiple Source Integration Planning and Scheduling Intelligent Navigation and Decision Making 16 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Selected NASA Earth Science Missions 0.1 0.4 0.5 0.6 0.7 Instrument (Spat. Resol.) Number of Channels AVHRR (D) (1.1 km) 5 Channels 1 TRMM/VIRS (2 km) 5 Channels 1 Lands at4-MSS (80 m) 4 Channels Ultra Violet Visible Lands at5&7-TM&ETM+ (30 m) 7 Channels 2.0 3.0 2 3 2 3 4.0 5.0 6.0 7.0 8.0 Mid-IR 2 2 9.0 10.0 11.0 12.0 13.0 14.0 Thermal-IR 3 4 5 3 4 5 4 4 5 7 6 1 1 JERS-1 8 Channels (Ch1-4:18m; Ch5-8:24m) EO/1 ALI-MultiSpectr. ALI-Panchrom. Hyperion (30m) LAC 1.3 Near-IR 1 1 Lands at7-Panchromatic (15m) IRS-1 4 Channels LISS-I (73m) - LISS-2 (36.5m) SPOT-HRV Panchromatic (10m) 1 Channel Spot-HRV Multis pectral (20 m) 3 Channels MODIS 36 Channels (Ch1-2:250 m;3-7:500m;8-36:1km) 1.0 4 2 3 1 2 3 &4 3 5 678 6 7 1 3, 8-10 1' 9 Channels (30m) 1 Channel (10m) 220 Channels 1 2 1 1, 4, 12 1, 13, 14 2 3 1 2, 1619 15 5 26 5' 4 5 7 4 5-9 20-25 27 28 29 30 31 32 33-36 1 1 to 220 256 Channels 1 to 256 (250m) IKONOS-Panchromatic (1m) 1 Channel IKONOS-MS 4 Channels (4m) ASTER 14 Channels 1 1 2 3 4 1 2 3 2 3 4 5 6 7 (Ch1-3:15m;4-9:30m;10-14:90m) CZCS (1 km) 6 Channels SeaWiFS (D) (1.1 km) 8 Channels TOVS-HIRS2 (D) 20 Channels 1 1 2 3 4 5 20 8 19 (15 km) GOES 5 Channels (1 km:1, 4km:2,4&5, 8km:3) METEOSAT 3 Channels (V:2.5km,WV&IR:5km) 17 . 1 Visible 13,14 1 0,1 1 1 2 2 1 8 17 to 13 12 3 11 10 9 8 7 to 1 4 Water Vapor Akavia Memorial Lecture, Haifa Univ., 11.01.2007 5 IR 15.0 MODIS Satellite System From the NASA MODIS website 18 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 MODIS Satellite Specifications 19 Orbit: 705 km, 10:30 a.m. descending node (Terra) or 1:30 p.m. ascending node (Aqua), sun-synchronous, near-polar, circular Scan Rate: 20.3 rpm, cross track Swath Dimensions: 2330 km (cross track) by 10 km (along track at nadir) Telescope: 17.78 cm diam. off-axis, afocal (collimated), with intermediate field stop Size: 1.0 x 1.6 x 1.0 m Weight: 228.7 kg Power: 162.5 W (single orbit average) Data Rate: 10.6 Mbps (peak daytime); 6.1 Mbps (orbital average) Quantization: 12 bits Spatial Resolution: 250 m (bands 1-2) 500 m (bands 3-7) 1000 m (bands 8-36) Design Life: 6 years Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Landsat 7 Satellite System New Orleans, before and after Katrina 2005 (from the USGS Landsat website) 20 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Landsat 7 Satellite Specifications Launch Date April 15, 1999 Vehicle Delta II Site Vandenberg AFB Orbit Characteristics 21 Reference system WRS-2 Type Sun-synchronous, near-polar Altitude 705 km (438 mi) Inclination 98.2° Repeat cycle 16 days Swath width 185 km (115 mi) Equatorial crossing time 10:00 AM +/- 15 minutes Akavia Memorial Lecture, Haifa Univ., 11.01.2007 IKONOS Satellite System 22 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 IKONOS Satellite Specifications 23 Launch Date 24 September 1999 Vandenberg Air Force Base, California, USA Operational Life Over 7 years Orbit 98.1 degree, sun synchronous Speed on Orbit 7.5 kilometers per second Speed Over the Ground 6.8 kilometers per second Number of Revolutions Around the Earth 14.7 every 24 hours Orbit Time Around the Earth 98 minutes Altitude 681 kilometers Resolution Nadir: 0.82 meters panchromatic 3.2 meters multispectral 26° Off-Nadir 1.0 meter panchromatic 4.0 meters multispectral Image Swath 11.3 kilometers at nadir 13.8 kilometers at 26° off-nadir Equator Crossing Time Nominally 10:30 a.m. solar time Revisit Time Approximately 3 days at 40° latitude Dynamic Range 11-bits per pixel Image Bands Panchromatic, blue, green, red, near IR Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Domain-Dependent Characteristics • Very large images (~ 6200 x 5700 of typical Landsat 7 scene) • Practically “flat”, 2D images • Rigid/similar transformations • A priori knowledge (e.g., small rotation and scale) 24 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Challenges in Processing of Remotely Sensed Data • Multisource data • Multi-temporal data • Various spatial resolutions • Various spectral resolutions • Subpixel accuracy • 1 pixel misregistration ≥ 50% error in NDVI classification • Computational efficiency • Fast procedures for very large data sets • Accuracy assessment • Synthetic data • “Ground Truth" (manual registration?) • Consistency ("circular" registrations) studies 25 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Fusion of Multi-temporal Images Improvement of NDVI classification accuracy due to fusion of multi-temporal SAR and Landsat TM over farmland in The Netherlands (source: The Remote Sensing Tutorial by N.M. Short, Sr.) 26 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Integration of Multiresolution Sensors Registration of Landsat ETM+ and IKONOS images over coastal VA and agricultural Konsa site (source: LeMoigne et al., IGARSS 2003) 27 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Feature Extraction Gray levels BPF wavelet coefficients Binary feature map Top 10% of wavelet coefficients (due to Simoncelli) of Landsat image over Washington, D.C. (source: N.S. Netanyahu, J. LeMoigne, and J.G. Masek, IEEE-TGRS, 2004) 28 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Feature Extraction (cont’d) Image features (extracted from two overlapping scenes over D.C.) to be matched 29 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Feature Matching / Transformations • Given a reference image, I1(x, y), and a sensed image I2(x, y), find the mapping (Tp, g) which “best” transforms I1 into I2, i.e., I 2 ( x, y ) g ( I1 (Tp ( x, y ), Tp ( x, y ))), where Tp denotes spatial mapping and g denotes radiometric mapping. • Spatial transformations: Translation, rigid, affine, projective, perspective, polynomial • Radiometric transformations (resampling): Nearest neighbor, bilinear, cubic convolution, spline 30 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Transformations (cont’d) Objective: Find parameters of a transformation Tp (consisting of a translation, a rotation, and an isometric scale) that maximize similarity measure. x ' s cos x s sin y t x y ' s sin x s cos y t y s cos Tp s sin 0 31 s sin s cos 0 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 tx ty 1 Similarity Measures (cont’d) • L2 norm: Minimize sum of squared errors over overlapping subimage I 2 Tp I1 2 • Normalized cross correlation (NCC): Maximize normalized correlation between the images I ( x, y) I I 1 NCC ( I1 , I 2 ) x 1 2 y ( x, y ) I 2 I1 ( x, y) I1 I 2 ( x, y) I 2 2 x 32 y x y Akavia Memorial Lecture, Haifa Univ., 11.01.2007 2 Similarity Measures (cont’d) • Mutual information (MI): Maximize the degree of dependence between the images pI1 , I2 g1 , g 2 MI I1 , I 2 pI1 , I2 g1 , g 2 log , g1 g 2 pI1 g1 pI2 g 2 or using histograms, maximize 1 MI I1 , I 2 M 33 MhI1 , I2 g1 , g 2 hI1 , I2 g1 , g 2 log g1 g 2 hI1 g1 hI2 g 2 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Similarity Measures (cont’d), An Example MI vs. L2-norm and NCC applied to Landsat 5 images (source: Chen, Varshney, and Arora, IEEE-TGRS, 2003) 34 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Similarity Measures (cont’d), an MI Example Source: Cole-Rhodes et al., IEEE-TIP, 2003 35 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Similarity Measures (cont’d) • (Partial) Hausdorff distance (PHD): H K I1 , I 2 K pth1I1 min p2I2 dist p1 , p2 , where 1 K I1 K 1 K 2 K I1 36 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Similarity Measures (cont’d), PHD Example PHD-based matching of Landsat images over D.C. (source: Netanyahu, LeMoigne, and Masek, IEEE-TGRS, 2004) 37 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Feature Matching / Search Strategy • Exhaustive search • Fast Fourier transform (FFT) • Optimization (e.g., gradient descent; Thévenaz, Ruttimann, and Unser (TRU), 1998; Spall, 1992) • Robust feature matching (e.g., efficient subdivision and pruning of transformation space) 38 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Computational Efficiency • Extraction of corresponding regions of interest (ROI) • Hierarchical, pyramid-like approach • Efficient search strategy 39 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Computational Efficiency (cont’d), ROI Extraction UTM of 4 scene corners known from systematic correction Reference Scene Extract reference chips and corresponding input windows using mathematical morphology 2. Register each (chip-window) pair and record pairs of registered chip corners (refinement step) 3. Compute global registration from multiple local ones 4. Compute correct UTM of 4 scene corners of input scene Input Scene Advantages: • Eliminates need for chip database • Cloud detection can easily be included in process • Process any size images • Initial registration closer to optimal registration => reduces computation time and increases accuracy. 40 1. Source: Plaza, LeMoigne, and Netanyahu, MultiTemp, 2005 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Computational Efficiency (cont’d), An Example of a Pyramid-Like Approach 32 x 32 64 x 64 0 1 2 128 x 128 ss t x 2t x t y 2t y 256 x 256 41 3 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 IR Example Using Partial Hausdorff Distance 64 x 64 128 x 128 256 x 256 42 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 IR Example Using PHD (cont’d) Source: Netanyahu, LeMoigne, and Masek, IEEE-TGRS, 2004 43 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 IR Components (Revisited) Features Similarity Measure Strategy 44 Gray Levels Correlation Fast Fourier Transform Wavelets or Wavelet-Like Edges L2-Norm Gradient Descent Mutual Information Thevenaz, Ruttimann, Unser Optimization Hausdorff Distance Spall’s Optimization Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Robust Feature Matching IR Components (Revisited) Features Similarity Measure Strategy FFT Correlation L2-Norm Gradient Descent Thevenaz, Ruttimann, Unser Optimization L2-Norm MI MI Hausdorff Distance Robust Feature Matching Spall’s Optimization Gradient Descent 45 Simoncelli BPF Spline or Simoncelli LPF Gray Levels Thevenaz, Ruttimann, Unser Optimization Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Spall’s Optimization Goals of a Modular Image Registration Framework • Testing framework to: – Assess various combinations of components – Assess a new registration component • Web-based registration tool would allow user to “schedule” combination of components, as a function of: – Application – Available computational resources – Required registration accuracy • Prototype of web-based registration toolbox: – Several modules based on wavelet decomposition – Java implementation; JNI-wrapped functions 46 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Web-Based Image Registration Toolbox TARA (“Toolbox for Automated Registration & Analysis”) 47 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Web-Based Image Registration Toolbox TARA (“Toolbox for Automated Registration & Analysis”) 48 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Current and Future Work • Conclude component evaluation – Sensitivity to noise, radiometric transformations, initial conditions, and computational requirements – Integration of digital elevation map (DEM) information • Build operational registration framework/toolbox – Web-based – Applications: • EOS validation core sites • Other EOS satellites (e.g., Hyperion vs. ALI registration) and beyond • Image fusion, change detection 49 Akavia Memorial Lecture, Haifa Univ., 11.01.2007 Back to the Moon View of the moon, as seen from Apollo 11 (1969( “Icarus fell because he flew too close to the sun. Columbia - and the whole American manned space program today - fell because it flies too close to the Earth” – Charles Krauthammer (Feb. 2003)